
Структурная классификация механизмов по ассуру реферат
Обновлено: 02.07.2024
Как отмечалось выше, структура любой технической системы определяется функционально связанной совокупностью элементов и отношений между ними. При этом для механизмов под элементами понимаются звенья, группы звеньев или типовые механизмы, а под отношениями подвижные (КП) или неподвижные соединения.
Содержимое работы - 1 файл
Структура механизмов.docx
K = pi - n = 12 - 8 = 4,
K - число независимых контуров в механизме;
pi - число КП в механизме;
n - число подвижных звеньев в механизме.
Структурная классификация механизмов по Ассуру Л.В.
Для решения задач синтеза и анализа сложных рычажных механизмов профессором Петербургского университета Ассуром Л.В. была предложена оригинальная структурная классификация. По этой классификации механизмы не имеющие избыточных связей и местных подвижностей состоят из первичных механизмов и структурных групп Ассура (см. рис. 2.6).
Под первичным механизмом понимают механизм, состоящий из двух звеньев (одно из которых неподвижное) образующих кинематическую пару с одной Wпм=1 или несколькими Wпм = 1 подвижностями. Примеры первичных механизмов даны на рис. 2.7.
Структурной группой Ассура (или группой нулевой подвижности) называется кинематическая цепь, образованная только подвижными звеньями механизма, подвижность которой (на плоскости и в пространстве) равна нулю (Wгр = 0).
Конечные звенья групп Ассура, входящие в две кинематические пары, из которых одна имеет свободный элемент звена, называются поводками. Группы могут быть различной степени сложности. Структурные группы Ассура делятся на классы в зависимости от числа звеньев, образующих группу, числа поводков в группе, числа замкнутых контуров внутри группы. В пределах класса (по Ассуру) группы подразделяются по числу поводков на порядки (порядок группы равен числу ее поводков). Механизмы классифицируются по степени сложности групп входящих в их состав. Класс и проядок механизма определяется классом и порядком наиболее сложной из входящих в него групп. Особенность структурных групп Ассура - их статическая определимость. Если группу Ассура свободными элементами звеньев присоединить к стойке, то образуется статически определимая ферма. Используя группы Ассура удобно проводить структурный, кинематический и силовой анализ механизмов. Наиболее широко применяются простые рычажные механизмы, состоящие из групп Ассура 1-го класса 2-го порядка. Число разновидностей таких групп для плоских механизмов с низшими парами невелико, их всего пять (см. рис. 2.8)
Для этих групп разработаны типовые методы структурного, кинематического и силового анализа. При структурном синтезе механизма по Ассуру (рис.2.6) к выбранным первичным механизмам с заданной подвижностью W0 последовательно присоединяются структурные группы c нулевой подвижностью. Полученный таким образом механизм обладает рациональной структурой, т.е. не содержит избыточных связей и подвижностей. Структурному анализу по Ассуру можно подвергать только механизмы не содержащие избыточных связей и подвижностей. Поэтому перед проведением структурного анализа необходимо устранить избыточные связи и выявить местные подвижности. Затем необходимо выбрать первичные механизмы и, начиная со звеньев наиболее удаленных от первичных, выделять из состава механизма структурные группы нулевой подвижности (схема на рис. 2.6). При этом необходимо следить, чтобы звенья, остающиеся в механизме, не теряли связи с первичными механизмами.
Несколько слов о историческом развитии классификации Ассура. В диссертационной работе Ассур разработал структурную классификацию для плоских рычажных шарнирных механизмов (т.е. для механизмов только с вращательными КП). В дальнейшем Артоболевский И.И. усовершенствовал и дополнил эту классификацию, распространив ее на плоские механизмы и с поступательными КП. При этом были изменены и принципы классификации. В плоских механизмах группами являются кинематические цепи с низшими парами, которые удовлетворяют условию Wгр = 3*nгр - 2*p1 = 0. Решения этого уравнения в целых числах определяют параметры групп Ассура. Эти параметры, а также классы простейших групп Ассура по Ассуру и по Артоболевскому приведены в таблице 2.2.
| Класс и порядок по Ассуру | 1 кл. 2 пор. | 1 кл. 3 пор. | |
| Число звеньев группы nгр | 2 | 4 | И т.д. |
| Число кинематических пар p1 | 3 | 6 | |
| Класс и порядок по Артоболевскому | 2 кл. 2 пор. | 3 кл. 3 пор. |
Проведем структурный анализ плоского механизма, схема которого приведена на рис. 2.4, и представим его в виде совокупности первичного механизма и структурных групп Ассура. Результаты структурного анализа изображены на рис. 2.9. Для рассматриваемого механизма структурный анализ можно проводить только для плоской модели, так как она не содержит избыточных связей. Механизм состоит из четырех структурных групп: двух рычажных двухповодковых ( группы звеньев 5-6 и 4-5) и двух групп с высшими парами одна из которых содержит только одно звено 2, вторая - два звена 7 и 8. Звено 7 и пара T введены в структуру механизма с целью замены трения скольжения трением качения, т.е. они обеспечивают местную подвижность ролика 7. За вычетом этой подвижности группа 7-8 имеет нулевую подвижность и является группой Ассура (точнее группой нулевой подвижности). Механизм имеет одну основную подвижность и, следовательно, один первичный механизм, состоящий из звеньев 1 и 0. Если рассмотреть полученные структурные группы как пространственные, то они не будут группами нулевой подвижности ибо обладают избыточными связями. Чтобы преобразить их в группы с нулевой подвижностью необходимо снизить классы кинематических пар, не допуская при этом возникновения местных подвижностей. При переходе от анализа механизма на плоскости к анализу в пространстве изменяются классы пар: одноподвижная поступательная КП D изменяется на двухподвижную цилиндрическую, двухподвижные высшие P и K на четырехподвижные. Далее по группам классы пар изменялись так:
группа звеньев 5-6
группа звеньев 3-4
группа звеньев 7-8
После таких изменений классов КП подвижность механизма
Wпр = 6*8 - (3*1 + 4*4 + 5*5 + 1*2) = 48 - 46 = 2,
где одна подвижность - основная, а вторая - местная.
В данном случае для устранения избыточных связей мы воспользовались способом снижения классов КП. Другой способ - введение в механизм дополнительных звеньев и КП. В заключение необходимо отметить, что устранять избыточные связи нужно не всегда. Многоподвижные КП сложнее и дороже в изготовлении, механизмы с такими парами часто обладают меньшей жесткостью и точностью, чем механизмы с одноподвижными КП.
Для решения задач синтеза и анализа сложных рычажных механизмов профессором Петербургского университета Ассуром Л.В. была предложена оригинальная структурная классификация. По этой классификации механизмы не имеющие избыточных связей и местных подвижностей состоят из первичных механизмов и структурных групп Ассура (см. рис. 2.6).
Под первичным механизмом понимают механизм, состоящий из двух звеньев (одно из которых неподвижное) образующих кинематическую пару с одной Wпм=1 или несколькими Wпм = 1 подвижностями. Примеры первичных механизмов даны на рис. 2.7.
Структурной группой Ассура (или группой нулевой подвижности) называется кинематическая цепь, образованная только подвижными звеньями механизма, подвижность которой (на плоскости и в пространстве) равна нулю (Wгр = 0).
Конечные звенья групп Ассура, входящие в две кинематические пары, из которых одна имеет свободный элемент звена, называются поводками. Группы могут быть различной степени сложности. Структурные группы Ассура делятся на классы в зависимости от числа звеньев, образующих группу, числа поводков в группе, числа замкнутых контуров внутри группы. В пределах класса (по Ассуру) группы подразделяются по числу поводков на порядки (порядок группы равен числу ее поводков). Механизмы классифицируются по степени сложности групп входящих в их состав. Класс и проядок механизма определяется классом и порядком наиболее сложной из входящих в него групп. Особенность структурных групп Ассура - их статическая определимость. Если группу Ассура свободными элементами звеньев присоединить к стойке, то образуется статически определимая ферма. Используя группы Ассура удобно проводить структурный, кинематический и силовой анализ механизмов. Наиболее широко применяются простые рычажные механизмы, состоящие из групп Ассура 1-го класса 2-го порядка. Число разновидностей таких групп для плоских механизмов с низшими парами невелико, их всего пять (см. рис. 2.8)
Для этих групп разработаны типовые методы структурного, кинематического и силового анализа. При структурном синтезе механизма по Ассуру (рис.2.6) к выбранным первичным механизмам с заданной подвижностью W0 последовательно присоединяются структурные группы c нулевой подвижностью. Полученный таким образом механизм обладает рациональной структурой, т.е. не содержит избыточных связей и подвижностей. Структурному анализу по Ассуру можно подвергать только механизмы не содержащие избыточных связей и подвижностей. Поэтому перед проведением структурного анализа необходимо устранить избыточные связи и выявить местные подвижности. Затем необходимо выбрать первичные механизмы и, начиная со звеньев наиболее удаленных от первичных, выделять из состава механизма структурные группы нулевой подвижности (схема на рис. 2.6). При этом необходимо следить, чтобы звенья, остающиеся в механизме, не теряли связи с первичными механизмами.
Несколько слов о историческом развитии классификации Ассура. В диссертационной работе Ассур разработал структурную классификацию для плоских рычажных шарнирных механизмов (т.е. для механизмов только с вращательными КП). В дальнейшем Артоболевский И.И. усовершенствовал и дополнил эту классификацию, распространив ее на плоские механизмы и с поступательными КП. При этом были изменены и принципы классификации. В плоских механизмах группами являются кинематические цепи с низшими парами, которые удовлетворяют условию Wгр = 3*nгр - 2*p1 = 0. Решения этого уравнения в целых числах определяют параметры групп Ассура. Эти параметры, а также классы простейших групп Ассура по Ассуру и по Артоболевскому приведены в таблице 2.2.
| Класс и порядок по Ассуру | 1 кл. 2 пор. | 1 кл. 3 пор. |
| Число звеньев группы nгр | и т. д. | |
| Число кинематических пар p1 | ||
| Класс и порядок по Артоболевскому | 2 кл. 2 пор. | 3 кл. 3 пор. |
Проведем структурный анализ плоского механизма, схема которого приведена на рис. 2.4, и представим его в виде совокупности первичного механизма и структурных групп Ассура. Результаты структурного анализа изображены на рис. 2.9. Для рассматриваемого механизма структурный анализ можно проводить только для плоской модели, так как она не содержит избыточных связей. Механизм состоит из четырех структурных групп: двух рычажных двухповодковых ( группы звеньев 5-6 и 4-5) и двух групп с высшими парами одна из которых содержит только одно звено 2, вторая - два звена 7 и 8. Звено 7 и пара T введены в структуру механизма с целью замены трения скольжения трением качения, т.е. они обеспечивают местную подвижность ролика 7. За вычетом этой подвижности группа 7-8 имеет нулевую подвижность и является группой Ассура (точнее группой нулевой подвижности). Механизм имеет одну основную подвижность и, следовательно, один первичный механизм, состоящий из звеньев 1 и 0. Если рассмотреть полученные структурные группы как пространственные, то они не будут группами нулевой подвижности ибо обладают избыточными связями. Чтобы преобразить их в группы с нулевой подвижностью необходимо снизить классы кинематических пар, не допуская при этом возникновения местных подвижностей. При переходе от анализа механизма на плоскости к анализу в пространстве изменяются классы пар: одноподвижная поступательная КП D изменяется на двухподвижную цилиндрическую, двухподвижные высшие P и K на четырехподвижные. Далее по группам классы пар изменялись так:
| группа звеньев 5-6 |
| группа звеньев 3-4 |
| группа звеньев 7-8 звено 2 |
После таких изменений классов КП подвижность механизма
W пр = 6*8 - (3*1 + 4*4 + 5*5 + 1*2) = 48 - 46 = 2,
где одна подвижность - основная, а вторая - местная.
В данном случае для устранения избыточных связей мы воспользовались способом снижения классов КП. Другой способ - введение в механизм дополнительных звеньев и КП. В заключение необходимо отметить, что устранять избыточные связи нужно не всегда. Многоподвижные КП сложнее и дороже в изготовлении, механизмы с такими парами часто обладают меньшей жесткостью и точностью, чем механизмы с одноподвижными КП.
Лекция 3. Геометрические и кинематические характеристики механизмов.
Рассмотрение особенностей структуры и графо-аналитического метода кинематического анализа шестизвенной группы Ассура. Ознакомление с требованиями к созданию новых машин и механизмов. Изучение и характеристика схемы плана скоростей для механизмов.
| Рубрика | Производство и технологии |
| Вид | статья |
| Язык | русский |
| Дата добавления | 20.01.2018 |
| Размер файла | 489,9 K |
Студенты, аспиранты, молодые ученые, использующие базу знаний в своей учебе и работе, будут вам очень благодарны.
О структуре и кинематике одной шестизвенной группы Ассура
П.В. Дубровин, В.Ф. Доброродный
В статье рассматриваются структура и графо-аналитический метод кинематического анализа шестизвенной группы Ассура. Проведен сравнительный анализ существующих методов кинематического анализа и предложен новый подход к структуре и кинематике шестизвенной группы Ассура.
Одним из направлений экономического развития любого государства является широкое применение в различных отраслях средств механизации и автоматизации производственных процессов. Это в свою очередь связано с применением или созданием новых механизмов, обладающих наперед заданными свойствами. Создание новых машин и механизмов либо использование существующих возможно лишь на основе серьезного научного анализа, позволяющего обеспечивать высокую эффективность машин уже на стадии их проектирования. Процесс проектирования в обязательном порядке должен включать этапы выбора структурной схемы, кинематического и силового расчетов. Каждый этап процесса проектирования механизма одинаково важен. Очевидно, что в зависимости от выбора структурной схемы механизма можно получать те или иные свойства.
Л.В. Ассур показал, что кинематическую цепь механизма целесообразно рассматривать как состоящую из ведущей и ведомой цепей. Одно из свойств ведомой цепи таково, что во многих случаях ведомую цепь можно разделить на части, каждая из которых обладает такими же основными свойствами, как и вся ведомая цепь в целом. Эти части называются структурными группами Ассура. Вопросы кинематического анализа структурных групп Ассура должны занимать в процессе проектирования механизма весомое место. Зная свойства групп Ассура, можно точно знать свойства проектируемого механизма. До настоящего времени кинематический анализ групп Ассура проводился в составе механизма. Если следовать указаниям Ассура, все свойства механизма должны определяться свойствами группы Ассура.
Вопросам кинематического анализа групп Ассура в составе механизма посвящено множество работ. Разработано множество методов кинематического анализа групп Ассура в составе механизма. Особенно разработанными являются методы исследования двухзвенных групп (диад). В меньшей степени разработаны и известны методы анализа четырехзвенных групп. Группы же Ассура, включающие в своем составе шесть звеньев, только в последнее время стали объектом структурного и кинематического исследования. Наиболее полно и всесторонне шестизвенные группы Ассура рассматриваются в работах Л.Т. Дворникова, С.П. Старикова [1]. Тем не менее, вопросы структуры и кинематики этих групп Ассура требуют, на наш взгляд, своего дальнейшего исследования.
Как показывает практика различных отраслей промышленности, широкое применение находят механизмы, включающие в своем составе шестизвенные группы Ассура. Это объясняется их высокими кинематическими возможностями: получение необходимых траекторий, длительных выстоев выходных звеньев, высокая жесткость и т.д. Исходя из этого можно утверждать, что разработка методов кинематического исследования шестизвенных плоских групп является проблемой весьма актуальной.
Нетрудно заметить, что в этом случае шестизвенная группа Ассура представляет собой механизм 2-го класса (звенья 6, 5, 4) по классификации И.И. Артоболевского с присоединеной к нему диадой (звенья 3, 2). При наложении на него геометрической связи в виде поводка 1 он превращается в группу Ассура. Если эту группу Ассура присоединить к ведущему звену (при W =1), то получается механизм 3-го класса по классификации И.И. Артоболевского со всеми вытекающими последствиями - сложность кинематического анализа, по сравнению с механизмами 2-го класса.
Кинематический анализ группы Ассура в составе механизма
На рисунке 2 представлена исходная шестизвенная группа Ассура в составе механизма с одной степенью подвижности.
Используя метод замены ведущего звена, построим для всего механизма план скоростей по следующим векторным уравнениям. В качестве ведущего звена принято звено 6.
На рисунке 2 показан механизм 3-го класса с шестизвенной группой Ассура и план скоростей. кинематический ассур механизм
Кинематический анализ группы Ассура методом замены ведущего звена вне состава механизма (рисунок 3)
Построение плана скоростей для группы Ассура вне состава механизма будем вести в следующем порядке. В начале группу Ассура представим как механизм (звенья 2, 3, 4, 5, 6) с наложенной связью (звено 1). Следует заметить, что в этом случае снижается класс механизма до второго и класс групп Ассура, входящих в исходный механизм Рассмотрим кинематику механизма без связи -- звено 1. В качестве ведущего звена примем звено 6 (ничего не измениться, если в качестве ведущего звена принять звено 1. Построение плана скоростей будем вести по уравнениям:
Нетрудно заметить, что в этом случае мы не можем найти только абсолютную скорость будущего ведущего звена 1, т.к. оно у нас пока не дано. Если положение ведущего звена будет известно, то достаточно из найденного абсолютного полюса плана скоростей провести линию действия скорости точки А до пересечения с продолжением отрезка bs1/ Все остальные скорости останутся без изменения. Как видно, план скоростей для самой группы Ассура целиком и полностью соответствует плану скоростей, построенному с использованием метода замены ведущего звена для группы Ассура в составе механизма (рисунок 2). Это дает основание утверждать, что кинематический анализ группы Ассура с учетом наложенной связи заслуживает внимания и изучения, во всяком случае для рассматриваемой группы Ассура.
Литература
2. Дворников Л.Т. Кинематическое и кинетостатическое исследование двухсекционного грохота // Вестник Кузбасского государственного технического университета. - 2008. - № 1 (65). - С. 44-46.
3. Стариков С.П. Кинематическая разрешимость семизвенного кривошипно-ползунного механизма для прессования // Наука и молодежь: проблемы, поиски, решения. Труды Всероссийской научной конференции студентов, аспирантов и молодых ученых / Под ред. С. М. Кулакова. - Новокузнецк: Из-во СибГИУ. Техн. Науки. - 2008. - Ч. II. - Вып. 8. - С. 264 -
Подобные документы
Основные понятия и определение машин, механизмов, звеньев и кинематических пар. Группы Ассура. Расчет числа степеней свободы плоских и пространственных механизмов, анализ структуры плоских рычажных механизмов. Пассивные связи и избыточные подвижности.
шпаргалка [3,6 M], добавлен 15.12.2010
Структурный анализ рычажного механизма, наименование звеньев. Кинематические пары и их модификация. Разделение механизма на структурные группы (группы Ассура). Построение планов скоростей. Таблица длин звеньев. диаграмма перемещений "S-t", "V-t".
курсовая работа [97,4 K], добавлен 11.10.2015
Структурное исследование плоского механизма и выполнение анализа кинематических пар. Разделение механизма на структурные группы Ассура. Масштаб построения плана скоростей. Определение кориолисова ускорения. Синтез эвольвентного зубчатого зацепления.
курсовая работа [1,1 M], добавлен 20.04.2013
Характеристика кинематической схемы механизма в масштабе для заданного угла и положения кривошипа. Сущность и класс структурной группы Ассура. Анализ степени подвижности механизма. Принципы графоаналитического метода и кинетостатического расчета.
курсовая работа [2,2 M], добавлен 25.03.2015
Способы подбора чисел зубьев планетарного механизма. Рассмотрение этапов кинематического расчета редуктора графоаналитическим методом. Знакомство с проблемами построения графика линейных скоростей. Характеристика условий синтеза планетарных механизмов.
Таким образом, число звеньев в группе п должно быть четным, а количество кинематических пар — числом, кратным трем. Возможные сочетания количества звеньев и кинематических пар дают возможность получать различные по сложности строения структурные группы. Простейшая из них имеет и называется двухповодковой группой (по числу звеньев — поводков) (рис. 1.9). Если один крайний элемент такой группы… Читать ещё >
Принципы построения и структурная классификация механизмов ( реферат , курсовая , диплом , контрольная )
Метод классификации плоских механизмов и принципы их построения были разработаны в начале XX в. русским ученым Л. В. Ассуром . Предложенный им метод позволяет проводить классификацию плоских механизмов, удовлетворяющих формуле Чебышева (1.3). Академик И. И. Артоболевский распространил классификацию Л. В. Ассура на пространственные механизмы. Практическое значение классификации заключалось в том, что она давала возможность устанавливать соответствие степени сложности механизма (его класса) методам его исследования и построения.
Построение механизма по Ассуру состоит в последовательном присоединении к ведущим звеньям и стойке особых кинематических цепей, называемых структурными группами или группами Ассура, без изменения степени подвижности механизма в целом. Группа Ассура — кинематическая цепь с нулевой степенью подвижности относительно тех звеньев, к которым она присоединяется своими концевыми элементами и которая не распадается на более простые кинематические цепи с нулевой степенью подвижности.
Рассмотрим принцип построения механизмов методом наслоения групп Ассура на примере плоского механизма с одной степенью свободы, у которого положение всех звеньев определяется заданием одной обобщенной координаты (? или s). Построение механизма начинается с объединения ведущего звена и стойки. Согласно классификации Ассура — Артоболевского полученный таким образом механизм называется начальным механизмом 1-го класса (рис. 1.8, а, б). Начальный механизм имеет одну степень подвижности. Более сложные механизмы образуются присоединением (наслоением) к начальному механизму групп Ассура. Группы Ассура имеют лишь кинематические пары 5-го класса, поэтому, используя формулу (1.3), при W = 0 находим Отсюда
Таким образом, число звеньев в группе п должно быть четным, а количество кинематических пар - числом, кратным трем. Возможные сочетания количества звеньев и кинематических пар дают возможность получать различные по сложности строения структурные группы. Простейшая из них имеет и называется двухповодковой группой (по числу звеньев — поводков) (рис. 1.9). Если один крайний элемент такой группы (элемент В на рис. 1.9, а) присоединить к ведущему звену 1, а другой, крайний элемент D — к стойке 2, то образуется механизм, называемый плоским шарнирным четырехзвенником (см. рис. 1.1).

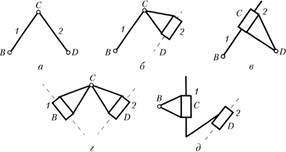
Группы Ассура имеют внутренние и внешние кинематические пары. Внутренние пары соединяют между собой звенья группы, а внешними парами группа присоединяется костальной кинематической цепи. Число внешних кинематических пар определяет порядок группы Ассура. Например, упоминавшаяся выше двухповодковая группа называется группой Ассура второго порядка.
Структурные группы, у которых , в зависимости от количества вращательных и поступательных кинематических пар и последовательности их расположения могут быть пяти различных видов (рис. 1.9, а — д). Четырехзвенные структурные группы, имеющие , могут быть трехповодковыми третьего порядка (рис. 1.10, о) и четырехзвенными второго порядка с подвижным четырехсторонним контуром (рис. 1.10, б). Отличительная особенность трехповодковой группы — наличие внутреннего базисного звена, входящего в три кинематические пары. Различные виды двух последних групп Ассура можно также получить путем замены вращательных кинематических пар поступательными. Структурные группы с числом звеньев более четырех встречаются в механизмах крайне редко.
И. И. Артоболевский расширил и модифицировал классификацию Л. В. Ассура . По классификации И. И. Артоболевского двухповодковая структурная группа условно относится к группам 2-го класса и имеет второй порядок. Класс группы выше второго определяется числом кинематических пар, входящих в замкнутый контур, который образован внутренними кинематическими парами. Поэтому трехповодковая группа, имеющая три внутренние кинематические пары и ба;
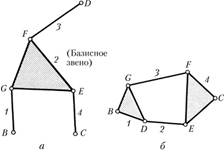
зисное звено (см. рис. 1.10, а), относится к 3-му классу и имеет третий порядок (по числу внешних кинематических пар). Четырехзвенная группа, имеющая четыре внутренние кинематические пары (см. рис. 1.10, б), относится к 4-му классу и имеет второй порядок.
Структурный анализ механизмов (исследование структуры механизмов) предполагает:
- • определение количества звеньев механизма, числа и класса его кинематических нар;
- • определение степени подвижности механизма;
- • разделение механизма на начальные механизмы и структурные группы;
- • определение класса и порядка структурных групп.
Результатом структурного анализа является определение класса всего механизма, который соответствует наивысшему классу группы Ассура, входящей в состав механизма. Определение класса механизма, согласно классификации Ассура — Артоболевского, возможно, если в результате предварительного структурного анализа установлено выполнение следующих условий:
- • степень подвижности механизма соответствует количеству ведущих звеньев;
- • ведущие звенья входят в кинематические пары со стойкой;
- • в механизме имеются только кинематические пары 5-го класса.
Рекомендуется следующая последовательность отделения структурных групп из кинематической цепи механизма. Отделение групп начинается со звеньев, наиболее удаленных от ведущего звена. В первую очередь отделяются группы Ассура наиболее низкого класса. Следует иметь в виду, что после отделения каждой группы степень подвижности механизма должна оставаться неизменной, а каждое звено и кинематическая пара могут входить только в одну структурную группу. Разделение кинематической цепи механизма на группы Ассура ведется до тех пор, пока не останутся только начальные механизмы (ведущие звенья и стойка).
Поясним структурный анализ и классификацию механизмов по Ассуру — Артоболевскому на примере механизма, показанного на рис. 1.11. Механизм имеет пять подвижных.


звеньев (п = 5) и семь кинематических пар 5-го класса . По формуле (1.3) определяем степень подвижности механизма.

Ведущее звено 1 со стойкой 6 образуют механизм 1-го класса. Ведомую кинематическую цепь можно разделить па две группы Ассура 2-го класса (выделены на рис. 1.11 контурными линиями), начиная с группы, которая состоит из звеньев 4, 5.
Так как механизм имеет в своем составе только группы Ассура 2-го класса, то его следует отнести к механизмам 2-го класса.
Принципы построения механизмов по Ассуру — Артоболевскому удобно использовать как при структурном анализе, так и при структурном синтезе механизмов. Уже на этапе проектирования машин их закладываемая работоспособность и надежность во многом зависят от того, насколько правильно и рационально выбраны схема построения механизма и его структура.
Читайте также: