
Как между собой связаны векторный и координатный методы описания движения ответ кратко
Обновлено: 02.07.2024
16. Кинематика точки. Способы задания движения точки (векторный и координатный)
Кинематика изучает простейшую форму движения – механическое движение. Кинематически определить движение тела – это значит указать его положение относительно выбранной системы отсчета в каждый момент времени.
Движение материальной точки (в дальнейшем будем говорить просто точки) задано, если известен закон движения.
Закон движения. Закон движения – это уравнение, позволяющее определить положение точки относительно выбранной системы отсчета в любой момент времени.
Основная задача кинематики точки. По известному закону движения определить траекторию движения точки, ее положение на траектории, скорость и ускорение точки в ее положении на траектории.
Способы задания движения точки
В зависимости от выбора системы отсчета существуют три способа задания движения точки – векторный, координатный и естественный. Рассмотрим эти способы задания движения в отдельности.
Векторный способ задания движения точки
Пусть точка движется вдоль некоторой линии. В качестве начала отсчета выберем произвольный центр . Положение точки на линии определяется радиус-вектором (рис.К.9).

Таким образом, вектор определяет положение движущейся точки в любой момент времени. Следовательно, уравнение является законом движения при векторном способе задания движения.
Величина называется вектором скорости точки. Вектор скорости точки всегда направлен по касательной к годографу (траектории движения точки) в сторону перемещения точки.
Величина называется вектором ускорения точки.
Определим направление вектора . Направление вектора определяется направлением вектора . Пусть точка движется по некоторой траектории (рис.К.10) от точки к точке . Пусть скорость в точке равна , а скорость в точке равна . Перенесем вектор параллельно самому себе из точки в точку .

Как показано на рис.К.10, вектор направлен в сторону вогнутости траектории движения точки, следовательно и вектор ускорения всегда направлен в ту же сторону, то есть в сторону вогнутости траектории движения точки.
Координатный способ задания движения точки
Пусть точка движется вдоль некоторой линии. В качестве системы отсчета выберем декартовую систему координат с началом в произвольном центре . Тогда положение точки на линии определяются текущими координатами в любой момент времени

Следовательно, система уравнений определяют закон движения точки при координатном способе задания движения. Исключая из закона движения время , получим уравнение вида , являющееся уравнением траектории движения точки.
Пример. Закон движения записывается уравнениями . Найти уравнение траектории движения точки.
Решение. Из первого уравнения следует, что или . Тогда из второго уравнения . Или . Таким образом получено, что траекторией движения точки является прямая линия .
Компоненты скорости и ускорения движущейся точки в любой момент времени определяются по формулам
Движение. Виды движений. Описание движения. Система отсчета.
Механическим движением тела (точки) называется изменение его положения в пространстве относительно других тел с течением времени.
Виды движений:
А) Равномерное прямолинейное движение материальной точки.
Б) Равноускоренное прямолинейное движение материальной точки.
В) Движение тела по дуге окружности с постоянной по модулю скоростью.
Г) Гармоническое колебательное движение. Важным случаем механического движения являются колебания, при которых параметры движения точки (координаты, скорость, ускорение) повторяются через определенные промежутки времени.
Описания движения .
1. Векторный способ описания движения
ОПРЕДЕЛЕНИЕ: Векторный способ описания движения – это описание изменения радиус-вектора материальной точки в пространстве с течением времени.
Рассмотрим движение точки М в некоторой системе отсчета Oxyz (рис.1). Зададим радиус-вектор точки r — вектор, соединяющий начало координат с этой точкой.
При движении точки M вектор r будет с течением времени изменяться, т.е. будет каким-то образом зависеть от времени. Эта зависимость r = r ( t ) представляет собой закон движения в векторном виде.
В процессе движения конец радиус-вектора будет описывать траекторию, а его изменение – перемещение s точки.

2. Координатный способ описания движения
ОПРЕДЕЛЕНИЕ: Координатный способ описания движения – описание изменения во времени координат точки в выбранной системе отсчета.

При координатном способе положение точки в пространстве задается тремя координатами (рис.2). Выбор системы координат зависит от конкретной задачи. Можно работать в декартовой (прямоугольной) системе, иногда удобнее бывает сферическая или цилиндрическая системы координат.
В декартовой системе координат положение точки определяется тройкой чисел ( x , y , z ) — ее декартовыми координатами.
Чтобы задать закон движения точки, необходимо знать значения ее координат в каждый момент времени. Закон движения в координатном виде в общем случае представляет собой систему трех уравнений: x = x ( t ), y = y ( t ), z = z ( t )
Между векторным и координатным способом описания движения существует непосредственная связь, а именно: числовые значения проекций радиус-вектора движущейся точки на координатные оси системы с тем же началом отсчета равны координатам точки: rx = x , ry = y , rz = z .
3. Естественный способ описания движения
ОПРЕДЕЛЕНИЕ: Естественный способ описания движения – описание движения вдоль траектории. Этим способом пользуются, когда траектория точки заранее известна.
Пусть точка М движется вдоль траектории АВ в системе отсчета Oxyz (рис.3). Выберем на траектории какую-нибудь неподвижную точку О 1 , которую будем считать началом отсчета, и определим положительное и отрицательное направления. Тогда положение точки M будет определяться расстоянием S от точки О 1 . При движении точка М переместится в точку М 1 , соответственно изменится ее расстояние от точки О 1 . Таким образом, расстояние S зависит от времени, а характер этой зависимости позволит определить положение точки М на траектории в любой момент времени. Закон движения в этом случае имеет вид: s = s ( t ) .

Пример 1

Пример 2

Под системой отсчета понимают тело отсчета, которое условно считается неподвижным, систему координат, связанную с телом отсчета, и часы, также связанные с телом отсчета. В кинематике система отсчета выбирается в соответствии с конкретными условиями задачи описания движения тела.
Кинематическое описание движения – это задание положения тела относительно данной системы отсчета в любой момент времени или, другими словами, задание закона движения тела.
Существует три основных способа описания механического движения: векторный, координатный и естественный. Выбор способа описания зависит от условий конкретной задачи.
Векторный способ описания движения
Векторный способ описания движения – это описание изменения радиус-вектора материальной точки в пространстве с течением времени.

— вектор, соединяющий начало координат с этой точкой.
При движении точки вектор " width="9" height="11" />
будет с течением времени изменяться, т.е. будет каким-то образом зависеть от времени. Эта зависимость =\overline(t)" width="63" height="18" />
представляет собой закон движения в векторном виде.

точки.

Координатный способ описания движения
Координатный способ описания движения – описание изменения во времени координат точки в выбранной системе отсчета.

При координатном способе положение точки в пространстве задается тремя координатами (рис.2). Выбор системы координат зависит от конкретной задачи. Можно работать в декартовой (прямоугольной) системе, иногда удобнее бывает сферическая или цилиндрическая системы координат.
В декартовой системе координат положение точки определяется тройкой чисел — ее декартовыми координатами.
Чтобы задать закон движения точки, необходимо знать значения ее координат в каждый момент времени. Закон движения в координатном виде в общем случае представляет собой систему трех уравнений:
![\[ \begin</p>
<p> x=x(t) \\ y=y(t) \\ z=z(t) \end \]](http://ru.solverbook.com/wp-content/ql-cache/quicklatex.com-a40db1285985e9782b17adf819cd7040_l3.jpg)
Между векторным и координатным способом описания движения существует непосредственная связь, а именно: числовые значения проекций радиус-вектора движущейся точки на координатные оси системы с тем же началом отсчета равны координатам точки:
![\[ r_<x></p>
<p>=x \text< >;\text < >r_=y \text< >;\text < >r_=z \]](http://ru.solverbook.com/wp-content/ql-cache/quicklatex.com-42ccee18bfbe7be4286c2b20fdbe6a77_l3.jpg)
Естественный способ описания движения
Естественный способ описания движения – описание движения вдоль траектории. Этим способом пользуются, когда траектория точки заранее известна.
Пусть точка движется вдоль траектории в системе отсчета (рис.3). Выберем на траектории какую-нибудь неподвижную точку , которую будем считать началом отсчета, и определим положительное и отрицательное направления. Тогда положение точки M будет определяться расстоянием от точки . При движении точка переместится в точку , соответственно изменится ее расстояние от точки . Таким образом, расстояние зависит от времени, а характер этой зависимости позволит определить положение точки на траектории в любой момент времени. Закон движения в этом случае имеет вид: .

| Задание | Тело переместилось из точки с координатами в точку с координатами . Сделать чертеж. На чертеже показать радиус-векторы. Определить перемещение и его проекции на оси координат. |
| Решение | Сделаем чертеж |

" width="29" height="16" />
– радиус-вектор точки , " width="31" height="16" />
– радиус-вектор точки .

— вектор перемещения.
Проекции вектора перемещения на координатные оси на чертеже выделены зеленым цветом и равны (проекция на ось ) и (проекция на ось ).
Модуль вектора перемещения:

(масштабных единиц)
| Задание | Тело начало движение из точки , дошло до точки м, затем начало двигаться обратно и дошло до точки м. Считая движение прямолинейным, показать на чертеже расположение точек на траектории. Определить перемещение тела и расстояние, которое тело прошло за время движения. |
| Решение | Сначала сделаем чертеж |


, то есть вектор, соединяющий начальное и конечное положения тела.

м.
Тело отсчета – произвольно выбранное тело, относительно которого рассматривается положение материальной точки.
Материальная точка – тело, обладающее массой, размерами которого в данных условиях можно пренебречь.
Система отсчета – совокупность системы координат и часов, связанных с телом отсчета.
Координатный способ: положение материальной точки характеризуется в данный момент времени тремя координатами по отношению к декартовой системе координат: x, y, z (рис. 1). При ее движении координаты с течением времени изменяются. В общем случае движение материальной точки определяется скалярными уравнениями: x=x(t), y=y(t), z=z(t).
Векторный способ: положение материальной точки характеризуется в данный момент времени радиусом-вектором , проведенным из начала системы координат в данную точку (рис. 1). В общем случае движение материальной точки определяется векторным уравнением: .
Уравнения x=x(t), y=y(t), z=z(t), называются кинематическими уравнениями движения материальной точки.
В кинематике существуют три способа аналитического описания движения материальной точки в пространстве. Рассмотрим их, ограничившись случаем движения материальной точки на плоскости, что позволит нам при выборе системы отсчёта задавать лишь две координатные оси.
1. Векторный способ.
В этом способе положение материальной точки `A` задаётся с помощью так называемого радиус-вектора `vecr`, который представляет собой вектор, проведённый из точки `O`, соответствующей началу отсчёта выбранной системы координат, в интересующую нас точку `A` (рис. 1). В процессе движения материальной точки её радиус-вектор может изменяться как по модулю, так и по направлению, являясь функцией времени `vecr=vecr(t)`.
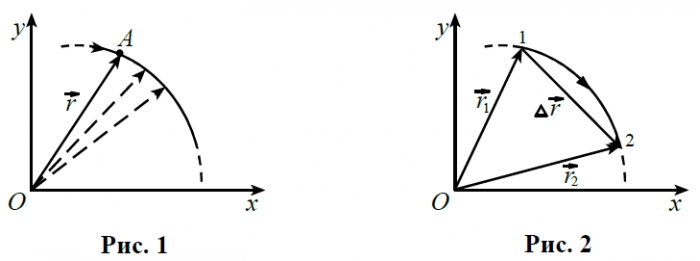
Геометрическое место концов радиус-вектора `vecr(t)` называют траекторией точки `A`.
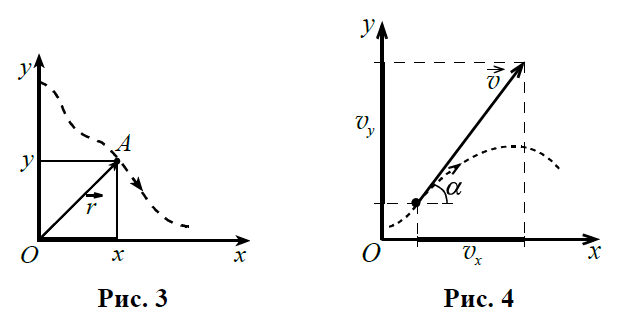
Пусть в процессе движения по некоторой траектории в выбранной системе отсчёта за промежуток времени `Delta t` тело (точка `A`) переместилось из начального положения `1` с радиус-вектором `vec r_1` в конечное положение `2` с радиус-вектором `vec r_2` (рис. 2). Приращение `Deltavec r` радиус-вектора тела в таком случае равно: `Deltavec r = vec r_2- vec r_1`.
Вектор `Deltavec r`, соединяющий начальное и конечное положения тела, называют перемещением тела.
Отношение `Delta vec r//Delta t` называют средней скоростью (средним вектором скорости) `vec v_"cp"` тела за время `Delta t`:
`vecv_"cp"=(Deltavecr)/(Delta t)` (1)
Вектор `vecv_"cp"` коллинеарен и сонаправлен с вектором `Deltavec r`, так как отличается от последнего лишь скалярным неотрицательным множителем `1//Delta t`.
Предложенное определение средней скорости справедливо для любых значений `Delta t`, кроме `Delta t=0`. Однако ничто не мешает брать промежуток времени `Delta t` сколь угодно малым, но отличным от нуля.
Для точного описания движения вводят понятие мгновенной скорости, то есть скорости в конкретный момент времени `t` или в конкретной точке траектории. С этой целью промежуток времени `Delta t` устремляют к нулю. Вместе с ним будет стремиться к нулю и перемещение `Delta vec r`. При этом отношение `Deltavec r//Delta t` стремится к определённому значению, не зависящему от `Delta t`.
Величина, к которой стремится отношение `Deltavec r//Delta t` при стремлении `Delta t` к нулю, называется мгновенной скоростью`vec v`:
`vec v =(Delta vec r)/(Delta t)` при `Delta t -> 0`.
Теперь заметим, что чем меньше `Delta t`, тем ближе направление `Deltavec r` к направлению касательной к траектории в данной точке. Следовательно, вектор мгновенной скорости направлен по касательной к траектории в данной точке в сторону движения тела.
Движение тела принято характеризовать также ускорением, по которому судят об изменении скорости в процессе движения. Его определяют через отношение приращения вектора скорости `Delta vec v` тела к промежутку времени `Delta t`, в течение которого это приращение произошло.
Ускорением `veca` тела называется величина, к которой стремится отношение `Delta vec v//Delta t` при стремлении к нулю знаменателя `Delta t`:
`vec a =(Delta vec v)/(Delta t)` при `Delta t -> 0` (2)
При уменьшении `Delta t` ориентация вектора`Delta vec v` будет приближаться к определённому направлению, которое принимается за направление вектора ускорения `vec a`. Заметим, что ускорение направлено в сторону малого приращения скорости, а не в сторону самой скорости!
Напомним, что в системе СИ единицами длины, скорости и ускорения являются соответственно метр (м), метр в секунду (`"м"//"с"`) и метр на секунду в квадрате ( `"м"//"с"^2`).
2. Координатный способ.
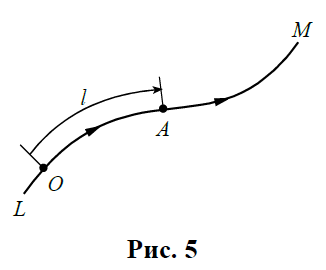
В этом способе положение материальной точки `A` на плоскости в произвольный момент времени `t` определяется двумя координатами `x` и `y`, которые представляют собой проекции радиус-вектора $$ \overrightarrow$$тела на оси `Ox` и `Oy` соответственно (рис. 3). При движении тела его координаты изменяются со временем, т. е. являются функциями `t`: $$ x=x\left(t\right)$$ и $$ y=y\left(t\right)$$. Если эти функции известны, то они определяют положение тела на плоскости в любой момент времени. В свою очередь, вектор скорости $$ \overrightarrow$$ можно спроецировать на оси координат и определить таким образом скорости $$ _$$ и $$ _$$ изменения координат тела (рис. 4). В самом деле $$ _$$ и $$ _$$ будут равны значениям, к которым стремятся соответственно отношения `Delta x//Delta t` и `Delta y//Delta t` при стремлении к нулю промежутка времени `Delta t`.
3. Естественный (или траекторный) способ.
Этот способ применяют тогда, когда траектория материальной точки известна заранее. На заданной траектории `LM` (рис. 5) выбирают начало отсчёта – неподвижную точку `O`, а положение движущейся материальной точки `A` определяют при помощи так называемой дуговой координаты `l`, которая представляет собой расстояние вдоль траектории от выбранного начала отсчёта `O` до точки `A`. При этом положительное направление отсчёта координаты `l` выбирают произвольно, по соображениям удобства, например так, как показано стрелкой на рис. 5.
Движение тела определено, если известны его траектория, начало отсчёта `O`, положительное направление отсчёта дуговой координаты `l` и зависимость $$ l\left(t\right)$$.
Следующие два важных механических понятия – это пройденный путь и средняя путевая скорость.
По определению, путь `Delta S` - это длина участка траектории, пройденного телом за промежуток времени `Delta t`.
Ясно, что пройденный путь – величина скалярная и неотрицательная, а потому его нельзя сравнивать с перемещением `Delta vec r`, представляющим собой вектор. Сравнивать можно только путь `Delta S` и модуль перемещения `
|Delta vecr|`. Очевидно, что `Delta S >=|Deltavec r|`.
Средней путевой скоростью `v_"cp"` тела называют отношение пути `Delta S` к промежутку времени `Delta t`, в течение которого этот путь был пройден:
`v_"cp"=(Delta S)/(Delta t)` (3)
Городской троллейбус утром вышел на маршрут, а через 8часов, проехав в общей сложности `72` км, возвратился в парк и занял своё обычное место на стоянке. Какова средняя скорость `vec v_"cp"` и средняя путевая скорость `v_"cp"` троллейбуса?
Поскольку начальное и конечное положения троллейбуса совпадают, то его перемещение `Delta vecr` равно нулю: `Deltavecr=0`, следовательно, `vecv_"ср"=Deltavecr//Deltat=0` и `|vecv_"ср"|=0`. Но средняя путевая скорость троллейбуса не равна нулю:
Читайте также: