
Виды сопротивлений в цепи переменного тока кратко
Обновлено: 30.06.2024
В цепях переменного тока выделяют следующие виды сопротивлений.
Активное. Активным называют сопротивление резистора. Условное обозначение
Единицей измерения сопротивления является Ом. Сопротивление резистора не зависит от частоты.
Реактивное. В разделе реактивные выделяют три вида сопротивлений: индуктивное xL и емкостное хс и собственно реактивное. Для индуктивного сопротивления выше была получена формула XL = ωL. Единицей измерения индуктивного сопротивления также является Ом. Величина xL линейно зависит от частоты.
Для емкостного сопротивления выше была получена формула XC = 1 / ωC. Единицей измерения емкостного сопротивления является Ом. Величина хс зависит от частоты по обратно-пропорциональному закону. Просто реактивным сопротивлением цепи называют величину X = XL - XC.
Полное сопротивление. Полным сопротивлением цепи называют величину
Из этого соотношения следует, что сопротивления Z, R и X образуют треугольник: Z – гипотенуза, R и X – катеты. Для удобства в этом треугольнике рассматривают угол φ, который определяют уравнением
и называют углом сдвига фаз. С учетом него можно дать дополнительные связи
При изучении цепей постоянного тока мы установили, что все проводники обладают электрическим сопротивлением, на преодоление которого затрачивается определенное количество электрической энергии. В цепях переменного тока мы встречаемся с несколькими видами сопротивлений, различающихся своей физической природой. Все эти сопротивления можно подразделить на две

Рис. 174. Условные обозначения основных элементов электрических цепей переменного тока
основные группы: активные и реактивные. В активных сопротивлениях при включении в цепь переменного тока электрическая энергия преобразуется в тепловую. Активным сопротивлением R обладают, например, провода электрических линий, обмотки электрических машин и аппаратов и пр., т. е. те же устройства, которые обладают электрическим сопротивлением в цепи постоянного тока. В реактивных сопротивлениях электрическая энергия, вырабатываемая источниками, не расходуется. Как будет показано ниже, при включении реактивного сопротивления в цепь переменного тока возникает лишь обмен энергией между ним и источником электрической энергии.
Реактивное сопротивление создают индуктивности и емкости. Под индуктивностью L будем понимать идеализированный элемент электрической цепи (идеализированную катушку индуктивности), способный запасать энергию в своем магнитном поле, который не имеет активного сопротивления R и емкости С. Аналогично под емкостью С будем понимать идеализированный элемент электрической цепи (идеализированный конденсатор), способный запасать энергию в своем электрическом поле, который не имеет активного сопротивления R и индуктивности L.
При проведении расчетов реальные катушки индуктивности и конденсаторы, в которых имеются потери мощности (из-за наличия активного сопротивления R), часто могут быть заменены с некоторым приближением этими идеализированными элементами, так как переменный ток, проходящий через реальную катушку индуктивности при заданном напряжении и частоте, определяется в основном ее индуктивностью L, а ток, проходящий через реальный конденсатор,—его емкостью С. На рис. 174, а—г стрелками показаны условные положительные направления в идеализированных элементах электрической цепи тока i, напряжения и и э. д. с.
В переменном электрическом токе элементы цепи обладают 2 видами сопротивлений: активным и реактивным.
При каждом виде сопротивления энергия электрического тока преобразуется в другие виды энергий.
Сопротивление называется активным, если энергия электрического тока преобразуется в виде теплоты.
Сопротивление называется реактивным, если энергия тока преобразуется на образование электромагнитного поля.
Известно 2 вида реактивного сопротивления.
Индуктивное сопротивление - это сопротивление, возникающее в результате явления самоиндукции.

Где ω - циклическая частота тока,
Емкостное сопротивление - это сопротивление, которое оказывает переменному току конденсатор.

§ Генератором переменного тока называется электротехническое устройство, предназначенное для преобразования механической энергии в энергию переменного тока.
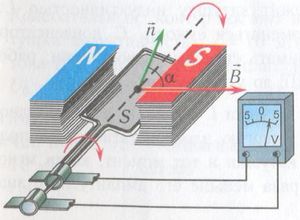
Основными частями генератора являются (рис. 1):
§ индуктор — электромагнит или постоянный магнит, который создает магнитное поле;
§ якорь — обмотка, в которой индуцируется переменная ЭДС;
§ коллектор со щетками — устройство, посредством которого снимается с вращающихся частей или подается по ним ток.

Неподвижная часть генератора называется статором, а подвижная — ротором. В зависимости от конструкции генератора его якорь может быть как ротором, так и статором. При получении переменных токов большой мощности якорь обычно делают неподвижным, чтобы упростить схему передачи тока в промышленную сеть.
Мощные генераторы вырабатывают напряжение 15-20 кВ и обладают КПД 97-98 %.
Принцип действия
Принцип действия генератора переменного тока основан на явлении электромагнитной индукции.
Пусть проводящая рамка площадью S вращается с угловой скоростью ω вокруг оси, расположенной в ее плоскости перпендикулярно однородному магнитному полю индукцией B⃗ (см. рис. 1).
При равномерном вращении рамки угол α между направлениями вектора индукции магнитного поля B⃗ и нормали к плоскости рамки n⃗ меняется со временем по линейному закону. Если в момент времени t = 0 угол α0 = 0 (см. рис. 1), то
α=ω⋅t=2π⋅ν⋅t,
где ω — угловая скорость вращения рамки, ν — частота ее вращения.
В этом случае магнитный поток, пронизывающий рамку будет изменяться следующим образом
Φ(t)=B⋅S⋅cosα=B⋅S⋅cosω⋅t.
Тогда согласно закону Фарадея индуцируется ЭДС индукции
e=−Φ′(t)=B⋅S⋅ω⋅sinω⋅t=Em⋅sinω⋅t.
Подчеркнем, что ток в цепи проходит в одном направлении в течение полуоборота рамки, а затем меняет направление на противоположное, которое также остается неизменным в течение следующего полуоборота.
Действующие значения силы тока и напряжения
§ Действующим (эффективным) значением силы переменного тока называется сила такого постоянного тока, который, проходя по цепи, выделяет в единицу времени такое же количество теплоты, что и данный переменный ток.
Обозначается буквой I.
§ Действующим (эффективным) значением напряжения переменного тока называется напряжение такого постоянного тока, который, проходя по цепи, выделяет в единицу времени такое же количество теплоты, что и данный переменный ток.
Обозначается буквой U.
В контактной сети электрифицированных ж. д. используется постоянный электрический ток напряжением 3 кВили переменный однофазный ток промышленной частоты напряжением 25 кВ.
При питании переменным током усложняется конструкция подвижного состава, но значительно упрощаются устройства энергоснабжения электрических железных дорог, увеличивается расстояние между тяговыми подстанциями при тех же потерях до 50 км (20—25 км при постоянном токе), снижается стоимость строительства контактной сети до 10%, в 2,5 раза меньше расход меди.
Билет № 11
1 Механическая работа. Мощность.
Если действующая на тело сила F вызывает его перемещение s, то действие этой силы характеризуется величиной, называемой механической работой (или, сокращенно, просто работой).
Механической работой А называют скалярную величину, равную произведению модуля силы F, действующей на тело, и модуля перемещения s, совершаемого телом в направлении действия этой силы, т. е.
В случае, описываемом формулой (3.9), направление перемещения тела совпадает с направлением силы. Однако чаще встречаются случаи, когда сила и перемещение составляют между собой угол, не равный нулю или α. (рис. 30)
А=Fsсоsα. (3.10)
Таким образом, в общем случае механическая работа равна произведению модуля силы и модуля перемещения на косинус угла между направлениями силы и перемещения. Работа силы, направленной вдоль перемещения тела, положительна, а силы, направленной против перемещения тела, - отрицательна. По формулам (3.9) и (3.10) вычисляют работу постоянной силы. Единицу механической работы устанавливают из формулы (3.9). В СИ за единицу работы принята работа силы 1 Н при перемещении точки ее приложения на 1 м. Эта единица имеет наименование джоуль (Дж):
1 Дж = 1Н·1м.

Мощность-это величина, характеризующая быстроту совершения работы. Мощностью N называют величину, равную отношению работы А к промежутку времени t, в течение которого эта работа была совершена:
Из формулы (3.11) следует, что в СИ единицей мощности является 1 Дж/с (джоуль в секунду). Эту единицу иначе называют ватт (Вт), 1 Вт= 1 Дж/с.
Связь между мощностью и скоростью при равномерном движении найдем, подставив (3.10) в (3.11):
(Эта формула справедлива и для переменного движения, если под N понимать мгновенную мощность, а под V - мгновенную скорость). Если направление силы совпадает с направлением перемещения, то cosα=1 и N=F·v. Из последней формулы следует, что
Из этих формул видно, что при постоянной мощности двигателя скорость движения обратно пропорциональна силе тяги и наоборот. На этом основан принцип действия коробки скоростей (коробки перемены передач) различных транспортных средств.
При прохождении тока в электрической цепи он подвергается противодействию ее отдельных частей, которое в электротехнике называется сопротивлением. Это приводит к потере части мощности. Чтобы правильно рассчитать параметры электрической цепи, нужно учитывать природу сопротивления и знать, в чем заключается действие различных его видов.

Что такое сопротивление
Ток, протекая через провода и различные радиодетали, тратит свою энергию. Это явление количественно выражается величиной сопротивления. В электротехнике его разделяют на активное и реактивное сопротивление. В первом случае при прохождении тока часть его энергии превращается в тепловой вид, а иногда и в другие (например, проявляется в химических реакциях). Величина активного сопротивления зависит от частоты переменного электротока и возрастает с ее увеличением.

Второй тип сопротивления имеет более сложную природу и возникает в момент включения или выключения потребителя электроэнергии в сеть переменного или постоянного тока. В цепи с реактивным сопротивлением энергия электрического тока частично превращается в другую форму, а затем переходит обратно, то есть, наблюдается периодический колебательный процесс. Полное сопротивление цепи включает в себя активный и реактивный типы, которые учитываются по особым правилам.
Виды сопротивления
В электротехнике рассматривается активное электрическое сопротивление, а также две разновидности реактивного: индуктивное и ёмкостное.

Активное сопротивление
Можно представить себе электрическую цепь, в которой к клеммам батарейки через провод последовательно присоединены резистор и электрическая лампочка. Если замкнуть провода, лампочка загорится. Можно использовать вольтметр или мультиметр в соответствующем режиме работы, с помощью которых измеряется разность потенциалов между двумя точками цепи.
Измерив напряжение между клеммами и сравнив его с тем, которое имеется на проводах подсоединённых к лампочке, можно увидеть, что последнее меньше. Это связано с падением напряжения на впаянной в цепь радиодетали. Последняя оказывает противодействие электрическому току, затрудняя его прохождение.
Активным сопротивлением обладает каждая деталь, через которую проходит ток. У металлических проводов оно очень маленькое. Чтобы узнать величину сопротивления радиодетали, нужно изучить обозначение на ее корпусе. Если из рассматриваемой электроцепи убрать резистор, то сила тока, проходящего через лампочку, увеличится.
Формула для расчета активного сопротивления соответствует закону Ома:
- R — величина активного сопротивления между двумя точками в цепи;
- U — напряжение или разность потенциалов между ними;
- I — сила тока на рассматриваемом участке цепи.
Для расчета активного сопротивления проводника формула будет другая:

где K-коэффициент поверхностного эффекта, который равен 1,
- l — длина проводника,
- s — площадь поперечного сечения,
- p — “ро” удельное сопротивление.
Сопротивление принято измерять в Омах. Оно существенно зависит от формы и размеров объекта, через который протекает ток: сечения, длины, материала, а также от температуры. Действие активного сопротивления уменьшает энергию электрического тока, превращая её в другие формы (преимущественно в тепловую).

Реактивное сопротивление
Этот вид возникает тогда, когда переменный ток проходит сквозь элемент, который обладает индуктивностью или емкостью. Основной особенностью реактивного сопротивления является преобразование электрической энергии в другую форму в прямом и обратном направлениях. Часто это происходит циклически. Реактивное сопротивление проявляется только при изменениях силы тока и напряжения. Существует два его вида: индуктивное и емкостное.
Индуктивное сопротивление
При увеличении силы тока порождается магнитное поле, обладающее различными характеристиками. Наиболее важной из них является индуктивность. Магнитное поле, в свою очередь, воздействует на проводник, по которому протекает ток. Влияние является противоположным направлению изменения тока. То есть, если сила тока увеличилась, то магнитное поле будет уменьшать его, и наоборот, если снизилась, то поле усилит его. Когда ток не меняется, реактивное сопротивление катушки индуктивности будет равно нулю.
Индуктивное сопротивление зависит от частоты тока. Чем она выше, тем выше скорость изменения данного параметра. Это значит, что будет образовано более сильное магнитное поле. Возникающая при этом ЭДС препятствует изменению электрического тока.

Расчет реактивного индуктивного сопротивления осуществляется по такой формуле:
XL = L×w = L×2π×f, где буквами обозначаются:
При синусоидальном изменении напряжения сила тока будет меняться, отставая от него по фазе. Поэтому реактивное сопротивление трансформатора существенно зависит от его индуктивности.

Емкостное сопротивление
Оно имеет иную природу, чем индуктивное. Это понятие удобно проиллюстрировать на примере электрической цепи, состоящей из источника питания, клеммы которого соединены с обкладками конденсатора. Сразу после подключения на них будет постепенно накапливаться заряд, создавая ток в цепи.
После достижения предельной величины, которая определяется ёмкостью детали, ток не будет проходить по цепи. Если после этого отключить провода от клемм, а затем последние соединить, то между ними начнётся перемещение зарядов до тех пор, пока разность потенциалов станет равной нулю.
Если к конденсатору подключить источник переменного тока, то будет происходить следующее. С увеличением разности потенциалов заряд на обкладках конденсатора будет расти. Когда напряжение перейдёт в фазу уменьшения, накопленный заряд начнёт стекать с них, образуя ток противоположного направления. Затем разность потенциалов станет отрицательной, но по абсолютной величине будет расти до максимального значения. При этом конденсатор начнет вновь заряжаться, но при этом знак поступающих зарядов будет не такой, который был раньше.

Когда напряжение начнёт увеличиваться (уменьшаясь по абсолютной величине), заряд с обкладок конденсатора будет стекать. Когда разность потенциалов у источника достигнет нуля и продолжит увеличиваться, начнётся новый цикл изменений.
На каждом этапе описанной ситуации ток с обкладок конденсатора будет иметь направление противоположное тому, которое порождается переменной разностью потенциалов источника питания.
Происходящее таким образом уменьшение силы тока представляет собой физический смысл ёмкостного сопротивления. Оно обозначается буквами ХС и рассчитывается по формуле:
XС = 1/(w×C) = 1/(2π×f×C), где
В рассматриваемом случае изменения тока отстают от напряжения.
Полное сопротивление
При использовании нескольких разновидностей важно знать, как они сочетаются между собой. Активное сопротивление присутствует в любых схемах. Оно способствует превращению части электрической энергии в нагрев. Реактивное сопротивление возникает лишь в цепи переменного тока. Чтобы определить его величину, необходимо из индуктивного вычесть ёмкостное. Эта характеристика показывает энергию, которая пульсирует в цепи, переходя из одной формы в другую.

Полное сопротивление представляет собой сумму активного и реактивного сопротивления в цепи переменного тока, но такое сложение необходимо выполнять особым образом. Для этого нужно начертить прямоугольный треугольник, катеты в котором должны иметь длину, равную величине активного и реактивного сопротивлений соответственно.

Длина гипотенузы будет численно выражать полное сопротивление электрической цепи. Для его определения используется правило, говорящее о том, что сумма квадратов катетов равна квадрату гипотенузы. Это правило называют теоремой Пифагора. Следовательно, формула, с помощью которой можно найти полное сопротивление, выглядит так:
- Z — полное сопротивление;
- R — величина активной составляющей;
- XL и XC — значение индуктивного и емкостного параметра соответственно.
Следовательно, при расчёте полного сопротивления или импеданса нужно учитывать, что такое ёмкость и индуктивность и как они могут проявляться в электрических схемах. Эти величины называются еще паразитными, так как они могут отрицательно влиять на работу электроприбора. Их возникновение относят к непредсказуемым факторам. При этом емкостным или индуктивным сопротивлением, имеющим небольшое значение, при выполнении расчетов можно пренебречь.
Заключение
Как видим, при расчете электрической цепи необходимо учитывать и активное, и реактивное, и полное сопротивление. Они отличаются друг от друга не только названием. Физика этих сопротивлений также разная. Если под воздействием активного сопротивления электроэнергия превращается в другой вид и поступает в окружающую среду, то реактивное возвращает ее обратно в сеть. Без понятия о сопротивлении и знания формул расчета невозможно конструировать электросхемы.
В цепях переменного тока сопротивления разделяют на активные и реактивные.
В активных сопротивлениях, включенных в цепь переменного тока, электрическая энергия преобразуется в тепловую, в реактивных сопротивлениях электрическая энергия, вырабатываемая источником, не расходуется.
Если не учитывать взаимное влияние отдельных элементов электрической цепи, то в общем случае электрическая цепь синусоидального тока может быть представлена тремя пассивными элементами: активным сопротивлением R, индуктивностью L и емкостью C.
Электрические машины постоянного тока
Принцип действия генератора постоянного тока.
Упрощенная модель генератора постоянного тока:

между полюсами N и S магнита находится вращающаяся часть генератора - якорь, вал которого механически связан с приводным двигателем.
В двух продольных пазах на сердечнике якоря расположена обмотка в виде одного витка, концы которого присоединены к двум медным изолированным полукольцам, образующих простейший коллектор.
Коллектор – механический преобразователь переменного тока в постоянный и наоборот.
На поверхность коллектора наложены щетки А и В, осуществляющие скользящий контакт с коллектором и связывающие генератор с внешней цепью.
В процессе работы генератора якорь вращается и виток занимает разное пространственное положение, поэтому в витке наводится переменная э.д.с., мгновенное значение которой e=Blvsinα.

При замыкании внешней цепи через виток будет протекать синусоидальный ток, который посредством коллектора и щеток преобразуется в пульсирующий ток во внешней цепи, то есть ток неизменный по направлению.
При указанном положении витка направление тока в нем от щетки А к щетке В, при повороте витка на 180 0 , направление тока в витке измениться на противоположное, однако полярность щеток, а, следовательно, направление тока во внешней цепи останутся неизменными, так как в тот момент, когда ток в витке меняет свое направление, происходит смена коллекторных пластин под щетками. Таким образом под щеткой А всегда находится пластина, соединенная с проводником расположенным под северным полюсом, а под щеткой В - пластина, соединенная с проводником расположенным под южным полюсом. То есть, полярность щеток остается неизменной.
Для ослабления пульсации тока во внешней цепи увеличивают число витков в обмотке якоря при их равномерном распределении по поверхности якоря и соответствующем числе коллекторных пластин. Уже при 16 витках и 16 коллекторных пластинах ток, практически, считается постоянным.
Основные уравнения генератора.
В процессе работы генератора постоянного тока индуцируется э.д.с. Е. При подключении к генератору нагрузки в цепи якоря возникает ток, а на выводах генератора устанавливается напряжение, определяемое уравнением:
Якорь генератора приводится во вращение приводным двигателем, который создает на валу генератора вращающий момент М. Если генератор работает на х.х. (I =0),то для вращения его якоря нужен сравнительно небольшой момент х.х. М0. Этот момент обусловлен силами трения и вихревыми токами.
При работе нагруженного генератора в проводах обмотки якоря появляется ток, который, взаимодействуя с магнитным полем возбуждения, создает на якоре тормозной момент Мт.
М=М0+Мт – уравнение моментов для генератора.
Принцип работы двигателя постоянного тока.

В соответствии с принципом обратимости электрических машин упрощенная модель генератора постоянного тока может быть использована в качестве двигателя. Для этого на щетки нужно подать напряжение от источника постоянного тока.
Например, если на щетку А подать +, а на щетку В -, то в обмотке возникнет ток I. В результате взаимодействия этого тока с магнитным полем возбуждения, появятся электромагнитные силы Fэм, создающие на якоре вращающий момент М.
После поворота якоря на 180 0 электромагнитные силы не изменят своего направления, так как одновременно с переходом каждого проводника обмотки якоря из зоны одного магнитного полюса в зону другого полюса, в этих проводниках посредством коллектора и щеток меняется направление тока.
Упрощенная модель не обеспечивает двигателю устойчивой работы, так как при прохождении проводниками обмотки якоря геометрической нейтрали 00 | , электромагнитные силы раны нулю (В=0). Однако при увеличении числа проводников обмотки якоря и числа коллекторных пластин вращение якоря двигателя становится устойчивым и равномерным.
Основные уравнения двигателя.
При подключении двигателя постоянного тока к источнику питания, через обмотку возбуждения и обмотку якоря будет протекать ток. Взаимодействие поля якоря с полем возбуждения создает на якоре электромагнитный момент М, который является вращающим.
Вращающий момент определяется по формуле
где См – коэффициент, зависящий от конструктивных параметров машины.
В процессе работы якорь вращается, в обмотке наводится э.д.с. Еа, которая направлена против тока Iа, поэтому ее называют противо-э.д.с.
где Се – конструктивная постоянная для данной машины.
Напряжение, приложенное к зажимам якоря двигателя, должно уравновешивать противо-э.д.с. и компенсировать падение напряжения на внутреннем сопротивлении цепи якоря:
Ra - сопротивление обмотки якоря; Rд - сопротивление обмотки добавочных полюсов; Rко - сопротивление компенсационной обмотки; Rс - сопротивление последовательной обмотки возбуждения; Rщ - сопротивление переходного щеточного контакта.

Частоту вращения двигателя можно регулировать: изменением магнитного потока, изменяя ток возбуждения; изменением питающего напряжения U; включением добавочного сопротивления в цепь якоря.
Если требуется изменить направление движения двигателя, то необходимо изменить направление электромагнитного момента М, действующего на якорь. Это можно осуществить изменением тока в обмотке якоря Ia или путем изменения направления магнитного потока Ф.
Чтобы двигатель вращался с постоянной частотой n, развиваемый им вращающий мрмент М должен быть равным создаваемому нагрузкой тормозному моменту Мт М=Мт=См*Ф*Iа
Если равенство нарушается, то частота вращения увеличивается или уменьшается до тех пор пока вращающий момент не будет уравновешен тормозным.
Электрические машины переменного тока
Электрические машины переменного тока могут быть однофазными и многофазными. Наиболее широкое распространение нашли синхронные и асинхронные машины, а также коллекторные машины переменного тока.
Синхронные электрические машины
применяются в качестве генераторов и двигателей.
Синхронные двигатели используют для мощных электроприводов, а также для микроприводов в устройствах, требующих поддержания строгого постоянства частоты вращения.

Наибольшее распространение получили трехфазные генераторы с неподвижным якорем. Обмотка якоря укладывается в пазах статора, а ротор представляет собой электромагнит, к обмотке которого подводится постоянный ток через контактные кольца и щетки. Ротор при этом может быть явнополюсным и неявнополюсным.
В машинах с относительно малой частотой вращения (гидрогенераторы) ротор имеет явно выраженные полюсы, равномерно расположенные по его окружности. Полюс состоит из сердечника, полюсного наконечника и обмотки возбуждения.
Высокоскоростные машины (турбогенераторы) снабжены роторами с неявно выраженными полюсами. Сердечники, которых обычно изготавливаются из цельных поковок, на поверхности которых фрезеруются пазы. После укладки обмоток возбуждения на роторе, пазы его забивают клиньями, а лобовые соединения обмотки возбуждения укрепляют стальными бандажами.
При работе генератора на холостом ходу магнитный поток возбуждения индуцирует в трехфазной обмотке статора э.д.с.
Для нормальной работы любого приемника электрической энергии требуется постоянное напряжение сети. Регулировать напряжение генератора можно изменением частоты вращения или магнитного потока возбуждения. Для изменения потока возбуждения в цепь обмотки включают регулировочный реостат или автоматический регулятор напряжения (на дизельных или вагонных генераторах).
Асинхронные машины переменного тока
чаще всего используются в качестве двигателей. Принцип действия таких машин основан на использовании вращающегося магнитного поля.
Вращающееся магнитное поле

можно получить с помощью двух одинаковых катушек, питаемых переменным током, если их оси сдвинуты в пространстве относительно друг друга на угол 90 0 , а также с помощью трех одинаковых катушек, оси которых сдвинуты в пространстве на угол 120 0 .
Устройство асинхронного двигателя.
Сердечник статора набирается из изолированных стальных пластин с пазами. В продольные пазы статора укладывают его обмотки, которые соединяют звездой или треугольником, что дает возможность включать в сеть с двумя различными линейными напряжениями (380/220). Сердечник статора запрессовывают в литой остов. Сердечник ротора также набирают из изолированных стальных пластин, для уменьшения потерь на вихревые токи. Сердечник крепят на валу машины. В продольные пазы укладывают проводники обмотки ротора.
В зависимости от типа обмотки асинхронные машины могут быть с фазным и короткозамкнутым роторами. Короткозамкнутая обмотка ротора выполняется по типу беличьего колеса: в пазах ротора укладывают без изоляции (напряжение в короткозамкнутом роторе равно нулю) массивные стержни, соединенные на торцах кольцами. Часто короткозамкнутую обмотку изготавливают из алюминия. Алюминий в горячем состоянии заливают в пазы ротора под давлением. Такая обмотка всегда замкнута накоротко, и включение сопротивления в нее не возможно. Обычно двигатели имеют вентиляторы насаженные на вал ротора. Двигатели короткозамкнутыми роторами проще и надежнее в эксплуатации, значительно дешевле, чем двигатели с фазным ротором. Однако, сравнительно малый пусковой момент и большой пусковой ток не позволяют их использовать для привода механизмов, которые должны пускаться в ход под большой нагрузкой.
Для улучшения пускового момента применяют двойную беличью клетку или глубокие пазы. В начальный момент пуска ток выталкивается в верхнюю часть паза (наружную обмотку), что объясняется действием э.д.с. самоиндукции, которая сильно сказывается при неподвижном роторе. По мере возрастания частоты вращения ротора ток, главным образом, будет проходить через внутреннюю клетку (нижнюю часть паза).
Недостатком асинхронного двигателя является его низкий коэффициент мощности: при полной нагрузке – 0,85-0,9; при недогрузке – 0,2-0,3. Низкий коэффициент мощности объясняется большим потреблением реактивной мощности для возбуждения магнитного поля.
Асинхронные двигатели с фазным ротором
применяются для привода таких механизмов, которые пускаются в ход под нагрузкой (лифты, краны). Двигатель должен развивать при пуске максимальный пусковой момент, что достигается с помощью пускового реостата, имеющего несколько позиций. На роторе асинхронного двигателя с фазным ротором расположена трехфазная обмотка, состоящая из трех (шести, девяти) катушек сдвинутых одна относительно к другой на 120 0 (60 0 и т.д.). Число полюсов обмоток ротора и статора берутся одинаковыми. Обмотку ротора обычно соединяют звездой. Концы присоединяют к трем кольцам, к которым посредством щеток подключают трехфазный пусковой реостат.
Работа асинхронного двигателя.
В обмотке статора асинхронного двигателя при прохождении переменного тока возбуждается вращающееся магнитное поле, которое, пересекая проводники обмотки ротора, наводит в них переменную э.д.с. Так как, обмотка ротора замкнута, то наведенная э.д.с. вызывает в роторе ток. В результате взаимодействия тока ротора с магнитным полем статора возникает электромагнитный момент M=CФmI2cosφ.
В рабочем режиме ротор двигателя вращается с частотой n2, которая меньше частоты поля статора n1, вращающегося в ту же сторону, что и ротор. Поэтому поле, имеющее большую частоту, скользит относительно ротора с частотой, равной разности частот поля статора и ротора, т.е. ns= n1-n2.
Относительное отставание ротора от вращающегося магнитного поля статора характеризуется скольжением S.
Скольжение представляет собой отношение частоты вращения магнитного поля статора относительно вращающегося ротора к частоте поля статора.
Читайте также: