
План урока по спецтехнологии электромонтер схема динамического торможения
Обновлено: 02.07.2024

Дата/ _11.12.2019 г.__
Группа :Тэ-2
Время выделенное на урок: 90 минут
Цели урока: а) обучающие: Изучить устройство и общий принцип работы электрических машин и соединение двигателя через кнопочный пост.
б) развивающие: Создать условия для саморазвития личности
в) воспитательная: Стимулировать познавательную активность, самопознание;
- воспитывать потребность у студентов применять знания, полученные на уроках в своей будущей специальности;
- способствовать профессиональной ориентации
Языковой цель:Ознакомление терминами электромеханических машин.
Методы урока: словесный, наглядно-демонстрационный, практические (исследовательский, проблемно-поисковый), методы активного обучения, методика CLIL, вопросы-ответы, самостоятельная работа обучающихся.
Оборудование, наглядные пособия: Рабочая тетрадь, двигатели и генераторы, инструменты, схема, доска.
Межпредметные связи :“Теоретическая основа электротехники”, “Электротехнические материалы и измерения”
Ожидаемый результат:
В течении урока у обучающихся формируются следующие компетенции:
- получая полную информации оэлектрических машинах и уметь соединять;
- осуществлять поиск, анализ и оценку информации, необходимой для постановки и решения профессиональных задач, профессионального и личностного развития; работать в коллективе и команде.
Работы учащихся
Учащиеся разделяются в две подгруппы.
Проверка учащихся к готовности уроку.
2.Повторение пройденного материала
Разделяю группу на две подгруппы.
Раздаю материалы по пройденной теме:
Раздаю по 2 измерительных прибора на подгруппы, и один студент из подгруппы должен выйти и рассказать про устроиство и ее применение и его соединение.
3.Обьяснение новой темы
4.Закрепление новой темы:
Показываю наглядное соединение новой темы.
5. Выдача задания
Раздаю техническую карту соединения электрических машин
6. Текущии инструктаж
Работа на территории предприятия. Выполнение соединения электродвигателя через магнитный пускатель и кнопкой управления
7. Проверочная работа
Проверка правильности соединения электродвигателя
Студенты на плакате отвечают на вопросы по новой теме в виде кроссворда.
Оценивание студентов по выполненным работам.
10.Выдача домашнего задания
Выдача домашнего задания студентам
11.Уборка рабочего места
Уборка рабочего места
Ход занятия
Группа разделяется на две подгруппы.
І. Организационный этап:
Приветсвие со студентами и проверка отсутствующих на занятии по журналу.
ІІ. Повторение проиденного материала:
Группа разделяется на две подгруппы. Раздаются материалы по проиденной теме на каждую подруппу. Выдается по два измерительных прибора. На плакатах каждая подгруппа написав должна дать характеристику на те материалы которые лежат перед ними.
ΙІІ. Обьяснение новой темы:
Техника безопасности при эксплуатации электрических машин
К эксплуатации и ремонту электрических машин допускаются электромонтер, имеющие квалификационную группу не ниже III и прошедшие инструктаж на рабочем месте. Ответственность за безопасность при обслуживании и ремонте несет руководитель электротехнической службы хозяйства.
Электромонтеры должны иметь основные защитные средства для установок напряжением до 1000 В: диэлектрические перчатки, инструмент с изолированными рукоятками, закоротки (или переносное заземление) и указатели напряжения. Дополнительные средства: диэлектрические галоши, резиновые коврики, изолирующие подставки и плакаты.
Перед применением защитных средств следует внешним осмотром убедиться в их исправности, обращая внимание на дату их проверки.
При проведении работ по техническому обслуживанию и ремонту необходимо строго соблюдать правила тех безопасности при эксплуатации электрических машин
Распоряжение на проведение работ (устное или оформленное нарядом) дает руководитель электротехнической службы хозяйства или лицо, его заменяющее, с квалификацией не ниже 4 группы.
Рабочие электрифицированных механизмов должны быть проинструктированы по правилам эксплуатациии техники безопасности при работе на установках.
Общие сведения об электрических машинах
Электрическая машина- это устройство, предназначенное для взаимного преобразования механической и электрической энергий.
Электрические машины широко применяют на электрических станциях, в промышленности, на транспорте, в авиации, в системах автоматического регулирования и управления, в быту. Наиболее широкое применение нашли трехфазные синхронные и асинхронные машины, а также коллекторные машины переменного тока, которые допускают экономичное регулирование частоты вращения в широких пределах.
Электрические машины преобразуют механическую энергию в электрическую и наоборот.
Электрическая машина, преобразующая механическую энергию в электрическую энергию, называется электрическим генератором.
Электрическая машина, преобразующая электрическую энергию в механическую энергию, называется электрическим двигателем.
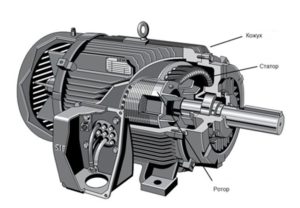
Электрическая машина имеет две основные части — вращающуюся, называемую ротором, и неподвижную, называемую статором (рис. 1).

Р ис. 1. Обычная конструктивная схема электрической машины,
1 — статор; 2 — ротор; 3 — подшипники.
Принцип действия электрической машины.

Принцип действия электрической машины основан на физических законах электромагнитной индукции и электромагнитных сил. Есть два полюса электромагнита, создающего магнитное поле. В магнитном поле между полюсами помещен проводник. Если этот проводник передвигать с силой F1, то в нем согласно закону электромагнитной индукции возникнет э.д.сE.
Если концы проводника замкнуты на внешнее сопротивление, то по нему пойдет ток.
В результате взаимодействия тока i в проводнике и поля возникнет электромагнитная сила Fэ. Получается, что дан. ЭМ будет являться генератором.
Та же элементарная машина может работать двигателем, т. е. преобразовывать электрическую энергию в механическую. Подведем к проводнику напряжение u , чтобы появился ток i в проводнике. При этом возникнет электромагнитная сила, которая заставит проводник передвигаться.
Если вращать вал электрической машины, то на зажимах ее электрической обмотки создается разность электрических потенциалов, а при подключенном электроприемнике возникает электрический ток. Таким образом эта машина преобразует механическую энергию в электрическую, т.е. является генератором электроэнергии. С другой стороны, если электрическую обмотку этой машины подключить к источнику электроэнергии, то в результате происходящих в ней процессов создается электромагнитный вращающий момент, под действием которого вал машины вращается и вращает приводной механизм.
Основные принципы ЭМ:
1. Электрическая машина обратима, т. е. может работать и генератором и двигателем.
2. Наличие магнитного поля и проводников, по которым проходит ток, является необходимым условием для работы любой электрической машины. Для усиления магнитного поля применяются ферромагнитные материалы в виде сталей.
Строение трехфазного асинхронного двигателя
Асинхронный электродвигатель – это электрическая машина, которая преобразовывает электрическую энергию в механическую. То есть потребляет электрический ток, а взамен дают крутящий момент, с помощью которого можно вращать многие агрегаты
Двигатель состоит из таких частей:
1. Статор с обмотками. Или станина внутри которой находится статор с обмотками.
2. Ротор. Это если короткозамкнутый. А если фазный, то можно сказать, что это якорь или даже коллектор. Я думаю, ошибки не будет.
3. Подшипниковые щиты. На мощных двигателях ещё спереди стоят подшипниковые крышки с уплотнителями.
4. Подшипники. Могут стоять скольжения или качения, в зависимости от исполнения.
5. Вентилятор охлаждения. Изготавливается из пластмассы или металла.
6. Кожух вентилятора. Имеет прорези для подачи воздуха.
7. Борно или клеммная коробка. Для подключения кабелей.
Это все его основные детали, но в зависимости от вида, типа и исполнения может немного изменяться.


Асинхронные электродвигателя в основном выпускают двух видов: трёхфазные и однофазные. В свою очередь трёхфазные ещё подразделяются на подвиды: с короткозамкнутым ротором или фазным ротором.
Самые распространённые – это трёхфазные с короткозамкнутым ротор.
Статор имеет круглую форму и набирается с листов специальной стали, которые изолированы между собой, и эта собранная конструкция образует сердечник с пазами. В пазы сердечника укладываются обмотки, со специального обмоточного, изолированного лаком провода. Провод это отливают в основном из меди, но также есть и с алюминия. Если двигатель очень мощный, то обмотки делаю шиной. Обмотки укладывают так, чтобы они были сдвинуты относительно друг друга на 120 градусов. Соединяются обмотки статора в звезду или в треугольник.
Ротор, как выше я уже писал выше, бывает короткозамкнутый или фазный.

Фазный ротор представляет собой вал с сердечником и тремя обмотками. Одни концы, которых обычно соединяют в звезду, а вторые три конца присоединяют к токосъемным кольцам. А на эти кольца, с помощью щёток подают электрический ток.
Если в цепь фазных обмоток добавить нагрузочный реостат, и при пуске двигателя увеличивать активное сопротивление, то таким способ можно уменьшить большие пусковые токи.
Когда на обмотки статора подаются электрический ток, то в этих обмотках возникает электрический поток. Как вы помните, из выше написанных слов, фазы у нас смещены относительно друг друга на 120 градусов. И вот этот поток в обмотках начинает вращаться.
И при вращении магнитного потока статора, в обмотках ротора появляется электрический ток, и своё магнитное поле. Два этих магнитных поля начинают взаимодействовать и заставляют вращаться ротор электродвигателя. Это если ротор короткозамкнутый.
Ну а с фазным ротором, по сути, принцип тот же. Напряжение подаётся на статор и на ротор. Появляются два магнитных поля, которые начинают взаимодействовать и вращать ротор.
Основные достоинства асинхронного электродвигателя с короткозамкнутым ротором:
1. Очень простое устройство, что позволяет сократить затраты на его изготовление.
2. Цена намного меньше по сравнению с другими двигателями.
3. Очень простая схема запуска.
4. Скорость вращения вала практически не меняется с увеличением нагрузки.
5. Хорошо переносит кратковременные перегрузы.
6. Возможность подключения трёхфазных двигателей в однофазную сеть.
7. Надёжность и возможность эксплуатировать практически в любых условиях.
8. Имеет очень высокий показатель КПД и cos φ.
1. Не возможности контролировать частоту вращения ротора без потери мощности.
2. Если увеличить нагрузку, то уменьшается момент.
3. Пусковой момент очень мал по сравнению с другими машинами.
4. При недогрузе увеличивается показатель cos φ
5. Высокие показатели пусковых токов.
Достоинства двигателей с фазным ротором:
1. По сравнению с короткозамкнутыми двигателями, имеет достаточно большой вращающий момент. Что позволяет его запускать под нагрузкой.
2. Может работать с небольшим перегрузом, и при этом частота вращения вала практически не меняется.
3. Небольшой пусковой ток.
4. Можно применять автоматические пусковые устройства.
1. Большие габариты.
2. Показатели КПД и cos φ меньше, чем у двигателей с короткозамкнутым ротором. И при недогрузе эти показатели имеют минимальное значение
3. Нужно обслуживать щёточный механизм.
Соединение асинхронного двигателя
Фазные обмотки статора электродвигателя соединяются в звезду или треугольник (в зависимости от напряжения сети). Если в паспорте электродвигателя указано, что обмотки выполнены на напряжение 220/380 В, то при включении его в сеть с линейным напряжением 220 В обмотки соединяют в треугольник, а при включении в сеть 380 В - в звезду.


Магнитный пускатель (далее — пускатель) — коммутационный аппарат предназначенный для пуска и остановки двигателя.

Кнопки для управления электродвигателем входят в состав кнопочных постов, кнопочные посты могут быть однокнопочные, двухкнопочные, трехкнопочные и т.д

Данная схема является самой простой схемой подключения электродвигателя, в ней отсутствует цепь управления, а включение и отключение электродвигателя осуществляется автоматическим выключателем.
Главными достоинствами данной схемы является дешевизна и простота сборки, к недостаткам же данной схемы можно отнести то, что автоматические выключатели не предназначены для частого коммутирования цепей это, в сочетании с пусковыми токами, приводит к значительному сокращению срока службы автомата, кроме того в данной схеме отсутствует возможность устройства дополнительной защиты электродвигателя.
IV. Наглядный показ соединения асинхронного двигателя
V.Выдача задания.:Студентам дается схема подключения асинхронного двигателя

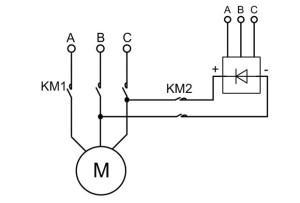
Динамическое торможение асинхронного двигателя выполняется отключением двигателя от трехфазной сети и подачи постоянного напряжения на любые две обмотки статора (AB, BC или AC). Магнитный поток в обмотках статора, взаимодействует с током ротора, создавая тормозной момент, что приводит к полному останову двигателя.
Пуск асинхронного двигателя с кз ротором
Подача напряжения на управляющую и силовую цепь осуществляется автоматическим выключателем QF. Нажатием кнопкой SB1 “Пуск” запитывается магнитный пускатель КМ1, который срабатывает и замыкает свои контакты:
- КМ1.1 в цепи статора — двигатель запускается
- КМ1.2 — шунтирует кнопку “Пуск”
- КМ1.3 -подает напряжения на реле времени КТ
и размыкает нормально замкнутый контакт КМ1.4 который не даст сработать магнитному пускателю КМ2, после срабатывания реле времени КТ.

Рисунок.1. Схема управления асинхронным двигателем с короткозамкнутым ротором с динамическим торможением в функции времени
Осатнов асинхронного двигателя с кз ротором
При нажатии кнопки SB2 “Стоп” катушка пускателя КМ1 обесточивается и пускатель одновременно возвращает свои контакты в исходное положение:
- Размыкает КМ1.1 (прекращает подачу электрического тока на обмотку статора) – асинхронный двигатель обесточен.
- Размыкает КМ1.2 — разблокирует кнопку пуска
- Размыкает КМ1.3 — обесточивает реле времени КТ
- Замыкает нормально замкнутый контакт КМ1.4, что приводит подачи напряжения на контактор КМ2, так как контакты реле времени КТ размыкаются не сразу, а через заданный временной интервал. При срабатывании КМ2 на статор асинхронного двигателя подаётся постоянное напряжение, двигатель переходит в режим динамического торможения.
В схеме применено реле времени с выдержкой времени при размыкании. Длительность подачи постоянного напряжения на статор будет равна выдержки реле КТ. После истечении выдержки скорость вала двигателя близка к нулю, контакты КТ размыкаются и обесточивают КМ2 и двигатель отключается от сети.
Для регулировки интенсивности торможения в цепь статора включен регулировочный резистор R. В схеме применена блокировка с помощью размыкающих контактов КМ1.4 и КМ2 для невозможности включения статора двигателя одновременно в сеть постоянного и трехфазного тока.
Электропривод является основой практического большинства современных механизмов. Одной из форм его работы является динамическое торможение асинхронного двигателя. Почему этот режим имеет такое значение и как он организовывается, попытаемся разобраться в этой статье.
Асинхронный двигатель и его работа
Очевидно, что режимы функционирования электродвигателей асинхронного типа напрямую зависят от их конструкции и общих принципов работы. Этот силовой агрегат совмещает в себе два ключевых компонента:
- Неподвижный статор. Пластинчатый цилиндр, в продольные пазы на внутренней поверхности которого укладывается проволочная обмотка,
- Вращающийся ротор. Совмещенный с валом сердечник (магнитопровод), который содержит прутковую обмотку на внешней стороне.
За счет различных частот вращения статора и ротора между ними возникает ЭДС, которая приводит вал в движение. Стандартное значение этого параметра может достигать 3000 об/мин, что требует определенного усилия для ее остановки. Из логических соображений можно заключить, что раз стартует двигатель за счет ЭДС, то и останавливать его тоже нужно электродинамическим путем.
Что такое динамическое торможение?
На этом месте может возникнуть закономерный вопрос: зачем что-то придумывать, если можно отключить двигатель от электросети, и он сам остановится? Это бесспорно так, но учитывая высокую частоту вращения и массо-центровочные характеристики, пройдет некоторое время до того момента, когда ротор полностью остановится. Этот период называется свободным выбегом и каждый в детстве его наблюдал, запуская простую юлу. Тем не менее, если работа оборудования предполагает частое использование пускателей, то такой режим приводит к очевидной потере времени.
Для быстрой остановки используются режимы торможения, которые предполагают трансформацию механической (в данном случае – кинетической) энергии искусственным путем. Все выделяют два основных вида торможения, которые подразделяются затем на подвиды:
- Механическое. Вал двигателя сообщается физически с тормозными колодками, вследствие чего возникает трение, быстрая остановка и выделение теплоты,
- Электрическое. Асинхронный двигатель останавливается за счет преобразования цепи подключения, вследствие чего механическая энергия трансформируется сперва в электрическую. Далее возможны два варианта ее израсходования, зависящие от схемы: либо избыток электричества выбрасывается в резервную цепь сети, либо трансформируется в тепло, за счет нагрева обмоток и сопротивления.
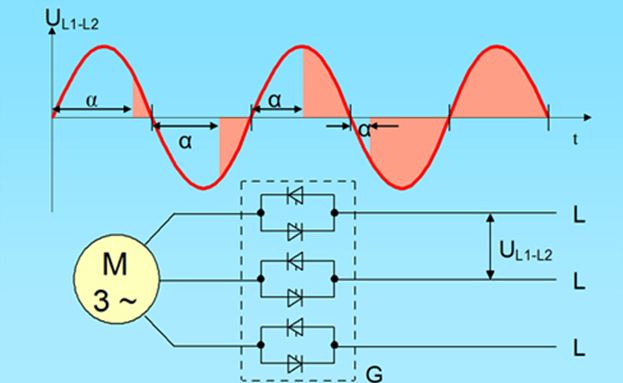
Динамическое торможение асинхронного двигателя относится к электрическому типу, так как в процессе обмотка статора отключается от сети с переменным током (две из трех фаз) и переводится в замкнутую цепь постоянного тока. При этом магнитное поле в статоре преобразуется из вращающегося в неподвижное. В роторе по-прежнему будет наводиться ЭДС, но момент будет направлен в обратную сторону, что приводит к торможению.
Классическая схема, как можно видеть на иллюстрации, предусматривает отключение от сети одной фазы контактором КМ1. При этом две другие фазы за счет контактора КМ2 переключаются в цепь с постоянным током через диодный мост.
Главным преимуществом такого способа торможения является возможность плавно контролировать тормозящий момент (за счет изменения напряжения или сопротивления) и осуществлять точную остановку.
Основные виды динамического торможения
Организация принудительной остановки асинхронного двигателя по электрическому принципу может быть осуществлена несколькими способами:
- Электродинамическим. Это классический вариант, при котором две фазы нужно закоротить и перевести на питания от цепи постоянного тока,
- Рекуперативным (генераторным). Характеризуется возвратом лишней электроэнергии в сеть,
- Противовключением. Этот вариант реализуется по схеме реверса, то есть с подключением фаз через пару магнитных пускателей,
- Самовозбуждением. Подключением к обмоткам статора батареи конденсаторов.
Виды динамического торможения
Классическое динамическое торможение
Эффективность такого режима работы зависит от расчета и значения следующих параметров:
- Величина тока, который подается через параллельную цепь на обмотки статора. Чем выше этот показатель, тем больше момент торможения,
- Величина сопротивления, которое вводится в цепь ротора. Чем выше по расчету сопротивление, тем быстрее тормозится двигатель,
- Величина магнитной движущей силы (МДС). Иногда ее называют ампер витками, поскольку расчет ведется по формуле F = I×W, где I – величина тока, а W – количество витков.
Обмотка статора при этом может подключаться как минимум пятью разными способами:
- Треугольником,
- Треугольником с закороченными фазами,
- Звездой,
- Звездой с закороченным нулем,
- Звездой с закороченными двумя фазами.
В каждом случае на основании векторной диаграммы ведется расчет МДС, тормозного сопротивления и напряжения цепи.
Рекуперативное торможение
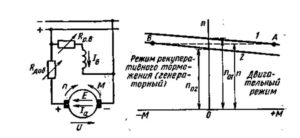
Режим рекуперативного торможения
Поскольку избыток электроэнергии, который высвобождается в процессе торможения, направляется обратно в сеть через мост/батарею конденсаторов, то этот режим работы считается наиболее экономичным. Наиболее часто этот способ применяется в подъемно-транспортной технике и оборудовании, которое работает на перемещение грузов или собственного веса под уклон. Классический пример – лифт, где рекуперативное торможение приводного двигателя используется для начального подтормаживания. Также подобная схема широко используется в электрифицированном транспорте, например, в трамваях, троллейбусах, электричках. Применяют ее и в специальной технике, например, экскаваторах, широко используемых на строительстве мостов, дорог, зданий и т. п.
Принцип расчета и организации генераторного режима заключается в превышении частотой вращения ротора ее синхронного значения. В таком случае электромагнитный момент меняет направление, что приводит к торможению.
Торможение противовключением
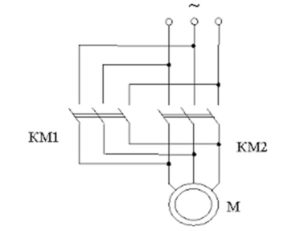
Схема торможения противовключением
На практике режим противовключения может быть организован несколькими разными способами. Классическим является использование пары магнитных пускателей, подключенных по реверсной схеме. В этом случае, быстрая остановка агрегата осуществляется за счет изменения положения фаз (противовключение).
Основной пускатель КМ2 производит отключение двигателя М от сети. После этого параллельный пускатель КМ1 опять включает двигатель, меняя при это крайние фазы местами, то есть заставляя его вращаться в обратную сторону. Чтобы не допустить чрезмерного перегрева в цепь может быть введено дополнительное сопротивление. Также схема противовключения может быть реализована, если двигатель использовать в качестве тормоза для груза.
Торможение самовозбуждением
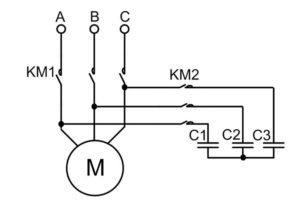
Схема торможения самовозбуждением
Этот вариант реализуется за счет подключения обмоток статора к параллельной конденсаторной батарее или мосту (расчет емкости придется вести). Когда двигатель отключается от сети и должен наступить режим выбега, угасающее магнитное поле начинает питать конденсаторы, а через них возвращается обратно в обмотку, создавая тормозной момент.
Как можно видеть, на практике используется целая гамма специфических режимов работы асинхронных двигателей, которыми можно добиться быстрой и точной его остановки. При частых пусках и остановках динамическое, рекуперативное, реверсное (на пускателях) или конденсаторное торможение (через расчет моста или батареи) могут повысить эффективность работ оборудования и снизить потери времени.

После отключения от сети электродвигатель продолжает движение по инерции. При этом кинетическая энергия расходуется на преодоление всех видов сопротивлений движению. Поэтому скорость электродвигателя через промежуток времени, в течение которого будет израсходована вся кинетическая энергия, становится равной нулю.
Такая остановка электродвигателя при движении по инерции называется свободным выбегом . Многие электродвигатели, работающие в продолжительном режиме или со значительными нагрузками, останавливают путем свободного выбега.
В тех же случаях, когда продолжительность свободного выбега значительна и оказывает влияние на производительность электродвигателя (работа с частыми пусками), для сокращения времени остановки применяют искусственный метод преобразования кинетической энергии, запасенной в движущейся системе, называемый торможением .
Все способы торможения электродвигателей можно разделить на два основных вида: механическое и электрическое.

При механическом торможении кинетическая энергия преобразуется в тепловую, за счет которой происходит нагрев трущихся и прилегающих к ним частей механического тормоза.
При электрическом торможении кинетическая энергия преобразуется в электрическую и в зависимости от способа торможения двигателя либо отдается в сеть, либо преобразуется в тепловую энергию, идущую на нагрев обмоток двигателя и реостатов.
Наиболее совершенными считают такие схемы торможения, при которых механические напряжения в элементах электродвигателя незначительны
Схемы динамического торможения асинхронных двигателей
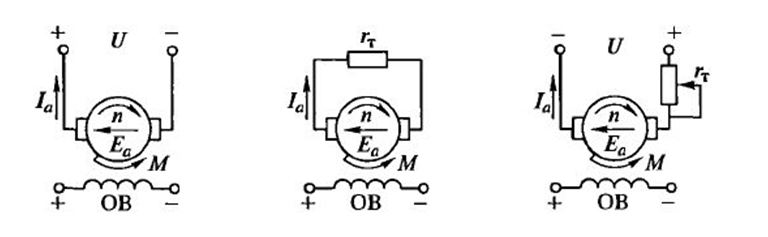
Для управления моментом при динамическом торможении асинхронным двигателем с фазным ротором по программе с заданием времени используются узлы схем, приведенные н а рис. 1, из которых схема р и с. 1, а применяется пр и наличии сети постоянного тока, а схема рис. 1, б — при отсутствии ее.
В качестве тормозных резисторов в роторе используются пусковые резисторы R1, включение которых в режиме динамического торможения производится отключением контакторов ускорения, показанных в рассматриваемых узлах схем условно в виде одного контактора КМ3, команда на отключение которого подается блокировочным контактом линейного контактора КМ1.
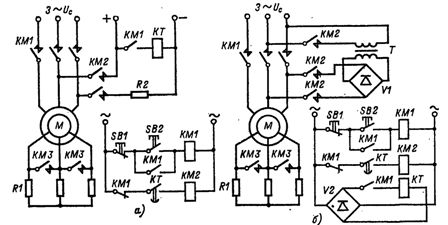
Рис. 1 Схемы управления динамическим торможением асинхронных двигателей с фазным ротором с заданием времени при наличии и отсутствии сети постоянного тока
Эквивалентное значение постоянного тока в обмотке статора при торможении обеспечивается в схеме рис. 1, а дополнительным резистором R2, а в схеме рис. 1. б соответствующим выбором коэффициента трансформации трансформатора Т.
Контактор торможения КМ2 может быть выбран как на постоянном, так и на переменном токе в зависимости от требуемого числа включений в час и использования пусковой аппаратуры.
Приведенные н а рис. 1 схемы управления могут использоваться для управления режимом динамического торможения асинхронного двигателя с короткозамкнутым ротором. Для этого обычно используется схема с трансформатором и выпрямителем, приведенная на р и с. 1 , б.
Схемы торможения противовключением асинхронных двигателей
При управлении моментом при торможении противовключением асинхронного двигателя с короткозамкнутым ротором с контролем скорости применяется узел схемы, приведенный на рис. 2.
В качестве реле противовключения используется реле контроля скорости SR, укрепляемое на двигателе. Реле настраивается на напряжение отпадания, соответствующее скорости, близкой к нулю и равной (0,1 — 0,2) ω уст.
Схема используется для остановки двигателя с торможением противовключением в реверсивной (рис. 2, а) в в нереверсивной (рис. 2, б) схемах. Команда SR используется для отключения контакторов КМ2 или КМЗ и КМ4, отключающих обмотку статора от напряжения сети при скорости двигателя, близкой к нулю. При реверсировании двигателя команды SR не используются.
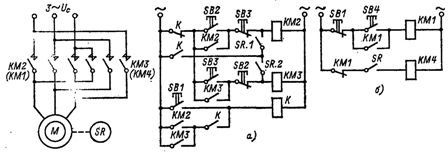
Рис. 2 Узлы схемы управления торможения противовключением асинхронного двигателя с коооткозамкнутым ротором с контролем скорости при остановке в реверсивной и нереверсивной схемах
Узел управления асинхронным двигателем с фазным ротором в режиме торможения противовключеиием с одной ступенью, состоящей из R1 и R2, приведен на рис. 3. Управляющее реле противовключения KV, в качестве которого применяется, например, реле напряжения постоянного тока типа РЭВ301, которое подключено к двум фазам ротора через выпрямитель V. Реле настраивается на напряжение отпадания.
Часто для настройки реле KV используется дополнительный резистор R3. Схема в основном применяется при реверсировании АД со схемой управления, приведенной на рис. 3, а, но может использоваться и при остановке в нереверсивной схеме управления, приведенной на рис. 3, б.
При пуске двигателя реле противовключения КV не вклгочатся и ступень противовключения резистора ротора R1 выводится сразу после подачи управляющей команды на пуск.
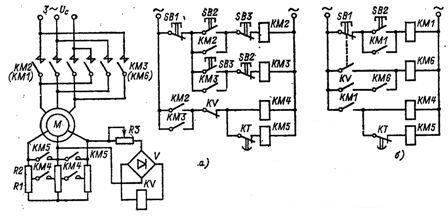
Реле KV отключает контакторы КМ4 и КМ5 и тем самым вводит полное сопротивление Rl + R 2 ротор двигателя.
В конце процесса торможения при скорости асинхронного двигателя, близкой к нулю и составляющей примерно 10 — 20 % установившейся начальной скорости ω пер = (0,1 — 0,2) ωуст , реле KV отключается, обеспечивая команду на отключение ступени противовключения R1 с помощью контактора КМ4 и на реверсирование электродвигателя в реверсивной схеме или команду на остановку электродвигателя в нереверсивной схеме.
В приведенных схемах в качестве управляющего устройства может применяться командоконтроллер и другие аппараты.
Схемы механического торможения асинхронных двигателей
При остановке асинхронных двигателей, а также для удержания механизма передвижения или подъема, например в крановых промышленных установках, в неподвижном состоянии при отключенном двигателе применяется механическое торможение. Оно обеспечивается электромагнитными колодочными или другими тормозами с трехфазным электромагнитом переменного тока, который при включении растормаживает тормоз. Электромагнит тормоза YB включается и отключается вместе с двигателем (рис 4, а).
Напряжение на электромагнит тормоза YB может подаваться контактором торможения КМ2, если нужно отключать тормоз не одновременно с двигателем, а с некоторой задержкой по времени, например после окончания электрического торможения (рис. 4, б)
Выдержку времени обеспечивает реле времени КТ, получающее команду на начало отсчета времени, обычно при отключении линейного контактора КМ1 (рис. 4, в).
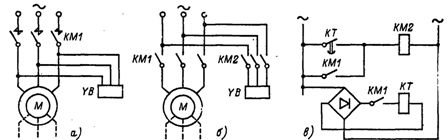
Рис. 4. Узлы схем, осуществляющих механическое торможение асинхронных двигателей
В асинхронных электроприводах применяются также электромагнитные тормоза постоянного тока при управлении электродвигателем от сети постоянного тока.
Схемы конденсаторного торможения асинхронных двигателей
Для торможения АД с короткозамкнутым ротором применяется также конденсаторное торможение с самовозбуждением. Оно обеспечивается конденсаторами C1 — С3, подключенными к обмотке статора. Включаются конденсаторы по схеме звезды (рис. 5, а) или треугольника (рис. 5, б).
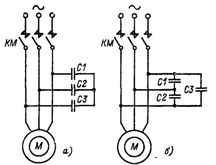
Рис. 5. Узлы схем, осуществляющих конденсаторное торможение асинхронных двигателей
Виды и схемы динамического торможения асинхронного двигателя
Электропривод является основой практического большинства современных механизмов. Одной из форм его работы является динамическое торможение асинхронного двигателя. Почему этот режим имеет такое значение и как он организовывается, попытаемся разобраться в этой статье.
Асинхронный двигатель и его работа
Очевидно, что режимы функционирования электродвигателей асинхронного типа напрямую зависят от их конструкции и общих принципов работы. Этот силовой агрегат совмещает в себе два ключевых компонента:
- Неподвижный статор. Пластинчатый цилиндр, в продольные пазы на внутренней поверхности которого укладывается проволочная обмотка,
- Вращающийся ротор. Совмещенный с валом сердечник (магнитопровод), который содержит прутковую обмотку на внешней стороне.
За счет различных частот вращения статора и ротора между ними возникает ЭДС, которая приводит вал в движение. Стандартное значение этого параметра может достигать 3000 об/мин, что требует определенного усилия для ее остановки. Из логических соображений можно заключить, что раз стартует двигатель за счет ЭДС, то и останавливать его тоже нужно электродинамическим путем.
Что такое динамическое торможение?
На этом месте может возникнуть закономерный вопрос: зачем что-то придумывать, если можно отключить двигатель от электросети, и он сам остановится? Это бесспорно так, но учитывая высокую частоту вращения и массо-центровочные характеристики, пройдет некоторое время до того момента, когда ротор полностью остановится. Этот период называется свободным выбегом и каждый в детстве его наблюдал, запуская простую юлу. Тем не менее, если работа оборудования предполагает частое использование пускателей, то такой режим приводит к очевидной потере времени.
Для быстрой остановки используются режимы торможения, которые предполагают трансформацию механической (в данном случае – кинетической) энергии искусственным путем. Все выделяют два основных вида торможения, которые подразделяются затем на подвиды:
- Механическое. Вал двигателя сообщается физически с тормозными колодками, вследствие чего возникает трение, быстрая остановка и выделение теплоты,
- Электрическое. Асинхронный двигатель останавливается за счет преобразования цепи подключения, вследствие чего механическая энергия трансформируется сперва в электрическую. Далее возможны два варианта ее израсходования, зависящие от схемы: либо избыток электричества выбрасывается в резервную цепь сети, либо трансформируется в тепло, за счет нагрева обмоток и сопротивления.
Динамическое торможение асинхронного двигателя относится к электрическому типу, так как в процессе обмотка статора отключается от сети с переменным током (две из трех фаз) и переводится в замкнутую цепь постоянного тока. При этом магнитное поле в статоре преобразуется из вращающегося в неподвижное. В роторе по-прежнему будет наводиться ЭДС, но момент будет направлен в обратную сторону, что приводит к торможению.
Главным преимуществом такого способа торможения является возможность плавно контролировать тормозящий момент (за счет изменения напряжения или сопротивления) и осуществлять точную остановку.
Основные виды динамического торможения
Организация принудительной остановки асинхронного двигателя по электрическому принципу может быть осуществлена несколькими способами:
- Электродинамическим. Это классический вариант, при котором две фазы нужно закоротить и перевести на питания от цепи постоянного тока,
- Рекуперативным (генераторным). Характеризуется возвратом лишней электроэнергии в сеть,
- Противовключением. Этот вариант реализуется по схеме реверса, то есть с подключением фаз через пару магнитных пускателей,
- Самовозбуждением. Подключением к обмоткам статора батареи конденсаторов.
Виды динамического торможения
Классическое динамическое торможение
Эффективность такого режима работы зависит от расчета и значения следующих параметров:
- Величина тока, который подается через параллельную цепь на обмотки статора. Чем выше этот показатель, тем больше момент торможения,
- Величина сопротивления, которое вводится в цепь ротора. Чем выше по расчету сопротивление, тем быстрее тормозится двигатель,
- Величина магнитной движущей силы (МДС). Иногда ее называют ампер витками, поскольку расчет ведется по формуле F = I×W, где I – величина тока, а W – количество витков.
Обмотка статора при этом может подключаться как минимум пятью разными способами:
- Треугольником,
- Треугольником с закороченными фазами,
- Звездой,
- Звездой с закороченным нулем,
- Звездой с закороченными двумя фазами.
В каждом случае на основании векторной диаграммы ведется расчет МДС, тормозного сопротивления и напряжения цепи.
Рекуперативное торможение
Режим рекуперативного торможения
Поскольку избыток электроэнергии, который высвобождается в процессе торможения, направляется обратно в сеть через мост/батарею конденсаторов, то этот режим работы считается наиболее экономичным. Наиболее часто этот способ применяется в подъемно-транспортной технике и оборудовании, которое работает на перемещение грузов или собственного веса под уклон. Классический пример – лифт, где рекуперативное торможение приводного двигателя используется для начального подтормаживания. Также подобная схема широко используется в электрифицированном транспорте, например, в трамваях, троллейбусах, электричках. Применяют ее и в специальной технике, например, экскаваторах, широко используемых на строительстве мостов, дорог, зданий и т. п.
Принцип расчета и организации генераторного режима заключается в превышении частотой вращения ротора ее синхронного значения. В таком случае электромагнитный момент меняет направление, что приводит к торможению.
Торможение противовключением
Схема торможения противовключением
На практике режим противовключения может быть организован несколькими разными способами. Классическим является использование пары магнитных пускателей, подключенных по реверсной схеме. В этом случае, быстрая остановка агрегата осуществляется за счет изменения положения фаз (противовключение).
Основной пускатель КМ2 производит отключение двигателя М от сети. После этого параллельный пускатель КМ1 опять включает двигатель, меняя при это крайние фазы местами, то есть заставляя его вращаться в обратную сторону. Чтобы не допустить чрезмерного перегрева в цепь может быть введено дополнительное сопротивление. Также схема противовключения может быть реализована, если двигатель использовать в качестве тормоза для груза.
Торможение самовозбуждением
Схема торможения самовозбуждением
Этот вариант реализуется за счет подключения обмоток статора к параллельной конденсаторной батарее или мосту (расчет емкости придется вести). Когда двигатель отключается от сети и должен наступить режим выбега, угасающее магнитное поле начинает питать конденсаторы, а через них возвращается обратно в обмотку, создавая тормозной момент.
Как можно видеть, на практике используется целая гамма специфических режимов работы асинхронных двигателей, которыми можно добиться быстрой и точной его остановки. При частых пусках и остановках динамическое, рекуперативное, реверсное (на пускателях) или конденсаторное торможение (через расчет моста или батареи) могут повысить эффективность работ оборудования и снизить потери времени.
Читайте также:
- Что такое объект исследования и предмет исследования в доу
- Рисовая каша на молоке как в детском саду рецепт в мультиварке
- Белый клык джек лондон краткое содержание для какого возраста
- Профессиональный стандарт педагога как ориентир подготовки нового учителя для современной школы
- Что такое накернивание в слесарном деле кратко