
Что такое степень свободы кинематической пары кратко
Обновлено: 05.07.2024
Теория механизмов и машин — Теория машин и механизмов (ТММ) это научная дисциплина об общих методах исследования, построения, кинематики и динамики механизмов и машин и о научных основах их проектирования. Содержание 1 История развития дисциплины 2 Основные понятия … Википедия
Механизм — (греч. μηχανή mechané машина) это совокупность совершающих требуемые движения тел (обычно деталей машин), подвижно связанных и соприкасающихся между собой. Механизмы служат для передачи и преобразования движения … Википедия
Механизмы — Механизм это совокупность тел (обычно деталей машин), ограничивающих свободу движения друг друга взаимным сопротивлением. Механизмы служат для передачи и преобразования движения. Механизм паровой машины имеет одну степень свободы. Дифференциал… … Википедия
Механизм — (от греч. mechane машина) система тел, предназначенная для преобразования движения одного или нескольких тел в требуемые движения др. тел. М. составляют основу большинства машин (См. Машина), применяются во многих приборах, аппаратах и… … Большая советская энциклопедия
_о словаре — РАЗДЕЛЫ: ОБЩИЕ ПОНЯТИЯ ТЕОРИИ МЕХАНИЗМОВ И МАШИН СТРУКТУРА МЕХАНИЗМОВ ДИНАМИКА МЕХАНИЗМОВ КОЛЕБАНИЯ В МЕХАНИЗМАХ … Теория механизмов и машин

Под числом степеней свободы кинематической цепи подразумевается число степеней свободы подвижных звеньев относительно стойки (звена, принятого за неподвижное). Однако сама стойка в реальном пространстве может перемещаться.
Как отмечалось выше, число входных звеньев для превращения кинематической цепи в механизм должно равняться числу степеней свободы этой кинематической цепи.
Например, любое неподвижное тело на Земле имеет нулевую степень свободы, но в Мировом пространстве вместе с Землей оно перемещается, используя все шесть степеней свободы.
Другой пример: кинематическая цепь, положенная в основу поршневого двигателя, имеет одну степень свободы относительно стойки (звена, принятого при исследовании за неподвижное, которое состоит из цилиндра, присоединенного к картеру и раме или корпусу автомобиля, мотоцикла или другой машины), хотя при движении машины сама стойка также перемещается.
Однако, независимо от того движется машина или нет, характер движения звеньев поршневого двигателя относительно стойки остается неизменным.
Введем следующие обозначения:
k – число звеньев кинематической цепи;
p1 – число кинематических пар первого класса в данной цепи;
p2 – число пар второго класса;
p3 – число пар третьего класса;
p4 – число пар четвертого класса;
p5 – число пар пятого класса.
Общее число степеней свободы k свободных звеньев, размещенных в пространстве, равно 6k. В кинематической цепи они соединяются в кинематические пары (т.е. на их относительное движение накладываются связи).
Кроме того, в качестве механизма используется кинематическая цепь, имеющая стойку (звено, принятое за неподвижное). Поэтому число степеней свободы кинематической цепи будет равно общему числу степеней свободы всех звеньев за вычетом связей, накладываемых на их относительное движение:
Число связей, накладываемых всеми парами I класса, равно их числу, т.к. каждая пара первого класса накладывает одну связь на относительное движение звеньев, соединенных в такую пару; число связей, накладываемых всеми парами II класса, равно их удвоенному количеству (каждая пара второго класса накладывает две связи) и т.д.
У звена, принятого за неподвижное, отнимаются все шесть степеней свободы (на стойку накладывается шесть связей). Таким образом:
а сумма всех связей
В результате получается следующая формула для определения числа степеней свободы пространственной кинематической цепи:
Сгруппировав первый и последний члены уравнения, получаем:
где n – число подвижных звеньев кинематической цепи.
Данное уравнение носит название структурной формулы кинематической цепи общего вида.
Формула была получена впервые ( в несколько ином виде) П.И. Сомовым в 1887 г., и развита А.П. Малышевым в 1923 г. Поэтому ее часто называют формулой Сомова-Малышева. В некоторых учебниках ее называют формулой Малышева – по авторству окончательного варианта.
Примечание: авторы некоторых учебников придают иной смысл индексу при обозначении числа кинематических пар pi , а именно:
p1 – число одноподвижных пар (т.е. кинематических пар, обеспечивающих одну степень свободы в относительном движении),
p2 – число двухподвижных пар и т.д.
То есть индекс в данном случае показывает не число связей, а число степеней свободы и в формуле обозначения p1 и p5 , а также p2 и p4 меняются местами. Поэтому при использовании различных учебников необходимо внимательно следить за интерпретацией автора, т.к., к сожалению, часто разные авторы в одно и то же обозначение вкладывают разный смысл. В результате при одних и тех же обозначениях одни и те же формулы имеют различный вид.
В манипуляторах и промышленных роботах используются разомкнутые (открытые) кинематические цепи. В таких цепях число подвижных звеньев равно общему числу кинематических пар:
Таким образом, число степеней свободы разомкнутой кинематической цепи равно сумме подвижностей (степеней свободы) кинематических пар, входящих в эту цепь. Кроме степеней свободы на качество работы манипуляторов и промышленных роботов большое влияние оказывает их маневренность.
Маневренность – это число степеней свободы манипулятора при неподвижном захвате. Она определяет способность манипулятора (промышленного робота) обходить препятствия и вычисляется по следующей формуле:
где M – маневренность манипулятора.
Как было отмечено выше, значительное число применяемых на практике механизмов являются плоскими механизмами (т.е. в их основе лежат плоские кинематические цепи). Помещение кинематической цепи в плоскость накладывает три общие связи на движение всех звеньев этой цепи, поэтому k свободных звеньев, помещенных в плоскость, имеют в общей сложности 3k степеней свободы.
На плоскости существуют только пары четвертого и пятого классов. На кинематическую пару четвертого класса приходится одна связь (в дополнение к трем общим связям, приходящимся на плоскость); на пару пятого класса приходится две связи; у стойки отнимаются все три степени свободы. Таким образом:
Это есть структурная формула для плоской кинематической цепи.
Эта формула впервые была предложена П.Л. Чебышевым в 1869 г. и ее часто называют формулой Чебышева.
Формула Чебышева (как в прочем и формула Сомова-Малышева) дает абсолютно правильный результат для общего случая кинематической цепи, состоящей из соответствующего числа звеньев и кинематических пар.
Однако конструктор из множества размеров и форм звеньев может подобрать такие, которые обеспечат подвижность цепи при нулевой степени свободы, или обеспечить работоспособность механизма с помощью одного двигателя при числе степеней свободы больше единицы. То есть, как и в большинстве случаев жизни, здесь имеются исключения из правил.
Если кинематическая цепь, имеющая в соответствии с формулой Чебышева нулевую степень свободы, оказывается подвижной, это означает, что в данной цепи имеются пассивные (избыточные) связи. При исследовании механизма в этом случае звенья, создающие пассивные связи, просто удаляются из рассмотрения.

На рисунке 4а показана кинематическая схема механизма эллипсографа (W=3 ∙ 3 – 2 ∙ 4 = 1). Он обладает следующими свойствами: точки A и B движутся поступательно вдоль осей X и Y как принадлежащие ползунам 1 и 3.
При этом точка M описывает эллипс с малой полуосью, равной отрезку AM и расположенной вдоль оси Y, и с большой полуосью BM, расположенной вдоль оси X (т.е. эллипс, вытянутый вдоль оси X); точка N описывает эллипс с малой полуосью BN и с большой полуосью AN, вытянутый вдоль оси Y.
Однако, если звено 5 присоединить вторым шарниром к звену AB в точке C (рисунок 4в), то движение точки C, принадлежащей звену 5, и движение точки C, принадлежащей звену AB, становятся согласованными – обе точки движутся по одной и той же траектории (по окружности радиуса OC).
Наличие пассивных связей можно установить построением нового положения заданной кинематической цепи с нулевой (или отрицательной) степенью свободы по тем же размерам звеньев. Если цепь строится в других положениях, она имеет пассивные связи. Если же размеры не стыкуются в новом положении, то это действительно неподвижная система – ферма (при отрицательном числе степеней свободы – ферма статически неопределимая).
Лишние степени свободы – если в механизме имеется движение какого-либо звена, не влияющее на движение остальных звеньев этого механизма, то оно дает лишнюю степень свободы.

Обычно лишняя степень свободы образуется при наличии круглого ролика. Вращаясь вокруг собственной оси, он не изменяет характера движения остальных звеньев.
На рисунке 5а изображен механизм с некруглым роликом – здесь положение толкателя 2 будет зависеть не только от положения кулачка, но и от положения ролика. То есть механизм действительно имеет две степени свободы. В механизме на рисунке 5б ролик круглый и его угол поворота не влияет на положение толкателя – положение толкателя полностью определяется положением кулачка.
Таким образом, фактически механизм имеет одну действующую степень свободы (вращение ролика вокруг собственной оси дает формально вторую степень свободы, но это движение не оказывает влияния на движение остальных звеньев механизма).
При исследовании механизма удобно избавиться от лишней степени свободы. Для этого надо практический профиль заменить теоретическим – эквидистантным профилем, проходящим через центр ролика, и удалить ролик из рассмотрения (рисунок 5в).
Отдельно взятое звено (твердое тело) имеет в пространстве шесть степеней свободы. Если два звена связаны между собой кинематической парой, то на движение одного из них относительно другого налагаются ограничения, выражающиеся условиями связи — зависимостями между значениями координат относительного положения звеньев или равенством некоторых координат постоянным величинам. Оставшееся в относительном движении звеньев число степеней свободы

где S — число условий связи кинематической пары, для которой оно является основной структурной характеристикой.
Классификация кинематических пар
Низшие пары и примеры высших пар (стрелками показаны возможные движения)

Класс I. Число условий связи 1. Число степеней свободы 5 (возможны только высшие пары с точечным контактом).

Класс II. Число условий связи 2. Число степеней свободы 4 (возможны только высшие пары).

Класс III. Число условий связи 3. Число степеней свободы 3 (Возможны как высшие, так и низшие пары, показаны все типы низших пар).

Класс IV. Числоусловий связи 4. Число степеней свободы 2 (возможны как высшие, так и низшие пары, показаны все типы низших пар).

Класс V. Число условий связи 5. Число степеней свободы 1 (возможны как высшие, так и низшие пары, показаны все типы низших пар).
По числу условий связи кинематические пары разделяются на пять классов. При S = 6 кинематическая пара вырождается в неподвижное соединение [1].
По характеру соприкосновения элементов кинематические пары разделяются на низшие, высшие и смешанные. Низшие пары имеют соприкосновение элементов по поверхностям, высшие — по линиям или в точках.
Низшие пары применяются в практике шести типов: шаровая и плоскостная (III класс), цилиндрическая (IV класс), вращательная, поступательная и винтовая (V класс).
Во всех низших парах, кроме винтовой, условия связи исключают возможность определенного числа движений относительно соответственно выбранных осей прямоугольной системы координат, в винтовой же паре четыре условия связи исключают возможность четырех из указанных движений, а пятое условие устанавливает зависимость между оставшимися двумя движениями (hx и фх):

где hx— линейное перемещение звена вдоль оси х; фх—угловое перемещение звена вокруг оси х в радианах; t —постоянный шаг резьбы, равный перемещению звена вдоль оси х за один
Элементы шаровой, плоскостной и цилиндрической пары могут состоять соответственно из концентрических шаровых поверхностей, параллельных плоскостей, соосно расположенных круглых цилиндрических поверхностей. В шаровых и цилиндрических парах каждый элемент обычно состоит из одной поверхности, в плоскостной паре — из одной или двух поверхностей.
Элементы вращательной пары могут состоять из любых поверхностей вращения, но практическое применение находят простые по форме и легко обрабатываемые частные виды этих поверхностей— плоскости, цилиндрические, конические и шаровые поверхности.
На расположение поверхностей в элементе вращательной пары накладываются следующие условия: плоскости должны быть перпендикулярны геометрической оси элемента, оси цилиндрических и конических поверхностей должны совпадать с осью элемента, а центры шаровых поверхностей должны лежать на этой оси.
Элементы поступательной пары образуются из любых цилиндрических поверхностей. Применение имеют простейшие по форме частные виды этих поверхностей — плоскости и круглые цилиндрические поверхности, а также некоторые частные виды не круглых цилиндрических поверхностей — эвольвентного профиля и др.
На расположение поверхностей в элементе поступательной пары накладывается следующее условие: образующие всех цилиндрических поверхностей и все плоскости должны быть параллельны направлению относительного движения звеньев, связываемых парой.
Элементы винтовых пар получаются из соосно расположенных винтовых поверхностей одинакового шага и направления. Применение в элементах винтовой пары наряду с винтовыми поверхностями также круглой цилиндрической поверхности облегчает получение точного центрирования и направления звеньев.
Высшие пары возможны всех пяти классов и неограниченного числа типов — со всевозможными сочетаниями условий связи.
Особенно большое распространение на практике получили высшие пары:
а) кулачкового типа, позволяющие осуществлять движение ведомого звена, вообще говоря, по любому наперед заданному закону;
б) зубчатые, обычно используемые для передачи вращательного движения или преобразования вращательного движения в прямолинейнопоступательное с постоянными отношениями скоростей.
Кинематические пары могут быть геометрически замкнутыми или геометрически незамкнутыми. В первом случае постоянное соприкосновение элементов пары обеспечивается их формой, во втором — какой-либо силой — веса, упругости пружин, магнитного притяжения (силовое замыкание) — или ограничениями, налагаемыми на относительное движение
связываемых звеньев другими звеньями механизма (замыкание через кинематическую цепь).

Отзывов: 0 | Написать отзыв
Робот — это по определению подвижная машина. Он либо двигается сам, либо у него двигаются отдельные части, либо двигается все сразу. А это значит, что при его сборке есть необходимость в создании соединений деталей, которые позволяли бы двигаться им относительно друг друга.
Для этого потребуется познакомиться с такой наукой, как механика. В частности с ее разделом, который изучает математическое описание движения тел в упрощенном, идеализированном виде. Он называется кинематикой (от греческого слова κινειται - двигаться).
В кинематике тела, участвующие в движении, называются звеньями. А соединение звеньев, в котором они движутся относительно друг друга, именуется кинематической парой, то есть два звена образуют взаимно подвижное соединение.
Звенья в кинематике представляются в виде идеализированных тел. А при сборке роботов из конструктора используются реальные детали, которые по геометрии и форме совершенно не похожи на идеальные тела. Те не менее, все математические закономерности и принципы, которые формулирует кинематика, точно так же применимы и к настоящим деталям. В этом вы уже скоро сможете убедиться при выполнении практических проектов. Поэтому материал данного параграфа очень важен для понимания в дальнейшем правил создания конструкций робота.
Звенья в кинематической паре могут двигаться взаимно совершенно по-разному. В разных парах у звеньев может быть много подвижностей или мало, они могут вращаться или двигаться прямолинейно. По характеру движения существует 8 видов кинематических пар. Рассмотрим их с точки зрения понимания механики роботов.
Для объяснения особенностей кинематических пар потребуется понимание, что из себя представляют координаты точки или твердого тела. Когда движется робот или элементы его конструкции, они перемещаются в пространстве. То есть меняется одно местоположение на другое.
Что и как может рассказать об этом перемещении? Как его зафиксировать? Как его выразить количественно?
Эта задача давным-давно решена с помощью системы координат.
Координаты — это числа, заданием которых определяется положение точки или тела на плоскости, на любой поверхности или в пространстве.
Система координат — это система отсчета, которая используется для определения положения точки или тела в пространстве.
Координатами в выбранной системе координат определяется местоположение робота и его частей в процессе движения. С их помощью выполняется управление роботом: задаются конкретные координаты, и он перемещается в соответствующее место. Поэтому координаты и система координат— это важнейшие математические понятия, на которых стоит наука робототехника.
В §1.5 мы уже касались систем координат. На рисунке 1.5.5 показаны их разновидности на примере разных конструкций промышленных роботов. В промышленной робототехнике наибольшее распространение получили манипуляторы, работающие в угловой системе координат. Однако изучение принципов использования систем координат для управления машинами и механизмами проще всего начинать с прямоугольной системы. Она получила еще название декартовой системы координат по имени ученного, придумавшего ее. Такая система представляет собой точку отсчета, из которой расходятся перпендикулярно друг другу три оси, обозначенные X, Y, Z.
Базовым понятием кинематики является материальная точка. Это тело с очень маленькими размерами, которыми можно пренебречь. Соответственно, расположение точки однозначно задается тремя числами, отложенными по своим осям. Например, на рисунке 2.5.1 показано расположение материальной точки в прямоугольной системе координат. По осям отложены расстояния, например, в метрах. Таким образом, на указанном рисунке точка имеет координаты Хт = 2,5 м, Yт = 3,7 м, Zт = 2,7 м.
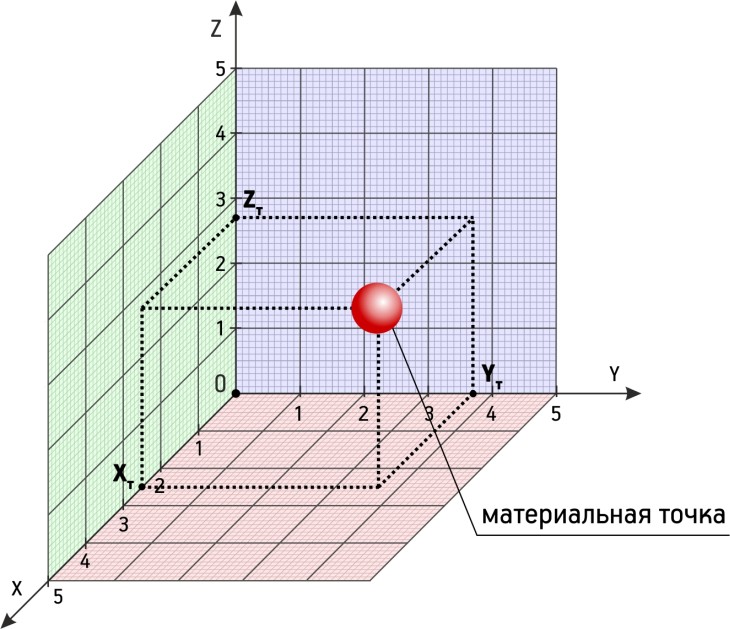 |
| Рис. 2.5.1. Расположение материальной точки в декартовой системе координат и определение ее координат по осям |
С помощью именно такой системы координат описываются кинематические пары, которые соответствуют возможным вариантам соединения деталей и узлов. Только есть важное дополнение. Декартова система координат позволяет определить положение точки. А кинематические пары составляются из звеньев, представляющих собой твердые тела с размерами, которыми уже пренебрегать нельзя. И для того чтобы определить положение одного звена относительного другого, необходимо задать не только координаты какой-либо точки этого тела (условный центр тела или какая-либо характерная точка), но и углы поворота тела относительно данной точки.
Итого получается, что для однозначного определения положения тела в пространстве необходимы 3 координаты положения точки тела (например его геометрического центра) в декартовой системе координат и 3 угла поворота тела относительно этой точки. Сложив их, получим 6 координатных количественных характеристик, которые могут независимо друг от друга изменяться и которые однозначно задают положение тела (рис. 2.5.2).
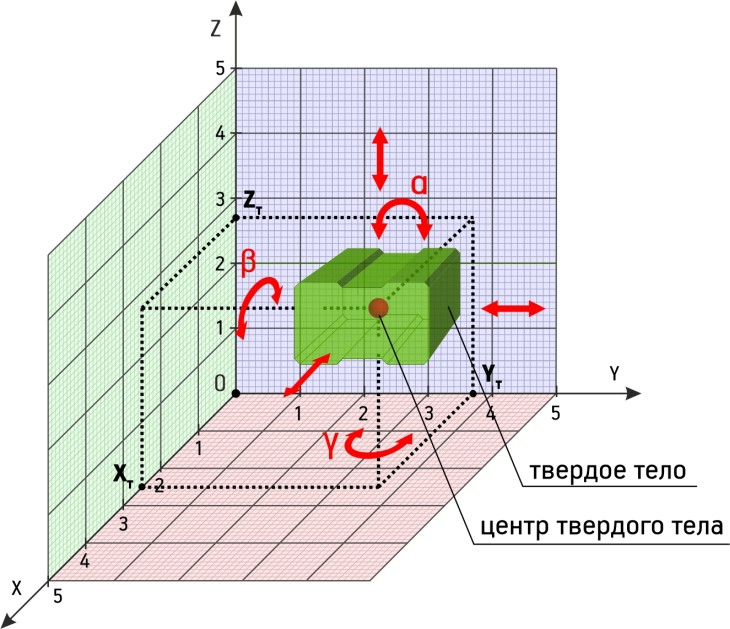 |
| Рис. 2.5.2. Описание местоположения и ориентации твердого тела по координатам его центра и углам поворота относительно координатных осей |
Отсюда возникает еще одно очень важно понятие в робототехнике, с которым связаны кинематические пары — степень свободы. Если совсем просто, то степень свободы — это координата одного звена относительно второго звена, которая может независимо изменяться во время их взаимного движения. То есть она описывает подвижность звена по конкретной координатной характеристике. Если же координата не может изменяться в силу конструкции пары, то она называется связью. Сумма степеней свободы и связей для твердого тела всегда равна 6.
На всех картинках звенья, образующие пару, имеют разные цвета. Звено №1 красное, а звено №2 зеленое. Любое взаимное движение двух звеньев можно представить как движение одного звена относительно второго. Поэтому допустим, что звено №1 неподвижно относительно выбранной системы координат. А второе звено двигается. Получается, что его координаты относительно первого звена при движении изменяются. Возможные движения звена показаны стрелочками. Если при этом изменяются координаты в прямоугольной системе координат, то они обозначены буквами Xзв2, Yзв2, Zзв2, стрелочки при этом прямые. Возможные вращения обозначены буквами αзв2, βзв2, γзв2 и стрелочки в этом случае изображены в виде дуги.
| Название пары | Внешний вид | Число степеней свободы | Описание |
| Вращательная | 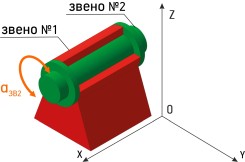 | 1 | В данной кинематической паре цилиндрическое звено №2 может только вращаться в ответной цилиндрической части первого звена. Положение звена №2 полностью определяется углом поворота αзв2. |
| Винтовая | 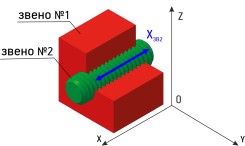 | 1 | Это кинематическая пара, в которой оба звена имеют винтовую поверхность в виде резьбы или специальных направляющих. При вращении звена №2 оно линейно перемещается внутри звена №1. Вращение звена и его линейное перемещение жестко связаны. Поэтому при движении звена №2 изменяется только его координата Хзв2 по оси координат Х. |
| Поступательная | 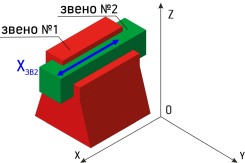 | 1 | Особенность конструкции поступательной кинематической пары заключается в том, что звено №2 может перемещаться по направляющему звену №1 только линейно в одном направлении. Поворот невозможен по причине нецилиндрического сечения. Соответственно, местоположение звена №2 однозначно определяется одной координатой Хзв2. |
| Цилиндрическая | 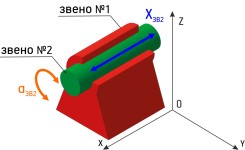 | 2 | Цилиндрическая пара похожа на вращательную, но отличается от нее тем, что у звена №2 нет выступов, мешающих его перемещению по оси Х. Поэтому звено №2 может не только вращаться, но и двигаться по оси Х. Таким образом, местоположение задается углом поворота αзв2 и координатой Хзв2. |
| Плоскостная | 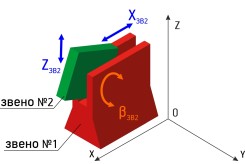 | 3 | Плоскостная пара означает, что звено №2 имеет плоские поверхности, через которые она контактирует с такими же плоскими поверхностями звена №1. Такое соединение допускает линейное перемещение по двум координатам (Хзв2 и Zзв2 на рисунке) и вращение (угол поворота βзв2). |
| Сферическая | 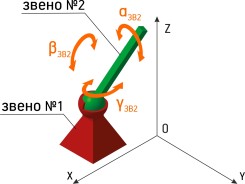 | 3 | Звено №2 в сферической паре может исключительно вращаться. Контакт шара с внутренней сферической поверхностью не допускает линейных перемещений. Поэтому положение звена №2 полностью задается тремя углами поворота αзв2, βзв2, γзв2. |
| Линейная | 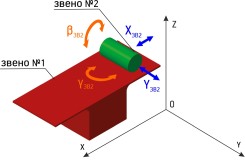 | 4 | Линейная пара — это пара звеньев, одно из которых имеет цилиндрическую или коническую форму, а второе представляет собой плоскую поверхность. При таком соединении контакт звеньев происходит по линии. Получается, что звено №2 может поворачиваться в двух плоскостях (углы βзв2, γзв2) и перемещаться по двум осям (координаты Xзв2, Yзв2). |
| Точечная | 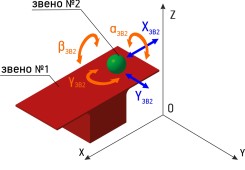 | 5 | Контакт (связь) по точке (отсюда название точечной пары) может быть только между шаром и плоскостью либо цилиндрической (криволинейной) поверхностью. Для простоты на рисунке изображена именно плоская поверхность. У такой пары есть только одна связь в точке. Поэтому шар обладает максимальным количеством степеней свободы. Его положение задается с помощью всех трех углов поворота αзв2, βзв2, γзв2 и двух координатXзв2, Yзв2. |
Данные о кинематических парах, приведенные в указанной таблице, помогут вам более грамотно конструировать подвижные соединения деталей. Как именно — станет отчасти понятно уже в следующем параграфе.
Написать отзыв
Ваш отзыв: Внимание: HTML не поддерживается! Используйте обычный текст.
Читайте также: