
Работа асинхронного двигателя под нагрузкой кратко
Обновлено: 30.06.2024
Отличительным признаком асинхронного двигателя является всегда существующая положительная разность, n1 – n2> 0. Ротор никогда не может достигнуть частоты вращения магнитного поля n1, так как при равенстве n1= n2 исчезнут электромагнитные силы, приводящие его в движение.
Разность частот вращения магнитного поля и ротора
называют частотой скольжения. Аналогичная разность скоростей
Называется скоростью скольжения.
Отношение частоты скольжения к частоте вращения поля n1 обозначают sи называют скольжением:
Очевидно, что в первый момент пуска двигателя s = 1. Асинхронные двигатели проектируют так, что на холостом ходу sх = 0,001 ÷ 0,005, а при номинальной нагрузке sном = 0,05.
В установившемся режиме ns, Ωs и s – постоянные. Это означает, что вращающий момент двигателя М уравновешивает противодействующий момент Мпр. Если по каким – либо причинам противодействующий момент увеличится, то ротор начнет тормозиться, т. е. скорость вращения Ω2 будет падать, а скорость его скольжения – увеличиваться. Но последнее вызовет изменение ряда взаимно связанных величин. Увеличатся Э.Д.С. e2и токи I2в проводниках обмотки ротора, электромагнитные силы Fэм2 и вращающий момент М. Когда вращающий момент М станет равным противодействующему Мпр, изменения прекратятся. Двигатель возвратится в установившейся режим. Но скорость вращения ротора Ω2 теперь меньше.
В случае уменьшения противодействующего момента произойдут аналогичные, но противоположно направленные физические процессы. Это означает, что асинхронный двигатель обладает свойством автоматического изменения вращающего момента, т. е. свойством саморегулирования.
Режимы работы асинхронных двигателей
Двигательный режим: При n
Частота вращения ротора не может достигнуть частоты вращения магнитного поля, так как в этом случае угловая скорость вращения магнитного поля относительно обмотки ротора станет равной нулю, магнитное поле перестанет индуцировать в обмотке ротора ЭДС и, в свою очередь, создавать вращающий момент; таким образом, для двигательного режима работы асинхронной машины справедливо неравенство: 0 n1. Асинхронная машина может работать в режиме генератора параллельно с сетью в пределах от n =n1 до n=+∞ т.е. при скольжении от s=0 до s= -∞.
Асинхронный генератор потребляет реактивный ток и требует наличия в сети генераторов реактивной мощности в виде синхронных машин, синхронных компенсаторов, батарей статических конденсаторов (БСК). Из-за этого, несмотря на простоту обслуживания, асинхронный генератор применяют сравнительно редко, в основном в качестве ветрогенераторов малой мощности, вспомогательных источников небольшой мощности и тормозных устройств. Зато генераторный режим асинхронного двигателя используется довольно часто. В таком режиме работают двигатели эскалаторов метро, которые едут вниз. В генераторном режиме работают двигатели лифтов, в зависимости от соотношения веса в кабине и в противовесе.

Режим холостого хода:Режим холостого хода асинхронного двигателя возникает при отсутствии на валу нагрузки в виде редуктора и рабочего органа. Из опыта холостого хода могут быть определены значения намагничивающего тока и мощности потерь в магнитопроводе, в подшипниках, в вентиляторе. В режиме реального холостого хода s=0,01-0,08. В режиме идеального холостого хода n2=n1, следовательно s=0 (на самом деле этот режим недостижим, даже при допущении, что трение в подшипниках не создаёт свой момент нагрузки — сам принцип работы двигателя подразумевает отставание ротора от поля статора для создания поля ротора. При s=0 поле статора не пересекает обмотки ротора и не может индуцировать в нём ток, а значит не создаётся магнитное поле ротора.)
Режим электромагнитного тормоза (противовключение):Если изменить направление вращения ротора или магнитного поля так, чтобы они вращались в противоположных направлениях, то ЭДС и активная составляющая тока в обмотке ротора будут направлены так же, как в двигательном режиме, и машина будет потреблять из сети активную мощность. Однако электромагнитный момент будет направлен встречно моменту нагрузки, являясь тормозящим. Для режима справедливы неравенства: n2 1
Этот режим применяют кратковременно, так как при нём в роторе выделяется много тепла, которое двигатель не способен рассеять, что может вывести его из строя.
Для более мягкого торможения может применяться генераторный режим, но он эффективен только при оборотах, близких к номинальным.
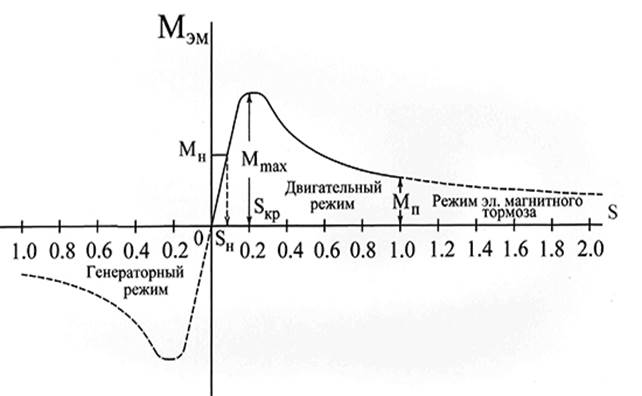
Мн – номинальный момент; Мп – пусковой момент; Мmax – критический момент
Из анализа графика механической характеристики также следует, что устойчивая работа асинхронного двигателя возможна при скольжениях, меньших критического (s
Лекция №19 Скольжение. Пуск асинхронных двигателей
Скольжение
Отличительным признаком асинхронного двигателя является всегда существующая положительная разность, n1 – n2> 0. Ротор никогда не может достигнуть частоты вращения магнитного поля n1, так как при равенстве n1= n2 исчезнут электромагнитные силы, приводящие его в движение.
Разность частот вращения магнитного поля и ротора
называют частотой скольжения. Аналогичная разность скоростей
Называется скоростью скольжения.
Отношение частоты скольжения к частоте вращения поля n1 обозначают sи называют скольжением:
Очевидно, что в первый момент пуска двигателя s = 1. Асинхронные двигатели проектируют так, что на холостом ходу sх = 0,001 ÷ 0,005, а при номинальной нагрузке sном = 0,05.
В установившемся режиме ns, Ωs и s – постоянные. Это означает, что вращающий момент двигателя М уравновешивает противодействующий момент Мпр. Если по каким – либо причинам противодействующий момент увеличится, то ротор начнет тормозиться, т. е. скорость вращения Ω2 будет падать, а скорость его скольжения – увеличиваться. Но последнее вызовет изменение ряда взаимно связанных величин. Увеличатся Э.Д.С. e2и токи I2в проводниках обмотки ротора, электромагнитные силы Fэм2 и вращающий момент М. Когда вращающий момент М станет равным противодействующему Мпр, изменения прекратятся. Двигатель возвратится в установившейся режим. Но скорость вращения ротора Ω2 теперь меньше.
В случае уменьшения противодействующего момента произойдут аналогичные, но противоположно направленные физические процессы. Это означает, что асинхронный двигатель обладает свойством автоматического изменения вращающего момента, т. е. свойством саморегулирования.
Режимы работы асинхронных двигателей
Двигательный режим: При n n1. Асинхронная машина может работать в режиме генератора параллельно с сетью в пределах от n =n1 до n=+∞ т.е. при скольжении от s=0 до s= -∞.
Асинхронный генератор потребляет реактивный ток и требует наличия в сети генераторов реактивной мощности в виде синхронных машин, синхронных компенсаторов, батарей статических конденсаторов (БСК). Из-за этого, несмотря на простоту обслуживания, асинхронный генератор применяют сравнительно редко, в основном в качестве ветрогенераторов малой мощности, вспомогательных источников небольшой мощности и тормозных устройств. Зато генераторный режим асинхронного двигателя используется довольно часто. В таком режиме работают двигатели эскалаторов метро, которые едут вниз. В генераторном режиме работают двигатели лифтов, в зависимости от соотношения веса в кабине и в противовесе.
Режим холостого хода:Режим холостого хода асинхронного двигателя возникает при отсутствии на валу нагрузки в виде редуктора и рабочего органа. Из опыта холостого хода могут быть определены значения намагничивающего тока и мощности потерь в магнитопроводе, в подшипниках, в вентиляторе. В режиме реального холостого хода s=0,01-0,08. В режиме идеального холостого хода n2=n1, следовательно s=0 (на самом деле этот режим недостижим, даже при допущении, что трение в подшипниках не создаёт свой момент нагрузки — сам принцип работы двигателя подразумевает отставание ротора от поля статора для создания поля ротора. При s=0 поле статора не пересекает обмотки ротора и не может индуцировать в нём ток, а значит не создаётся магнитное поле ротора.)
Режим электромагнитного тормоза (противовключение):Если изменить направление вращения ротора или магнитного поля так, чтобы они вращались в противоположных направлениях, то ЭДС и активная составляющая тока в обмотке ротора будут направлены так же, как в двигательном режиме, и машина будет потреблять из сети активную мощность. Однако электромагнитный момент будет направлен встречно моменту нагрузки, являясь тормозящим. Для режима справедливы неравенства: n2 1
Этот режим применяют кратковременно, так как при нём в роторе выделяется много тепла, которое двигатель не способен рассеять, что может вывести его из строя.
Для более мягкого торможения может применяться генераторный режим, но он эффективен только при оборотах, близких к номинальным.
Мн – номинальный момент; Мп – пусковой момент; Мmax – критический момент
Из анализа графика механической характеристики также следует, что устойчивая работа асинхронного двигателя возможна при скольжениях, меньших критического (s
n1 – частота вращения магнитного поля статора. n2 – частота вращения ротора.
Магнитное поле статора вращается в том же направлении, что и ротор и скользит относительно ротора с частотой ns= n1 – n2
Отставание ротора от вращающегося магнитного поля статора характеризуется скольжением S= ns / n1, => S =(n1 – n2) / n1
Если ротор неподвижен, то n2=0, S=(n1 – n2) / n1, => S = n1 / n1=1
Если ротор вращается синхронно с магнитным полем, то скольжение S= 0.
При холостом ходе, то есть при отсутствии нагрузки на валу двигателя скольжение ничтожно мало и его можно принять равным 0. Нагрузкой на валу ротора может служить, например резец токарного станка. Он создаёт тормозной момент. При равенстве вращающего и тормозного момента двигатель будет работать устойчиво. Если нагрузка на валу увеличилась, то тормозной момент станет больше вращающего и частота вращения ротора n2 уменьшится. Согласно формуле S =(n1 – n2) / n1 скольжение увеличится. Так как магнитное поле статора скользит относительно ротора с частотой ns= n1 – n2, то оно будет пересекать проводники ротора чаще, в них увеличится ток и двигательный вращающий момент, который вскоре станет равным тормозному. При уменьшении нагрузки, тормозной момент становится меньше вращающего, увеличивается n2 и уменьшается S. Уменьшается Э.Д.С и ток ротора и вращающий момент вновь равен тормозному. Магнитный поток в воздушном зазоре машины при любом изменении нагрузки остаётся примерно постоянным.
2. Рабочие характеристики асинхронного двигателя
Рабочие характеристики асинхронного двигателя есть зависимость
n2 – частоты вращения ротора
М – развиваемого момента
От полезной мощности Р2 на валу машины.
Эти характеристики снимаются при естественных условиях. Частота тока f1 и напряжение U1 остаются постоянными. Изменяется только нагрузка на валу двигателя.
При увеличении нагрузки на валу двигателя S увеличивается. При холостом ходе двигателя n2≈n1, и S≈0. При номинальной нагрузке скольжение обычно составляет от 3 до 5%.
При увеличении нагрузки на валу двигателя частота вращения n2 уменьшается. Однако, изменение частоты вращения при увеличении нагрузки от 0 до номинальной очень незначительны и не превышают 5%. Поэтому, скоростная характеристика асинхронного двигателя является жёсткой. Кривая имеет очень малый наклон к горизонтальной оси.
Вращающий момент М, развиваемый двигателем, уравновешен тормозным моментом на валу Мт и моментом М0, идущим на преодоление механических потерь, то есть М= Мт + М0 =Р2/Ω2+ М0, где Р2 – полезная мощность двигателя, Ω2-угловая скорость ротора. При холостом ходе М= М0. С увеличением нагрузки вращающий момент также увеличивается, причём за счёт некоторого уменьшения частоты вращения ротора увеличение вращающего момента происходит быстрее, чем полезной мощности на валу.
Ток I1, потребляемый двигателем из сети неравномерно изменяется с увеличением нагрузки на валу двигателя. При холостом ходе СОSφ-коэффициента мощности – мал. И ток имеет большую реактивную составляющую. При малых нагрузках на валу двигателя активная составляющая тока статора меньше реактивной составляющей, поэтому активная составляющая тока незначительно влияет на ток I1. При больших нагрузках активная составляющая тока статора становится больше реактивной и изменение нагрузки вызывает значительное изменение тока I1.
Графическая зависимость потребляемой двигателем мощности Р1 изображается почти прямой линией, незначительно отклоняющейся вверх при больших нагрузках, что объясняется увеличением потерь в обмотках статора и ротора с возрастанием нагрузки.
Зависимость СОSφ-коэффициента мощности – от нагрузки на валу двигателя следующая. При холостом ходе СОSφ мал, порядка 0,2. Так как активная составляющая тока статора, обусловленная потерями мощности в машине, мала по сравнению с реактивной составляющей этого тока, создающей магнитный поток. При увеличении нагрузки на валу СОSφ возрастает, достигая наибольшего значения 0,8–0,9, в результате увеличения активной составляющей тока статора. При очень больших нагрузках происходит некоторое уменьшение СОSφ, так как в следствие значительного увеличения скольжения и частоты тока в роторе возрастает реактивное сопротивление обмотки ротора.
Кривая КПДη имеет такой же вид как в любой машине или трансформаторе. При холостом ходе КПД=0. С увеличением нагрузки на валу двигателя КПД резко увеличивается, а затем уменьшается. Наибольшего значения КПД достигает при такой нагрузке, когда потери мощности в стали и механические потери, не зависящие от нагрузки, равны потери мощности в обмотках статора и ротора, зависящим от нагрузки.
Раздел: Промышленность, производство
Количество знаков с пробелами: 9605
Количество таблиц: 0
Количество изображений: 0
Если пренебречь трением и магнитными потерями в стали (идеализированная машина), то ротор асинхронного двигателя при холостом ходе вращался бы с синхронной частотой n=n1 в ту же сторону, что и поле статора; следовательно, скольжение было бы равно нулю. Однако в реальной машине частота вращения ротора n при холостом ходе никогда не может стать равной частоте вращения n1, так как в этом случае магнитное поле перестанет пересекать проводники обмотки ротора и в них не возникнет электрический ток.
Поэтому двигатель в этом режиме не может развить вращающего момента и ротор его под влиянием противодействующего момента сил трения начнет замедляться. Замедление ротора будет происходить до тех пор, пока вращающий момент, возникший при уменьшенной частоте вращения, не станет равным моменту, создаваемому силами трения. Обычно при холостом ходе двигатель работает со скольжением s = 0,2-0,5 %.
При холостом ходе в асинхронном двигателе имеют место те же электромагнитные процессы, что и в трансформаторе (обмотка статора аналогична первичной обмотке трансформатора, а обмотка ротора—вторичной обмотке). По обмотке статора проходит ток холостого хода I0, однако его значение в асинхронном двигателе из-за наличия воздушного зазора между ротором и статором значительно больше, чем в трансформаторе (20—40 % номинального тока по сравнению с 3—10 % у трансформатора). Для уменьшения тока I0 в асинхронных двигателях стремятся выполнить минимально возможные по соображениям конструкции и технологии зазоры.
Например, у двигателя мощностью 5 кВт зазор между статором и ротором обычно равен 0,2—0,3 мм. Ток холостого хода, так же как и в трансформаторе, имеет реактивную и активную составляющие. Реактивная составляющая тока холостого хода (намагничивающий ток) обеспечивает создание в двигателе требуемого магнитного потока, а активная составляющая — передачу в обмотку статора из сети энергии, необходимой для компенсации потерь мощности в машине в этом режиме.
Нагрузочный режим.
Чем больше нагрузочный момент на валу, тем больше скольжение и тем меньше частота вращения ротора. Увеличение скольжения при возрастании момента объясняется следующим образом. При увеличении нагрузки на валу ротора он начинает тормозиться и частота его вращения т уменьшается.
Но одновременно увеличивается частота n1— n персечения вращающимся полем проводников обмотки ротора, а следовательно, э. д. с. Е2, индуцированная в этой обмотке, ток в роторе I2 и образованный им электромагнитный вращающий момент М. Этот процесс будет продолжаться до тех пор, пока электромагнитный момент двигателя M не сравняется с нагрузочным моментом Мвн.
При достижении равенства моментов М = Мвн торможение прекратится и двигатель будет снова вращаться с постоянной частотой вращения, но меньшей, чем до увеличения нагрузки. При уменьшении нагрузочного момента Мвн частота вращения ротора по той же причине будет увеличиваться. Обычно при номинальной нагрузке скольжение для двигателей средней и большой мощности составляет 2—4 %, а для двигателей малой мощности от 5 до 7,5 %.
При работе двигателя под нагрузкой по обмоткам его статора и ротора проходят токи i1 и i2. Частота тока в обмотках статора f1 и ротора f2 определяется частотой пересечения вращающимся магнитным полем проводников соответствующей обмотки. Обмотка статора пересекается магнитным полем с частотой n1, а обмотка вращающегося ротора — с частотой n1 — n. Следовательно,
Передача электрической энергии из статора в ротор происходит так же, как и в трансформаторе. Двигатель потребляет из сети электрическую мощность Pэл = 3U1I1cosφ1 и отдает приводимому им во вращение механизму механическую мощность Рмх (рис. 260).

Рис. 260. Энергетическая диаграмма асинхронного двигателя
В процессе преобразования энергии в машине имеют место потери мощности: электрические в обмотках статора ΔРэл1 и ротора ΔРэл2, магнитные ΔРм от гистерезиса и вихревых токов в ферромагнитных частях машины и механические ΔРмх от трения в подшипниках и вращающихся частей о воздух.
Из статора в ротор вращающимся электромагнитным полем передается электромагнитная мощность Pэм роторе она превращается в механическую мощность ротора Р’мх. Полезная механическая мощность на валу двигателя Pмх меньше мощности Р’мх на значение потерь мощности на трение ?Рмх.
При возрастании механической нагрузки на валу двигателя увеличивается ток I2. В соответствии с этим возрастает и ток I1 в обмотке статора.
Электромагнитный момент М создается в асинхронном двигателе в результате взаимодействия вращающегося магнитного поля с током I2, индуцируемым им в проводниках обмотки статора. Однако в создании его участвует не весь ток I2, а только его активная составляющая I2cosφ2 (здесь φ2 — угол сдвига фаз между током I2 и э. д. с. Е2 в обмотке ротора).
Фт — амплитуда магнитного потока, созданного обмоткой статора;
cм — постоянная, определяемая конструктивными параметрами данной машины и не зависящая от режима ее работы.
Поясним физический смысл формулы (84). На рис. 261 изображен ротор двухполюсного асинхронного двигателя в развернутом виде, на котором кружками показаны поперечные сечения проводников.
Крестики и точки внутри проводников обозначают направление в них тока i2, а под проводниками — направление индуцированных э. д. с. e2, которые пропорциональны индукции В в данной точке воздушного зазора между статором и ротором. Кривая В показывает распределение вдоль окружности ротора индукции, создаваемой вращающимся магнитным полем, кривая i2 — распределение тока в проводниках, а кривая f — распределение электромагнитных сил, возникающих в результате взаимодействия тока (а с вращающимся магнитным полем.
Электромагнитный вращающий момент М, создаваемый в результате совместного действия всех сил f, будет пропорционален среднему значению электромагнитной силы fср. Легко заметить, что к проводникам, лежащим на дуге, равной 180° — φ2, приложены силы f, увлекающие ротор за вращающимся магнитным полем, а на дуге φ2 — тормозящие силы. Поэтому при неизменном токе I2 среднее значение электромагнитной силы fср, а следовательно, и электромагнитный момент М будут тем больше, чем меньше угол φ2. Электромагнитный момент М зависит от скольжения s.

Рис. 261. Распределение индукции В, тока i2 и электромагнитных сил f, действующих на проводники асинхронного двигателя
Так, при увеличении скольжения возрастает э. д. с. Е2 в обмотке ротора и ток I2. Однако одновременно уменьшается cosφ2, так как активное сопротивление обмотки ротора R2 остается неизменным, а реактивное Х2 увеличивается (возрастает частота тока f2 в обмотке ротора).
1 комментарий
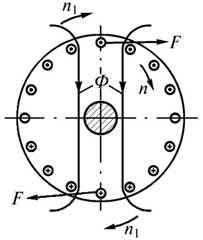
Под влиянием подведенного к статору напряжения сети U1 (рис. 10-19) в его обмотке протекает ток I1, мгновенное направление которого показано соответственно моменту а (рис. 10-2). Этот ток создает вращающийся магнитный поток Ф, замыкающийся через статор и ротор. Поток создает в обеих обмотках э. д. с. Е1 и Е 2, как в первичной и вторичной обмотках трансформатора. Таким образом, асинхронный двигатель подобен трехфазному трансформатору, в котором э. д. с. создаются вращающимся магнитным потоком. Пусть поток вращается в направлении движения стрелки часов. Под влиянием э. д. с. Е2 в обмотке направление которого показано на ротора пойдет ток I2, рис. 10-19 в предположении, что он совпадает по фазе с Е2.
Рис. 10-19. Работа асинхронного двигателя при cos Ψ2 = 1.
Взаимодействие тока I2 и потока Ф создает электромагнитные силы F, приводящие ротор во вращение, вслед за вращающимся потоком. Таким образом, асинхронный двигатель представляет собой трансформатор с вращающейся, вторичной обмоткой и способный поэтому превращать электрическую мощность Е2I2 cos Ψ2 в механическую.
Ротор всегда отстает от вращающегося магнитного потока, так как только в этом случае может возникать э, д. с. E2, а следовательно, ток I2 и силы F. Чтобы изменить направление вращения ротора, следует изменить направление вращения потока. Для этого меняют местами два любых провода, подводящих ток от сети к статору. В этом случае меняется порядок следования фаз ABC на АСВ или ВАС и поток вращается в обратную сторону.
СКОЛЬЖЕНИЕ РОТОРА
Ротор асинхронного двигателя всегда должен отставать от вращающегося магнитного потока. Скорость вращения потока принято означать п1, она постоянна, так как р = const и f1 = const. Скорость вращения ротора можно обозначить п2. Величина называется скольжение м.
Теоретически скольжение меняется от 1 до 0 или от 100% до 0, так как при неподвижном роторе в первый момент пуска п2 = 0, а если вообразить, что ротор вращается синхронно с потоком, п2 = п1. Чем больше нагрузка на валу, тем больший тормозной момент должен уравновеситься большим вращающим моментом. Последнее возможно только при увеличении I2, а значит, и Е2. Как будет показано ниже, Е2увеличивается при уменьшении n2, т. е. при увеличении s. Таким образом, при увеличении нагрузки на валу скорость ротора п2 уменьшается. Скольжение при номинальной нагрузке Sн у асинхронных двигателей равно от 1 до 6%; меньшая цифра относится к мощным двигателями
ЧАСТОТА Э. Д. С. И ТОКА В ОБМОТКЕ РОТОРА
Магнитный поток вращается со скоростью п1, ротор — со скоростью п2. Частота э. д. с. и тока в роторе, очевидно, пропорциональна скорости вращения потока относительно ротора, т. е. величине п1 — п2 . Тогда
f2 = (p( п1 ))/60 = pn1s/60 = f1s
Читайте также:
- Основной юридический документ учета научного описания и охраны фондов школьного музея это
- Психологические особенности студенческого возраста и проблема воспитания в высшей школе
- Гигиеническое воспитание и обучение населения кратко
- Приказ об ответственном за ведение табеля учета рабочего времени в доу
- Закон доступная среда в школе