Сообщение на тему виды роботов
Обновлено: 08.07.2024
Робототехника — широкое понятие, в котором есть разные направления. В них можно запутаться. В этой статье Промобот разбирает, какие из умных устройств можно назвать роботами, на какие виды они делятся и чем отличаются друг от друга.
Что вообще такое робот
То есть роботом можно назвать любое устройство или механизм, который выполняет предназначенные ему действия и одновременно отвечает трём условиям:
- SENSE: воспринимает окружающий мир с помощью сенсоров. Такими сенсорами могут быть микрофоны, камеры (всех областей электромагнитного спектра), различные электромеханические сенсоры, датчики и прочее.
- THINK: понимает окружающий мир и строит модель поведения, чтобы выполнять предназначенные ему задачи.
- ACT: воздействует на физический мир.
Если хотя бы одно из условий не выполняется, то такое устройство нельзя назвать роботом. Например:
- Беспилотный автомобиль — робот.
- Sense: оснащён камерами и лидаром.
- Think: строит модели, понимает окружающий мир и принимает решения.
- Act: перевозит пассажиров или груз.
- Sense: панель с кнопками или сенсорный дисплей.
- Think: – .
- Act: выдаёт кофе.
Каких видов бывают роботы
Существует принятое деление робототехники на типы в зависимости от общей прикладной области. Для этого используется классификация, предложенная в упомянутом выше стандарте ISO 8373:2012:
- Промышленные роботы . Призваны выполнять задачи по автоматизации производства. Обычно это всевозможные манипуляторы. Например, в Новосибирске учёные разработали робота, который умеет сортировать бытовые отходы.
- Сервисные роботы. Призваны заменить или дополнить человека в решении типовых и рутинных задач в сфере обслуживания. Например, компания OrionStar выпустила робота-баристу Robotic Coffee Master, который умеет варить кофе на уровне мастера
Грубо говоря, промышленные роботы находятся в производственном цеху, а сервисные роботы — за его пределами.
Типы сервисных роботов
В соответствии с классификацией Международной федерацией робототехники (International Federation of Robotics — IFR) сервисная робототехника делится на два типа:
- Персональные. Используются в нашей повседневной жизни:
- Роботы-пылесосы.
- Кухонные роботы.
- Роботы-сиделки .
- Роботы-питомцы.
- Секс-роботы.
- Профессиональные. Используются для извлечения выгоды при оказании различных услуг:
- Роботы-консультанты.
- Роботы-гиды.
- Роботы-администраторы.
- Роботы-курьеры.
- Роботы-диагносты .
Если для разных персональных задач требуются разные модели роботов, то под несколько профессиональных задач можно запрограммировать одну и ту же модель. Например, Promobot V.4 работает в МФЦ Челябинска , полицейским в Дубае , экскурсоводом в Москве и ещё во многих местах под разными должностями. На робота можно устанавливать разные дополнительные устройства: принтер, сканер для документов, банковский терминал и другие. Это помогает ему работать в разных сферах.
Удивительный мир робототехники и его многообещающее будущее
![Робот]()
Робототехника - это отрасль науки и техники, которая занимается проектированием, конструированием и эксплуатацией роботов, а также компьютерных систем для их управления, сенсорной обратной связи и обработки информации.
Хотя первые роботы были придуманы много лет назад, реальный потенциал полностью автономной робототехники был реализован во второй половине XX века.
Вы также можете прочитать: История робототехники
Применение робототехники
Основная цель робототехники заключалась в том, чтобы просто выполнять набор сложных задач, в основном на промышленных предприятиях, но теперь она распространилась на множество областей.
Сегодня мы можем выделить следующие сферы применения робототехники:
- Военные роботы: Само собой разумеется, что военные операции сопряжены с высоким уровнем риска и, следовательно, имеет смысл использовать машины для спасения человеческих жизней. Существует множество разновидностей военных роботов, а именно БПЛА (беспилотные летательные аппараты, также известные как дроны), UGV (беспилотные наземные транспортные средства) и UUV (беспилотные подводные аппараты). Они используются для обнаружения террористов и проведения атак. Есть даже четвероногие роботы для переноски тяжелого оружия и боеприпасов.
![Четвероногий военный робот]()
- Образование: многие школы и институты используют роботов для обучения и вовлечения студентов в программы STEM (наука, технология, инженерия и математика). Студентам доступно множество наборов, с помощью которых они могут многое узнать о робототехнике. Не только это, но и детям с аутизмом и другими поведенческими расстройствами также удобнее взаимодействовать с роботами и получать знания по различным предметам.
- Здравоохранение: Разрабатываются различные виды роботов, которые будут использоваться в больницах, чтобы помочь врачам и медсестрам в уходе за пациентами. Есть роботы, которые могут продезинфицировать место, позаботиться о потребностях пациентов и даже удалить нежелательные элементы из тела без хирургического вмешательства. Существует также робот по имени да Винчи, который помогает с точностью выполнять операции, которые сложно выполнить вручную.
- Сельское хозяйство: на сельскохозяйственных полях используются малогабаритные роботы, оснащенные камерой и датчиками. Они перемещаются по полям и обнаруживают сорняки и другие виды инфекций. Датчики помогают наносить химические средства только на пораженные участки, тем самым защищая окружающую среду от выброса вредных химикатов в воздух.
![Роботы в сельском хозяйстве]()
- Производство: Очевидно, промышленные роботы широко используются на промышленных предприятиях. Такие факторы, как отрицательный прирост населения в некоторых странах, незаинтересованность молодых работников заниматься заводской работой и экономия времени при использовании роботизированного оборудования, определяют подъем интереса к промышленным роботам. Самая распространенная иллюстрация, которую можно здесь привести, - это автомобильные заводы, которые вместе с рабочими производят автомобили.
![Роботы производят автомобили]()
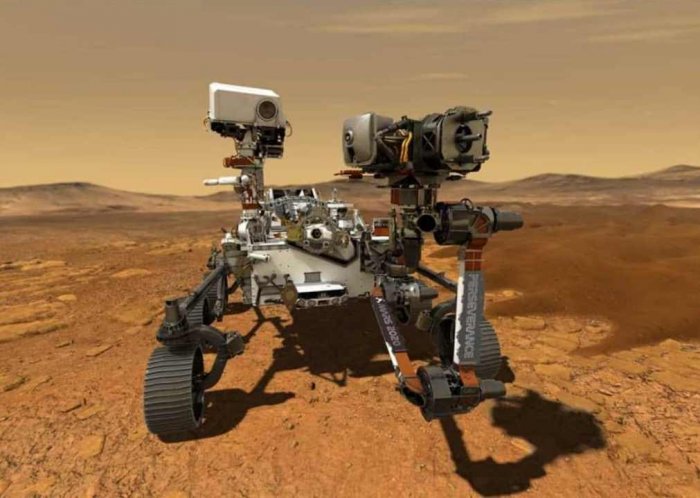
- Космос: несколько стран построили собственных космических роботов различных форм и размеров, чтобы исследовать космос. Некоторые из них не могут даже контролировать свой собственный вес на Земле, но эффективно работают в космосе с отличной ловкостью.
![Марсоход в космосе]()
Применение промышленных роботов:
Виды роботов
От тяжелых, металлических и проводных машин, известных как супер роботы, до крошечных автономных устройств, известных как наноботы, область робототехники была исследована в значительной степени. Ниже перечислены наиболее интересные виды роботов, которые были разработаны в последнее время.
Давайте посмотрим список некоторых интересных форм роботов:
Экзоскелеты: это технология, в которой электронный костюм для тела предлагает пользователю движение конечностей и увеличивает силу.
В первую очередь они используются в военных целях для подъема тяжелых грузов и для пациентов с травмами позвоночника.
Пример: Ekso Bionics разработала эксо-костюмы для всего тела, которые могут носить люди, пострадавшие от инсульта или травмы спинного мозга, чтобы снова встать на ноги.
Первоначально разработанные для солдат, эти костюмы также используются в различных реабилитационных клиниках для пациентов со слабостью нижних конечностей.
![Экзоскелет для промышленности]()
Гуманоидные роботы: это роботы с телом, напоминающим человеческое, с головой, двумя руками, туловищем и двумя ногами.
Подкатегория гуманоидов известна как андроиды, которые внешне очень похожи на человека с точки зрения эстетики и могут имитировать человеческое поведение.
Пример: Атлас - один из самых продвинутых роботов-гуманоидов, разработанный компанией Boston Dynamics, принадлежащей Google.
Хотя это не андроид с человеческими кожей и выражениями лица, но он может делать много интересного. Он может ходить по снегу и восстанавливать равновесие, как и мы, открывать двери, поднимать ящики и даже ощущать предметы, лежащие перед ним.
![Atlas Boston Dynamics]()
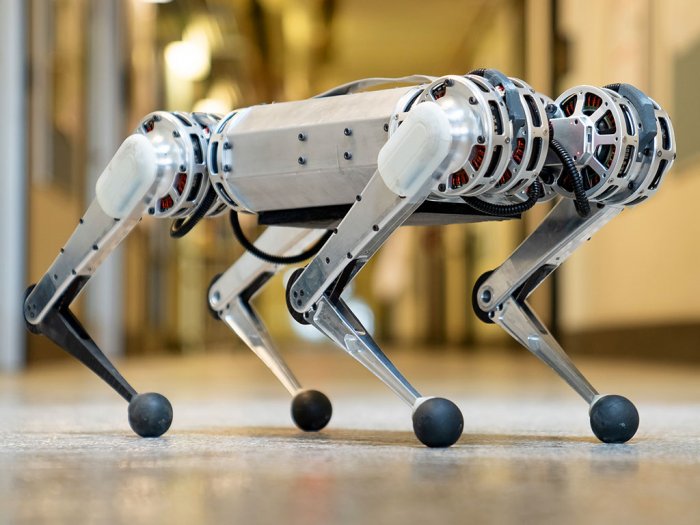
Роботы-животные: робототехника, вдохновленная биологией, - это довольно новая категория робототехники, в которой естественные биологические характеристики живых существ воспроизводятся в виде моделей роботов, вдохновленных животными.
Наблюдаются такие черты животных, как то, как они прыгают, карабкаются, ходят или ползут, а затем предпринимаются попытки воспроизвести их в настройке машины.
Пример: существует робот по имени Cheetah, разработанный Boston Dynamics, который может скакать со скоростью более 45 км в час.
В Массачусетском технологическом институте разработан аналогичный робот с таким же названием, который может обнаруживать препятствия и перепрыгивать через них при беге со скоростью 20 км в час.
![Робот-гепард]()
Роботы-спасатели. Одним из наиболее логичных и разумных способов использования роботов является их развертывание в ситуациях, связанных с ликвидацией последствий стихийных бедствий при проведении спасательных операций. Требуется много мужества, а также усилия, чтобы найти и спасти жертв во время человеческой или техногенной катастрофы.
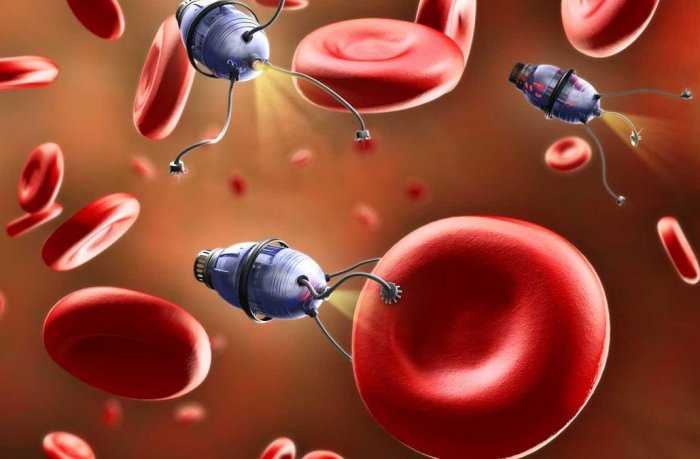
Наноботы: эти крошечные устройства предназначены для выполнения повторяющихся задач с точностью до наноразмеров в несколько нанометров или меньше. Они применяются при сборке и обслуживании сложных систем или для создания устройств, машин и схем на атомарном или молекулярном уровне. Кроме того, в сфере здравоохранения наноботов используют для доставки лекарств, уничтожения раковых клеток и т. д.
Пример: группа физиков из Университета Майнца в Германии сконструировала самый маленький в мире двигатель из одного атома. Он преобразует тепловую энергию в движение в самом маленьком масштабе, который мы когда-либо видели.
![Наноботы]()
Рой: робототехника роя очень похожа на имитацию группы насекомых или муравьев в виде крошечных устройств, которые ползают вместе и формируют определенные конструкции. Их можно использовать в таких областях, как сельское хозяйство, спасательные работы или военные операции.
Пример: Гарвардский университет разработал рой из 1024 крошечных роботов, которые могли создавать определенные образования, такие как алфавиты, пятиконечные звезды и другие сложные конструкции, без какого-либо центрального интеллекта.
![Рой роботов]()
Сегодня существует множество роботов различных форм, размеров и конструкций, но все они подвержены определенным проблемам.
Например, роботы, участвующие в специальных конкурсах робототехники, эффективно выполняли задачи, подобные людям, но у них не было надлежащей системы для восприятия окружающей среды, и они просто следовали инструкциям оператора.
Кроме того, существуют мини-роботы, такие как Darwin, разработанные ROBOTIS, которые довольно хорошо умеют ходить, играть в футбол и даже вставать после падения, но их нельзя использовать в приложениях, требующих физической силы. Также есть робот по имени Cozmo от Anki, который даже может выражать чувства и играть, но это просто робот для развлечения.
Задачи, возложенные на роботов, включают в себя вождение автомобиля, прогулку по неровной дороге, расчистку мусора, поворот клапанов, подключение шлангов, открытие дверей, просверливание дыры, подъем по лестнице. Хотя это легко для людей, то же самое для роботов чрезвычайно сложно.
Чтобы робот сделал всего один шаг, требуются сотни и тысячи строк кода. Кроме того, люди начали ходить после нескольких лет эволюции, и даже сейчас, когда рождается ребенок, требуется больше года, чтобы научиться ходить в совершенстве. Итак, существует еще много технических проблем и препятствий, которые необходимо преодолеть ученым и инженерам.
Многие люди считают, что активная разработка и массовое внедрение роботов отнимут у людей множество рабочих мест. Однако Шерри Теркл, профессор Массачусетского технологического института, говорит, что роботы - это не заменители, а спутники людей, и их развитие скорее приведет к созданию дополнительных рабочих мест.
Еще одна проблема заключается в том, что нам нужно установить ограничение на характер задач, которые назначаются роботам. Логично использовать их в местах, которые слишком опасны для людей. Несомненно, технология всегда предлагала множество преимуществ и играет важную роль в нашей жизни, но не менее важно также определить пределы ее использования.
Существует огромное количество различных типов роботов, предназначенных для разных целей и отличающихся друг от друга не только целями и задачами, но и самими принципами их архитектуры.
Однако можно условно разделить всех роботов на следующие типы:Промышленные роботы
![Промышленный робот]()
Данный тип роботов находит свое применение, главным образом, на промышленных производствах и в научных лабораториях.Манипулятор промышленного робота в зависимости от его задач имеет от двух до шести степеней свободы и может перемещать грузы весом до нескольких центнеров в радиусе нескольких метров.
Чаще всего промышленные роботы используются для перемещения и сортировки различной продукции (в том числе крупногабаритных грузов), в качестве сварщиков и для покраски.Использование данного типа роботов удобно для многих отраслей промышленного производства, поскольку позволяет добиться роста производительности труда при сохранении высокого качества продукции и дает возможность быстро приспосабливаться к изменениям объектов производства и потребительского рынка. Именно поэтому с каждым годом растет число предприятий, производственные линии которых укомплектованы роботами.
Военные роботы: боевые и роботы для обеспечения безопасности
![Военный робот]()
Предназначены как для военных операций (в качестве основной действующей силы), так и для помощи военнослужащим: это и роботы для переноски тяжестей (американский проект BigDog как раз и разрабатывался с надеждой на то, что робот сможет переносить снаряжение и помогать солдатам на территории, где не способен передвигаться обычный транспорт), и роботы-саперы, и активно разрабатываемые сейчас экзоскилеты.Бытовые роботы
![Бытовой робот]()
Предназначены для помощи человеку в повседневной жизни. Сейчас бытовые роботы не слишком распространены, однако есть все основания предполагать широкое их распространение в ближайшем будущем.На данном этапе бытовые роботы – чаще всего предназначены для развлекательных целей, но всё большую популярность набирают роботы-уборщики, по своей сути - автоматические пылесосы, способные самостоятельно прибраться в квартире и вернуться на место для подзарядки без участия человека.
К этому типу можно отнести и роботов, которые способны заменять человека при выполнении некоторой работы: роботы-повора, манекенщики, мед сестры и санитары и тому подобное.
Андроиды
![Андроидный робот HRP-4C]()
Андроид – это человекоподобный робот. Именно этот тип роботов наиболее широко распространен в научной фантастике и кинематографе.Андроиды несколько выбиваются из нашей общей классификации, поскольку могут выполнять функции как бытовых, так и военных и промышленных роботов. Но, все-таки, мы считаем что их стоит вынести в отдельный вид.
![]()
Промышленных роботов можно разделить на 6 основных типов.
Сегодня промышленные роботы используются не только в автомобильной промышленности, но и при сборке электроники, и в пищевом производстве. Роботы успешно используются для решения многих задач: сварка, покраска, сборка, паллетирование. Для того, чтобы наилучшим способом адаптироваться к каждому типу задачи — промышленные роботы бывают различных типов, различных конструкций и с разными функциями.
Несмотря на большое разнообразие, решаемых роботом, задач, и вариаций конструкции, выделяют 6 основных типов роботов.
Разница заключается в типе соединения и механической конструкции.
Существуют различные способы структуризации промышленных роботов: по размеру, нагрузке, сфере применения. В этой статье мы остановимся на структуризации по типу соединения звеньев робота и механической конструкции.
Оси робота как суставы человека
У роботов могут быть и вращательные и линейные оси. Количество соединений в роботе является количеством осей или степеней свободы (DOF). Количество и типы соединений звеньев робота будет для нас основным фактором, позволяющим нам определить тип робота.
![]()
Можно найти много схожего в строении суставов робота и человека. Чаще всего двигатели вращают суставы робота, подобно как мышцы вращают запястье человек или сгибают руку в локте. Но есть и то, что у человека нет – это линейные соединения звеньев робота, позволяющие выдвигать вперёд/назад или верх/вниз сустав робота.
У каждого промышленного робота есть инструмент, который, как правило, крепится на запястье – это может быть сварочная горелка или захват. Для перемещения инструмента требуется как минимум три сустава, чтобы двигаться по трем осям координат. Для ориентирования сустава с инструментом, потребуется ещё 3 оси.
Теперь вы знаете основы, перейдем к основным типам роботов.
Сферический робот, с полярной системой координат. (POLAR COORDINATE ROBOT)
Первый промышленный робот
![]()
![]()
Kawasaki-Unimate 2000 выпущенный в 1969 году
Этот робот имеет центральный поворотный вал как у башни танка и удлиняющуюся руку с вращающимся запястьем. Рука, способная удлиняться предназначена для достижения большого радиуса действия. Такой тип роботов широко использовался на заре промышленной робототехники. Робот Kawasaki-Unimate 2000, как раз этого типа.
Ниже редкое видео демонстрирующее работу первого японского промышленного робота Kawasaki-Unimate 2000
Цилиндрический робот (CYLINDRICAL COORDINATE ROBOT)
Робот с 50-летней историей.
![]()
![Робот TL420 для работы с жидкокристаллической стеклянной подложкой.]()
На фото робот Kawasaki TL420
для работы с жидкокристаллической стеклянной подложкой.Этот робот похож на робота с полярной системой координат — у него также есть выдвигающаяся рука и поворотный вал. Но разница заключается в движении руки робота, которая может двигаться по вертикали, скользящим линейным, а не вращающимся движением. Сегодня роботы этого типа по-прежнему используются, например, для переноса LCD панелей для мониторов.
Линейный робот (Декартов робот) (Cartesian robot) .
Простой в управлении.
![]()
![]()
Робот, работающий в прямоугольной системе координат. Движения этого робота похожи на игровой автомат, в котором нужно достать игрушку. Все звенья робота двигаются по трём перпендикулярным осям и не вращаются. Как правило, такой робот имеет большие габариты, но высокую точность и простоту в управлении. Этот тип роботов чаще применяется для перемещения тяжелых инструментов, а в качестве инструмента можно использовать даже целого робота.
На видео, пример конструкции с линейными осями с подвешенным шарнирным роботом Kawasaki
Шарнирный робот (ARTICULATED ROBOT)
Высокая гибкость движений
![]()
![]()
На фото универсальный робот Kawasaki CX210L
с грузоподъемностью 210 кгСегодня это самый распространенный промышленный робот. Конструкция представляет собой последовательно соединённые звенья. Каждое следующее звено крепится к концу другого. 6-ти осевой шарнирный робот имеет такую же подвижность, как и человеческая рука. Но считается, что программирование таких роботов гораздо сложнее. Однако, благодаря современным контроллерам Kawasaki, процесс создания управляющей программы чрезвычайно прост. Этот тип роботов используется для очень широкого круга задач, таких как палетирование, обслуживание станков, дуговая или точечная сварка и многое другое.
SCARA робот (SELECTIVE COMPLIANCE ASSEMBLY ROBOT ARM)
![]()
![]()
Этот робот отличается тем, что все основные звенья перемещаются только в горизонтальной плоскости. И только инструмент на конце руки двигается в линейном направлении. За счёт высокой жесткости в вертикальном направлении роботы SCARA достигают высокой точности и скорости с двигателями меньшей мощности. Роботы с такой конструкцией наиболее востребованы в операциях по сборке. К примеру, SCARA робот duAro успешно применяется на заводах по сборке печатных плат и размещению полупроводниковых пластин.
На видео ниже представлена работа двухрукого робота DuAro. Робот собирает печатные платы.
Параллельный робот (Дельта робот, робот-паук)
Когда скорость важна
![]()
![]()
На фото высокоскоростной робот Kawasaki YF003N
Ключевым отличием таких роботов является конструкция из нескольких звеньев, прикрепленных к общему основанию, позволяющий сохранять пространственную ориентацию инструмента робота. Чаще всего дельта робот состоит из трёх таких рычагов. Все три рычага одновременно поддерживают захват робота на одинаковой высоте. Обладают высокой скоростью и применяются для операций сортировки или укладки цельной продукции в короба, и, как правило, устанавливается над конвейером.
На видео показано как робот YF03N сортирует листки базилика по размеру.
Заключение
Все вышеперечисленные роботы являются промышленными, но каждый отличается своими характеристиками: грузоподъёмностью, диапазоном рабочей зоны, точностью, скоростью, габаритами. В зависимости от типа соединения звеньев и конструкции каждый робот находит своё оптимальное применение, свою задачу с которой справляется лучше других.
При автоматизации вашего конкретного процесса важно понимать различные доступные варианты решения задачи, чтобы вы могли выбрать лучший тип промышленного робота под вашу задачу.
![Онлайн-магистратура по робототехнике]()
Робототехника — широкое понятие, в котором есть разные направления. В них можно запутаться. В этой статье Промобот разбирает, какие из умных устройств можно назвать роботами, на какие виды они делятся и чем отличаются друг от друга.
Что вообще такое робот
То есть роботом можно назвать любое устройство или механизм, который выполняет предназначенные ему действия и одновременно отвечает трём условиям:
- SENSE: воспринимает окружающий мир с помощью сенсоров. Такими сенсорами могут быть микрофоны, камеры (всех областей электромагнитного спектра), различные электромеханические сенсоры, датчики и прочее.
- THINK: понимает окружающий мир и строит модель поведения, чтобы выполнять предназначенные ему задачи.
- ACT: воздействует на физический мир.
Если хотя бы одно из условий не выполняется, то такое устройство нельзя назвать роботом. Например:
- Беспилотный автомобиль — робот.
- Sense: оснащён камерами и лидаром.
- Think: строит модели, понимает окружающий мир и принимает решения.
- Act: перевозит пассажиров или груз.
- Sense: панель с кнопками или сенсорный дисплей.
- Think: – .
- Act: выдаёт кофе.
Каких видов бывают роботы
Существует принятое деление робототехники на типы в зависимости от общей прикладной области. Для этого используется классификация, предложенная в упомянутом выше стандарте ISO 8373:2012:
- Промышленные роботы. Призваны выполнять задачи по автоматизации производства. Обычно это всевозможные манипуляторы. Например, в Новосибирске учёные разработали робота, который умеет сортировать бытовые отходы.
- Сервисные роботы. Призваны заменить или дополнить человека в решении типовых и рутинных задач в сфере обслуживания. Например, компания OrionStar выпустила робота-баристу Robotic Coffee Master, который умеет варить кофе на уровне мастера
Грубо говоря, промышленные роботы находятся в производственном цеху, а сервисные роботы — за его пределами.
![Робот Фёдор 2]()
Типы сервисных роботов
В соответствии с классификацией Международной федерацией робототехники (International Federation of Robotics — IFR) сервисная робототехника делится на два типа:
- Персональные. Используются в нашей повседневной жизни:
- Роботы-пылесосы.
- Кухонные роботы.
- Роботы-сиделки.
- Роботы-питомцы.
- Секс-роботы.
- Профессиональные. Используются для извлечения выгоды при оказании различных услуг:
- Роботы-консультанты.
- Роботы-гиды.
- Роботы-администраторы.
- Роботы-курьеры.
- Роботы-диагносты.
Если для разных персональных задач требуются разные модели роботов, то под несколько профессиональных задач можно запрограммировать одну и ту же модель. Например, Promobot V.4 работает в МФЦ Челябинска, полицейским в Дубае, экскурсоводом в Москве и ещё во многих местах под разными должностями. На робота можно устанавливать разные дополнительные устройства: принтер, сканер для документов, банковский терминал и другие. Это помогает ему работать в разных сферах.
Читайте также: