
Чему равна работа совершаемая упругой силой гравитационной силой кратко
Обновлено: 05.07.2024
Для характеристики различных форм движения материи вводятся соответствующие виды энергии, например: механическая, внутренняя, энергия электростатических, внутриядерных взаимодействий и др.
Энергия подчиняется закону сохранения, который является одним из важнейших законов природы.
Механическая энергия Е характеризует движение и взаимодействие тел и является функцией скоростей и взаимного расположения тел. Она равна сумме кинетической и потенциальной энергий.
Кинетическая энергия
Рассмотрим случай, когда на тело массой m действует постоянная сила \(~\vec F\) (она может быть равнодействующей нескольких сил) и векторы силы \(~\vec F\) и перемещения \(~\vec s\) направлены вдоль одной прямой в одну сторону. В этом случае работу силы можно определить как A = F∙s. Модуль силы по второму закону Ньютона равен F = m∙a, а модуль перемещения s при равноускоренном прямолинейном движении связан с модулями начальной υ1 и конечной υ2 скорости и ускорения а выражением \(~s = \frac<\upsilon^2_2 - \upsilon^2_1>\) .
Отсюда для работы получаем
Физическая величина, равная половине произведения массы тела на квадрат его скорости, называется кинетической энергией тела.
Кинетическая энергия обозначается буквой Ek.
Тогда равенство (1) можно записать в таком виде:
Теорема о кинетической энергии
работа равнодействующей сил, приложенных к телу, равна изменению кинетической энергии тела.
Так как изменение кинетической энергии равно работе силы (3), кинетическая энергия тела выражается в тех же единицах, что и работа, т. е. в джоулях.
Если начальная скорость движения тела массой m равна нулю и тело увеличивает свою скорость до значения υ, то работа силы равна конечному значению кинетической энергии тела:
Физический смысл кинетической энергии
кинетическая энергия тела, движущегося со скоростью υ, показывает, какую работу должна совершить сила, действующая на покоящееся тело, чтобы сообщить ему эту скорость.
Потенциальная энергия
Потенциальная энергия – это энергия взаимодействия тел.
Потенциальная энергия поднятого над Землей тела – это энергия взаимодействия тела и Земли гравитационными силами. Потенциальная энергия упруго деформированного тела – это энергия взаимодействия отдельных частей тела между собой силами упругости.
Потенциальными называются силы, работа которых зависит только от начального и конечного положения движущейся материальной точки или тела и не зависит от формы траектории.
При замкнутой траектории работа потенциальной силы всегда равна нулю. К потенциальным силам относятся силы тяготения, силы упругости, электростатические силы и некоторые другие.
Силы, работа которых зависит от формы траектории, называются непотенциальными. При перемещении материальной точки или тела по замкнутой траектории работа непотенциальной силы не равна нулю.
Потенциальная энергия взаимодействия тела с Землей
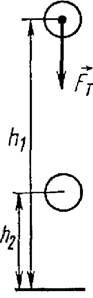
Найдем работу, совершаемую силой тяжести Fт при перемещении тела массой m вертикально вниз с высоты h1 над поверхностью Земли до высоты h2 (рис. 1). Если разность h1 – h2 пренебрежимо мала по сравнению с расстоянием до центра Земли, то силу тяжести Fт во время движения тела можно считать постоянной и равной mg.
Так как перемещение совпадает по направлению с вектором силы тяжести, работа силы тяжести равна
\(~A = F \cdot s = m \cdot g \cdot (h_1 - h_2)\) . (5)
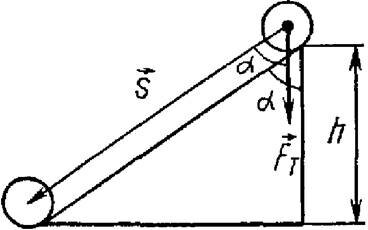
Рассмотрим теперь движение тела по наклонной плоскости. При перемещении тела вниз по наклонной плоскости (рис. 2) сила тяжести Fт = m∙g совершает работу
\(~A = m \cdot g \cdot s \cdot \cos \alpha = m \cdot g \cdot h\) , (6)
где h – высота наклонной плоскости, s – модуль перемещения, равный длине наклонной плоскости.
Движение тела из точки В в точку С по любой траектории (рис. 3) можно мысленно представить состоящим из перемещений по участкам наклонных плоскостей с различными высотами h’, h’’ и т. д. Работа А силы тяжести на всем пути из В в С равна сумме работ на отдельных участках пути:
\(~A = m \cdot g \cdot h' + m \cdot g \cdot h'' + \ldots + m \cdot g \cdot h^n = m \cdot g \cdot (h' + h'' + \ldots + h^n) = m \cdot g \cdot (h_1 - h_2)\) , (7)
где h1 и h2 – высоты от поверхности Земли, на которых расположены соответственно точки В и С.
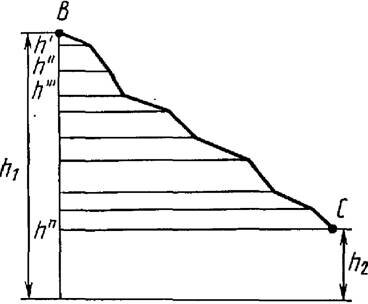
Равенство (7) показывает, что работа силы тяжести не зависит от траектории движения тела и всегда равна произведению модуля силы тяжести на разность высот в начальном и конечном положениях.
При движении вниз работа силы тяжести положительна, при движении вверх – отрицательна. Работа силы тяжести на замкнутой траектории равна нулю.
Равенство (7) можно представить в таком виде:
\(~A = - (m \cdot g \cdot h_2 - m \cdot g \cdot h_1)\) . (8)
Физическую величину, равную произведению массы тела на модуль ускорения свободного падения и на высоту, на которую поднято тело над поверхностью Земли, называют потенциальной энергией взаимодействия тела и Земли.
Работа силы тяжести при перемещении тела массой m из точки, расположенной на высоте h2, в точку, расположенную на высоте h1 от поверхности Земли, по любой траектории равна изменению потенциальной энергии взаимодействия тела и Земли, взятому с противоположным знаком.
Потенциальная энергия обозначается буквой Еp.
Значение потенциальной энергии тела, поднятого над Землей, зависит от выбора нулевого уровня, т. е. высоты, на которой потенциальная энергия принимается равной нулю. Обычно принимают, что потенциальная энергия тела на поверхности Земли равна нулю.
При таком выборе нулевого уровня потенциальная энергия Еp тела, находящегося на высоте h над поверхностью Земли, равна произведению массы m тела на модуль ускорения свободного падения g и расстояние h его от поверхности Земли:
\(~E_p = m \cdot g \cdot h\) . (10)
Физический смысл потенциальной энергии взаимодействия тела с Землей
потенциальная энергия тела, на которое действует сила тяжести, равна работе, совершаемой силой тяжести при перемещении тела на нулевой уровень.
В отличие от кинетической энергии поступательного движения, которая может иметь лишь положительные значения, потенциальная энергия тела может быть как положительной, так и отрицательной. Тело массой m, находящееся на высоте h, где h \(~E_p = -m \cdot g \cdot h\) .
Потенциальная энергия гравитационного взаимодействия
Потенциальная энергия гравитационного взаимодействия системы двух материальных точек с массами m и М, находящихся на расстоянии r одна от другой, равна
где G – гравитационная постоянная, а нуль отсчета потенциальной энергии (Еp = 0) принят при r = ∞.
Потенциальная энергия гравитационного взаимодействия тела массой m с Землей, где h – высота тела над поверхностью Земли, Me – масса Земли, Re – радиус Земли, а нуль отсчета потенциальной энергии выбран при h = 0.
При том же условии выбора нуля отсчета потенциальная энергия гравитационного взаимодействия тела массой m с Землей для малых высот h (h « Re) равна
\(~E_p = m \cdot g \cdot h\) ,
где \(~g = G \cdot \frac\) – модуль ускорения свободного падения вблизи поверхности Земли.
Потенциальная энергия упруго деформированного тела
Вычислим работу, совершаемую силой упругости при изменении деформации (удлинения) пружины от некоторого начального значения x1 до конечного значения x2 (рис. 4, б, в).
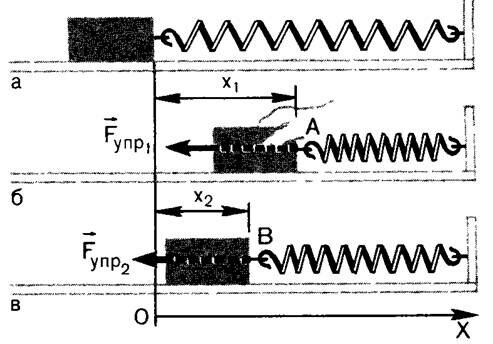
Сила упругости изменяется в процессе деформации пружины. Для нахождения работы силы упругости можно взять среднее значение модуля силы (т.к. сила упругости линейно зависит от x) и умножить на модуль перемещения:
\(~A = F_ \cdot (x_1 - x_2)\) , (13)
Физическая величина, равная половине произведения жесткости тела на квадрат его деформации, называется потенциальной энергией упруго деформированного тела:
Из формул (14) и (15) следует, что работа силы упругости равна изменению потенциальной энергии упруго деформированного тела, взятому с противоположным знаком:
Если x2 = 0 и x1 = х, то, как видно из формул (14) и (15),
Физический смысл потенциальной энергии деформированного тела
потенциальная энергия упруго деформированного тела равна работе, которую совершает сила упругости при переходе тела в состояние, в котором деформация равна нулю.
Закон сохранения энергии в механических процессах
Потенциальная энергия характеризует взаимодействующие тела, а кинетическая энергия – движущиеся тела. И потенциальная, и кинетическая энергия изменяются только в результате такого взаимодействия тел, при котором действующие на тела силы совершают работу, отличную от нуля. Рассмотрим вопрос об изменениях энергии при взаимодействиях тел, образующих замкнутую систему.
Замкнутая система – это система, на которую не действуют внешние силы или действие этих сил скомпенсировано. Если несколько тел взаимодействуют между собой только силами тяготения и силами упругости и никакие внешние силы на них не действуют, то при любых взаимодействиях тел работа сил упругости или сил тяготения равна изменению потенциальной энергии тел, взятому с противоположным знаком:
По теореме о кинетической энергии, работа тех же сил равна изменению кинетической энергии:
Из сравнения равенств (17) и (18) видно, что изменение кинетической энергии тел в замкнутой системе равно по абсолютному значению изменению потенциальной энергии системы тел и противоположно ему по знаку:
Закон сохранения энергии в механических процессах:
сумма кинетической и потенциальной энергии тел, составляющих замкнутую систему и взаимодействующих между собой силами тяготения и си-лами упругости, остается постоянной.
Сумма кинетической и потенциальной энергии тел называется полной механической энергией.
Основное содержание закона сохранения энергии заключается не только в установлении факта сохранения полной механической энергии, но и в установлении возможности взаимных превращений кинетической и потенциальной энергии тел в равной количественной мере при взаимодействии тел.
Приведем простейший опыт. Подбросим вверх стальной шарик. Сообщив начальную скорость υнач, мы придадим ему кинетическую энергию, из-за чего он начнет подниматься вверх. Действие силы тяжести приводит к уменьшению скорости шарика, а значит, и его кинетической энергии. Но шарик поднимается выше и выше и приобретает все больше и больше потенциальной энергии (Еp = m∙g∙h). Таким образом, кинетическая энергия не исчезает бесследно, а происходит ее превращение в потенциальную энергию.
В момент достижения верхней точки траектории (υ = 0) шарик полностью лишается кинетической энергии (Еk = 0), но при этом его потенциальная энергия становится максимальной. Дальше шарик меняет направление движения и с увеличивающейся скоростью движется вниз. Теперь происходит обратное превращение потенциальной энергии в кинетическую.
Закон сохранения энергии раскрывает физический смысл понятия работы:
работа сил тяготения и сил упругости, с одной стороны, равна увеличению кинетической энергии, а с другой стороны, – уменьшению потенциальной энергии тел. Следовательно, работа равна энергии, превратившейся из одного вида в другой.
Закон об изменении механической энергии
Если система взаимодействующих тел не замкнута, то ее механическая энергия не сохраняется. Изменение механической энергии такой системы равно работе внешних сил:
\(~A_ = \Delta E = E - E_0\) . (20)
где Е и Е0 – полные механические энергии системы в конечном и начальном состояниях соответственно.
Примером такой системы может служить система, в которой наряду с потенциальными силами действуют непотенциальные силы. К непотенциальным силам относятся силы трения. В большинстве случаев, когда угол между силой трения Ftr и элементарным перемещением Δr тела составляет π радиан, работа силы трения отрицательна и равна
где s12 – путь тела между точками 1 и 2.
Силы трения при движении системы уменьшают ее кинетическую энергию. В результате этого механическая энергия замкнутой неконсервативной системы всегда уменьшается, переходя в энергию немеханических форм движения.
Например, автомобиль, двигавшийся по горизонтальному участку дороги, после выключения двигателя проходит некоторый путь и под действием сил трения останавливается. Кинетическая энергия поступательного движения автомобиля стала равной нулю, а потенциальная энергия не увеличилась. Во время торможения автомобиля произошло нагревание тормозных колодок, шин автомобиля и асфальта. Следовательно, в результате действия сил трения кинетическая энергия автомобиля не исчезла, а превратилась во внутреннюю энергию теплового движения молекул.
Закон сохранения и превращения энергии
при любых физических взаимодействиях энергия превращается из одной формы в другую.
Иногда угол между силой трения Ftr и элементарным перемещением Δr равен нулю и работа силы трения положительна:
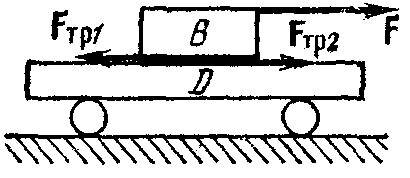
Пример 1. Пусть, внешняя сила F действует на брусок В, который может скользить по тележке D (рис. 5). Если тележка перемещается вправо, то работа силы трения скольжения Ftr2, действующей на тележку со стороны бруска, положительна:
Пример 2. При качении колеса его сила трения качения направлена вдоль движения, так как точка соприкосновения колеса с горизонтальной поверхностью двигается в направлении, противоположном направлению движения колеса, и работа силы трения положительна (рис. 6):
В повседневной жизни часто приходится встречаться с таким понятием как работа. Что это слово означает в физике и как определить работу силы упругости? Ответы на эти вопросы вы узнаете в статье.
Механическая работа
Работа – это скалярная алгебраическая величина, которая характеризует связь между силой и перемещением. При совпадении направления этих двух переменных она вычисляется по следующей формуле:
A=FS
- F – модуль вектора силы, которая совершает работу;
- S – модуль вектора перемещения.
Не всегда сила, которая действует на тело, совершает работу. Например, работа силы тяжести равна нулю, если ее направление перпендикулярно перемещению тела.
Если вектор силы образует отличный от нуля угол с вектором перемещения, то для определения работы следует воспользоваться другой формулой:
A=FScosα
α – угол между векторами силы и перемещения.
Значит, механическая работа – это произведение проекции силы на направление перемещения и модуля перемещения, или произведение проекции перемещения на направление силы и модуля этой силы.
Знак механической работы
В зависимости от направления силы относительно перемещения тела работа A может быть:
-
положительной(0°≤ α 0, то скорость тела увеличивается. Пример – падение яблока с дерева на землю. При A
Единица измерения работы в СИ (Международной системе единиц) – Джоуль (1Н*1м=Дж). Джоуль – это работа силы, значение которой равно 1 Ньютону, при перемещении тела на 1 метр в направлении действия силы.
Работа силы упругости
Работу силы можно определить и графическим способом. Для этого вычисляется площадь криволинейной фигуры под графиком Fs(x).
Так, по графику зависимости силы упругости от удлинения пружины, можно вывести формулу работы силы упругости.
A=kx 2 /2
Что мы узнали?
Механическая работа совершается при действии на тело силы, которая приводит к перемещению тела. В зависимости от угла, который возникает между силой и перемещением, работа может быть равна нулю или иметь отрицательный или положительный знак. На примере силы упругости вы узнали о графическом способе определения работы.
В чём выражается гравитационное взаимодействие тел?
Как доказать наличие взаимодействия Земли и, например, учебника физики?
Как известно, сила тяжести — консервативная сила. Теперь найдём выражение для работы силы тяготения и докажем, что работа этой силы не зависит от формы траектории, т. е. что сила тяготения также консервативная сила.
Напомним, что работа консервативной силы по замкнутому контуру равна нулю.
Пусть тело массой m находится в поле тяготения Земли. Очевидно, что размеры этого тела малы по сравнению с размерами Земли, поэтому его можно считать материальной точкой. На тело действует сила тяготения

где G — гравитационная постоянная,
М — масса Земли,
r — расстояние, на котором находится тело от центра Земли.

Пусть тело перемещается из положения А в положение В по разным траекториям: 1) по прямой АВ; 2) по кривой АА'В'В; 3) по кривой АСВ (рис. 5.15)
1. Рассмотрим первый случай. Сила тяготения, действующая на тело, непрерывно уменьшается, поэтому рассмотрим работу этой силы на малом перемещении Δri = ri + 1 — ri. Среднее значение силы тяготения равно:

Чем меньше Δri, тем более справедливо написанное выражение r 2 сpi = riri + 1.

Тогда работу силы Fсpi, на малом перемещении Δri, можно записать в виде

Суммарная работа силы тяготения при перемещении тела из точки А в точку В равна:

2. При движении тела по траектории АА'В'В (см. рис. 5.15) очевидно, что работа силы тяготения на участках АА' и В'В равна нулю, так как сила тяготения направлена к точке О и перпендикулярна любому малому перемещению по дуге окружности. Следовательно, работа будет также определяться выражением (5.31).
3. Определим работу силы тяготения при движении тела от точки А к точке В по траектории АСВ (см. рис. 5.15). Работа силы тяготения на малом перемещении Δsi равна ΔАi = FсрiΔsicosαi.
Из рисунка видно, что Δsicosαi = - Δri, и суммарная работа опять же будет определяться по формуле (5.31).
Итак, можно сделать вывод, что А1 = А2 = А3, т. е. что работа силы тяготения не зависит от формы траектории. Очевидно, что работа силы тяготения при перемещении тела по замкнутой траектории АА'В'ВА равна нулю.
Сила тяготения — консервативная сила.
Изменение потенциальной энергии равно работе силы тяготения, взятой с обратным знаком:

Если выбрать нулевой уровень потенциальной энергии на бесконечности, т. е. ЕпВ = 0 при rВ → ∞, то следовательно,
Потенциальная энергия тела массой m, находящегося на расстоянии r от центра Земли, равна:

Закон сохранения энергии для тела массой m, движущегося в поле тяготения, имеет вид

где υ1 — скорость тела на расстоянии r1 от центра Земли, υ2 — скорость тела на расстоянии r2 от центра Земли.
Определим, какую минимальную скорость надо сообщить телу вблизи поверхности Земли, чтобы оно в отсутствие сопротивления воздуха могло удалиться от неё за пределы сил земного притяжения.
Минимальную скорость, при которой тело в отсутствие сопротивления воздуха может удалиться за пределы сил земного притяжения, называют второй космической скоростью для Земли.
На тело со стороны Земли действует сила тяготения, которая зависит от расстояния центра масс этого тела до центра масс Земли. Поскольку неконсервативных сил нет, полная механическая энергия тела сохраняется. Внутренняя потенциальная энергия тела остаётся постоянной, так как оно не деформируется. Согласно закону сохранения механической энергии

На поверхности Земли тело обладает и кинетической, и потенциальной энергией:

где υII — вторая космическая скорость, М3 и Я3 — соответственно масса и радиус Земли.
В бесконечно удаленной точке, т. е. при r → ∞, потенциальная энергия тела равна нулю (Wп = 0), а так как нас интересует минимальная скорость, то и кинетическая энергия также должна быть равна нулю: Wк = 0.
Из закона сохранения энергии следует:



Эту скорость можно выразить через ускорение свободного падения вблизи поверхности Земли (при расчётах, как правило, этим выражением пользоваться удобнее). Поскольку то GM3 = gR 2 3.
Следовательно, искомая скорость


Точно такую же скорость приобрело бы тело, упавшее на Землю с бесконечно большой высоты, если бы не было сопротивления воздуха. Заметим, что вторая космическая скорость в раза больше, чем первая.
Законы сохранения в механике - Физика, учебник для 10 класса - Класс!ная физика
Работа силы тяжести.При вычислении работы силы тяжести мы рассматриваем ограниченную область пространства вблизи поверхности Земли, размеры которой малы по сравнению с размерами Земли. Направим ось z вертикально вверх. Точка M с массой m перемещается по некоторой траектории из положения в положение (Рис.5.2). Проекции силы тяжести на оси координат равны: где g – ускорение свободного падения.
Вычислим работу силы тяжести:


Сила тяжести – потенциальная сила. Ее работа не зависит от траектории точки, а определяется перепадом высот между начальным и конечным положениями точки, будучи равной убыли потенциальной энергии материального тела.

Таким образом,
Работа силы тяжести положительна, если точка теряет высоту (опускается) и отрицательна, если точка набирает высоту.
Работа упругой силы. Понятие упругой силы обычно ассоциируется с реакцией линейно–упругой пружины. Направим ось x вдоль пружины в сторону ее растяжения. Под понимаем удлинение пружины ( – длина нерастянутой пружины).
 |
| Рис. 5.3 |
Сила реакции пружины пропорциональна ее удлинению где c – коэффициент жесткости пружины. Разложим вектор скорости точки M на две составляющие, одна из которых направлена вдоль пружины и определяет скорость ее растяжения, а вторая перпендикулярна пружине и определяет скорость точки M, полученную при повороте пружины без изменения ее длины (Рис. 5.3).
Вычислим мощность упругой силы:
т.к.
Работа упругой силы при перемещении конца пружины из в оказывается равной

Как видно, упругая сила потенциальна. Потенциальная энергия тела Ь равна . Заметим, что если поворачивать пружину вокруг шарнира O, не изменяя ее длины, то упругая сила не совершает работу.
Работа вращающего момента Пусть сила приложена в некоторой точке тела, имеющего ось вращения. Тело вращается с угловой скоростью . Вычислим мощность и работу силы. Точка приложения силы описывает окружность. Разложим силу на составляющие по осям естественного трехгранника (Рис. 5.4):
Работу будет совершать только составляющая , направленная по касательной к траектории точки M:
где – момент силы относительно оси вращения тела.
32. Теорема об изменении кинетической энергии механической системы.
Умножим каждое из дифференциальных уравнений движения точек механической системы скалярно на скорость соответствующей точки и сложим все полученные уравнения:
или
Учитывая определения кинетической энергии механической системы и мощности силы, получаем:

(5.6)
Доказана теорема об изменении кинетической энергии механической системы в дифференциальной форме:
производная по времени от кинетической энергии механической системы равна сумме мощностей всех приложенных к системе внешних и внутренних сил.
Читайте также:
- Синергетика как общая теория самоорганизации история создания кратко
- О каких человеческих качествах бориса годунова говорит его современник кратко
- Какие журналы должны быть при проверки роспотребнадзора по уборке школа
- Циклограмма игровой деятельности в доу по фгос
- Труд как средство подготовки к школе