
Тахогенератор постоянного тока реферат
Обновлено: 02.07.2024
Уровень развития материальнойкультуры человеческого общества в первую очередь определяется созданием ииспользованием источников энергии. Применение пара, а в последние 100 летэлектричества, совершило техническую революцию в промышленности и оказалорешающее влияние на развитие социальных отношений. В настоящее время в наиболееразвитых странах на одного человека приходится до 1О кВт всех видов энергии.Это примерно в 100 раз больше, чем мускульная мощность человека, которая еще200 лет назад была основной в промышленности и сельском хозяйстве. С полнымоснованием можно считать, что сегодня технический и культурный уровень развитияГосударства определяется количеством электроэнергии, вырабатываемой на душунаселения.
Основой для создания электрических машин и трансформаторов явилсяоткрытый М. Фарадеем закон электромагнитной индукции. Начало практическогоприменения электрических машин было положено русским академиком Б. С. Якоби,который в 1834 г .создал конструкцию электрической машины, явившуюся прототипом современногоэлектродвигателя. Практическое применение трансформаторов началось в 1876 г ., когда русскийученый П. Н. Яблочков впервые применил трансформаторы для питания изобретенныхим электрических свечей. Широкому применению электрических машин впромышленности способствовало изобретение русского инженера М. О.Доливо-Добровольского (1889) трехфазного асинхронного двигателя, отличающегосяпростотой конструкции и высокой надежностью. К началу ХХ в. были созданы почтивсе виды современных электрических машин и разработаны основы их теории.Начиная с этого времени быстрыми темпами происходит электрификацияпромышленности и транспорта.
Электрические машины малой мощности(микромашины), применяются в системах и устройствах автоматики и вычислительнойтехники в качестве функциональных элементов. Все электромашинные элементыавтоматики разделяются на три группы: исполнительные двигатели, электромашинныеусилители и информационные машины. Исполнительные двигатели осуществляютпреобразование электрического сигнала в механическое перемещение, они могутбыть асинхронными, постоянного тока и шаговыми. Электромашинные усилителислужат для усиления мощности электрических сигналов. Информационные машинывключают в себя тахогенераторы, сельсины, магнесины и вращающиесятрансформаторы. Эти машины служат для преобразования механических величин (углаповорота, частоты вращения или ускорения) в электрический сигнал или для передачи механического перемещения нарасстояние.
Тахогенераторпостоянного тока — это машина постоянного тока с независимым возбуждениемили возбуждением постоянными магнитами, работающая в генераторном режиме. Поконструкции он почти не отличается от машин постоянного тока.
Тахогенераторыпостоянного тока служат для измерения частоты вращения по значению выходногонапряжения, а также для получения электрических сигналов, пропорциональныхчастоте вращения вала в схемах автоматического регулирования.
Основными требованиями, предъявляемыми ктахогенераторам, являются: а) линейность выходной характеристики; б) большаякрутизна выходной характеристики; в) малое влияние на выходную характеристикуизменения температуры окружающей среды и нагрузки; г) минимум пульсацийнапряжения на коллекторе.
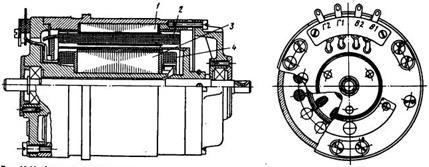
На. рис. 9.5 показаны принципиальные схемы тахогенераторовпостоянного тока с электромагнитным возбуждением (а) и возбуждением постояннымимагнитами (б).
В случае электромагнитного возбуждения обмотку возбужденияОВ подключают к источнику постоянного тока (рис. 9.5, а). Тахогенераторвозбуждается и если его
якорь привести во вращение с частотой n, то на выходегенератора появится постоянное напряжение Uвых. Уравнение выходнойхарактеристики тахогенератора имеет вид

где rа- сопротивление обмотки якоря, Ом; Rн — внутреннее сопротивление прибора, подключенного к тахогенератору, Ом.

Если пренебречь падением напряжения в щеточном контакте∆Uщ, то

Из (2) следует, что чем больше сопротивление прибора Rн тем больше крутизна выходной характеристики Сu. Наибольшая крутизна увыходной характеристики, соответствующей режиму холостого хода тахогенератора,когда обмотка якоря разомкнута" (RH =∞).
С ростом тока нагрузки (уменьшением RH) крутизна выходной характеристики уменьшается (рис. 9.6, а). Усовременных тахогенераторов постоянного тока Сu = (6÷
260).10¯³В/(об/мин), что превышает крутизну асинхронныхтахогенераторов.
Выходная характеристика тахогенератора постоянного тока — прямая линия. Однако опыт показывает, что выходная характеристика прямолинейна
только в начальной части (при малых относительных частотахвращения), а с ростом частоты вращения она становится криволинейной (рис. 9.6,а). Криволинейность
характеристики усиливается при уменьшении сопротивлениянагрузки RH и увеличении частоты вращенияn. Это объясняется размагничивающим действием реакции
якоря в тахогенераторе. Для уменьшения криволинейностивыходной характеристики не следует использовать тахогенератор на его предельныхчастотах вращения и применять в качестве нагрузки приборы с малым внутреннимсопротивлением.
В реальныхусловиях существует падение напряжения в щеточном контакте ∆Uщ, поэтому выходная характеристикатахогенератора выходит не из начала осей координат, а из точки на оси ординат,отстоящей от начала координат на
Uщ= -[∆Uщ/(1 + rа/ RH)] (3)
Это приводит к появлению у тахогенераторов постоянного токазоны нечувствительности ε=±nmin, Впределах которой он не создает на выходе напряжения (рис. 9.6, 6).
Для уменьшения зоны нечувствительности в тахогенераторахприменяют щетки с небольшим значением ∆Uщ, т. е. с малым сопротивлением(медно-графитные или серебряно-графитные). В тахогенераторах высокой точности(прецизионных) используют щетки с серебряными или золотыми напайками.

В тахогенераторахпостоянного тока технологическая неточность установки щеток на геометрическойнейтрали вызывает еще один вид погрешности-ассимметрию выходного напряжения,Она заключается в том, что величина выходного напряжения различна при вращенииякоря с одинаковой частотой, но в противоположных направлениях. При сдвигещеток с геометрической нейтрали возникает продольная составляющая потока якоря,которая при одном направлении вращения совпадает с потоком возбуждения, а придругом-противоположна ему. Следовательно, результирующий поток машины при обоихнаправлениях вращения будет различным, при этом различными будут э. д. с.,индуктируемые в якоре.
Асимметриювыходного напряжения вычисляют как отношение разности выходных напряжений привращении якоря с номинальной частотой в обоих направлениях к полусумме этихнапряжений. В зависимости от класса точности тахогенератора скоростнаяамплитудная погрешность при номинальной частоте вращения составляет ±(0,05-3)%, а ошибка асимметрии равна ±(1-3)%.
Источником погрешности является также непостоянствомагнитного потока обмотки возбуждения Фв. При электромагнитном возбуждениитахогенератора причиной
этого может быть колебание напряжения UВ,подводимого к обмотке возбуждения, нагрев этой обмотки.
В замкнутой системе регулирования тахогенераторы являютсяосновным звеном контура обратной связи по частоте вращения. Часто считают, что тахогенератор — этобезынерционное звено или (при наличии RС-фильтра для сглаживания пульсацийповышенной частоты) инерционное звенопервого порядка с небольшой постоянной времени, определяемой RС-цепочкой фильтра.
Более глубокие исследования, однако, показывают, что с учетом ∆UЩ и люфтов в подвижной передаче (муфты, зубчатыепары) узел тахогенератора становится нелинейным звеном, вызывающимавтоколебания системы управления. При этом наиболее вредные низкочастотныепульсации напряжения на выходе узла тахогенератора в большей степени зависят оторганических недостатков применяемых передач, чем от собственно тахогенераторакак электрической машины.
В системе автоматического управления под тахогенератором(ТГ) принято понимать комплекс устройств или узел между валом двигателя ивходом усилителя. В приводах с тахогенераторами этот узел включает в себяустройство сочленения (муфту, зубчатую передачу), собственно тахогенератор,проводку до панели управления, а иногда также выходной трансформатор, фильтр ипотенциометр.
На рис.9.8 вкачестве примера приведена простейшая структурная схема управляемого электропривода с обратнойсвязью по частоте вращения. Схема управления предназначена для того, чтобыобеспечить частоту вращения механизма М пропорциональнойнеизменному эталонному напряжению или изменять ее пропорционально напряжениюпрограммного устройства ПУ. Для этогонапряжение ТГ в устройстве сравненияУС сопоставляется с напряжением источника эталонного напряжения илипрограммного устройства и их разность подается на усилитель, где онаусиливается, как правило, двумя последовательными каскадами — предварительнымусилителем У и усилителем мощности УМ, к которомуподключен двигатель Д. Нетруднозаметить, что чем выше коэффициент усиления по напряжению и по мощности усилителей,тем меньшими должны быть разность напряжений и мощность, отдаваемая ТГ, которые необходимо подавать на входУ, чтобы обеспечить заданную частоту вращения, и тем точнее будет
выдерживаться пропорциональностьюмежду частотой вращения и напряжением ПУ.
Рис.9.8 Структурная схема управляемого
Достоинства и недостатки.Достоинстватахогенераторов постоянного тока по сравнению с асинхронными тахогенераторами:меньшие габаритные размеры и масса (в 2-3 раза) при большей
выходной мощности; отсутствие фазовой погрешности; возможновозбуждение постоянными магнитами, что позволяет обойтись без источника питаниядля цепи
Наряду с этим тахогенераторы постоянного тока имеютнедостатки, ограничивающие их применение: сложность конструкции, высокуюстоимость, наличие скользящего контакта между щетками и коллектором, чтоприводит к снижению надежности тахогенератора и к нестабильности выходнойхарактеристики; наличие зоны нечувствительности; пульсация выходного напряжения;помехи радиоприему, для подавления которых в некоторых случаях приходитсяприменять специальные меры.
(Для подавления электромагнитных излучений применяютэкранирование двигателя. В качестве экрана используют заземленный корпусдвигателя. Если в подшипниковом щите со стороны коллектора имеются окна, то ихзакрывают металлической сеткой, соединенной с заземленным корпусом двигателя.Если корпус двигателя или его передний подшипниковый щит(со стороны коллектора)изготовлены из пластмассы, то неметаллическую часть двигателя закрывают сеткойи заземляют.
Для подавлениярадиопомех, проникающих в электросеть, применяют симметрирование обмоток ивключение фильтров. Симметрирование состоит в том, что каждую обмотку,включаемую последовательно в цепь якоря (обмотку возбуждения, обмоткудобавочных полюсов и т. п.), разделяют на две равные части и присоединяютсимметрично обмотке якоря, подключая к щеткам разной полярности. В качествефильтров используют конденсаторы, включенные между каждым токонесущим проводоми заземленным корпусом двигателя. Значение емкости конденсаторов подбираютопытным путем. Конденсаторы должны быть рассчитаны на рабочее напряжениедвигателя. Предпочтительнее применять проходные конденсаторы типа КБП, укоторых один из зажимов металлический корпус, прикрепляемый непосредственно кстатору двигателя и заземляемый вместе с ним. Часто конденсаторы фильтрарасполагают в коробке выводов двигателя.)
Таким образом, любой вид тахогенератора имеет своидостоинства и недостатки. Поэтому при выборе тахогенератора необходимо исходитьиз конкретных условий его работы и требований, предъявляемых к тахогенераторусо стороны автоматического устройства, для которого он предназначается.
Широкое применениеполучили тахогенераторы постоянного тока, возбуждаемые постоянными магнитами. Эти тахогенераторы не имеютобмотки возбуждения, и поэтому они проще по конструкции и имеют меньшиегабариты.
В табл. 9.2 приведены технические данные некоторых тахогенераторовпостоянного тока, изготавливаемых серийно отечественной промышленностью.

И.П. Копылов “Электрические машины” 2004г.
Д.Э. Брускин, А.Е. Зорохович, В.С. Хвостов “Электрическиемашины” 1979г.
М. М. Кацман “Электрические машины”2000г.
М. М. Кацман “Электрическиемашины и электропривод автоматических устройств” 1987г.
Тахогенераторы - виды, устройство и принцип работы
Таким параметром может выступать величина генерируемой ЭДС или значение частоты сигнала. Выходной сигнал с тахогенератора может подаваться на средство визуального отображения (например на дисплей) или на устройство автоматического управления частотой вращения вала, на котором работает данный тахогенератор.
Тахогенераторы бывают нескольких типов, в зависимости от вида сигнала, генерируемого на выходе: с сигналом переменного напряжения или тока (асинхронные или синхронные тахогенераторы), либо с сигналом постоянного тока.

Тахогенератор постоянного тока
Тахогенератор постоянного тока представляет собой коллекторную машину с возбуждением либо от постоянных магнитов (встречаются чаще), либо от обмотки возбуждения (встречаются реже), располагаемых на ее статоре. Измерительная ЭДС наводится на обмотку ротора тахогенератора, и оказывается прямо пропорциональна угловой скорости вращения ротора, по сути — скорости изменения магнитного потока, в точном соответствии с законом электромагнитной индукции.
Выходной сигнал — напряжение, величина которого также прямо пропорциональна угловой скорости вращения ротора — снимается через щетки с коллектора. Поскольку в работе участвуют коллектор и щетки, такой агрегат подвержен более скорому износу, чем тахогенератор переменного тока. Проблема еще и в том, что щеточно-коллекторный узел в процессе своей работы порождает импульсные помехи в выходном сигнале такого тахогенератора.

Так или иначе, выходным сигналом у тахогенератора постоянного тока является напряжение, что создает трудности с точным преобразованием напряжение-скорость, ведь магнитный поток подмагничивания зависит от температуры магнитов, от электрического сопротивления в месте контакта щеток с коллектором (которое со временем изменяется), наконец - от размагничивания постоянных магнитов с течением времени.
Тем не менее, в некоторых случаях тахогенераторы постоянного тока оказываются удобны формой представления выходного сигнала, а также закономерным явлением смены полярности данного сигнала в соответствии с изменением направления вращения вала.
Электродвигатель со встроенным тахогенератором:
Асинхронный тахогенератор переменного тока
Асинхронные тахогенераторы переменного тока похожи по устройству на асинхронные двигатели с короткозамкнутым ротором. Ротор здесь изготавливается в виде полого цилиндра (обычно медного или алюминиевого), а статор содержит две обмотки, расположенные под прямым углом друг к другу. Одна из обмоток статора — обмотка возбуждения, вторая — выходная. На обмотку возбуждения подается переменный ток с определенной амплитудой и частотой, а выходная обмотка присоединяется к измерительному прибору.

Когда короткозамкнутый ротор вращается, он периодически нарушает изначальную ортогональность магнитных потоков двух обмоток, в результате искажения картины магнитных полей, в выходной обмотке периодически наводится ЭДС. Если же ротор неподвижен, то магнитный поток обмотки возбуждения не искажается, и в выходной обмотке ЭДС не наводится. Здесь величина генерируемой ЭДС пропорциональна частоте вращения вала.
Поскольку подаваемый на обмотку возбуждения ток имеет собственную частоту, отличную от частоты вращения вала, такой тахогенератор именуется асинхронным. Кроме прочего, данная конструкция позволяет по фазе выходного сигнала судить о направлении вращения ротора, - при смене направления вращения фаза переворачивается.
Синхронный тахогенератор переменного тока
Синхронные тахогенераторы представляют собой бесколлекторные машины переменного тока. Намагниченность ротора создается постоянным магнитом, на статоре же присутствуют одна или более обмоток. В данном случае и амплитуда выходного сигнала, и его частота, - будут пропорциональны частоте вращения вала. Поэтому данные о скорости можно измерять как по значению амплитуды (детектирование по амплитуде), так и непосредственно по частоте (детектирование по частоте). Однако направление вращения по выходному сигналу синхронного тахогенератора не определить.
Ротор синхронного тахогенератора переменного тока может быть выполнен в виде многополюсного магнита, и на один оборот вала давать в выходном сигнале несколько импульсов подряд. Такие тахогенераторы, наравне с асинхронными, отличаются более длительным сроком службы, поскольку в них нет щеточно-коллекторного узла, склонного к механическому износу.
Детектирование по частоте
Поскольку у синхронного тахогенератора частота на выходе от температуры и других факторов не зависит, то измерения частоты с ним получаются более точными. Вычисление осуществляется очень просто, достаточно знать количество пар полюсов p на роторе:
Но есть и нюанс. Чтобы точность вычислений получилось достаточно высокой, необходимо затратить время, за которое теоретически скорость может уже измениться, а это значит, что пока импульсы считаются, нарастает погрешность измерения, что вредно.
Дабы погрешность при измерении снизить, ротор делают многополюсным, чтобы вычисления можно было осуществить быстрее, тогда и реакция регулирующей системы может последовать более скоро. Для одного полюса частота вычисляется по следующей формуле:
где N - количество считанных импульсов, Т - период считывания импульсов
У синхронного тахогенератора амплитуда сигнала изменяется в зависимости от скорости, поэтому при проектировании выходного частотного детектора важно учесть весь возможный диапазон амплитуд выходных напряжений тахогенератора.
Детектирование по амплитуде
При амплитудном способе определения частоты схема частотного детектора будет проще, но здесь важно учесть влияние таких факторов, как: температура, изменение немагнитного зазора и т. д. Чем выше частота — тем больше амплитуда выходного сигнала, поэтому схема детектора обычно представляет собой выпрямитель и НЧ-фильтр, где коэффициент преобразования, измеряемый в мВ*об/мин, позволяет определить частоту по следующей формуле:
Кроме рассмотренных в данной статье традиционных типов тахогенераторов, в современной технике также применяются импульсные датчики на базе оптронов, датчиков Холла и т. д. Достоинство тахогенераторов заключается в том, что в паре с детектором они не требуют никаких дополнительных источников питания. К недостаткам традиционных тахогенераторов машинного типа относятся: плохая чувствительность на низких скоростях и вносимый тормозящий момент.
Оглавление
1. Предисловие………………………………………………………стр.2
2. Принципработы………………………………………………стр.2
3. Тахогенераторыпостоянного тока в схемах автоматики………………………………………….стр.6
4. Достоинства инедостатки…………………………………………… стр.7
5. Списоклитературы…………………………………………… стр.8
Тахогенераторы постоянного тока
Предисловие
Уровень развития материальнойкультуры человеческого общества в первую очередь определяется созданием ииспользованием источников энергии. Применение пара, а в последние 100 летэлектричества, совершило техническую революцию в промышленности и оказалорешающее влияние на развитие социальных отношений. В настоящее время в наиболееразвитых странах на одного человека приходится до 1О кВт всех видов энергии.Это примерно в 100 раз больше, чем мускульная мощность человека, которая еще200 лет назад была основной в промышленности и сельском хозяйстве. С полнымоснованием можно считать, что сегодня технический и культурный уровень развитияГосударства определяется количеством электроэнергии, вырабатываемой на душунаселения.
Основой для создания электрических машин и трансформаторов явилсяоткрытый М. Фарадеем закон электромагнитной индукции. Начало практическогоприменения электрических машин было положено русским академиком Б. С. Якоби,который в 1834 г.создал конструкцию электрической машины, явившуюся прототипом современногоэлектродвигателя. Практическое применение трансформаторов началось в 1876 г., когда русскийученый П. Н. Яблочков впервые применил трансформаторы для питания изобретенныхим электрических свечей. Широкому применению электрических машин впромышленности способствовало изобретение русского инженера М. О.Доливо-Добровольского (1889) трехфазного асинхронного двигателя, отличающегосяпростотой конструкции и высокой надежностью. К началу ХХ в. были созданы почтивсе виды современных электрических машин и разработаны основы их теории.Начиная с этого времени быстрыми темпами происходит электрификацияпромышленности и транспорта.
Электрические машины малой мощности(микромашины), применяются в системах и устройствах автоматики и вычислительнойтехники в качестве функциональных элементов. Все электромашинные элементыавтоматики разделяются на три группы: исполнительные двигатели, электромашинныеусилители и информационные машины. Исполнительные двигатели осуществляютпреобразование электрического сигнала в механическое перемещение, они могутбыть асинхронными, постоянного тока и шаговыми. Электромашинные усилителислужат для усиления мощности электрических сигналов. Информационные машинывключают в себя тахогенераторы, сельсины, магнесины и вращающиесятрансформаторы. Эти машины служат для преобразования механических величин (углаповорота, частоты вращения или ускорения) в электрический сигнал или для передачи механического перемещения нарасстояние.
Принцип работы
Тахогенераторпостоянного тока — это машина постоянного тока с независимым возбуждениемили возбуждением постоянными магнитами, работающая в генераторном режиме. Поконструкции он почти не отличается от машин постоянного тока.
Тахогенераторыпостоянного тока служат для измерения частоты вращения по значению выходногонапряжения, а также для получения электрических сигналов, пропорциональныхчастоте вращения вала в схемах автоматического регулирования.
Основными требованиями, предъявляемыми ктахогенераторам, являются: а) линейность выходной характеристики; б) большаякрутизна выходной характеристики; в) малое влияние на выходную характеристикуизменения температуры окружающей среды и нагрузки; г) минимум пульсацийнапряжения на коллекторе.
На. рис. 9.5 показаны принципиальные схемы тахогенераторовпостоянного тока с электромагнитным возбуждением (а) и возбуждением постояннымимагнитами (б).
В случае электромагнитного возбуждения обмотку возбужденияОВ подключают к источнику постоянного тока (рис. 9.5, а). Тахогенераторвозбуждается и если его
якорь привести во вращение с частотой n, то на выходегенератора появится постоянное напряжение Uвых. Уравнение выходнойхарактеристики тахогенератора имеет вид
где rа- сопротивление обмотки якоря, Ом; Rн — внутреннее сопротивление прибора, подключенного к тахогенератору, Ом.
Если пренебречь падением напряжения в щеточном контакте∆Uщ, то
Из (2) следует, что чем больше сопротивление прибора Rн тем больше крутизна выходной характеристики Сu. Наибольшая крутизна увыходной характеристики, соответствующей режиму холостого хода тахогенератора,когда обмотка якоря разомкнута" (RH =∞).
С ростом тока нагрузки (уменьшением RH) крутизна выходной характеристики уменьшается (рис. 9.6, а). Усовременных тахогенераторов постоянного тока Сu = (6÷
260).10¯³В/(об/мин), что превышает крутизну асинхронныхтахогенераторов.
Выходная характеристика тахогенератора постоянного тока — прямая линия. Однако опыт показывает, что выходная характеристика прямолинейна
только в начальной части (при малых относительных частотахвращения), а с ростом частоты вращения она становится криволинейной (рис. 9.6,а). Криволинейность
характеристики усиливается при уменьшении сопротивлениянагрузки RH и увеличении частоты вращенияn. Это объясняется размагничивающим действием реакции
якоря в тахогенераторе. Для уменьшения криволинейностивыходной характеристики не следует использовать тахогенератор на его предельныхчастотах вращения и применять в качестве нагрузки приборы с малым внутреннимсопротивлением.
В реальныхусловиях существует падение напряжения в щеточном контакте ∆Uщ, поэтому выходная характеристикатахогенератора выходит не из начала осей координат, а из точки на оси ординат,отстоящей от начала координат на
Uщ= -[∆Uщ/(1 + rа/ RH)] (3)
Это приводит к появлению у тахогенераторов постоянного токазоны нечувствительности ε=±nmin, Впределах которой он не создает на выходе напряжения (рис. 9.6, 6).
Для уменьшения зоны нечувствительности в тахогенераторахприменяют щетки с небольшим значением ∆Uщ, т. е. с малым сопротивлением(медно-графитные или серебряно-графитные). В тахогенераторах высокой точности(прецизионных) используют щетки с серебряными или золотыми напайками.
Сильное магнитное насыщение магнитной цепи тахогенератора невсегда целесообразно, потому что увеличивается объем обмотки возбуждения, аследовательно, габаритные размеры тахогенератора. В тахогенераторах с ненасыщенноймагнитной системой для ограничения колебаний потока возбуждения Ф.последовательно в цепь обмотки возбуждения включают терморезистор,компенсирующий изменение сопротивления обмотки при колебаниях температуры, илиприменяют магнитные шунты МШ (рис. 9.7, б),
изготовленные из сплава, изменяющего свое магнитное сопротивлениепри изменении температуры нагрева. Например, при нагреве обмотки возбуждения еесопротивление увеличивается, ток Iв и поток Фв уменьшаются.Но при этом магнитное сопротивление шунтов увеличивается, что уменьшает поток Фшчерез шунты и увеличивает поток Фв. через полюс и якорь на величину, компенсирующуюего уменьшение от изменения тока возбуждения. При снижении температуры процессыидут в обратном направлении. В итоге происходят лишь незначительные колебанияпотока возбуждения.
Все причины,вызывающие отклонение выходной характеристики тахогенератора от прямолинейной,ведут к амплитудной погрешности. Тахогенераторы постоянного
тока имеют амплитудную погрешность от 0,5 до 3%.
В тахогенераторах постоянного тока возможна пульсациявыходного напряжения, обусловленная рядом причин: зубчатой поверхностьюсердечника якоря;
неравномерностью воздушного зазора или неодинаковоймагнитной проводимостью сердечника якоря по разным радиальным направлениям;вибрацией щеток и замыканием
секций обмотки якоря в процессе коммутации; небольшимколичеством секций в обмотке якоря из-за малых габаритных размеров машины Пульсациинапряжения могут вносить помехи в работу автоматических устройств, элементомкоторых являются тахогенераторы. Пульсации напряжения можно ослабить за счет болеекачественной технологии изготовления тахогенеpaтopa с применением веернойсборки листов сердечника якоря (листы укладывают в пакет со сдвигом на однозубцовоеделение), а также подключением сглаживающего фильтра на выход тахогенератора.Однако полностью избавиться от пульсаций не удается. Амплитуды пульсациивыходного напряжения тахогенераторов постоянного тока составляют 0.1-3 % отсреднего значения выходного напряжения.
На работутахогенератора оказывают влияние также пульсации выходного напряжения,обусловленные: 1) зубчатым строением якоря (зубцовые пульсации); 2) изменениеммагнитного потока за время одного оборота вследствие эллиптичности,эксцентриситета якоря или магнитной анизотропии его материала (якорныепульсации); 3) периодическим изменением числа секций в параллельных ветвях якоря;особенно при малом числе коллекторных пластин; 4) вибрацией щеток и замыканиемнакоротко части секций
ТАХОГЕНЕРАТОРЫ постоянного тока В СХЕМАХАВТОМАТИКИ
Применениетахогенераторов постоянного тока в различных системах управления объясняется тем, что входнымсигналом для большинства регуляторов в схемах автоматики является напряжениепостоянного тока; тахометры с равномерными шкалами являются вольтметрами магнитоэлектрическойсистемы и по существу измеряют напряжение постоянного тока, пропорциональноечастоте вращения.
В замкнутой системе регулирования тахогенераторы являютсяосновным звеном контура обратной связи по частоте вращения. Часто считают, что тахогенератор — этобезынерционное звено или (при наличии RС-фильтра для сглаживания пульсацийповышенной частоты) инерционное звенопервого порядка с небольшой постоянной времени, определяемой RС-цепочкой фильтра.
Более глубокие исследования, однако, показывают, что с учетом ∆UЩ и люфтов в подвижной передаче (муфты, зубчатыепары) узел тахогенератора становится нелинейным звеном, вызывающимавтоколебания системы управления. При этом наиболее вредные низкочастотныепульсации напряжения на выходе узла тахогенератора в большей степени зависят оторганических недостатков применяемых передач, чем от собственно тахогенераторакак электрической машины.
В системе автоматического управления под тахогенератором(ТГ) принято понимать комплекс устройств или узел между валом двигателя ивходом усилителя. В приводах с тахогенераторами этот узел включает в себяустройство сочленения (муфту, зубчатую передачу), собственно тахогенератор,проводку до панели управления, а иногда также выходной трансформатор, фильтр ипотенциометр.
На рис.9.8 вкачестве примера приведена простейшая структурная схема управляемого электропривода с обратнойсвязью по частоте вращения. Схема управления предназначена для того, чтобыобеспечить частоту вращения механизма М пропорциональнойнеизменному эталонному напряжению или изменять ее пропорционально напряжениюпрограммного устройства ПУ. Для этогонапряжение ТГ в устройстве сравненияУС сопоставляется с напряжением источника эталонного напряжения илипрограммного устройства и их разность подается на усилитель, где онаусиливается, как правило, двумя последовательными каскадами — предварительнымусилителем У и усилителем мощности УМ, к которомуподключен двигатель Д. Нетруднозаметить, что чем выше коэффициент усиления по напряжению и по мощности усилителей,тем меньшими должны быть разность напряжений и мощность, отдаваемая ТГ, которые необходимо подавать на входУ, чтобы обеспечить заданную частоту вращения, и тем точнее будет
выдерживаться пропорциональностьюмежду частотой вращения и напряжением ПУ.Рис.9.8 Структурная схема управляемого
электропривода
Достоинства и недостатки.Достоинстватахогенераторов постоянного тока по сравнению с асинхронными тахогенераторами:меньшие габаритные размеры и масса (в 2-3 раза) при большей
выходной мощности; отсутствие фазовой погрешности; возможновозбуждение постоянными магнитами, что позволяет обойтись без источника питаниядля цепи
возбуждения.
Наряду с этим тахогенераторы постоянного тока имеютнедостатки, ограничивающие их применение: сложность конструкции, высокуюстоимость, наличие скользящего контакта между щетками и коллектором, чтоприводит к снижению надежности тахогенератора и к нестабильности выходнойхарактеристики; наличие зоны нечувствительности; пульсация выходного напряжения;помехи радиоприему, для подавления которых в некоторых случаях приходитсяприменять специальные меры.
(Для подавления электромагнитных излучений применяютэкранирование двигателя. В качестве экрана используют заземленный корпусдвигателя. Если в подшипниковом щите со стороны коллектора имеются окна, то ихзакрывают металлической сеткой, соединенной с заземленным корпусом двигателя.Если корпус двигателя или его передний подшипниковый щит(со стороны коллектора)изготовлены из пластмассы, то неметаллическую часть двигателя закрывают сеткойи заземляют.
Для подавлениярадиопомех, проникающих в электросеть, применяют симметрирование обмоток ивключение фильтров. Симметрирование состоит в том, что каждую обмотку,включаемую последовательно в цепь якоря (обмотку возбуждения, обмоткудобавочных полюсов и т. п.), разделяют на две равные части и присоединяютсимметрично обмотке якоря, подключая к щеткам разной полярности. В качествефильтров используют конденсаторы, включенные между каждым токонесущим проводоми заземленным корпусом двигателя. Значение емкости конденсаторов подбираютопытным путем. Конденсаторы должны быть рассчитаны на рабочее напряжениедвигателя. Предпочтительнее применять проходные конденсаторы типа КБП, укоторых один из зажимов металлический корпус, прикрепляемый непосредственно кстатору двигателя и заземляемый вместе с ним. Часто конденсаторы фильтрарасполагают в коробке выводов двигателя.)
Таким образом, любой вид тахогенератора имеет своидостоинства и недостатки. Поэтому при выборе тахогенератора необходимо исходитьиз конкретных условий его работы и требований, предъявляемых к тахогенераторусо стороны автоматического устройства, для которого он предназначается.
Широкое применениеполучили тахогенераторы постоянного тока, возбуждаемые постоянными магнитами. Эти тахогенераторы не имеютобмотки возбуждения, и поэтому они проще по конструкции и имеют меньшиегабариты.
В табл. 9.2 приведены технические данные некоторых тахогенераторовпостоянного тока, изготавливаемых серийно отечественной промышленностью.
Список использованнойлитературы:
И.П. Копылов “Электрические машины” 2004г.
Д.Э. Брускин, А.Е. Зорохович, В.С. Хвостов “Электрическиемашины” 1979г.
М. М. Кацман “Электрические машины”2000г.
М. М. Кацман “Электрическиемашины и электропривод автоматических устройств” 1987г.
Д. Э. Брускин “Электрическиемашины и микромашины” 1981г.

Несомненно, развитие человечества в последние столетия неразрывно связано с освоением источников энергии и их эффективным применением. Более того, можно сказать, что уровень развития той или иной страны напрямую зависит от объема производимой энергии.
Первым источником энергии, совершившим промышленную революцию, стал пар, но вскоре его гегемония сменилась на власть электрических машин. Сегодня мы с вами поговорим про тахогенераторы постоянного тока — устройства, внесшие огромную лепту в прогресс человечества.
Немного исторической информации
19 век стал для человечества поворотной точкой в истории. Он знаменателен величайшими научными открытиями, в том числе и в электротехнике.

- В то далекое время известный английский физик-экспериментатор Майкл Фарадей открывает закон электромагнитной индукции. Это событие и можно считать отправной точной в электрификации планеты. Дальнейшее развитие и практическое применение этих знаний было лишь вопросом времени.

- В 1834 году русский физик Б.С. Якоби представил миру конструкцию первой электрической машины, ставшую, как потом оказалось, прототипом всех современных электродвигателей.

- Следующим существенным шагом стало появление трансформаторов и их практическое использование. В 1876 году это открытие сделал русский ученый П.Н. Яблочков. Он же изобрел электрические свечи и доказал практическую пользу и безопасность применения переменного тока.
Интересно знать! До изысканий Яблочкова всем научным мировым сообществом считалось, что использовать переменный ток невозможно и опасно.

- В 1889 году русский инженер М.О. Доливо-Добровольский изобретает трехфазный асинхронный двигатель, благодаря чему электрические машины в промышленности стали применяться наиболее широко. Конструкция данного аппарата была крайне простой и одновременно надежной.
- В итоге к началу 20-го века уже были созданы все основные виды электрических машин, которые активно применяются и по сей день. Их используют в разных отраслях промышленности и приборах.
Микромашины в электротехнике
Помимо мощных агрегатов также потребовались и машины малой мощности, называемые еще микромашинами. Они активно применяются в устройствах вычислительной техники и автоматики в качестве функциональных элементов.



- Эти типы устройств принято делить на три группы: электромашинные усилители, исполнительные двигатели и информационные машины.
- Первые служат для усиления мощности электрических сигналов.
- Исполнительные двигатели занимаются преобразованием электрического тока в механическую силу. Эти аппараты могут быть асинхронными, шаговыми и постоянного тока.

- Информационные машины состоят из тахогенераторов, сельсин, магнесин и вращающихся трансформаторов. Назначение этих устройств – преобразование величин неэлектрической природы в электрические сигналы. В частности, тахогенератор постоянного тока измеряет скорость вращения некоего объекта и применяется он в различных устройствах электропривода, станках, транспорте и прочем.
Принцип работы тахогенераторов и их строение

Тахогенератор – устройство оборудованное валом, которое, при его вращении, выдает на выходе электрическое напряжение, величина которого прямо пропорциональна скорости, с которой вал вращается. Эта особенность означает, что двигатель постоянного тока с тахогенератором, по сути, оснащен датчиком, с постоянными магнитами или независимым внешним возбуждением.

- Конструкция тахогенератора практически неотличима от конструкции других машин постоянного тока. Используют их для измерения частоты вращения по значению выходного напряжения и для получения электрического сигнала с частотой вращения вала в схемах авто регулирования.

- Съемка напряжения происходит через скользящий контакт, который традиционно состоит из медного коллектора и графитовых щеток.
- У такой конструкции есть особенность, что, из-за того, что на меди образуется оксидная пленка, может с некоторой периодичностью меняться сопротивление контакта. По этой причине происходят колебания напряжения выдаваемого тахогенератором, которые воспринимаются в виде шума.
Интересно знать! На низких оборотах шумы тахогенератора сравниваются с полезным сигналом.
- Несмотря на этот недостаток, данная конструкция остается самой популярной, так как графит обладает отличными скользящими свойствами, а значит, устройство служит значительно дольше, чем аналоги.
- Если требуется тахогенератор, лишенный указанного недостатка, то на коллектор наносят контактную дорожку из серебра. Этот металл не окисляется, а значит, показания сопротивления всегда остаются на одном уровне.
Тахогенераторы Long Life

- Технические характеристики тахогенераторов переменного тока данного типа впечатляют. Диапазон рабочих температур от -50 до +100 градусов по Цельсию. Возможность измерения скорости вращения с точностью 1:100000 в режиме реального времени.
- Цилиндр у этих устройств может быть полым или цельным.
- Крепление вала фланцевое или лаповое.
Схемы постоянной автоматики
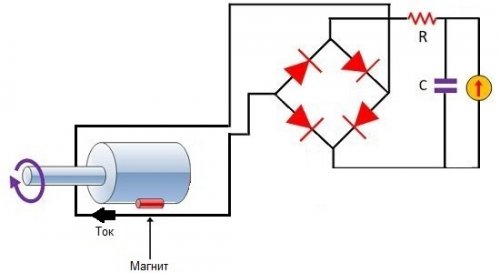
Итак, мы уже говорили, что тахогенераторы используются в автоматических схемах, теперь давайте подробнее разберем, как они там задействованы.

- Выше показана принципиальная схема подключения тахогенератора.
- Обмотка ОВ подключается к источнику постоянного тока. При этом тахогенератор, приходя в состояние возбуждения, и если его якорь приводится в движение с некой частотой, на выходе он начнет выдавать постоянное напряжение.
- При этом чем больше сопротивление прибора Rh, тем круче характеристика Сu на выходе. Значение наибольшей крутизны будет соответствовать холостому режиму работы тахогенератора – случается это когда обмотка у якоря размыкается.
- Соответственно, при росте нагрузки наблюдается обратное явление.
- Тахогенератор выдает на выходе характеристику тока в виде постоянной линии, но соответствует это действительности только на низких оборотах вращения. Если их увеличить, характеристика станет криволинейной. Если при этом уменьшается сопротивление нагрузки RH эффект кривизны также будет расти.
- Объясняется это тем, что якорь оказывает размагничивающее действие.
Совет! Чтобы генератор не выдавал криволинейную выходную характеристику, не нужно запускать его на максимально возможных оборотах, а в качестве нагрузки использовать только приборы, внутреннее сопротивление которых небольшое.

- Также стоит учитывать момент, что в реальных условиях наблюдается падение напряжения в щетках, из-за чего выходная характеристика идет не из начала координат, а с некоторым смещением. Данное явление – причина появления у тахогенераторов зоны нечувствительности, в которой не создается напряжение.
- Чтобы уменьшить зону нечувствительности применяют щетки с малым сопротивлением, обычно медно-графитовые или серебряно-графитовые. В моделях высокой точности используют щетки с серебряными или золотыми напайками. Однако все равно эти приборы имеют некоторую погрешность, в пределах 0,2-0,5%.
Асинхронный тахогенератор
Конструкция асинхронного тахогенератора точно такая же, как у асинхронного электродвигателя с немагнитным ротором (полым).
- Обмотка возбуждения статора подключается к источнику переменного тока, а выходное напряжение снимается с генераторной обмотки (ГО).
- Его принцип действия состоит в следующем – обмотка возбуждения запитывается переменным током некоторой частоты, в результате чего возникает пульсирующий магнитный поток, постоянно меняющий направление.

- Из-за воздействия данного магнитного поля во вращающемся роторе индуцируется два типа ЭДС – вращения и трансформаторная.
- На контурах, что перпендикулярны оси обмотки возбуждения, также начинают протекать токи, вызываемые ЭДС вращения. Эти токи также, пульсируя, индуцируют новую ЭДС – выходную.
- Если не углубляться в физические расчеты, то можно сказать, что асинхронный тахогенератор является несимметричным двухфазным агрегатом, который может быть исследован симметричными составляющими.
Погрешности асинхронных тахогенераторов
Выходное напряжение, выдаваемое данным типом тахогенераторов – комплексная величина, что говорит о фазовой и амплитудной погрешностях.

- Фазовая погрешность – это отклонение в градусах фазы напряжения на выходе от базовой фазы напряжения, то есть напряжения возбуждения. Возникает данный эффект в основном за счет индуктивного сопротивления статора и в большей части ротора. Данный тип погрешности может быть уменьшен, за счет правильной подборки характеристики применяемой нагрузки.
- Амплитудная погрешность – это отклонение показаний напряжения от частоты вращения от идеального значения, в котором они должны быть равны. Выражается этот показатель в процентах.

Также как и в случае фазовой погрешности, уменьшение данного эффекта возможно за счет правильной настройки и калибровки асинхронного тахогенератора.
- Физические причины амплитудной погрешности следующие. Во-первых, происходит падение напряжения в обмотке генератора. Во-вторых, меняется ток возбуждения, а следом за ним и магнитный поток, так как трансформаторная ЭДС ротора вызывает размагничивание. Третья причина – это то, что магнитный поток генераторной обмотки противостоит магнитному потоку вращения, из-за чего тот несколько уменьшается.
- Также стоит помнить, что ротор имеет некоторое индуктивное сопротивление, что также влияет на магнитный поток вращения, уменьшая его.
- И последнее – магнитный поток вращения индуцирует ЭДС вращения, а значит, появляются новый ток и магнитное поле, которое также противостоит потоку возбуждения. Данная электродвижущая сила является пропорциональной угловой скорости вращения, а значит, при увеличении частоты вращения ротора она тоже будет расти и противодействие усилится. Выражается это в падении напряжения в обмотке возбуждения и уменьшении магнитного потока вращения.
- Интересно, что одновременно понизить и фазовую и амплитудную погрешность невозможно. Поэтому схему подключения отлаживают так, чтобы снизить наиболее влияющие погрешности в конкретном случае.
Интересно знать! На практике доказано, что при низких оборотах вращения тахогенератора асинхронного типа оба типа погрешностей достаточно малы, из-за чего диапазоны вращения устройств ограничивают конкретными значениями.
Данные типы погрешностей хоть и являются основными, но они далеко не единственные:
- Нулевой сигнал – это напряжение, имеющееся на обмотке генератора в момент, когда ротор неподвижен. Данный параметр не остается постоянным, так как меняется при повороте ротора. Состоит он из двух составляющих: постоянно и переменной.
- Постоянная переменная возникает из-за неточного сдвига обмоток; присутствием короткозамкнутых контуров в обмотках и сердечнике; неодинаковой магнитной проходимости; неравномерного воздушного зазора; потоков рассеяния и прочего.
- Переменная составляющая обусловлена неравномерной толщиной стенок ротора, если он полый, из-за чего возникает разность активного сопротивления у контуров, а значит, и разность тока и магнитного потока.
- Чтобы ослабить постоянную составляющую нулевого сигнала, обмотки устанавливают на разных статорах: одна ставится на внутреннем, другая на наружном. При этом во время сборки асинхронного тахогенератора внутренний статор проворачивается, пока нулевой сигнал не достигнет минимального значения.
- Побороть переменную составляющую можно только калибровкой ротора, его симметричностью.

- Следующая погрешность называется асимметрией выходного напряжения. Выражается она неравенством выдаваемых тахогенератором напряжений при вращении в разные стороны. Эффект особенно заметен при малых оборотах.
- Причина явления связана с остаточной ЭДС от нулевого сигнала, ведь его фаза остается постоянной, тогда как фаза вращения смещается на 180 градусов. Борются с проблемой за счет уменьшения нулевого сигнала.
- Последний вид погрешности является температурным. Влияние температуры окружающей среды, а также нагревания во время работы ротора, сказывается так, что изменяется активное сопротивление у обмоток на статоре и роторе. Все это сказывается, в свою очередь, на идеальном выходном напряжении, и увеличивает амплитудную и фазовую погрешности.
- Чтобы стабилизировать изменение сопротивления обмотки возбуждения, последовательно подключают терморезисторы. Ротор же изготавливается из материалов с максимально низким температурным коэффициентом.
В завершение
Итак, мы разобрали принципы и назначение тахогенератора. Устройства эти применяются для сугубо специфических целей, но, как стало ясно, их строение практически не отличается от классического генератора постоянного тока. Есть некоторые нюансы относительно точности прибора, но в остальном все сходится.
Просмотрите видео в этой статье, чтобы увидеть практическое применение этих агрегатов.
Читайте также: