
Работа потенциальных сил кратко
Обновлено: 02.07.2024
Часто сталкиваюсь с тем, что дети не верят в то, что могут учиться и научиться, считают, что учиться очень трудно.
Урок 11. Лекция 11. Работа. Мощность. Энергия. Закон сохранения энергии
Энергетические характеристики движения вводятся на основе понятия механической работы или работы силы.
Если на тело действует сила и тело под действием этой силы перемещается, то говорят, что сила совершает работу.
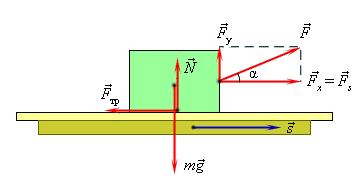
Механическая работа – это скалярная величина, равная произведению модуля силы, действующей на тело, на модуль перемещения и на косинус угла между вектором силы и вектором перемещения (или скорости).
Работа является скалярной величиной. Она может быть как положительна (0° ≤ α N=A/t
В Международной системе (СИ) единица мощности называется ватт (Вт). Ватт равен мощности силы, совершающей работу в 1 Дж за время 1 с.
Внесистемная единица мощности 1 л.с.=735 Вт
Связь между мощностью и скоростью при равномерном движении:
N=A/t так как A=FScosα тогда N=(FScosα)/t, но S/t = v следовательно
N=Fvcos α
В технике используются единицы работы и мощности:
1 Вт·с = 1 Дж; 1Вт·ч = 3,6·10 3 Дж; 1кВт·ч = 3,6·10 6 Дж
Если тело способно совершить работу, то говорят, что оно обладает энергией.
Механическая энергия тела – это скалярная величина, равная максимальной работе, которая может быть совершена в данных условиях.
Обозначается Е Единица энергии в СИ [1Дж = 1Н*м]
Механическая работа есть мера изменения энергии в различных процессах А = ΔЕ.
Различают два вида механической энергии – кинетическая Ек и потенциальная Еp энергия.
Полная механическая энергия тела равна сумме его кинетической и потенциальной энергий
Е = Ек + Еp
Кинетическая энергия – это энергия тела, обусловленная его движением.
Физическая величина, равная половине произведения массы тела на квадрат его скорости, называется кинетической энергией тела:


Кинетическая энергия – это энергия движения. Кинетическая энергия тела массой m, движущегося со скоростью равна работе, которую должна совершить сила, приложенная к покоящемуся телу, чтобы сообщить ему эту скорость:

Если тело движется со скоростью , то для его полной остановки необходимо совершить работу
Наряду с кинетической энергией или энергией движения в физике важную роль играет понятиепотенциальной энергии или энергии взаимодействия тел.
Потенциальная энергия – энергия тела, обусловленная взаимным расположением взаимодействующих между собой тел или частей одного тела.
Понятие потенциальной энергии можно ввести только для сил, работа которых не зависит от траектории движения тела и определяется только начальным и конечным положениями. Такие силы называются консервативными. Работа консервативных сил на замкнутой траектории равна нулю.
Свойством консервативности обладают сила тяжести и сила упругости. Для этих сил можно ввести понятие потенциальной энергии.
Потенциальная энергия тела в поле силы тяжести (потенциальная энергия тела, поднятого над землёй):
Ep = mgh
Она равна работе, которую совершает сила тяжести при опускании тела на нулевой уровень.
Понятие потенциальной энергии можно ввести и для упругой силы. Эта сила также обладает свойством консервативности. Растягивая (или сжимая) пружину, мы можем делать это различными способами.
Можно просто удлинить пружину на величину x, или сначала удлинить ее на 2x, а затем уменьшить удлинение до значения x и т. д. Во всех этих случаях упругая сила совершает одну и ту же работу, которая зависит только от удлинения пружины x в конечном состоянии, если первоначально пружина была недеформирована. Эта работа равна работе внешней силы A, взятой с противоположным знаком :
где k – жесткость пружины.
Растянутая (или сжатая) пружина способна привести в движение прикрепленное к ней тело, то есть сообщить этому телу кинетическую энергию. Следовательно, такая пружина обладает запасом энергии. Потенциальной энергией пружины (или любого упруго деформированного тела) называют величину

Потенциальная энергия упруго деформированного тела равна работе силы упругости при переходе из данного состояния в состояние с нулевой деформацией.
Если в начальном состоянии пружина уже была деформирована, а ее удлинение было равно x1, тогда при переходе в новое состояние с удлинением x2 сила упругости совершит работу, равную изменению потенциальной энергии, взятому с противоположным знаком:
Потенциальная энергия при упругой деформации – это энергия взаимодействия отдельных частей тела между собой силами упругости.
Если тела, составляющие замкнутую механическую систему, взаимодействуют между собой только силами тяготения и упругости, то работа этих сил равна изменению потенциальной энергии тел, взятому с противоположным знаком:
По теореме о кинетической энергии эта работа равна изменению кинетической энергии тел:
Следовательно Ek2 – Ek1 = –(Ep2 – Ep1) или Ek1 + Ep1 = Ek2 + Ep2.
Сумма кинетической и потенциальной энергии тел, составляющих замкнутую систему и взаимодействующих между собой силами тяготения и силами упругости, остается неизменной.
Это утверждение выражает закон сохранения энергии в механических процессах. Он является следствием законов Ньютона.
Сумму E = Ek + Ep называют полной механической энергией.
Полная механическая энергия замкнутой системы тел, взаимодействующих между собой только консервативными силами, при любых движениях этих тел не изменяется. Происходят лишь взаимные превращения потенциальной энергии тел в их кинетическую энергию, и наоборот, или переход энергии от одного тела к другому.
Е = Ек + Еp = const
Закон сохранения механической энергии выполняется только тогда, когда тела в замкнутой системе взаимодействуют между собой консервативными силами, то есть силами, для которых можно ввести понятие потенциальной энергии.
В реальных условиях практически всегда на движущиеся тела наряду с силами тяготения, силами упругости и другими консервативными силами действуют силы трения или силы сопротивления среды.
Сила трения не является консервативной. Работа силы трения зависит от длины пути.
Если между телами, составляющими замкнутую систему, действуют силы трения, то механическая энергия не сохраняется. Часть механической энергии превращается во внутреннюю энергию тел (нагревание).

Из этого видеоурока ребята узнают, как найти работу силы тяжести и силы упругости. Познакомятся с консервативными силами и их основным свойством. А также узнают, что такое нулевой уровень потенциальной энергии и как он выбирается.
В данный момент вы не можете посмотреть или раздать видеоурок ученикам
Чтобы получить доступ к этому и другим видеоурокам комплекта, вам нужно добавить его в личный кабинет, приобретя в каталоге.
Получите невероятные возможности



Конспект урока "Работа потенциальных сил"
Итак, мы уже с вами знаем, что любое состояние тела (или системы тел) характеризуется его координатами и скоростью. И если изменяется хотя бы одна из этих величин, то говорят, что изменилось механическое состояние тела. Количественно механическое состояние системы и её изменение характеризуется механической энергией. Напомним, что механическая энергия — это физическая величина, являющаяся функцией состояния системы и характеризующая её способность совершать работу.
Так же мы с вами говорили о том, что в механике принято выделять два вида механической энергии: кинетическую и потенциальную.
Кинетической энергией обладает любое движущееся тело. А её изменение равно работе равнодействующей всех сил, действующих на него. При этом не важно, какие силы действуют на тело: сила упругости, сила трения или сила тяжести. Теорема о кинетической энергии справедлива всегда.
Потенциальная энергия — это энергия, обусловленная взаимным расположением тел или частей тела друг относительно друга и характером сил взаимодействия между ними.
Её изменение тоже равно работе. Однако эта работа будет зависть от того, какие силы действуют на тело.
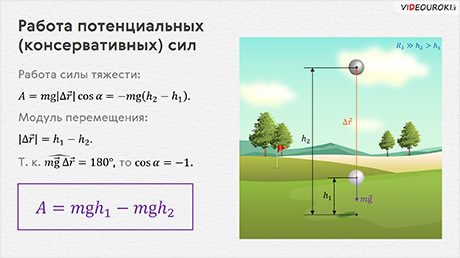
Итак, пусть у нас есть материальная точка массой т, которая под действием силы тяжести перемещается с высоты h1 до высоты h2. При этом будем считать, что данные высоты намного меньше радиуса Земли, чтобы действующая на материальную точку сила тяжести была постоянной.

Тогда работа, совершаемая этой силой при перемещении тела с одного уровня на другой, будет равна произведению модуля вектора силы тяжести на модуль вектора перемещения точки и на косинус угла между этими двумя векторами.
A = mg|Δr|cosα.
A = mg(h1 – h2) = mgh1 – mgh2.
Теперь давайте с вами найдём работу силы тяжести при подъёме материальной точки с высоты h1 до высоты h2 над поверхностью Земли.

Запишем формулу для работы силы тяжести в общем виде:
A = mg|Δr|cosα.
Модуль перемещения, как и в предыдущем случае, равен разности в конечном и начальном положениях точки:
Δr = h2 – h1.
Но теперь векторы силы тяжести и перемещения направлены в противоположные стороны. Значит, угол между этими двумя векторами составляет 180 о . А сos180 o = –1. Перепишем формулу для работы с учётом наших рассуждений:
A = mgh1 – mgh2.
Как видим, мы с вами получили точно такое же выражение для работы силы тяжести, что и в предыдущем случае.
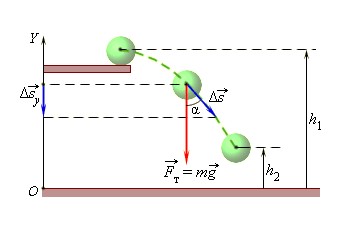
И давайте ещё раз определим работу силы тяжести, но для случая, когда тело переходит с одной высоты на другую не по вертикали.

Обозначив угол между направлением вектора силы и вектора перемещения через α, запишем формулу для работы силы тяжести в общем виде:
A = mg|Δr|cosα.
Для определения перемещения точки воспользуемся получившимся прямоугольником треугольником ΔMKN, в котором гипотенуза — это искомое перемещение, а один из острых углов — это наш угол между вектором силы и вектором перемещения. Тогда очевидно, что произведение модуля вектора перемещения на косинус угла альфа равно длине прилежащего к углу катета МК:
MK = |Δr|cosα.
С другой же стороны
Тогда получается, что работа силы тяжести вновь определяется той же формулой, что и в предыдущих двух случаях:
A = mgh1 – mgh2.
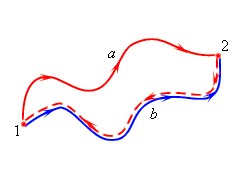
Отсюда следует главный вывод о том, что работа силы тяжести не зависит от того, по какой траектории движется материальная точка и всегда равна произведению модуля силы тяжести на разность высот в начальном и конечном положениях точки.
Тогда становится очевидным, что в случае движения точки по замкнутой траектории работа силы тяжести будет равна нулю, так как начальное и конечное положения точки совпадают.
Силы, работа которых не зависит от формы траектории точки приложения силы и которые на замкнутой траектории равны нулю, называются потенциальными или консервативными силами. Значит, сила тяжести — это консервативная сила.
Теперь давайте найдём формулу для работы, совершаемой силой упругости. Для этого рассмотрим механическую систему, состоящую из пружины и прикреплённого к ней шарика, через который проде́т тонкий металлический стержень, по которому шарик может свободно скользить практически без трения. Так как действующая на шар сила тяжести уравновешивается силой нормальной реакции стержня, то вся система находится в состоянии равновесия.

Направим координатную ось ОХ параллельно стержню, а за начало отсчёта примем центр тяжести шара в положении равновесия. Теперь отведём шар от положения равновесия на некоторое расстояние. Пружина при этом растянется и в ней возникнет сила упругости, модуль которой будет определяться на основании закона Гука:
Если мы теперь отпустим шарик, то он за счёт совершения работы силой упругости придёт в движение. Предположим, что шар переместился так, что его координата стала равной x2, а модуль силы упругости — F2 = kx2. Тогда модуль перемещения шарика будет равен разности между его начальной и конечной координатой:
Так как сила упругости является переменной силой, то для нахождения совершённой ею работы воспользуемся графиком зависимости модуля силы упругости от координаты шара.
Как нам уже известно, работа силы численно равна площади под графиком силы. В нашем случае это площадь трапеции, основаниями которой являются силы упругости пружины в начальном и конечном состояниях, а высота — это перемещение тела:


Из полученной нами формулы следует, что работа силы упругости пружины зависит только от координат её конца в начальном и конечном состояниях. То есть она не зависит от формы траектории. Тогда становится очевидным, что если начальное и конечное состояния пружины совпадают, то работа силы упругости будет равна нулю. Следовательно, сила упругости, как и сила тяжести, является потенциальной (или консервативной) силой.
На прошлом уроке мы с вами ввели понятие потенциальной энергии, которая определяется взаимным расположением тел или частей тела друг относительно друга.
Введя понятие потенциальной энергии, мы с вами получаем возможность выразить работу любых консервативных сил через изменение потенциальной энергии. Напомним, что под изменением величины понимают разность между её конечным и начальным значениями:
Тогда для работы силы тяжести и силы упругости можно записать, что изменение потенциальной энергии материальной точки равно работе консервативной силы, взятой с обратным знаком:
Таким образом, работа консервативных сил определяет не саму потенциальную энергию точки, а её изменение. И лишь это изменение в механике имеет физический смысл. Поэтому можно произвольно выбрать состояние системы, в котором её потенциальная энергия считается равной нулю. Этому состоянию соответствует нулевой уровень отсчёта потенциальной энергии. Его выбор диктуется условиями конкретной задачи.
Для примера решим с вами такую задачу. Бревно цилиндрической формы массой 400 кг, длиной 4 м и диаметром основания 50 см лежит на земле. Какую минимальную работу необходимо совершить, чтобы это бревно поставить в вертикальное положение? Ускорение свободного падения примем равным 10 м/с 2 .
Энергия - важнейшее понятие в механике. Что такое энергия. Существует множество определений, и вот одно из них.
Что такое энергия?
Энергия - это способность тела совершать работу.
Кинетическая энергия
Рассмотрим тело, которое двигалось под действием каких-то сил изменило свою скорость с v 1 → до v 2 → . В этом случае силы, действующие на тело, совершили определенную работу A .
Работа всех сил, действующих на тело, равна работе равнодействующей силы.
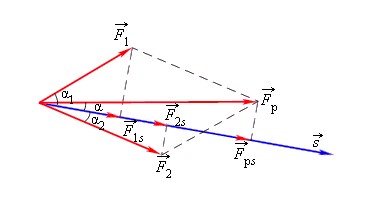
F р → = F 1 → + F 2 →
A = F 1 · s · cos α 1 + F 2 · s · cos α 2 = F р cos α .
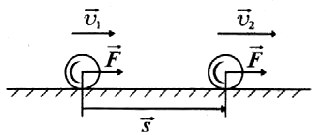
Установим связь между изменением скорости тела и работой, совершенной действующими на тело силами. Для простоты будем считать, что на тело действует одна сила F → , направленная вдоль прямой линии. Под действием этой силы тело движется равноускоренно и прямолинейно. В этом случае векторы F → , v → , a → , s → совпадают по направлению и их можно рассматривать как алгебраические величины.
Работа силы F → равна A = F s . Перемещение тела выражается формулой s = v 2 2 - v 1 2 2 a . Отсюда:
A = F s = F · v 2 2 - v 1 2 2 a = m a · v 2 2 - v 1 2 2 a
A = m v 2 2 - m v 1 2 2 = m v 2 2 2 - m v 1 2 2 .
Как видим, работа, совершенная силой, пропорционально изменению квадрата скорости тела.
Определение. Кинетическая энергия
Кинетическая энергия тела равна половине произведения массы тела на квадрат его скорости.
Кинетическая энергия - энергия движения тела. При нулевой скорости она равна нулю.
Теорема о кинетической энергии
Вновь обратимся к рассмотренному примеру и сформулируем теорему о кинетической энергии тела.
Теорема о кинетической энергии
Работа приложенной к телу силы равна изменению кинетической энергии тела. Данное утверждение справедливо и тогда, когда тело движется под действием изменяющейся по модулю и направлению силы.
A = E K 2 - E K 1 .
Таким образом, кинетическая энергия тела массы m , движущегося со скоростью v → , равна работе, которую сила должна совершить, чтобы разогнать тело до этой скорости.
A = m v 2 2 = E K .
Чтобы остановить тело, нужно совершить работу
A = - m v 2 2 =- E K
Потенциальная энергия
Кинетическая энергия - это энергия движения. Наряду с кинетической энергией есть еще потенциальная энергия, то есть энергия взаимодействия тел, которая зависит от их положения.
Например, тело поднято над поверхностью земли. Чем выше оно поднято, тем больше будет потенциальная энергия. Когда тело падает вниз под действием силы тяжести, эта сила совершает работу. Причем работа силы тяжести определяется только вертикальным перемещением тела и не зависит от траектории.
Вообще о потенциальной энергии можно говорить только в контексте тех сил, работа которых не зависит от формы траектории тела. Такие силы называются консервативными.
Примеры консервативных сил: сила тяжести, сила упругости.
Когда тело движется вертикально вверх, сила тяжести совершает отрицательную работу.
Рассмотрим пример, когда шар переместился из точки с высотой h 1 в точку с высотой h 2 .
При этом сила тяжести совершила работу, равную
A = - m g ( h 2 - h 1 ) = - ( m g h 2 - m g h 1 ) .
Эта работа равна изменению величины m g h , взятому с противоположным знаком.
Величина Е П = m g h - потенциальна энергия в поле силы тяжести. На нулевом уровне (на земле) потенциальная энергия тела равна нулю.
Определение. Потенциальная энергия
Потенциальная энергия - часть полной механической энергии системы, находящейся в поле консервативных сил. Потенциальная энергия зависит от положения точек, составляющих систему.
Можно говорить о потенциальной энергии в поле силы тяжести, потенциальной энергии сжатой пружины и т.д.
Работа силы тяжести равна изменению потенциальной энергии, взятому с противоположным знаком.
A = - ( E П 2 - E П 1 ) .
Ясно, что потенциальная энергия зависит от выбора нулевого уровня (начала координат оси OY). Подчеркнем, что физический смысл имеет изменение потенциальной энергии при перемещении тел друг относительно друга. При любом выборе нулевого уровня изменение потенциальной энергии будет одинаковым.
При расчете движения тел в поле гравитации Земли, но на значительных расстояниях от нее, во внимание нужно принимать закон всемирного тяготения (зависимость силы тяготения от расстояния до цента Земли). Приведем формулу, выражающую зависимость потенциальной энергии тела.
Здесь G - гравитационная постоянная, M - масса Земли.
Потенциальная энергия пружины
Представим, что в первом случае мы взяли пружину и удлинили ее на величину x . Во втором случае мы сначала удлинили пружину на 2 x , а затем уменьшили на x . В обоих случаях пружина оказалась растянута на x , но это было сделано разными способами.
При этом работа силы упругости при изменении длины пружины на x в обоих случаях была одинакова и равна
A у п р = - A = - k x 2 2 .
Величина E у п р = k x 2 2 называется потенциальной энергией сжатой пружины. Она равна работе силы упругости при переходе из данного состояния тела в состояние с нулевой деформацией.

Код ОГЭ 1.17. Кинетическая и потенциальная энергия. Формула для вычисления кинетической энергии. Формула для вычисления потенциальной энергии тела, поднятого над Землей.
Энергия – физическая величина, характеризующая состояние тела или системы тел. Причиной изменения состояния системы тел (изменения энергии) является работа внешних по отношению к рассматриваемой системе сил. В механике энергия тела или системы тел определяется взаимным положением тел (потенциальная энергия) и их скоростями (кинетическая энергия).
Единица измерения энергии в СИ – джоуль.
Кинетическая энергия – часть механической энергии, энергия движущегося тела. Скалярная величина, численно равная половине произведения массы тела на квадрат скорости:
Теорема о кинетической энергии: Работа, совершаемая силой при изменении скорости тела, равна изменению кинетической энергии тела: A = Wk2 – Wk1 = ΔWk.
Причём если А > 0, то Wk увеличивается, и если А
Читайте также: