
Реферат на тему синхронные шаговые двигатели
Обновлено: 04.07.2024
Шаговый электродвигатель - это вращающийся электродвигатель с дискретными угловыми перемещениями ротора, осуществляемыми за счет импульсов сигнала управления [1].
Предшественником шагового двигателя является серводвигатель.
Шаговые (импульсные) двигатели непосредственно преобразуют управляющий сигнал в виде последовательности импульсов в пропорциональный числу импульсов и фиксированный угол поворота вала или линейное перемещение механизма без датчика обратной связи. Это обстоятельство упрощает систему привода и заменяет замкнутую систему следящего привода (сервопривода) разомкнутой, обладающей такими преимуществами, как снижение стоимости устройства (меньше элементов) и увеличение точности в связи с фиксацией ротора шагового двигателя при отсутствии импульсов сигнала.
Очевиден и недостаток привода с шаговым двигателем: при сбое импульса дальнейшее слежение происходит с ошибкой в угле, пропорциональной числу пропущенных импульсов [2].
Поэтому в задачах, где требуются высокие характеристики (точность, быстродействие) используются серводвигатели. В остальных же случаях из-за более низкой стоимости, простого управления и неплохой точности обычно используются шаговые двигатели.
Конструкция шагового электродвигателя
Шаговый двигатель, как и любой вращающийся электродвигатель, состоит из ротора и статора. Статор - неподвижная часть, ротор - вращающаяся часть.

Шаговые двигатели надежны и недороги, так как ротор не имеет контактных колец и коллектора. Ротор имеет либо явно выраженные полюса, либо тонкие зубья. Реактивный шаговый двигатель - имеет ротор из магнитомягкого материала с явно выраженными полюсами. Шаговый двигатель с постоянными магнитами имеет ротор на постоянных магнитах. Гибридный шаговый двигатель имеет составной ротор включающий полюсные наконечники (зубья) из магнитомягкого материала и постоянные магниты. Определить имеет ротор постоянные магниты или нет можно посредством вращения обесточенного двигателя, если при вращении имеется фиксирующий момент и/или пульсации значит ротор выполнен на постоянных магнитах.
Статор шагового двигателя имеет сердечник с явно выраженными полюсами, который обычно делается из ламинированных штампованных листов электротехнической стали для уменьшения вихревых токов и уменьшения нагрева. Статор шагового двигателя обычно имеет от двух до пяти фаз.
Характеристики
Так как шаговый двигатель не предназначен для непрерывного вращения в его параметрах не указывают мощность. Шаговый двигатель - маломощный двигатель по сравнению с другими электродвигателями.
Одним из определяющих параметров шагового двигателя является шаг ротора, то есть угол поворота ротора, соответствующий одному импульсу. Шаговый двигатель делает один шаг в единицу времени в момент изменения импульсов управления. Величина шага зависит от конструкции двигателя: количества обмоток, полюсов и зубьев. В зависимости от конструкции двигателя величина шага может меняться в диапазоне от 90 до 0,75 градусов. С помощью системы управления можно еще добиться уменьшения шага пополам используя соответствующий метод управления.
Типы шаговых двигателей
-
По конструкции ротора выделяют три типа шаговых двигателей: ; ; .
Реактивный шаговый двигатель
Реактивный шаговый двигатель - синхронный реактивный двигатель. Статор реактивного шагового двигателя обычно имеет шесть явновыраженных полюсов и три фазы (по два полюса на фазу), ротор - четыре явно выраженных полюса, при такой конструкции двигателя шаг равен 30 градусам. В отличии от других шаговых двигателей выключенный реактивный шаговый двигатель не имеет фиксирующего (тормозящего) момента при вращении вала.
Это позволяет применять его там, где требуется высокая точность перемещений. Наглядные примеры это принтеры, факсы, копировальные машины, станки с ЧПУ (Числовое программное управление), фрезерные, гравировальные машины, модули линейного перемещения, плоттеры, установщики радиоэлектронных компонентов. Шаговый двигатель является бесколлекторным двигателем постоянного тока. Как и другие бесколлекторные двигатели, шаговый двигатель высоконадежен и при надлежащей эксплуатации имеет длительный срок службы.
Содержание
ВВЕДЕНИЕ
УПРАВЛЕНИЯ ШАГОВЫМИ ДВИГАТЕЛЯМИ
ПРИМЕНЕНИЕ
ШАГОВЫЕ ДВИГАТЕЛИ И ИХ ДОСТОИНСТВА.
ВЫБОР ДВИГАТЕЛЯ.
ЗАКЛЮЧЕНИЕ
Вложенные файлы: 1 файл
АВТОМАТИЗАЦИЯ РЕФЕРАТ.docx
Министерство образования и науки РФ
ФГБОУ ВПО «Владимирский государственный университет
Кафедра автоматизации технологических процессов
- ВВЕДЕНИЕ
- УПРАВЛЕНИЯ ШАГОВЫМИ ДВИГАТЕЛЯМИ
- ПРИМЕНЕНИЕ
- ШАГОВЫЕ ДВИГАТЕЛИ И ИХ ДОСТОИНСТВА.
- ВЫБОР ДВИГАТЕЛЯ.
- ЗАКЛЮЧЕНИЕ
Шаговые двигатели - это устройства, задача которых преобразование электрических импульсов в поворот вала двигателя на определенный угол. В отличие от обычных двигателей, шаговые двигатели имеют особенности, которые определяют их свойства при использовании в специализированных областях: управляя шаговым двигателем с помощью специального устройства (драйвер шагового двигателя), можно поворачивать его вал на строго заданный угол. Это позволяет применять его там, где требуется высокая точность перемещений. Наглядные примеры это принтеры, факсы, копировальные машины, станки с ЧПУ (Числовое программное управление), фрезерные, гравировальные машины, модули линейного перемещения, плоттеры, установщики радиоэлектронных компонентов. Шаговый двигатель является бесколлекторным двигателем постоянного тока. Как и другие бесколлекторные двигатели, шаговый двигатель высоконадежен и при надлежащей эксплуатации имеет длительный срок службы.
Шаговые электродвигатели очень удобны для применения в приводах роботов, промышленности и в специальных оборудованиях, например, в принтерах, дисководах, факсах, сканерах плоттерах и других оборудованиях.поскольку не требуют датчиков обратной связи для определения положений звеньев. Такие двигатели позволяют с высокой точностью преобразовывать цифровые электрические сигналы непосредственно в дискретные угловые перемещения (шаги) ротора.
По принципу действия шаговый двигатель относится к двигателям синхронного типа: в нем существует связь между сигналом питания и положением ротора. Благодаря периодическим переключениям обмоток статора, его магнитодвижущее поле, поворачиваясь на определенный угол (шаг), производит поворот на такой же определенный угол ротора двигателя, представляющего собой постоянный магнит либо переменное магнитное сопротивление.
УПРАВЛЕНИЯ ШАГОВЫМИ ДВИГАТЕЛЯМИ
В системах управления электроприводами для отработки заданного угла или перемещения используют датчики обратной связи по углу или положению выходного вала исполнительного двигателя
Система отработки угла выходного вала двигателя с использованием датчика обратной связи.
Если в качестве исполнительного двигателя использовать синхронный шаговый двигатель, то можно обойтись без датчика обратной связи (Дт) и упростить систему управления двигателем (СУ), так как отпадает необходимость использования в ней цифро-аналоговых (ЦАП) и аналого-цифровых (АЦП) преобразователей.
Шаговыми двигателями называются синхронные двигатели, преобразующие команду, заданную в виде импульсов, в фиксированный угол поворота двигателя или в фиксированное положение подвижной части двигателя без датчиков обратной связи.
Мощность шаговых двигателей лежит в диапазоне от единиц ватт до одного киловатта.
Шаговый двигатель имеет не менее двух положений устойчивого равновесия ротора в пределах одного оборота.
Напряжение питания обмоток управления шагового двигателя представляет собой последовательность однополярных или двуполярных прямоугольных импульсов, поступающих от электронного коммутатора (К). Результирующий угол соответствует числу переключений коммутатора, а частота вращения двигателя соответствует частоте переключений электронного коммутатора.
Шаговые двигатели различаются по конструктивным группам: активного типа (с постоянными магнитами), реактивного типа и индукторные.
Шаговые синхронные двигатели активного типа. В отличие от синхронных машин непрерывного вращения шаговые двигатели имеют на статоре явно выраженные полюса, на которых расположены катушки обмоток управления.
Принцип действия шагового двигателя активного типа рассмотрим на примере двухфазного двигателя
Принципиальная схема управления шаговым двигателем
Различают два вида коммутации обмотки шагового двигателя: симметричная и несимметричная.
При симметричной системе коммутации на всех четырех тактах возбуждается одинаковое число обмоток управления
Симметричная система коммутации
При несимметричной системе коммутации четным и нечетным тактам соответствует различное число возбужденных обмоток управления
Несимметричная система коммутации
Ротор у шагового двигателя активного типа представляет собой постоянный магнит, при числе пар полюсов больше 1, выполненный в виде "звездочки" .
Число тактов КТ системы управления называют количеством состояний коммутатора на периоде его работы T. Как видно из рисунков для симметричной системы управления КТ =4, а для несимметричной КТ =8.
В общем случае число тактов КТ зависит от числа обмоток управления (фаз статора) mу и может быть посчитано по формуле:
n1=1 при симметричной системе коммутации;
n1=2 при несимметричной системе коммутации;
n2=1 при однополярной коммутации;
n2=2 при двуполярной коммутации.
Схемы, иллюстрирующие положения ротора шагового двигателя с постоянными магнитами при подключении к источнику питания одной (а) и двух обмоток (б)
При однополярной коммутации ток в обмотках управления протекает в одном направлении; при двуполярной - в обеих.
Синхронизирующий (электромагнитный) момент машины является результатом взаимодействия потока ротора с дискретно вращающимся магнитным полем статора. Под действием этого момента ротор стремится занять такое положение в пространстве машины, при котором оси потоков ротора и статора совпадают.
Мы рассмотрели шаговые синхронные машины с одной парой полюсов (р=1). Реальные шаговые микродвигатели являются многополюсными (р>1).
Для примера приведем двуполюсный трехфазный шаговый двигатель.
Двигатель с р парами полюсов имеет зубчатый ротор в виде звездочки с равномерно расположенными вдоль окружности 2р постоянными магнитами. Для многополюсной машины величина углового шага ротора равна:
Чем меньше шаг машины, тем точнее (по абсолютной величине) будет отрабатываться угол. Увеличение числа пар полюсов связано с технологическими возможностями и увеличением потока рассеяния. Поэтому р= 4. 6. Обычно величина шага ротора активных шаговых двигателей составляет десятки градусов.
Реактивные шаговые двигатели. У активных шаговых двигателей есть один существенный недостаток: у них крупный шаг, который может достигать десятков градусов.
Реактивные шаговые двигатели позволяют редуцировать частоту вращения ротора. В результате можно получить шаговые двигатели с угловым шагом, составляющим доли градуса.
Отличительной особенностью реактивного редукторного двигателя является расположение зубцов на полюсах статора
Принцип действия реактивного редукторного шагового двигателя: (а) - исходное положение устойчивого равновесия; (б) - положение устойчивого равновесия. cдвинутое на один шаг
Если зубцы ротора соосны с одной диаметрально расположенной парой полюсов статора, то они сдвинуты относительно каждой из оставшихся трех пар полюсов статора соответственно на ј, Ѕ и ѕ зубцового деления.
При большом числе зубцов ротора Zр его угол поворота значительно меньше угла поворота поля статора.
Величина углового шага редукторного реактивного шагового двигателя определится выражением:
В выражении для КТ величину n2 следует брать равной 1, т. к. изменение направления поля не влияет на положение ротора.
Электромагнитный синхронизирующий момент реактивного двигателя обусловлен, как и в случае обычного синхронного двигателя, разной величиной магнитных сопротивлений по продольной и поперечной осям двигателя.
Основным недостатком шагового реактивного двигателя является отсутствие синхронизирующего момента при обесточенных обмотках статора.
Повышение степени редукции шаговых двигателей, как активного типа, так и реактивного, можно достичь применением двух, трех и многопакетных конструкций. Зубцы статора каждого пакета сдвинуты относительно друг друга на часть зубцового деления. Если число пакетов два, то этот сдвиг равен 1/2 зубцового деления, если три, то - 1/3, и т.д. В то же время роторы-звездочки каждого из пакетов не имеют пространственного сдвига, т.е. оси их полюсов полностью совпадают.
Такая конструкция сложнее в изготовлении и дороже однопакетной, и, кроме того, требует сложного коммутатора.
Индукторные (гибридные) шаговые двигатели. Стремление совместить преимущества активного шагового двигателя (большой удельный синхронизирующий момент на единицу объема, наличие фиксирующего момента) и реактивного шагового двигателя (малая величина шага) привело к созданию гибридных индукторных шаговых двигателей.
В настоящее время имеется большое число различных конструкций индукторных двигателей, различающихся числом фаз, размещением обмоток, способом фиксации ротора при обесточенном статоре и т.д. Во всех конструкциях индукторных шаговых двигателей вращающий момент создается за счет взаимодействия магнитного поля, создаваемого обмотками статора и постоянного магнита в зубчатой структуре воздушного зазора. При этом синхронизирующий момент шагового индукторного двигателя по природе является реактивным и создается намагничивающей силой обмоток статора, а постоянный магнит, расположенный либо на статоре, либо на роторе, создает фиксирующий момент, удерживающий ротор двигателя в заданном положении при отсутствии тока в обмотках статора.
По сравнению с шаговым двигателем реактивного типа у индукторного шагового двигателя при одинаковой величине шага больше синхронизирующий момент, лучшие энергетические и динамические характеристики.
Линейные шаговые синхронные двигатели. При автоматизации производственных процессов весьма часто необходимо перемещать объекты в плоскости (например, в графопостроителях современных ЭВМ и т.д.). В этом случае приходится применять преобразователь вращательного движения в поступательное с помощью кинематического механизма.
Линейные шаговые двигатели преобразуют импульсную команду непосредственно в линейное перемещение. Это позволяет упростить кинематическую схему различных электроприводов
Схема, иллюстрирующая работу линейного шагового двигателя
Статор линейного шагового двигателя представляет собой плиту из магнитомягкого материала. Подмагничивание магнитопроводов производится постоянным магнитом.
Зубцовые деления статора и подвижной части двигателя равны. Зубцовые деления в пределах одного магнитопровода ротора сдвинуты на половину зубцового деления t/2. Зубцовые деления второго магнитопровода сдвинуты относительно зубцовых делений первого магнитопровода на четверть зубцового деления t/4. Магнитное сопротивление потоку подмагничивания не зависит от положения подвижной части.
Принцип действия линейного шагового двигателя не отличается от принципа действия индукторного шагового двигателя. Разница лишь в том, что при взаимодействии потока обмоток управления с переменной составляющей потока подмагничивания создается не момент, а сила FС, которая перемещает подвижную часть таким образом, чтобы против зубцов данного магнитопровода находились зубцы статора, т.е. на четверть зубцового деления t/4.
где
KТ - число тактов схемы управления.
Для перемещения объекта в плоскости по двум координатам применяются двухкоординатные линейные шаговые двигатели.
В линейных шаговых двигателях применяют магнито-воздушную подвеску. Ротор притягивается к статору силами магнитного притяжения полюсов ротора. Через специальные форсунки под ротор нагнетается сжатый воздух, что создает силу отталкивания ротора от статора. Таким образом, между статором и ротором создается воздушная подушка, и ротор подвешивается над статором с минимальным воздушным зазором. При этом обеспечивается минимальное сопротивление движению ротора и высокая точность позиционирования.
Режимы работы синхронного шагового двигателя. Шаговый двигатель работает устойчиво, если в процессе отработки угла при подаче на его обмотки управления серии импульсов не происходит потери ни одного шага. Это значит, что в процессе отработки каждого из шагов ротор двигателя занимает устойчивое равновесие по отношению к вектору результирующей магнитной индукции дискретно вращающегося магнитного поля статора.
Режим отработки единичных шагов соответствует частоте импульсов управления, подаваемых на обмотки шагового двигателя, при котором шаговый двигатель отрабатывает до прихода следующего импульса заданный угол вращения. Это значит, что в начале каждого шага угловая скорость вращения двигателя равна 0
Процесс отработки шагов шаговым двигателем
При этом возможны колебания углового вала двигателя относительно установившегося значения. Эти колебания обусловлены запасом кинетической энергии, которая была накоплена валом двигателя при отработке угла. Кинетическая энергия преобразуется в потери: механические, магнитные и электрические. Чем больше величина перечисленных потерь, тем быстрее заканчивается переходный процесс отработки единичного шага двигателем.
В процессе пуска ротор может отставать от потока статора на шаг и более; в результате может быть расхождение между числом шагов ротора и потока статора.
Основными характеристиками шагового двигателя являются: шаг, предельная механическая характеристика и приемистость.
Предельная механическая характеристика- это зависимость максимального синхронизирующего момента от частоты управляющих импульсов
Шаговыми двигателями называются синхронные двигатели, преобразующие команду, заданную в виде импульсов, в фиксированный угол поворота двигателя или в фиксированное положение подвижной части двигателя. Шаговый двигатель имеет не менее двух положений устойчивого равновесия ротора в пределах одного оборота.
В качестве шаговых применяют синхронные двигатели без обмотки возбуждения на роторе: с постоянными магнитами, реактивные и индукторные (с подмагничиванием). Для получения требуемых статических характеристик и динамических свойств их выполняют без пусковой обмотки, с ротором минимального диаметра и рассчитывают на большие электромагнитные нагрузки.
Шаговые двигатели целесообразно применять для привода механизмов, имеющих старт-стопное движение, или механизмов, с непрерывным движением, если управляющий сигнал задан в виде последовательности импульсов, например, лентопротяжных устройств для ввода и вывода информации, счетчиков, приводов станков с программным управлением и т. д.
Мощность выпускаемых шаговых двигателей лежит в диапазоне от единиц ватт до одного киловатта.
Напряжение питания обмоток управления шагового двигателя представляет собой последовательность однополярных или двуполярных прямоугольных импульсов, поступающих от электронного коммутатора. Результирующий угол поворота ротора соответствует числу переключений коммутатора, а частота вращения двигателя соответствует частоте переключений электронного коммутатора.
По конструктивным особенностям различаются шаговые двигатели активного типа (с постоянными магнитами), реактивного типа и индукторные.
На рис. 5.7 изображена схема m-фазного шагового двигателя без обмотки возбуждения на роторе.
Если питать поочередно фазы 1, 2, 3, . m обмотки якоря рассматриваемого двигателя одно полярными импульсами напряжения, то ротор двигателя будет скачкообразно перемещаться в положения, при которых его ось совпадает с осями фаз 1, 2, 3 и т. д.
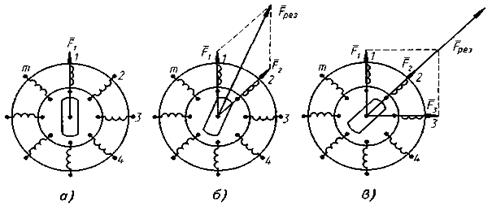 |
| Рис. 5.7. К принципу действия шагового двигателя |
Ротор при этом будет иметь т устойчивых состояний, соответствующих направлению вектора МДС F обмотки якоря в данный момент времени; при этом шаг ротора равен 2π/m
Для увеличения результирующей МДС якоря и синхронизирующего момента одновременно подают питание на две, три и большее количество фаз. Например, если одновременно подать напряжение на две фазы, то положение результирующего вектора МДС F и оси ротора совпадает с линией, проходящей между осями двух соседних фаз (рис. 5.7,6). При подаче питания одновременно на три соседние фазы ротор перемещается в положение, совпадающее с осью средней фазы (рис. 5.7,6). Если поочередно включать четное (две), или нечетное (одна, три) число фаз, то ротор двигателя будет иметь 2т устойчивых состояния и шаг двигателя будет равен π/m.
Управление двигателем, при котором фазы обмотки якоря включают поочередно равными группами по две, три и т. д., называют симметричным, поочередное включение неравных групп фаз — несимметричным.
Шаговые двигатели с постоянными магнитами имеют ротор в виде постоянного магнита (звездочки) литой или составной конструкции без полюсных наконечников. Статор имеет явновыраженные полюсы, на которых в полузакрытых пазах размещают катушки обмотки якоря. Обмотка статора может быть двух-, трех-, четырехфазной. В многополюсных машинах число пазов на полюс и фазу q = 1, т. е. обмотку выполняют сосредоточенной. Шаговые двигатели этого типа называют также магнитоэлектрическими.
В двигателе с двухфазной обмоткой якоря при последовательной подаче импульсов напряжения на катушки полюсов ось магнитного потока скачкообразно перемещается на 90° (рис. 5.8).
| Рис. 5.8. Последовательность перемещения ротора шагового двигателя |
В результате под действием синхронизирующего момента при каждом импульсе ротор поворачивается на 90°, т. е. делает шаг, равный 90°.
Возникновение синхронизирующего момента в шаговом двигателе при подаче питания на фазы обмотки якоря обусловлено теми же причинами, что и в синхронном двигателе обычного исполнения.
Каждому импульсу тока соответствует определенное положение ротора двигателя. Чтобы изменить направление вращения ротора, следует изменить полярность включения одной из фаз обмотки якоря, не меняя очередность их коммутации. Для уменьшения шага ротора шаговые двигатели выполняют многополюсными. При этом число полюсных выступов на роторе должно быть равно числу полюсов статора. Наиболее часто используют восьмиполюсные шаговые двигатели. Шаг двигателя представляет собой угол поворота ротора за один такт:
где k — число тактов в одном цикле; р — число пар полюсов. Частота вращения ротора двигателя зависит от частоты подачи импульсов:
Диапазон изменения частоты при четырехтактной коммутации обычно составляет 0. 500 Гц; максимальной частоте соответствует частота вращения до 3000 мин -1 .
Чаще всего шаговые двигатели имеют четырехфазную обмотку, которая может управляться однополярными импульсами напряжения, что упрощает конструкцию электронного коммутатора. При подключении к коммутатору фазы такой обмотки соединяют в четырехлучевую звезду с выведенной общей точкой.
Реактивные шаговые двигатели имеют ротор из магнитно-мягкого материала. На статоре обычно располагают трехфазную сосредоточенную обмотку, фазы которой получают питание от электронного коммутатора. Реактивные шаговые двигатели называют также параметрическими.
Шаг реактивного двигателя можно уменьшить, если увеличить число выступов на роторе. На рис. 5.9 показаны три такта работы шагового двигателя с крестообразным ротором. При той же последовательности подачи импульсов, что и для двигателя, показанного на рис. 5.8, шаг этого двигателя составляет 15°.
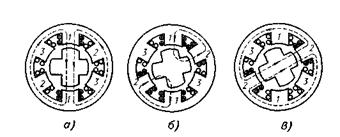
Рис. 5.9. Такты работы шагового реактивного двигателя
с крестообразным ротором
Дальнейшее уменьшение шага, т. е. повышение точности работы двигателя, можно обеспечить, увеличив число выступов на статоре и роторе, т. е. перейдя к схеме редукторного двигателя.
При малом шаге (1°. 5°) применяют реактивный редукторный шаговый двигатель с гребенчатыми выступами на статоре. Выпускаемые отечественной промышленностью реактивные редукторные шаговые двигатели имеют на статоре шесть полюсных выступов с гребенчатой зубцовой зоной.
У активных шаговых двигателей есть существенный недостаток: они имеют крупный шаг, который может достигать десятков градусов.
Реактивные шаговые двигатели позволяют редуцировать частоту вращения ротора. В результате можно получить шаговые двигатели с угловым шагом, составляющим доли градуса. Отличительной особенностью реактивного редукторного двигателя является расположение зубцов на полюсах статора (рис. 5.10).
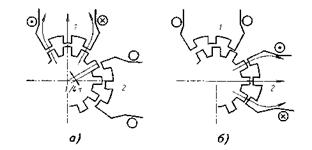
Рис. 5.10. Принцип действия реактивного редукторного
а — при возбужденном полюсе /;
б — при возбужденном полюсе 2 (шаг 1/4т)
При большом числе зубцов ротора Zpего угол поворота значительно меньше угла поворота поля статора. Величина углового шага редукторного реактивного шагового двигателя определится выражением:
Электромагнитный синхронизирующий момент реактивного двигателя обусловлен, как и в случае обычного синхронного двигателя, разной величиной магнитных сопротивлений по продольной и поперечной осям двигателя.
Основным недостатком шагового реактивного двигателя является отсутствие синхронизирующего момента при обесточенных обмотках статора.
Повышение степени редукции шаговых двигателей, как активного типа, так и реактивного, можно достичь применением двух, трех и многопакетных конструкций. Зубцы статора каждого пакета сдвинуты относительно друг друга на часть зубцового деления. Если число пакетов равно двум, то этот сдвиг равен 1/2 зубцового деления, если три, то — 1/3, и т. д. В то же время роторы-звездочки каждого из пакетов не имеют ' пространственного сдвига, т. е. оси их полюсов полностью совпадают.
Такая конструкция сложнее в изготовлении и дороже однопакетной, и, кроме того, требует сложного коммутатора.
Стремление совместить преимущества активного шагового двигателя (большой удельный синхронизирующий момент на единицу объема, наличие фиксирующего момента) и реактивного шагового двигателя (малая величина шага) привело к созданию гибридных индукторных шаговых двигателей. В настоящее время имеется большое число различных конструкций индукторных двигателей, которые отличаются числом фаз, размещением обмоток, способом фиксации ротора при обесточенном статоре и т. д.
Во всех конструкциях гибридных индукторных шаговых двигателей вращающий момент создается за счет взаимодействия магнитного поля, создаваемого обмотками статора и постоянного магнита в зубчатой структуре воздушного зазора. При этом синхронизирующий момент шагового индукторного двигателя по природе является реактивным и создается намагничивающей силой обмоток статора, а постоянный магнит, расположенный либо на статоре, либо на роторе, создает фиксирующий момент, удерживающий ротор двигателя в заданном положении при отсутствии тока в обмотках статора.
По сравнению с шаговым двигателем реактивного типа у индукторного шагового двигателя при одинаковой величине шага больше синхронизирующий момент, лучшие энергетические и динамические характеристики.
Линейные шаговые синхронные двигатели.При автоматизации производственных процессов весьма часто необходимо перемещать объекты в плоскости (например, в графопостроителях современных ЭВМ и т. д.). В этом случае приходится применять преобразователь вращательного движения в поступательное с помощью кинематического механизма.
Линейные шаговые двигатели преобразуют импульсную команду непосредственно в линейное перемещение. Это позволяет упростить кинематическую схему различных электроприводов (рис. 5.11).
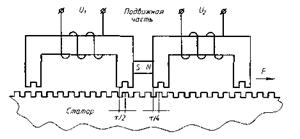
Рис. 5.11. Схема линейного шагового двигателя
Статор линейного шагового двигателя представляет собой плиту из магнитомягкого материала. Подмагничивание магнитопроводов производится постоянным магнитом. Зубцовые деления статора и подвижной части двигателя равны. Зубцовые деления в пределах одного магнитопровода ротора сдвинуты на половину зубцового деления τ/2. Зубцовые деления второго магнитопровода сдвинуты относительно зубцовых делений первого магнитопровода на четверть зубцового деления τ/4. Магнитное сопротивление потоку подмагничивания не зависит от положения подвижной части.
Принцип действия линейного шагового двигателя не отличается от принципа действия индукторного шагового двигателя. Разница лишь в том, что при взаимодействии потока обмоток управления с переменной составляющей потока подмагничивания создается не момент, а сила FС, которая перемещает подвижную часть таким образом, чтобы против зубцов данного магнитопровода находились зубцы статора, т. е. на четверть зубцового деления τ/4.
где КТ — число тактов схемы управления.
Для перемещения объекта в плоскости по двум координатам применяются двухкоординатные линейные шаговые двигатели.
В линейных шаговых двигателях применяют магнито-воздушную подвеску. Ротор притягивается к статору силами магнитного притяжения полюсов ротора. Через специальные форсунки под ротор нагнетается сжатый воздух, что создает силу отталкивания ротора от статора. Таким образом, между статором и ротором создается воздушная подушка, и ротор подвешивается над статором с минимальным воздушным зазором. При этом обеспечивается минимальное сопротивление движению ротора и высокая точность позиционирования.
Шаговый двигатель работает устойчиво, если в процессе отработки угла при подаче на его обмотки управления серии импульсов не происходит потери ни одного шага. Это значит, что в процессе отработки каждого из шагов ротор двигателя занимает устойчивое равновесие по отношению к вектору результирующей магнитной индукции дискретно вращающегося магнитного поля статора.
Режим отработки единичных шагов соответствует частоте импульсов управления, подаваемых на обмотки шагового двигателя, при котором шаговый двигатель отрабатывает до прихода следующего импульса заданный угол вращения αш. В начале каждого шага угловая скорость вращения двигателя равна 0.
При этом возможны колебания угла Да поворота ротора двигателя относительно установившегося значения, которые обусловлены запасом кинетической энергии, накопленной ротором при отработке угла αш (рис. 5.12). По мере отработки управляющих импульсов растер угол поворота ротора Ɵ2. Кинетическая энергия ротора преобразуется в потери: механические, магнитные и электрические. Чем больше величина перечисленных потерь, тем быстрее заканчивается переходный процесс отработки единичного шага двигателем.
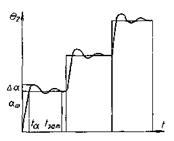 |
| Рис. 5.12. Процесс отработки шагов шаговым двигателем за время шага ta |
В процессе пуска ротор может отставать от потока статора на шаг и более; в результате может быть расхождение между числом шагов ротора и потока статора.
Основными характеристиками шагового двигателя являются: шаг, предельная механическая характеристика и приемистость. Предельной механической характеристикой называют зависимость максимального синхронизирующего момента от частоты управляющих импульсов (рис. 5.13).
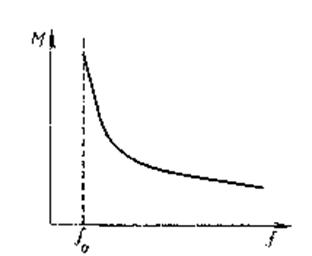
Рис. 5.12. Процесс отработки шагов шаговым двигателем за время
При высоких частотах вращения (2000. 3000 об/мин) применяют шаговые двигатели с постоянными магнитами, расположенными на роторе. Наличие активного ротора позволяет получить относительно большие моменты и обеспечить фиксацию ротора при обесточенных обмотках. При низких частотах вращения (до 1000 об/мин) и малом шаге применяют индукторные и реактивные двигатели с гребенчатыми выступами на полюсах статора.
Редукторные двигатели
Синхронные редукторные микродвигатели — это машины, частота вращения ротора которых зависит от числа зубцов ротора. Редукторные трех- и двухфазные индукторные машины широко применяют в качестве генераторов и в качестве двигателей.
Синхронная частота вращения поля двигателя:
Синхронная частота вращения ротора:
Таким образом отношение:
Величину, kред называют коэффициентом редукции. Он показывает, во сколько раз частота вращения ротора меньше частоты вращения магнитного поля, поэтому индукторные двигатели часто называют редукторными.
Редукторные двигатели могут быть трех типов: с электромагнитным возбуждением (на статоре или роторе), с постоянными магнитами или без возбуждения (реактивные). В зависимости от расположения обмотки возбуждения или постоянных магнитов различают двигатели с осевым и радиальным возбуждением.
На рис. 5.14 изображено устройство редукторного реактивного двигателя. Двигатель состоит из статора 1 с трех- или двухфазной обмоткой, расположенной на полюсах 3 статора и ротора 4, имеющего зубцы. В редукторном реактивном двигателе число пазов больше или меньше числа пазов ротора, т. е. зубцовые деления статора и ротора различны. Принцип действия реактивного редукторного двигателя сводится к следующему. В исходный момент времени ось магнитного потока совпадает с осью полюсов статора, и ротор расположен так, что магнитное сопротивление для потока, замыкающегося по этой оси, является минимальным.
Рис. 5.15. Устройство редукторного реактивного двигателя
Когда ось вращающегося магнитного потока повернется и будет совпадать с осью соседних полюсов, на зубцы, расположенные под этими полюсами, будет действовать реактивный момент. При этом ротор повернется на 1/3 зубцового деления против направления вращения поля так, что зубцы на роторе встанут против зубцов на этих полюсах. При дальнейшем вращении магнитного поля будет, происходить и вращение ротора, но повороту поля на половину окружности якоря будет соответствовать поворот ротора всего на одно зубцовое деление. Таким образом, коэффициент редукции
Обычно 2р = 2 и частота вращения ротора:
Пуск в ход редукторных двигателей осуществляется при помощи короткозамкнутой обмотки, расположенной на роторе. Если частота вращения низка, а ротор имеет малый момент инерции, то он может втягиваться в синхронизм непосредственно, без каких-либо пусковых устройств.
Мощность редукторных двигателей находится в пределах 1. 40 Вт. КПД их составляет 20. 40%.
Наряду с двигателями в системах следящего привода, в радиолокационных и гироскопических устройствах широко используются индукторные генераторыповышенной частоты, находящейся в пределах от 400 до 30000 Гц. В конструктивном отношении генераторы отличаются от двигателей тем, что имеют на статоре кроме обмотки переменного тока еще обмотку возбуждения, питаемую постоянным током. Роторы индукционных генераторов выполняют без обмоток с большим числом зубцов. Таким образом, в основе принципа работы индукционных генераторов лежит действие зубцовых гармоник. Индукторные генераторы имеют более низкий КПД, чем обычные синхронные машины, что объясняется значительным увеличением добавочных потерь в стали и обмотке якоря из-за высокой частоты перемагничивания.
Для работы практически всех электрических приборов, необходимы специальные приводные механизмы. Предлагаем рассмотреть, что такое шаговый двигатель, его конструкцию, принцип работы и схемы подключения.
Что такое шаговый двигатель?
Шаговый двигатель представляет собой электрическую машину, предназначенную для преобразования электрической энергии сети в механическую энергию. Конструктивно состоит из обмоток статора и магнитомягкого или магнитотвердого ротора. Отличительной особенностью шагового двигателя является дискретное вращение, при котором заданному числу импульсов соответствует определенное число совершаемых шагов. Наибольшее применение такие устройства получили в станках с ЧПУ, робототехнике, устройствах хранения и считывания информации.
В отличии от других типов машин шаговый двигатель совершает вращение не непрерывно, а шагами, от чего и происходит название устройства. Каждый такой шаг составляет лишь часть от его полного оборота. Количество необходимых шагов для полного вращения вала будет отличаться, в зависимости от схемы соединения, марки двигателя и способа управления.
Преимущества и недостатки шагового электродвигателя
К преимуществам эксплуатации шагового двигателя можно отнести:
- В шаговых электродвигателях угол поворота соответствует числу поданных электрических сигналов, при этом, после остановки вращения сохраняется полный момент и фиксация;
- Точное позиционирование – обеспечивает 3 – 5% от установленного шага, которая не накапливается от шага к шагу;
- Обеспечивает высокую скорость старта, реверса, остановки;
- Отличается высокой надежностью за счет отсутствия трущихся компонентов для токосъема, в отличии от коллекторных двигателей;
- Для позиционирования шаговому двигателю не требуется обратной связи;
- Может выдавать низкие обороты для непосредственно подведенной нагрузки без каких-либо редукторов;
- Сравнительно меньшая стоимость относительно тех же сервоприводов;
- Обеспечивается широкий диапазон управления скоростью оборотов вала за счет изменения частоты электрических импульсов.
К недостаткам применения шагового двигателя относятся:
- Может возникать резонансный эффект и проскальзывание шагового агрегата;
- Существует вероятность утраты контроля из-за отсутствия обратной связи;
- Количество расходуемой электроэнергии не зависит от наличия или отсутствия нагрузки;
- Сложности управления из-за особенности схемы
Устройство и принцип работы

Рис. 1. Принцип действия шагового двигателя
На рисунке 1 изображены 4 обмотки, которые относятся к статору двигателя, а их расположение устроено так, что они находятся под углом 90º относительно друг друга. Из чего следует, что такая машина характеризуется размером шага в 90º.
В момент подачи напряжения U1 в первую обмотку происходит перемещение ротора на те же 90º. В случае поочередной подачи напряжения U2, U3, U4 в соответствующие обмотки, вал продолжит вращение до завершения полного круга. После чего цикл повторяется снова. Для изменения направления вращения достаточно изменить очередность подачи импульсов в соответствующие обмотки.
Типы шаговых двигателей
Для обеспечения различных параметров работы важна как величина шага, на который будет смещаться вал, так и момент, прилагаемый для перемещения. Вариации данных параметров достигаются за счет конструкции самого ротора, способа подключения и конструкции обмоток.
По конструкции ротора
Вращаемый элемент обеспечивает магнитное взаимодействие с электромагнитным полем статора. Поэтому его конструкция и технические особенности напрямую определяют режим работы и параметры вращения шагового агрегата. Чтобы на практике определить тип шагового мотора, при обесточенной сети необходимо провернуть вал, если ощущаете сопротивление, то это свидетельствует о наличии магнита, в противном случае, это конструкция без магнитного сопротивления.
Реактивный
Реактивный шаговый двигатель не оснащается магнитом на роторе, а выполняется из магнитомягких сплавов, как правило, его набирают из пластин для уменьшения потерь на индукцию. Конструкция в поперечном разрезе напоминает шестерню с зубцами. Полюса статорных обмоток запитываются противоположными парами и создают магнитную силу для перемещения ротора, который двигается от попеременного протекания электрического тока в обмоточных парах.

С переменным магнитным сопротивлением
Весомым плюсом такой конструкции шагового привода является отсутствие стопорящего момента, образуемого полем по отношению к арматуре. По факту это тот же синхронный двигатель, в котором поворот ротора идет в соответствии с полем статора. Недостатком является снижение величины вращающего момента. Шаг для реактивного двигателя колеблется от 5 до 15°.
С постоянными магнитами
В этом случае подвижный элемент шагового двигателя собирается из постоянного магнита, в котором может быть два и большее количеством полюсов. Вращение ротора обеспечивается притяжением или отталкиванием магнитных полюсов электрическим полем при подаче напряжения в соответствующие обмотки. Для этой конструкции угловой шаг составляет 45-90°.

С постоянным магнитом
Гибридные
Был разработан с целью объединения лучших качеств двух предыдущих моделей, за счет чего агрегат обладает меньшим углом и шагом. Его ротор выполнен в виде цилиндрического постоянного магнита, который намагничен по продольной оси. Конструктивно это выглядит как два круглых полюса, на поверхности которых расположены зубцы ротора из магнитомягкого материала. Такое решение позволило обеспечить отличный удерживающий и крутящий момент.

Устройство гибридного шагового двигателя
Преимущества гибридного шагового двигателя заключатся в его высокой точности, плавности и скорости перемещения, малым шагом – от 0,9 до 5°. Их применяют для высококлассных станков ЧПУ, компьютерных и офисных приборах и современной робототехнике. Единственным недостатком считается относительно высокая стоимость.
Для примера разберем вариант гибридных ШД на 200 шагов позиционирования вала. Соответственно каждый из цилиндров будет иметь по 50 зубцов, один из них является положительным полюсом, второй отрицательным. При этом каждый положительный зубец расположен напротив паза в отрицательном цилиндре и наоборот. Конструктивно это выглядит так:

Расположение пазов гибридника
Из-за чего на валу шагового двигателя получается 100 перемежающихся полюсов с отличной полярностью. Статор также имеет зубцы, как показано на рисунке 6 ниже, кроме промежутков между его компонентами.

Рис. 6. Принцип работы гибридного ШД
За счет такой конструкции можно достичь смещения того же южного полюса относительно статора в 50 различных позиций. За счет отличия положения в полупозиции между северным и южным полюсом достигается возможность перемещения в 100 позициях, а смещение фаз на четверть деления предоставляет возможность увеличить количество шагов за счет последовательного возбуждения еще вдвое, то есть до 200 шагов углового вала за 1 оборот.
Обратите внимание на рисунок 6, принцип работы такого шагового двигателя заключается в том, что при попарной подаче тока в противоположные обмотки происходит подтягивание разноименных полюсов ротора, расположенных за зубьями статора и отталкивание одноименных, идущих перед ними по ходу вращения.
По виду обмоток
На практике шаговый двигатель представляет собой многофазный мотор. Плавность работы в котором напрямую зависит от количества обмоток – чем их больше, тем плавне происходит вращение, но и выше стоимость. При этом крутящий момент от числа фаз не увеличивается, хотя для нормальной работы их минимальное число на статоре электродвигателя должно составлять хотя бы две. Количество фаз не определяет числа обмоток, так двухфазный шаговый двигатель может иметь четыре и более обмотки.
Униполярный
Униполярный шаговый двигатель отличается тем, что в схеме подключения обмотки имеется ответвление от средней точки. Благодаря чему легко меняются магнитные полюса. Недостатком такой конструкции является использование только одной половины доступных витков, из-за чего достигается меньший вращающий момент. Поэтому они отличаются большими габаритами.

Униполярный ШД
Для использования всей мощности катушки средний вывод оставляют не подключенным. Рассмотрите конструкции униполярных агрегатов, они могут содержать 5 и 6 выводов. Их количество будет зависеть от того, выводится срединный провод отдельно от каждой обмотки двигателя или они соединяются вместе.

Схема а) с различными, б) с одним выводом
Биполярный
Биполярный шаговый двигатель подключается к контроллеру через 4 вывода. При этом обмотки могут соединяться внутри как последовательно, так и параллельно. Рассмотрите пример его работы на рисунке.

Биполярный шаговый двигатель
В конструктивной схеме такого двигателя вы видите с одной обмоткой возбуждения в каждой фазе. Из-за этого смена направления тока требует использовать в электронной схеме специальные драйверы (электронные чипы, предназначенные для управления). Добиться подобного эффекта можно при помощи включения Н-моста. В сравнении с предыдущим, биполярное устройство обеспечивает тот же момент при гораздо меньших габаритах.
Подключение шагового двигателя
Чтобы запитать обмотки, потребуется устройство способное выдать управляющий импульс или серию импульсов в определенной последовательности. В качестве таких блоков выступают полупроводниковые приборы для подключения шагового двигателя, микропроцессорные драйвера. В которых имеется набор выходных клемм, каждая из них определяет способ питания и режим работы.
В зависимости от схемы подключения должны применяться те или другие выводы шагового агрегата. При различных вариантах подведения тех или иных клемм к выходному сигналу постоянного тока получается определенная скорость вращения, шаг или микрошаг линейного перемещения в плоскости. Так как для одних задач нужна низкая частота, а для других высокая, один и тот же двигатель может задавать параметр за счет драйвера.
Типичные схемы подключения ШД
В зависимости того, какое количество выводов представлено на конкретном шаговом двигателе: 4, 6 или 8 выводов, будет отличаться и возможность использования той или иной схемы их подключения Посмотрите на рисунки, здесь показаны типичные варианты подключения шагового механизма:

Схемы подключения различных типов шаговых двигателей
При условии запитки основных полюсов шаговой машины от одного и того же драйвера, по данным схемам можно отметить следующие отличительные особенности работы:
- Выводы однозначно подводятся к соответствующим клеммам устройства. При последовательном соединении обмоток увеличивает индуктивность обмоток, но понижает ток.
- Обеспечивает паспортное значение электрических характеристик. При параллельной схеме увеличивается ток и снижается индуктивность.
- При подключении по одной фазе на обмотку снижется момент на низких оборотах и уменьшает величину токов.
- При подключении осуществляет все электрические и динамические характеристики согласно паспорта, номинальный токи. Значительно упрощается схема управления.
- Выдает куда больший момент и применяется для больших частот вращения;
- Как и предыдущая предназначена для увеличения момента, но применяется для низких частот вращения.
Управление шаговым двигателем
Выполнение операций шаговым агрегатом может осуществляться несколькими методами. Каждый из которых отличается способом подачи сигналов на пары полюсов. Всего выделяют тир метода активации обмоток.
Волновой – в таком режиме происходит возбуждение только одной обмотке, к которой и притягиваются роторные полюса. При этом шаговый двигатель не способен вытягивать большую нагрузки, так как выдает лишь половину момента.

Волновое управление
Полношаговый — в таком режиме происходит одновременная коммутация фаз, то есть, возбуждаются сразу обе. Из-за чего обеспечивается максимальный момент, в случае параллельного соединения или последовательного включения обмоток будет создаваться максимальное напряжение или ток.

Полношаговое управление
Полушаговый – представляет собой комбинацию двух предыдущих методов коммутации обмоток. Во время реализации которого в шаговом двигателе происходит поочередная подача напряжения сначала в одну катушку, а затем сразу в две. Благодаря чему обеспечивается лучшая фиксация на максимальных скоростях и большее количество шагов.

Полушаговое управление
Для более мягкого управления и преодоления инерции ротора используется микрошаговое управление, когда синусоида сигнала осуществляется микроступенчатыми импульсами. За счет чего силы взаимодействия магнитных цепей в шаговом двигателе получают более плавное изменение и, как следствие, перемещение ротора между полюсами. Позволяет в значительной степени снизить рывки шагового двигателя.
Без контроллера
Для управления бесколлекторными двигателями применяется система Н-моста. Который позволяет переключать полярность для реверса шагового двигателя. Может выполняться на транзисторах или микросхемах, которые создают логическую цепочку для перемещения ключей.

Схема Н-моста
Как видите, от источника питания V напряжение подается на мост. При попарном включении контактов S1 – S4 или S3 – S2 будет происходить движение тока через обмотки двигателя. Что и обусловит вращение в ту или иную сторону.
С контроллером
Устройство контроллера позволяет осуществлять управление шаговым двигателем в различных режимах. В основе контроллера лежит электронный блок, формирующий группы сигналов и их последовательность, посылаемых на катушки статора. Для предотвращения возможности его повреждения в случае короткого замыкания или другой аварийной ситуации на самом двигателе каждый вывод защищается диодом, который не пропусти импульс в обратную сторону.

Подключение через контроллер однополярного шагового двигателя
Популярные схемы управления ШД

Схема управления от контроллера с дифференциальным выходом
Является одним из наиболее помехозащищенных способов работы. При этом прямой и инверсный сигнал напрямую подключается к соответствующим полюсам. В такой схемы должно применяться экранирование сигнального проводника. Прекрасно подходит для нагрузки с низкой мощностью.
В данной схеме происходит объединение положительных вводов контроллера, которые подключаются к положительному полюсу. В случае питания выше 9В требуется включение в схему специального резистора для ограничения тока. Позволяет задавать необходимое количество шагов со строго установленной скоростью, определить ускорение и т.д.
Простейший драйвер шагового двигателя своими руками
Чтобы собрать схему драйвера в домашних условиях могут пригодиться некоторые элементы от старых принтеров, компьютеров и другой техники. Вам понадобятся транзисторы, диоды, резисторы (R) и микросхема (RG).

Схема простейшего драйвера
Для построения программы руководствуйтесь следующим принципом: при подаче на один из выводов D логической единицы (остальные сигнализируют ноль) происходит открытие транзистора и сигнал проходит к катушке двигателя. Таким образом, выполняется один шаг.
На основе схемы составляется печатная плата, которую можно попытаться изготовить самостоятельно или сделать под заказ. После чего на плате впаиваются соответствующие детали. Устройство способно управлять шаговым устройством от домашнего компьютера за счет подключения к обычному USB порту.
Читайте также: