
Навигационные технологии в нейрохирургии реферат
Обновлено: 05.07.2024
Внедрение компьютерной томографии (КТ) в клиническую практику возобновило интерес к стереотаксической нейрохирургии. С помощью КТ внутримозговые поражения хорошо визуализируются, а снимки просты в использовании системы стереотаксических координат. После введения магнитно-резонансной томографии (МРТ) в 1980-х, эти наборы данных были также внедрены в стереотаксическую технику и могут быть использованы как для планирования, так и для стереотаксической хирургии.
В отличие от стереотаксической техники, которая указывает конечную точку в пространстве, объемный метод обеспечивает расчет объема опухоли и, следовательно, границы поражения. Для математического расчета необходима компьютерная система.
Хотя рамная стереотаксическая техника очень точна, и позволяет выявить глубокие поражения, вся система является громоздкой и мешает хирургической процедуре.
В 1986 г. Roberts et al. ввел в клиническую практику бескаркасные нейронавигационные системы. В результате, больше не требовалась рамная система для расчета трехмерного пространства черепа и головного мозга, она была заменена на датчик, приклеенный к голове пациента. В отличие от рамной системы, при стереотаксическом наведении, информация о фактическом положении инструмента во время операции обеспечивалась за счет бескаркасной системы нейронавигации.
В настоящее время нейронавигационные системы стали стандартом в современной нейрохирургии, в основном это бескабельные системы на светоизлучающих диодах (СИД).
После окончания предоперационного планирования данные передаются из блока планирования в систему нейронавигации. Снимки отображаются на экране компьютера в трех плоскостях (фронтальной, аксиальной, сагиттальной). Перед операцией фиксируется голова пациента, а звезда закрепляется на держателе головы. Оцифровка поверхности головы проводится касанием кончиком стрелки контрольных точек на коже. На основе взаиморасположения стрелки и звезды компьютер может вычислить положение головы пациента.
Альтернативой установок с использованием системы координат служат установки с лазерной системой регистрации контура головы. Преимуществом этой системы является процедура контурной регистрации без использования дополнительных кожных маркеров. После регистрации, указатель может использоваться для навигации. Положение указателя отображается на экране компьютера в реальном времени, и можно провести предоперационное планирование. Кончик инструмента может быть виртуально продлен для расчета наилучшей траектории до цели.
На различные хирургические инструменты могут быть установлены специальные адаптеры (например, биполярные щипцы), и они тоже могут быть использованы для навигации. Даже операционный микроскоп может быть оснащен навигационным устройством для отображения фокуса на экране компьютера. Главный дисплей позволяет в этом режиме сосредоточить контуры опухоли в центре поля зрения микроскопа. Техника слияния изображений позволяет интегрировать различные результаты ПЭТ и МРТ в единой нсйронави-гационной системе. Объединение ПЭТ с навигационными данными полезно при лечении хорошо визуализируемых при ПЭТ глиом или расплывчатой визуализации контуров опухоли по данным МРТ или КТ.
б) Интраоперационные изображения. Безрамные системы нейронавигации в современной нейрохирургии, как правило, выполняются на основе предоперационной нейровизуализации. Хотя при правильном использовании нейронавигации могут быть достигнуто полное удаление видимой опухоли, в некоторых случаях бывает полезна и интраоперационная визуализация. Мозг не является устойчивым органом, смещение до 1 см способно полностью изменить анатомическую ситуацию. Сдвиг границ мозга может быть вызван его отеком, особенно после вскрытия твердой мозговой оболочки и удаления опухоли. Таким образом, интраоперационная визуализация может иметь решающее значение для оптимальной резекции опухоли при обновлении фактической анатомической ситуации.
Ультразвуковое исследование уже давно используется для локализации патологических структур во время оперативного вмешательства. Этот метод используется для идентификации глубинных поражений. Возможность управляемой резекции с помощью ультразвуковой навигации вызывает разноречивые мнения. Разработки в данной области выглядят обнадеживающе, особенно возможность трехмерного ультразвукового исследования, которое может привести к новому качеству интраоперационной визуализации. Интеграция в нейронавигационную систему ультрасонографии в режиме реального времени, также как и 3D-визуализация способны улучшить хирургические результаты.
Lunsford и Okudera сообщали о использовании интраоперационной компьютерной томографии в 1980-х годах. В настоящее время используются мобильные компьютерные томографы с высоким качеством изображения. О полезности и широте использования, а также успешности интеграции в условиях операционного зала уже сообщались. У нас накоплен большой опыт работы с мобильными компьютерными томографами. Мобильный томограф может быть легко интегрирован в работу операционной; дополнительное оборудование не требуются. Тем не менее, в хирургии опухолей, использование интраоперационного контроля резекции ограничено плохой визуализацией низкодифференцированных опухолей. Контуры низкодифференцированной глиомы на КТ изображениях недостаточно четкие.
Для этой цели методом выбора может быть интраоперационная МРТ (iMRI). Использование iMRI в нейрохирургии началось в 1994 г.. Напряженность поля MR колеблется между 0,12 и 1,5 Тесла, но большинство центров использует системы со слабым полем. Разработаны различные модификации iMRI. При использовании вертикально открытых МРТ, хирургическая процедура выполняется при положении пациента внутри сканера. В этой связи, оперативная укладка совершенно иная, чем без iMRI. Рабочее пространство для хирурга очень ограничено. Необходимы совместимые с МРТ хирургические инструменты, а также совместимый микроскоп. При мобильной МРТ в этом нет необходимости.
Sutherland et al. описали магнитно-резонансный томограф, который крепится к потолку. Сканер может быть перемещен к пациенту при необходимости iMRI. Кроме того, MR сканер может находиться в другой комнате рядом с операционной, и пациент может быть перемещен в сканер. Операция проводится на расстоянии от магнита, и предоперационные настройки не требуют изменений (например, положение пациента или хирурга). Оба варианта предполагают очень большую операционную или две комнаты. Другие авторы сообщают о компактном мобильном МР-сканере с интегрированной системой навигации, данные которой могут быть сохранены в соответствии с положением операционного стола.
Сканер задрапирован и может быть перемещен к пациенту, дополнительное оборудование не требуется. Данная установка полезна в хирургии низкодифференцированных глиом и аденомы гипофиза, также как и при стереотаксической биопсии, хирургии аневризм, эпилепсии и позвоночника. В принципе, iMRI может применяться во всех ситуациях, требующих интраоперационной визуализации.
Несмотря на высокую стоимость iMRI, эта технология, вероятно, станет стандартом в современной нейрохирургии. Высокопольные сканеры обеспечивают высокое качество изображений анатомических и функциональных структур с помощью fMPT, диффузно-взвешенной МРТ, МР-ангиографии, диффузно-тензорных изображений и МРТ-спектроскопии.
Еще один интересный метод, который используется для получения интраоперационной информации о функциональных зонах, включает сочетание навигации с электрофизиологическими методами. Отношение опухоли к функциональным зонам мозга, особенно во время операции в центральном регионе может быть визуализировано после передачи функциональных данных, например, от прямых электрических корковых отведений к навигационной системе.
Кроме того, перспективы включают роботизированную хирургию с использованием навигации.
А. Ультразвуковые аппараты.
Б, В. Интраоперационное ультразвуковое исследование внутримозговых кистозных поражений. А. Операционная с мобильным сканером компьютерной томографии.
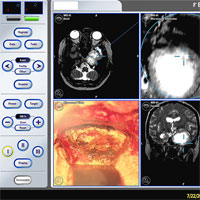
Б. Дооперационные (слева) и интраоперационные КТ (справа). Polestar МР-томограф для интраоперационного применения. Дооперационные (слева) и интраоперационные (справа):
А. МР изображения злокачественной глиомы.
Б. дооперационные (слева) и интраоперационные (справа) MR изображения аденомы гипофиза.
Редактор: Искандер Милевски. Дата обновления публикации: 18.3.2021

Нейрохирургия отличается завидной скоростью развития. В последние десятилетия она достигла небывалых успехов в области применения новейших технологических разработок.
Уже сегодня высокотехнологичные методы стали применяться практически при любой нейрохирургической патологии. Это помогает хирургам освоить новые направления, уменьшить время операции и сократить частоту ошибок, вызванных человеческим фактором.
Один из новых методов - ориентирование в структурах головного мозга и позвоночника с использованием навигационных систем. Их принцип действия основан на том же методе, который применяется в GPS навигации. Камера инфракрасного излучения излучает сигнал, который отражается от специальных отражающих сфер-маркеров, установленных на хирургическом инструментарии. На камере размещены регистрирующие датчики, собирающие сигнал в трёх плоскостях в онлайн режиме. По расположению точек-сфер, от которых отражается сигнал, система и определяет местоположение и угол наклона инструмента.
Базовые компоненты навигационных систем
- Камера,
- Трекеры-метки,
- Компьютер с ПО,
- Монитор для представления информации операционной бригаде.
Важнейшей составляющей навигационных систем является программное обеспечение. Компьютер с ПО выполняет роль головного мозга навигационной системы. В компьютере содержатся результаты 3D исследований (КТ, МРТ, ПЭТ), информация от следящей камеры о расположении референтного (нулевого) трекера и навигируемого хирургического инструмента.
Это позволяет проводить сопряжение данных инструментальных методов исследования с реальной топографией навигируемой области пациента и последующим представлением информации о местонахождении инструмента в трёхмерном пространстве по отношению к зонам интереса.
КТ и МРТ необходимо выполнять по специальному протоколу для правильного построения виртуальной трёхмерной модели головы на станции навигационной системы. Полученные данные переносят в формате DICOM на станцию нейронавигации, где осуществляется дальнейшая обработка и подготовка к оперативному лечению. Загрузка данных производится через дисковод (СD, DVD) или через сеть.
Этапы нейронавигации
- Выбор и индентификация референтных точек, используемых впоследствии для совмещения виртуального образа головы (позвоночника) и реального физического объекта.
После окончания сбора система создает трёхмерную маску из полученного множества точек. Она накладывается на трёхмерную модель анатомии пациента.
После загрузки снимков пациента в навигационную систему происходит автоматическая реконструкция индивидуального анатомического строения головы с точным определением очагов поражения в трёхмерном режиме.

Нейронавигацией называют использование различных технологий для осуществления прецизионной локализации цели во время операции у реального больного.
Современные навигационные системы:
- Системы классической стереотаксической нейрохирургии, которые используют жесткую привязку головы и всех интракраниальных структур больного к направляющей раме, к которой крепится хирургический инструмент. Однако независимо от конструкции в каждом аппарате сохраняется основной принцип стереотаксического метода- сопоставление координатной системы мозга с координатной системой стереотаксического прибора.
- Системы, использующие пространственную привязку больного не в пространстве ограниченного рамой, а в пространстве вокруг операционного стола. При этом отслеживается движения инструмента в руках хирурга и в реальном времени сообщается, где он находится.
Безрамочная нейронавигация Vector Vision (BrainLab, Германия). Проводили первый этап навигации — предоперационное планирование, которое заключалось в установке виртуальных точек планируемого доступа для предоперационного построения оптимальной траектории к патологическому очагу, а при необходимости делали трехмерное построение этого очага. Траектория доступа рассчитывалась таким образом, чтобы не повредить функционально значимые зоны.
Далее специальной указкой с лазерным излучателем хирургом очерчивается поверхность головы больного, используя естественные анатомические ориентиры (надбровные дуги, нижний край глазницы, переносицу и др.). Система связывает трехмерное изображение из своей памяти с реальным положением головы больного. После регистрации навигационная система выдает точность соответствия головы пациента и виртуальной модели на дисплее.
Под контролем данных дисплея навигационной установки в режиме реального времени с помощью инфракрасного зонда планировался экономный кожный разрез и краниотомия, определяли оптимальное место энцефалотомии, траекторию до опухоли и границы опухоли.
Хирург в любой момент может с точностью до контролировать положение инструмента, планировать траекторию доступа, и достигать выбранной точки наиболее оптимальным и малоинвазивным путем.
Контроль положения хирургических инструментов осуществляется по монитору навигационной системы в трех плоскостях (аксиальной, сагитальной и коронарной) на различных этапах оперативного вмешательства.

Референтная рама так же закрепляется и на операцинном микроскопе. Теперь любые перемещения операционного микроскопа отображаются на мониторе навигационной станции. На мониторе навигационной станции совмещается интраоперационная картина в операционной ране от микроскопа с объемной реконструкцией мозга, патологического очага и сосудов.
При удалении менингиом хиазмально-селлярной области применение навигации и операционного микроскопа дает возможность выделить и сохранить внутреннюю сонную и передние мозговые артерии, предотвратить травму сосудов артериального круга мозга, обеспечить анатомическую сохранность стебля гипофиза и зрительных нервов.
При удалении внутримозговых новообразований функционально важных зон мозга с высокой точностью можно выявить расположение двигательных и чувствительных зон коры, а также основные речевые центры (Брока и Вернике), их топографическое взаимоотношение с опухолью. Трехмерная (3D) реконструкция кортикальных вен играет важную роль в визуализации крупных вен, находящихся в проекции объемного образования. Эти методы при их комплексном использовании дают возможность планировать хирургический доступ таким образом, чтобы снизить вероятность повреждения функционально значимых зон, церебральных сосудов, уменьшить травматизацию здоровой мозговой ткани при стремлении к максимальной резекции опухоли.

В ходе удаления новообразования нейронавигация позволяет точно ориентироваться в зоне хирургического воздействия, оптимизировать доступ к опухоли с учетом морфологических и функциональных особеностей паратуморозной зоны.
На сегодняшний день навигационные технологии получили широкое распространение в практической нейрохирургии. Безрамочная навигация, основанная на предоперационных КТ и МРТ, позволяет спланировать хирургический доступ, свести к минимуму кожный разрез, уменьшить размер трепанации, однако она не учитывает изменение анатомии головного мозга в ходе оперативного вмешательства. Причинами изменения анатомии являются, прежде всего, удаление объема опухоли, отек мозга, а также потеря цереброспинальной жидкости, которые и приводят к смещению мозга. Для решения этой проблемы в настоящее время используются различные методики интраоперационной визуализации (КТ, МРТ, ультразвуковая диагностика)
Безрамочная биопсия с использованием системы нейронавигации внутримозговых опухолей функционально значимых зон мозга, диффузном поражении опухолью полушарий головного мозга, глубинной межполушарной локализации является адекватной альтернативой рамочному стереотаксису.
-
— круглосуточно. — понедельник-пятница, с 08:00 до 21:00; суббота, с 09:00 до 18:00; воскресенье, с 09:00 до 18:00.
В летний период: понедельник-пятница, с 08:00 до 21:00; суббота, с 09:00 до 18:00; воскресенье, с 09:00 до 15:00.
В летний период: понедельник-пятница, с 08:00 до 21:00; суббота, с 09:00 до 18:00; воскресенье, с 09:00 до 15:00.
Новейшая система хирургической навигации, используемая в нашем отделении, позволяет нейрохирургу вычислить наименее травмирующий путь к опухоли, расположенной в самых глубинных уголках головного или спинного мозга, и добраться до нее с минимальной травматизацией. Благодаря этой технологии очень сложные хирургические вмешательства для пациента становятся менее опасными, и значительно упрощается проведение стереотаксической биопсии.


Суть навигационной системы заключается в том, что хирург во время операции видит чрезвычайно точное трехмерное представление того, в какой точке и в каком положении относительно пациента в данный момент находится хирургический инструмент. Автоматически совмещая эти данные с ранее полученной компьютерной томограммой, система помогает точно рассчитать поэтапно, в какие стороны и на какие расстояния нужно двигаться, чтобы достичь объекта исследования.

Принцип работы системы в следующем: специальное устройство посылает сигнал, который отражается от хирургического инструмента, затем специальная камера анализирует отраженный сигнал и вычисляет местоположение инструмента в пространстве. В результате хирург наблюдает на мониторах трехмерную модель операционного поля и инструмента в разных плоскостях.

Данная система совмещает два типа навигации – оптическую или электромагнитную, в зависимости от типа планируемой операции.

Наша навигационная система является модульной и к ней подключается другое оборудование операционной. Например, электронный микроскоп и ЭОП. Кроме того, она интегрируется с единой компьютерной сетью и электронным архивом.
Читайте также: