
Как работает радар кратко
Обновлено: 05.07.2024
Радиолокация с момента своего возникновения, в первую очередь, была нацелена на решение военных задач, но сегодня без ее помощи человек не может обходиться и в своей повседневной жизни – это мобильная связь, авиаперелеты, медицинская диагностика и многое другое. Данное издание может заинтересовать даже тех, кто совсем далек от радиотехники. Пролистаем книгу вместе и расскажем вкратце об основных понятиях, физических основах радиолокации и структуре РЛС.
Первые эксперименты: радиоволны в открытом море
С помощью радиолокации обеспечивается решение широкого круга задач, связанных с обнаружением воздушных и наземных объектов (целей), навигацией (обеспечением вождения) различных судов (воздушных и морских), с управлением воздушным и морским движением, управлением средствами ПВО, с обеспечением безопасности движения транспортных средств, с предсказанием возникновения погодных явлений, а также с поражением наземных (морских) и воздушных объектов в любое время суток и в любых метеоусловиях. Помимо этого, основываясь на принципах радиолокации, решаются задачи, связанные с диагностикой организма человека. Как видите, спектр задач, решаемых радиолокацией, достаточно широк несмотря на то, что радиолокация сравнительно молодое научное направление.
![Самолет_дальнего_радиолокационного_обнаружения_и_управления_А_50У.jpg]()
Самолет дальнего радиолокационного обнаружения и управления А-50У

Как и любое направление развития науки и техники, радиолокация базируется на некоторых физических основах, позволяющих обеспечивать решение стоящих перед ней задач, а именно: обнаруживать различного рода объекты и определять координаты и параметры их движения с помощью радиоволн.
Использование радиоволн, или, другими словами, электромагнитных колебаний (ЭМК), частотный диапазон которых сосредоточен в пределах от 3 кГц до 300 ГГц, определяет основные преимущества радиолокационных систем (РЛС) перед другими системами локации (оптическими, инфракрасными, ультразвуковыми). В первую очередь, это обусловлено тем, что закономерности распространения радиоволн в однородной среде достаточно стабильны как в любое время суток, так и в любое время года и, следовательно, изменение условий оптической видимости, обусловленных появлением дождя, снега, тумана или изменением времени суток, не нарушает работоспособность РЛС.
Основными закономерностями распространения радиоволн, которые позволяют обнаруживать объекты и измерять координаты и параметры их движения, являются следующие:
– постоянство скорости и прямолинейность распространения радиоволн в однородной среде (при проведении инженерных расчетов скорость распространения радиоволн принимают равной 3·10 –8 м/с;
– способность радиоволн отражаться от различных областей пространства, электрические или магнитные параметры которых отличаются от аналогичных параметров среды распространения;
– изменение частоты принимаемого сигнала по отношению к частоте излученного сигнала при относительном движении источника излучения и приемника радиолокационного сигнала.
Последнее свойство радиоволн в радиолокации называют эффектом Доплера по имени австрийского ученого Кристиана Андреаса Доплера, который в 1842 году теоретически обосновал зависимость частоты колебаний, воспринимаемых наблюдателем, от скорости и направления движения источника волны и наблюдателя относительно друг друга.
![радиолокатор АОРЛ-1АС_1.jpg]()
Доплеровский метеорологический радиолокатор

Для проведения процедуры измерения расстояния до цели РЛС излучает в ее направлении зондирующий сигнал. Данный сигнал доходит до объекта, отражается от него и возвращается обратно к РЛС. Поскольку, как отмечалось ранее, скорость распространения радиосигнала в однородной среде постоянная, то для определения дальности до объекта необходимо зафиксировать момент излучения зондирующего сигнала t0 и момент приема отраженного сигнала от цели t1. В результате разность (t1 – t0) позволяет определить время, в течение которого радиоволна проходит путь от РЛС к цели и обратно, которое равно 2Д, где Д – дальность до объекта (расстояние между РЛС и целью). Разность времен (t1 – t0) в радиолокации называют временем запаздывания и обозначают как tд. В результате при известной величине tд можно составить равенство 2Д = Сtд, из которого следует, что дальность до объекта (цели) равна Д = Сtд/2.
Таким образом, подводя итог процедуре измерения дальности до цели, можно констатировать, что для измерения с помощью РЛС расстояния до цели необходимо определить время запаздывания tд, которое при известной скорости распространения радиоволн позволяет определить дальность до нее.
Большой процент объектов радиолокационного наблюдения составляют подвижные или движущиеся цели. К таким целям, например, относятся самолеты, вертолеты, автомобили, люди и т.д. Основным отличительным признаком таких объектов является скорость их движения. Выявить эффект движения цели, как отмечалось ранее, можно, опираясь на эффект Доплера, который позволяет определить радиальную скорость движения цели. То есть частота принимаемых РЛС колебаний от цели, двигающейся ей навстречу, возрастает по сравнению со случаем неподвижной цели и уменьшается при удалении цели от РЛС. Данное изменение частоты принимаемого сигнала называют доплеровским смещением частоты. Величина данного смещения зависит от скорости взаимного движения носителя РЛС и цели. Необходимо заметить, что рассмотренные свойства радиоволн будут проявляться вне зависимости от условий оптической видимости в зоне радиолокационного наблюдения.
Основные классы РЛС
Выполнение частной задачи радиолокационного наблюдения, например обнаружения цели или измерения дальности до нее, осуществляется с помощью одноименных радиолокационных устройств – радиолокационного обнаружителя или радиолокационного измерителя дальности соответственно. Совокупность радиолокационных устройств, предназначенных для решения какой-либо общей задачи, например обеспечения перехвата воздушной цели либо поражения наземной цели и т. п., называется радиолокационной системой (РЛС), или радиолокатором. Техническая реализация такой системы обычно именуется радиолокационной станцией, а в англоязычной литературе – радаром.
Источником информации о цели в радиолокации служит радиолокационный сигнал. В зависимости от способов формирования радиолокационного сигнала различают следующие типы РЛС, или методы радиолокации.
1. Активные РЛС, или активный метод радиолокационного наблюдения. При данном методе с помощью РЛС формируется радиосигнал, который излучается в направлении на цель (зондирующий сигнал). В результате взаимодействия зондирующего сигнала с целью образуется отраженный сигнал, который поступает на вход приемника РЛС и затем обрабатывается в данном устройстве в целях извлечения информации о наблюдаемой цели. Данный метод радиолокационного наблюдения получил наибольшее распространение в современных РЛС. Необходимо заметить, что при использовании активного метода устройство формирования радиосигнала (передатчик) и приемник РЛС находятся в одной точке пространства.
2. Активные РЛС с активным ответом. Как и в предыдущем случае, с помощью РЛС формируется радиосигнал, который излучается в направлении на цель (зондирующий сигнал). Однако радиолокационный сигнал формируется не в результате отражения излучаемых электромагнитных колебаний целью, а за счет переизлучения их с помощью специального устройства, именуемого ответчиком-ретранслятором. Данный метод широко используется в системах определения государственной принадлежности наблюдаемых объектов, управления воздушным движением, а также в радионавигационных системах.
4. Пассивная радиолокация, или пассивный метод радиолокационного наблюдения, основан на приеме собственного радиоизлучения целей. Отличительной особенностью таких систем является наличие в их составе только приемного устройства. Отсутствие необходимости формирования зондирующего колебания делает такие системы высокопомехозащищенными. Данные РЛС широко применяются при пеленгации радиоизлучающих систем противника, например РЛС, входящих в систему управления ПВО противоборствующей стороны.
Таким образом, радиолокационные системы могут быть активными, полуактивными, активными с активным ответом и пассивными. Кроме того, все существующие РЛС можно разделить на следующие основные группы.
В то же время необходимо отметить, что, несмотря на проведенное выше разделение РЛС на классы, существуют специальные РЛС, которые строятся под решение специфических задач и под данное разделение на классы не подпадают. Например, РЛС, решающие задачи диагностики состояния организма человека либо наблюдения объектов, скрытых за преградами, либо наблюдения космических объектов и т.п. Но в целом приведенная классификация позволяет разделить все существующие РЛС по функциональному предназначению.
Состав элементов радиолокационной системы, конечно же, зависит от назначения системы и задач, решение которых возлагается на нее. Тем не менее можно рассмотреть некоторую обобщенную структуру РЛС и рассказать о предназначении элементов такого радиолокатора.
Представим структурную схему гипотетической РЛС, в основу работы которой положен активный метод радиолокации при импульсном режиме излучения, то есть с использованием импульсных зондирующих сигналов в виде чередующихся во времени отрезков колебаний.
На данной структурной схеме можно представить шесть основных элементов типовой РЛС, которые будут иметь место вне зависимости от принципов ее построения, – передатчик (ПРД), приемник (ПРМ), антенная система (АНТ), антенный переключатель (АП), система управления и синхронизации, система обработки.
Передатчик, или передающий тракт РЛС, обеспечивает формирование зондирующего радиосигнала, усиление его до требуемого уровня мощности и передачу в антенную систему. Антенна в импульсном радиолокаторе работает как на передачу, так и на прием. Переключение антенны из режима излучения в режим приема обеспечивается с помощью антенного переключателя, который управляется сигналами системы управления и синхронизации.
Приемник РЛС обеспечивает предварительное преобразование принятого сигнала. Во-первых, осуществляет доведение уровня принятого сигнала до необходимого значения для успешной работы последующих узлов радиолокатора. Во-вторых, осуществляет преобразование (чаще уменьшение) несущей частоты принимаемого сигнала для снижения требований к элементам системы обработки. В-третьих, обеспечивает предварительную селекцию полезного сигнала (сигнала, отраженного от цели) из сигналов помех, которые действуют одновременно с полезным сигналом.
После предварительного преобразования в приемнике сигнал поступает в систему обработки, в которой решаются задачи по выделению из принятого сигнала информации о цели. Система обработки в современных РЛС представляет собой цифровую вычислительную систему, подобную обычному компьютеру или совокупности компьютеров. Поэтому данный элемент РЛС часто еще называют цифровой системой обработки.
Принцип действия радара заключается в облучении радиоволнами объекта, получении от него отражения и определении по нему положения и параметров движения объекта.
Всё предельно просто. Вы в горах, кричите - АУ! в сторону противоположной стены ущелья. И прислушиваетесь. Ваш крик долетел до той стороны и отразился. Замеряете время между криком и эхом, скажем 1.5с, умножаете на скорость звука 330м/с и определяете, что расстояние равно 495м. Да, забыл – пополам разделить нужно. Туда-сюда, ведь, звук летал. То есть округлённо имеем 250м. Трудно измерить 1.5с? Ну это Ваши проблемы. Повышайте точность и быстродействие своей аппаратуры – ушей, секундомера, руки, жмущей на его кнопку.
Вы скажете – Автор! Ты никогда не бывал в горах? Эхо придёт со всех сторон и будет перекликаться пару секунд, какие измерения?
Учтём это в следующей модели нашего локатора. Кричать теперь будем через длиннющий рупор, а слушать эхо поручим помощнику, который одно ухо прикрывает, чтоб не оглушаться непосредственно от кричащего, а другим слушает через такой же рупор, направленный в ту же сторону. Чтобы он вовремя включил секундомер, мы дадим ему тактирующий импульс - шлепок по…, ну как сами решите. Эти два рупора придают нашему радару направленные свойства – мы отсекаем ненужные нам отражения с других направлений. Кроме того, они увеличат дальность действия.
Мы с Вами построили звуковой радар, точнее звуколокатор, радар всё же от слова радио. Ну ладно, не мы с Вами. Американцы. Вот такой, в 20-х годах прошлого века. Но и они не были первыми.
Фото - общественное достояние. Пассивный звуковой локатор. Только определение направления на цель. Измерение дальности невозможно ввиду отсутствия зондирующего сигнала.
Фото - общественное достояние. Пассивный звуковой локатор. Только определение направления на цель. Измерение дальности невозможно ввиду отсутствия зондирующего сигнала.
Теперь представьте, что это было ночью, или в тумане. Нам хотелось бы иметь информацию со всех направлений. Для этого крикнем много раз, поворачивая наши рупоры на определенный угол по компасу. Результаты нанесем на лист бумаги, получим карту стен вокруг нас.
Больших дальностей действия крика и отклика не получится. Пробовали, небось, докричаться – Вова, пора домой! Никакого отражения! Лучше по радио – дозвониться. Поэтому мы тоже используем радиоволны. Они и пошустрее немного. Не 330м/с, а 300 000 000м/с. Это значит, что за 1 миллионную долю секунды, микросекунду, как говорят радиотехники, волна распространится на 300м. А если считать туда-обратно, то пролетит 150м, отразится, если наткнётся на что-то, и вернётся. Таким образом, считая микросекунды от шлепка, пардон, излучения импульса, до его возвращения в качестве эха, можем измерять дальность. И показать оператору радара на электронном индикаторе. Предположим, что мы проектируем радар для обзора воздушной обстановки. Используем осциллографическую трубку. Проградуируем её экран не в мкс, а непосредственно в километрах. Будет примерно вот такая картинка.
Здесь считать микросекунды незачем, просто запускаем развёртку осциллографа и одновременно излучаем импульс зондирующего радиосигнала (ЗС). Длину развёртки калибруем по механическим меткам на защитном стекле. Такую картину мы можем получить, если наши рупоры, пардон, антенны будут направлены строго на цель. А если мы установим их на вращающемся основании, дадим вращение и будем излучать ЗС через каждый пройденный градус, то уже можем сделать индикатор кругового обзора, где, условно говоря, развёртку индикатора дальности будем вращать синхронно с антенной вокруг нулевой точки, которую установим в центр экрана. Будем иметь вот такую картину
![]()
Радиолокационная станция (РЛС) или рада́р (англ. radar от Radio Detection and Ranging — радиообнаружение и дальнометрия) — система для обнаружения воздушных, морских и наземных объектов, а также для определения их дальности и геометрических параметров. Использует метод, основанный на излучении радиоволн и регистрации их отражений от объектов. Английский термин-акроним появился в 1941 г., впоследствии в его написании прописные буквы были заменены строчными.
Содержание
История
В 1887 году немецкий физик Генрих Герц начал эксперименты, в ходе которых он открыл существование электромагнитных волн, предсказанных теорией Джеймса Максвелла. Герц научился генерировать и улавливать электромагнитные радиоволны и обнаружил, что они по-разному поглощаются и отражаются различными материалами.
Одно из первых устройств, предназначенных для радиолокации воздушных объектов продемонстрировал 26 февраля 1935 г. шотландский физик Роберт Ватсон-Ватт, который примерно за год до этого получил первый патент на изобретение подобной системы.
Россия
В Советском Союзе осознание необходимости средств обнаружения авиации, свободных от недостатков звукового и оптического наблюдения, привела к разворачиванию исследований в области радиолокации. Идея, предложенная молодым артиллеристом Павлом Ощепковым получила одобрение высшего командования: наркома обороны СССР К. Е. Ворошилова и его заместителя - М. Н. Тухачевского.
Классификация радаров

По предназначению радиолокационные станции можно классифицировать следующим образом:
- РЛС обнаружения;
- РЛС управления и слежения;
- Панорамные РЛС;
- РЛС бокового обзора;
- Метеорологические РЛС.
По сфере применения различают военные и гражданские РЛС.
По характеру носителя:
- Наземные РЛС
- Морские РЛС
- Бортовые РЛС
По типу действия
- Первичные или пассивные
- Вторичные или активные
- Совмещённые
По диапазону волн:
- Метровые
- Сантиметровые
- Миллиметровые
Устройство и принцип действия Первичного радиолокатора
Первичный (пассивный) радиолокатор, в основном, служит для обнаружения целей, освещая их электромагнитной волной и затем принимая отражения (эхо) этой волны от цели. Поскольку скорость электромагнитных волн постоянна (скорость света), становится возможным определить расстояние до цели, основываясь на измерении времени распространения сигнала.
В основе устройства радиолокационной станции лежат три компонента: передатчик, антенна и приёмник.
Передающее устройство является источником электромагнитного сигнала высокой мощности. Он может представлять из себя мощный импульсный генератор. Для импульсных РЛС сантиметрового диапазона — обычно магнетрон или импульсный генератор работающий по схеме: задающий генератор — мощный усилитель, использующий в качестве генератора чаще всего лампу бегущей волны, а для РЛС метрового диапазона, часто используют — триодную лампу. В зависимости от конструкции, передатчик работает либо в импульсном режиме, формируя повторяющиеся короткие мощные электромагнитные импульсы, либо излучает непрерывный электромагнитный сигнал.
Антенна выполняет фокусировку сигнала приёмника и формирование диаграммы направленности, а также приём отражённого от цели сигнала и передачу этого сигнала в приёмник. В зависимости от реализации приём отражённого сигнала может осуществляться либо той же самой антенной, либо другой, которая иногда может располагаться на значительном расстоянии от передающего устройства. В случае, если передача и приём совмещены в одной антенне, эти два действия выполняются поочерёдно, а чтобы мощный сигнал, просачивающийся от передающего передатчика в приёмник не ослепил приёмник слабого эха, перед приёмником размещают специальное устройство, закрывающее вход приёмника в момент излучения зондирующего сигнала.
Приёмное устройство выполняет усиление и обработку принятого сигнала. В самом простом случае результирующий сигнал подаётся на лучевую трубку (экран), которая показывает изображение, синхронизированное с движением антенны.
Когерентные РЛС
Импульсные РЛС
Современные радары сопровождения построены как импульсные радары. Импульсный радар передаёт только в течение очень краткого времени, короткий импульс обычно приблизительно микросекунда в продолжительности, после чего он слушает эхо, в то время как импульс распространяется.
Поскольку импульс уходит далеко от радара с постоянной скоростью, время прошедшее с момента, когда импульс посылали, ко времени когда эхо получено, — ясная мера прямого расстояния до цели. Следующий импульс можно послать только через некоторое время, а именно после того как импульс придёт обратно, это зависит от дальности обнаружения радара (данным мощностью передатчика, усилением антенны и чувствительностью приёмника). Если бы импульс посылали раньше, то эхо предыдущего импульса от отдалённой цели могло бы быть перепутано с эхом второго импульса от близкой цели.
Промежуток времени между импульсами называют интервалом повторения импульса, обратная к нему величина — важный параметр, который называют частотой повторения импульса (ЧПИ) . Радары низкой частоты дальнего обзора, обычно имеют интервал повторения в несколько сотен импульсов в секунду (или Герц [Гц]). Частота повторения импульсов является одним из отличительных признаков, по которым возможно дистанционное определение модели РЛС.
Устранение пассивных помех
Одной из основных проблем импульсных РЛС является избавление от сигнала, отражающегося от неподвижных объектов: земной поверхности, высоких холмов и т. п. Если к примеру, самолёт находится на фоне высокого холма, отражённый сигнал от этого холма полностью перекроет сигнал от самолёта. Для наземных РЛС эта проблема проявляется при работе с низколетящими объектами. Для бортовых импульсных РЛС она выражается в том, что отражение от земной поверхности затеняет все объекты, лежащие ниже самолёта с радиолокатором.
Методы устранения помех используют, так или иначе, эффект Доплера (частота волны, отражённой от приближающегося объекта, увеличивается, от уходящего объекта — уменьшается).
Самый простой радар, который может обнаружить цель в помехах — радар с селекцией движущихся целей (СДЦ) — импульсный радар, который сравнивает отражения более чем от двух или больше интервалов повторения импульса. Любая цель, которая, движется относительно радара, производит изменение в параметре сигнала (стадия в последовательном СДЦ), тогда как помехи остаются неизменными. Устранение помех происходит путём вычитания отражений из двух последовательных интервалов. На практике устранение помех может быть осуществлено в специальных устройствах — черезпериодных компенсаторах или алгоритмами в программном обеспечении.
СДЦ, работающие с постоянной частотой повторения импульсов, имеют фундаментальную слабость: они являются слепыми к целям со специфическими круговыми скоростями (которые производят изменения фаз точно в 360 градусов), и такие цели не отображаются. Скорость, при которой цель исчезает для радиолокатора, зависит от рабочей частоты станции и от частоты повторения импульсов. Современные СДЦ излучают несколько импульсов с различной частоты повторения — такой, что невидимые скорости в каждой частоте повторения импульсов охвачены другими ЧПИ.
Другой способ избавления от помех реализован в импульсно-доплеровских РЛС, которые используют существенно более сложную обработку чем РЛС с СДЦ.
Важное свойство импульсно-доплеровских РЛС — это когерентность сигнала. Это значит, что посланные сигналы и отражения должны иметь определённую фазовую зависимость.
Импульсно-доплеровские РЛС обычно считаются лучше РЛС с СДЦ при обнаружении низколетящих целей во множественных помехах земли, это — предпочтительная техника, используемая в современном истребителе, для воздушного перехвата/управления огнём, примеры тому AN/APG-63, 65, 66, 67 и 70 радары. В современном доплеровском радаре большинство обработки выполняется отдельным процессором в цифровом виде с помощью цифровых сигнальных процессоров, обычно используя высокопроизводительный алгоритм Быстрое преобразование Фурье для преобразования цифровых данных образцов отражений кое во что более управляемое другими алгоритмами. Цифровые обработчики сигналов очень гибки и используемые алгоритмы могут обычно быстро заменяться другими, заменяя только память (ПЗУ) чипы, таким образом быстро противодействуя техники глушения противника если необходимо.
Устройство и принцип действия Вторичного радиолокатора
Принцип действия вторичного радиолокатора несколько отличается, от принципа Первичной радиолокации. В основе устройства Вторичной радиолокационной станции лежат компоненты: передатчик, антенна, генераторы азимутальных меток, приёмник, сигнальный процессор, индикатор и самолётный ответчик с антенной.
Передатчик. Служит для излучения импульсов запроса в антенну на частоте 1030 МГц
Антенна. Служит для излучения и приёма отражённого сигнала. По стандартам ICAO для вторичной радиолокации, антенна излучает на частоте 1030МГц, и принимает на частоте 1090 МГц.
Генераторы Азимутальных меток. Служат для генерации Азимутальных меток (Azimuth Change Pulse или ACP) и генерации Метки Севера (Azimuth Reference Pulse или ARP). За один оборот антенны РЛС генерируется 4096 малых азимутальных меток(для старых систем), или 16384 Малых азимутальных меток (для новых систем), их ещё называет улучшенные малые азимутальные метки (Improved Azimuth Change pulse или IACP), а также одну метку Севера. Метка севера приходит с генератора азимутальных меток, при таком положении антенны, когда она направлена на Север, а малые азимутальные метки служат для отсчёта угла разворота антенны.
Приёмник. Служит для приёма импульсов на частоте 1090 МГц
Сигнальный процессор. Служит для обработки принятых сигналов
Индикатор Служит для индикации обработанной информации
Самолётный ответчик с антенной Служит для передачи импульсного радиосигнала, содержащего дополнительную информацию, обратно в сторону РЛС при получении радиосигнала запроса.
Принцип Действия Принцип действия вторичного радиолокатора заключается в использовании энергии самолётного ответчика, для определения положения Воздушного судна. РЛС облучает окружающее пространства запросными импульсами на частоте P1 и P3, а также импульсом подавления P2 на частоте 1030 МГц. Воздушные суда оборудованные ответчиками находящиеся в зоне действия луча запроса при получении запросных импульсов, если действует условие P1,P3>P2 отвечают запросившей РЛС, Серией кодированных импульсов на частоте 1090 МГц, в которых содержится дополнительная информация типа Номер борта, Высота и так далее. Ответ самолётного ответчика зависит от режима запроса РЛС, а режим запроса определяется растоянием между запросными импульсами P1 и P3 например в режиме запроса А (mode A), расстояние между запросными импульсами станции P1 и P3 равно 8 микросекунд, и при получении такого запроса ответчик воздушного судна кодирует в импульсах ответа свой номер борта. В режиме запроса C (mode C) расстояние между запросными импульсами станции равно 21 микросекунде и при получении такого запроса ответчик воздушного судна кодирует в импульсах ответа свою высоту. Также РЛС может посылать запрос в смешанном режиме, например Режим А, Режим С, Режим А, Режим С. Азимут Воздушного судна определяется, углом поворота антенны, который в свою очередь определяется путём подсчёта Малых Азимутальных меток. Дальность определяется, по задержке пришедшего ответа Если Воздушное судно не лежит в зоне действия основного луча, а лежит в зоне действия боковых лепестков, или находится сзади антенны, то ответчик Воздушного судна при получении запроса от РЛС, получит на своём входе условие, что импульсы P1,P3
Плюсы вторичной РЛС, более высокая точность, дополнительная информация о Воздушном Судне (Номер борта, Высота), а также малое по сравнению с Первичными РЛС излучение.
Прежде, чем переходить к конкретным приборам, кратко познакомимся с основными элементами и принципами работы радиолокатора.
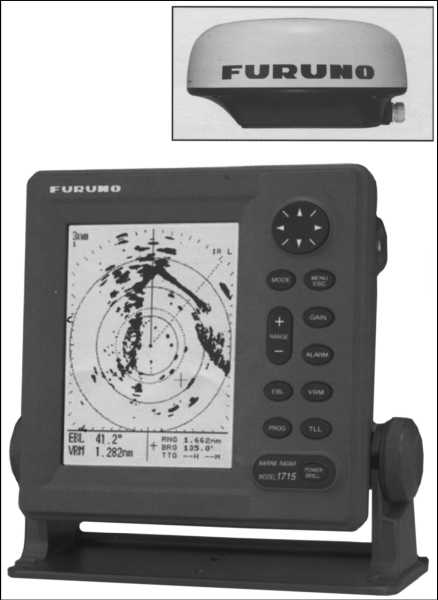
Рис. 1. Состав судового радиолокатора

Рис. 2. Принцип действия судового радиолокатора
Основные характеристики радаров
Функциональные возможности радиолокатора определяются рядом характеристик, понимание которых позволяет сделать правильный выбор аппарата, в той или иной степени удовлетворяющего потребностям владельца судна. Познакомимся с некоторыми из них.
Дальность действия
Дальность действия радара, указываемая в его паспортных данных – это его важнейший, но далеко не однозначный показатель, и в реальных условиях дальность обнаружения различных целей не всегда будет совпадать с заявленной.
Дальность обнаружения зависит от многих факторов – отражательной способности цели (характеризуемой т. н. ЭПР – эффективной поверхностью рассеяния), ее контрастностью по отношению к фону, высотой антенны и цели, состоянием атмосферы и моря. Поэтому, данная характеристика задается дифференцированно по типам целей и условиям работы радара. В соответствии с требованиями Международной Морской Организации IMO, при нормальных условиях распространения радиоволн, высоте установки антенны РЛС 15 м над уровнем воды и при отсутствии помех от моря, РЛС должна обеспечивать четкую индикацию:
- при высоте берега до 60 м на расстоянии до 20 морских миль;
- при высоте берега до 6 м на расстоянии до 7 морских миль.
- судов валовой вместимостью 5000 т на расстоянии 7 морских миль независимо от ракурса;
- небольшого судна длиной 10 м на расстоянии 3 морских мили;
- объектов, аналогичных навигационному бую, имеющих ЭПР приблизительно 10 кв. м, на расстоянии 2 морских мили.
Поскольку обнаружение целей возможно только при наличии прямой видимости, то, зная высоту установки антенны радара и ориентировочно высоту цели, можно определить предельную дальность обнаружения в километрах, пользуясь известным выражением:

где h1 и h2 – высота установки антенны и высота цели над уровнем моря в метрах.
Обычно в паспортных данных приводят максимальную (инструментальную) дальность, составляющую для большинства компактных яхтенных радаров 16–36 морских миль.
В реальных условиях радиолокационное наблюдение ведется, как правило, на меньших расстояниях, определяемых потребностями судовождения. В этих случаях использование развертки экрана с максимальной дальностью нецелесообразно, т. к., это приводит к существенной перегруженности экрана и к уменьшению размеров цели, что затрудняет ее обнаружение. Поэтому, в радарах существует несколько так называемых шкал дальности – значений, в пределах которых может работать радар. Ниже приведен набор шкал дальности одного портативного радиолокатора:
0,125 0,25 0,5 0,75 1,5 3,0 6,0 12 16
Такое большое количество шкал позволяет получать общее представление об окружающем пространстве на больших расстояниях и получать детальное радиолокационное изображение на дальностях, наиболее важных для обеспечения безопасности плавания. Кроме того, в некоторых радарах имеется возможность выделения и просмотра в укрупненном масштабе отдельных участков окружающего пространства.
Ошибки определения координат цели
Для любого навигационного прибора, определяющего местоположение, важнейшим показателем является ошибка определения местоположения. Судовой радар определяет две координаты цели – дальность относительно антенны и направление (азимут) относительно линии направления (истинного, магнитного, направления движения). Ошибка определения расстояния портативных радаров обычно составляет (0,9–1)% от максимального значения используемой шкалы дальности, ошибка определения направления – ±1°.
Скорость вращения антенны
Этот параметр определяет скорость обновления информации на экране радара и особенно важен при управлении скоростными судами. Скорости вращения антенн портативных радаров достаточно высокие – в зависимости от модели от 24 до 36 об/мин, что позволяет использовать их на всех доступных скоростях передвижения по воде.
Функциональные возможности Функциональные возможности радаров определяют удобство работы с прибором и способность получения той или иной информации. Для понимания того, что может современный радар, вспомним его основные функции.
Обнаружение целей
Обнаружение любых объектов осуществляется визуально на экране локатора. Небольшие объекты – суда, буи, островки – отображаются в виде ярких точек на фоне различных помех – от собственных шумов приемника, отражений от волн и атмосферных осадков, маскирующих отметки от целей. Поэтому, обнаружение целей является процессом выделения их отметок из помех.
Определение координат целей Как уже отмечалось выше, судовой радиолокатор определяет две координаты в своей местной системе – дальность относительно судна и азимут относительно диаметральной плоскости судна или направления на север.
Измерение дальности
Дальность до цели может осуществляться тремя способами – с помощью колец дальности, с помощью курсора и с помощью маркера переменного расстояния VRM.
Если посмотреть на экран радара, первое, что бросается в глаза – это находящиеся на нем концентрические кольца (рис. 3). Количество колец и расстояния между ними жестко связаны с используемыми шкалами дальности. Если, например, используется шкала дальности 16 миль, а на экране 8 колец, то понятно, что интервал между кольцами составляет 2 мили. Для измерения расстояния до цели достаточно подсчитать количество колец между ее отметкой и центром экрана, умножить это число на расстояние между кольцами и прибавить оцененное на глаз приблизительное расстояние отметки от внутренней кромки ближайшего по направлению к центру кольца. Понятно, что такой способ дает наглядную и быструю, но весьма грубую оценку, поэтому для получения точных значений используют два других способа.

Рис. 3. Измерение дальности на экране радара
Для точных измерений может быть использован курсор и подвижный маркер расстояний VRM. Курсор – это отметка на экране в виде перекрестия, управляемая с помощью клавиш или трэкбола. Чтобы измерить дальность до цели, достаточно поместить перекрестие на внутреннюю кромку отметки, после чего искомое значение дальности вместе со значением азимута высветится в специальном окне в углу экрана.
Маркер расстояний – это кольцо на экране, радиус которого может выбираться оператором. Изменяя величину радиуса, Оператор совмещает кольцо с внутренней границей отметки цели – и вы получите значение расстояния до цели, высвеченное в углу экрана.
Измерение направления
Направление отсчитывается от курсовой линии – вертикальной линии на экране, совпадающей с диаметральной плоскостью судна. При наличии сопряженных с радаром магнитного компаса или гирокомпаса, отсчет азимута может осуществляться от магнитного или истинного направления на Север.
Измерение направления может осуществляться по положению цели на градусной сетке, с помощью курсора (аналогично показанному выше измерению дальности) либо с использованием линии электронного маркера пеленга EBL.
Первый способ дает большие ошибки измерения направления на цель и используется при судовождении для грубой оценки положения судна относительно цели.
Определение координат
Масштабирование
В современных радарах имеется возможность выделения отдельных участков и просмотра их в увеличенном масштабе на экране одновременно с наблюдением общего радиолокационного изображения. Для этого курсором выделяют диапазоны детального просмотра по дальности и азимуту и включают режим масштабирования.
Автоматическое сопровождение целей
При расхождении в условиях плохой видимости с одним судном с использованием радара задача решается довольно просто. Однако, в районах с интенсивным судоходством, когда на экране присутствует много отметок от движущихся и неподвижных целей, задача становится трудновыполнимой для судоводителя и светлое время суток.
Распознавание целей осуществляется путем анализа изменения их положения за определенное время, точнее, за определенное количество обзоров и привязки их к своим трассам движения. Выделенным целям автоматически присваиваются номера, которые выводят на экран вместе с целями, их траекториями и векторами скорости.
Многооконный режим
Помимо решения основных задач – обнаружения и определения координат целей – современные радиолокаторы обладают набором функций, существенно расширяющих их возможности.
Интерфейс
В прилагаемой ниже таблице приведены основные характеристики некоторых наиболее распространенных портативных радиолокаторов.


Интегральные навигационные системы
Последним достижением судовой радиоэлектроники стало создание интегральных навигационных систем. Такие системы объединяют в себе функции нескольких различных приборов. Ранее уже упоминалось о эхолотах-приемниках GPS, об эхолотах-картплоттерах.
Последние разработки ряда производителей позволили объединить в одном приборе практически все судовые навигационные устройства – радар, картплоттер, эхолот, приемник навигационных и метеоданных и факс для приема метеокарт. Такие системы обычно включают основной блок – многофункциональный дисплей и набор опций. Такое построение позволяют создавать разные конфигурации систем в соответствии с потребностями (а также возможностями) владельца. Так, добавление к дисплею радиолокационного сканера превращает его в радар, добавление приемника GPS – в картплоттер, приемопередатчика и гидроакустического преобразователя – в рыбопоисковый или в навигационный эхолот (рис. 4).

Рис. 4. Простейшая конфигурация интегральной системы
Все составляющие системы работают на один экран, при этом на нем может создаваться только одно изображение – радиолокационное, карта, подводное пространство, либо отображаться одновременно в многооконном режиме в различных комбинациях – радар, эхолот, картплоттер-эхолот, радар-картплоттер, причем, радиолокационное и карта могут отображаться раздельно или с наложением друг на друга.
Читайте также: