
Роботы на производстве сходства и различия реферат
Обновлено: 02.07.2024
Революционные преобразования массового производства диктуются высокими темпами научно-технического прогресса, быстрой сменяемостью объектов производства. Растягивание сроков выпуска конкретной модели автомобиля, трактора, электродвигателя до сроков, сопоставимых со сроками предельного износа производственного оборудования, означает отставание в техническом прогрессе. А списывать огромное количество специального оборудования после нескольких лет или месяцев работы губительно для экономики.
Не менее значительные коренные преобразования должно претерпеть серийное и индивидуальное производство, и движущими здесь являются в первую очередь факторы социальные.
Быстрый рост образовательного, культурного, материального уровня трудящихся, когда подавляющая часть рабочих имеет образование не ниже среднего, существенно изменил наши требования к условиям работы и содержательности трудовых процессов.
Ручной труд, особенно малоквалифицированный, монотонный и
тяжелый, становится все более непривлекательным, не престижным,
Таким образом, к двум традиционным видам производства необходимо добавить третий—гибкое автоматизированное производство, которое призвано обеспечить выпуск разнообразнейшей продукции, как на универсальных станках, но без участия человека, так и на автоматических линиях.
Есть все основания полагать, что именно предстоящее десятилетие станет переломным этапом в развитии техники производств, историческим рубежом между эпохами господства неавтоматизированного и автоматизированного производства. Потому что именно сейчас для этого созрели, с одной стороны, острейшая социальная необходимость, с другой — необходимые научно-технические предпосылки, связанные с появлением и развитием многих новейших средств автоматизации.
К ним относятся в первую очередь автоматические системы управления на основе средств вычислительной техники и промышленные роботы, которые призваны революционизировать производство, поднять его на качественно более высокий уровень.
Появление и развитие промышленных роботов, безусловно, явились одним из крупнейших достижений науки и техники последних лет. Они позволили расширить фронт работ по автоматизации технологических и вспомогательных процессов, открыли широкие перспективы создания автоматических систем машин для гибкого, переналаживаемого производства.
Промышленные роботы избежали периода недоверия и недооценки, трудностей становления. Наоборот, ни одному техническому средству не доставалось даже авансом столько восторженных похвал, ни одному не уделялось столько внимания. Об этом можно составить представление хотя бы по материалам данной книги. В нашей стране за короткие сроки создана целая сеть специализированных предприятий и организаций по роботостроению во многих машиностроительных и приборостроительных министерствах. Если в десятой пятилетке было выпущено около 6 тыс., в одиннадцатой — почти 50, то в двенадцатой пятилетке намечено выпустить около 100 тыс. промышленных роботов.
Казалось бы, сочетание безусловной прогрессивности и повышенного внимания должно было обеспечить триумфальное шествие роботов, их весомый вклад в решение задач интенсификации производства, сокращения ручных работ и т. п. Однако пока этого не происходит.
Возьму на себя смелость утверждать, что роботизация производства переживает сейчас серьезный кризис, который выражается в явном несоответствии между затратами сил и средств, с одной стороны, и реальной их отдачей—с другой. И кризис вызван не какими-то вдруг открывшимися недостатками промышленных роботов, а допущенными просчетами в осуществлении технической политики в области роботизации.
Автор книги приводит некоторые данные об этом. Согласно проведенному анализу в Англии 44 % фирм, занявшихся роботизацией производства, объявили о неудачах, и цифра эта представляется скорее заниженной, потому что далеко не всякая фирма отважится признаться в своих просчетах. Половина из указанных фирм объявила о прекращении работ по роботизации производства.
По нашему мнению, создавшаяся в настоящее время ситуация обусловлена комплексом объективных и субъективных факторов.
Идет становление принципиально нового научно-технического направления, и трудности и неудачи здесь неизбежны. Промышленные роботы имеют слишком короткую историю, чтобы обладать одними достоинствами и не иметь недостатков в конструкциях и практике применения.
Прежде всего она глубоко ошибочна в сущности. Робот не может заменить человека. Человека может заменить лишь другой человек, желательно более сильный, квалифицированный, добросовестный.
В разнообразии функций и возможностей, подвластных человеку, в том числе в сфере производства, роботы в состоянии взять на себя лишь считанное число функций, которые во многих случаях не превышают возможности таких традиционных средств механизации и автоматизации, как ленточные транспортеры, вибрационные загрузочные устройства, обычные манипуляторы с цикловым управлением, которые известны уже десятки лет. Более того, все те отличительные свойства по сравнению с человеком, которые мы восторженно приписываем промышленным роботам, на самом деле Обычные свойства любых технических средств производства. Ленточный транспортер тоже заменяет человека, высвобождая его от тяжелого ручного труда, вообразите себе армаду, грузчиков с мешками на плечах, бегущих рысью через весь цех. Ленточный транспортер не курит, не прогуливает и не требует квартиры для семьи или места в детском саду, но никому в голову не приходило подобными аргументами обосновывать применение данных транспортеров, например, по сравнению с цепными конвейерами.
Превратное понимание роботизации, нацеливание ее не на решение коренных проблем повышения эффективности производства (качество, производительность, себестоимость), а лишь на имитацию некоторых ручных действий человека в надежде, что все остальное приложится, тоже не столь безобидны, как это может показаться.
В то же время при загрузке металлорежущих станков промышленные роботы на качество изделий не влияют. По производительности оборудования, как правило, получается проигрыш, так как ручная загрузка деталей массой до 3—5 кг выполняется человеком в несколько раз быстрее. Следовательно, выигрыш можно получить лишь по фонду заработной платы, да и то незначительный, так как один рабочий обслуживает 2—3 станка с ЧПУ и без роботов. Почему же тогда подавляющее большинство разработок адресуется не сварке, окраске, гальванопроизводству, а загрузке металлорежущих станков или прессов, т.е. наименее перспективным направлениям? Ответ один — если подходить к роботизации как к задаче имитации действий человека, то так проще, легче, удобнее.
Эволюция современного общества и производства обусловила возникновение и развитие нового класса машин - роботов - и соответствующего научного направления - робототехники. Робототехника интенсивно развивающаяся научно-техническая дисциплина, изучающая не только теорию, методы расчета и конструирования роботов, их систем и элементов, но и проблемы комплексной автоматизации производства и научных исследований с применением роботов. Следует заметить, что термин "робототехника" используется и в другом контексте, означая совокупность техники (машин, оборудования, агрегатов и др.), оснащенной робототехническими устройствами либо функционирующей совместно с роботами в едином технологическом процессе. Во все времена научная и производственная деятельность человека определялась, с одной стороны, потребностью развития и усовершенствования общественного производства как базы для достижения экономического могущества, с другой - необходимостью исследования и освоения новых нетрадиционных пространств и сфер деятельности. Одним из решающих факторов ускоренного движения в экономике становится интенсификация промышленного производства, основой которого на современном этапе научно-технического и социального развития общества являются комплексная механизация и автоматизация. В этом направлении за последние годы в стране проделана немалая работа: созданы автоматизированные системы управления производством (АСУП), автоматизированные системы управления технологическим процессом (АСУ ТП), оснащенные ЭВМ, металлорежущие станки с программным управлением, обрабатывающие центры, специализированные автоматы и автоматические системы, роторные и роторно-конвейерные линии и др.
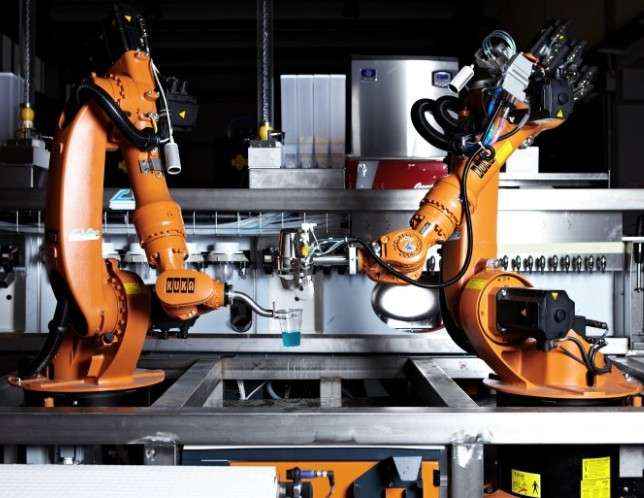
Промышленные роботы
Промышленный робот — автономное устройство, состоящее из механического манипулятора и перепрограммируемой системы управления, которое применяется для перемещения объектов в пространстве и для выполнения различных производственных процессов. Промышленные роботы являются важными компонентами автоматизированных гибких производственных систем (ГПС), которые позволяют увеличить производительность труда. Появление станков с числовым программным управлением (ЧПУ) привело к созданию программируемых манипуляторов для разнообразных операций по загрузке и разгрузке станков. Появление в 70-х гг. микропроцессорных систем управления и замена специализированных устройств управления на программируемые контроллеры позволили снизить стоимость роботов в три раза, сделав рентабельным их массовое внедрение в промышленности. Этому способствовали объективные предпосылки развития промышленного производства.
звенья, обеспечивающие поступательные движения;
звенья, обеспечивающие угловые перемещения.
Cамый простой тип системы управления, используется для управления манипуляторами на промышленных объектах. В таких роботах отсутствует сенсорная часть, все действия жёстко фиксированы и регулярно повторяются. Для программирования таких роботов могут применяться среды программирования типа VxWorks/Eclipse или языки программирования например Forth, Оберон, Компонентный Паскаль, Си. В качестве аппаратного обеспечения обычно используются промышленные компьютеры в мобильном исполнении PC/104 реже MicroPC. Может происходить с помощью ПК или программируемого логического контроллера.
Роботы с адаптивной системой управления оснащены сенсорной частью. Сигналы, передаваемые датчиками, анализируются и в зависимости от результатов принимается решение о дальнейших действиях, переходе к следующей стадии действий и т. д.
•Основанное на методах искусственного интеллекта.
•Управление человеком (например, дистанционное управление). Современные роботы функционируют на основе принципов обратной связи, подчинённого управления и иерархичности системы управления роботом. Иерархия системы управления роботом подразумевает деление системы управления на горизонтальные слои, управляющие общим поведением робота, расчётом необходимой траектории движения манипулятора, поведением отдельных его приводов, и слои, непосредственно осуществляющие управление двигателями приводов. Подчинённое управление cлужит для построения системы управления приводом. Если необходимо построить систему управления приводом по положению (например, по углу поворота звена манипулятора), то cистема управления замыкается обратной связью по положению, а внутри системы управления по положению функционирует система управления по скорости со своей обратной связью по скорости, внутри которой существует контур управления по току со своей обратной связью. Современный робот оснащён не только обратными связями по положению, скорости и ускорениям звеньев. При захвате деталей робот должен знать, удачно ли он захватил деталь. Если деталь хрупкая или её поверхность имеет высокую степень чистоты, строятся сложные системы с обратной связью по усилию, позволяющие роботу схватывать деталь, не повреждая её поверхность и не разрушая её. Управление роботом может осуществляться как человеком-оператором, так и системой управления промышленным предприятием (ERP-системой), согласующими действия робота с готовностью заготовок и станков с числовым программным управлением к выполнению технологических операций. Среди самых распространённых действий, совершаемых промышленными роботами можно назвать следующие:
• перемещение деталей и заготовок от станка к станку или от станка к системам сменных паллет
• сварка швов и точечная сварка
• выполнение операций резанья с движением инструмента по сложной траектории
• достаточно быстрая окупаемость
• исключение влияния человеческого фактора на конвейерных производствах, а также при проведении монотонных работ, требующих высокой точности
• повышение точности выполнения технологических операций и, как следствие, улучшение качества
• возможность использования технологического
оборудования в три смены, 365 дней в году
• рациональность использования производственных помещений
• исключение воздействия вредных факторов на персонал на производствах с повышенной опасностью
Ситуация с современной робототехникой в промышленности такова, что все больше и больше крупных производителей переоснащают свои производственные мощности на автоматизированный тип производства. Промышленные роботы уже становятся массовыми, внедряются во все большие разновидности работ, которые ранее выполнял человек. Существует множество спорных вопросов замещения человеческой работы роботами, так как при массовом распространении роботы заберут у людей часть рабочих мест, создав рост безработицы. Но, тем не менее, внедрение промышленных роботов уже является неоспоримым преимуществом производителей в гонке за эффективностью, качеством, скоростью и точностью, поэтому этот процесс - скорее дело времени.
История развития промышленных роботов
1954 год - первый программируемый робот был создан изобретателем Джорджем Деволом. Автор вводит термин промышленная автоматизация.
1956 год - Девол и инженер Джозеф Энгельбергер основывают первую компанию, занимающуюся разработкой промышленных роботов. Компания получила название Unimation.
1960 год - компанию Unimation приобретает корпорация Condec, начинается бурное развитие Unimate. Американский Machine и Литейный цех, Позже известный как AMF Corporation, рынки робота под названием Versatran , разработанная Гарри Джонсон и Велько Миленкович . AMF Corporation создает робота под названием Versatran, разработаного Гарри Джонсоном и Велько Миленковичем.
1962 год - на заводе Дженерал Моторс появился первый промышленный робот, он был разработан Деволом и Энгельбергером. Промышленный робот был предназначен для точечной сварки.
1969 год - компания Nachi начинает производство роботов.
1972 год - немецкий производитель роботов компания KUKA выпускает первого шести осевого электромеханического робота. Он получил название Famulus.
1974 год - разработан промышленный робот для сборки изделий малых размеров. Робот был оснащен датчиками обратной связи и датчиками давления. Новый манипулятор находился под управлением мини-ЭВМ.
1974 год - компания Fanuc начала производство промышленных роботов.
1977 год - Был создан промышленный робот Motoman L10 . Это был 5 осевой робот, с максимальной нагрузка 10 кг и весом 470 кг. Motoman L10 был первый робот, который компания Yaskawa представила на рынке.
1977 год - ASEA , Европейский производитель промышленных роботов (ныне АББ Робототехника), выпускает на рынок две модели роботов управляемых электроприводом. Оба робота используют микроЭВМ для программирования и эксплуатации.
1978 год - Vicarm , Unimation при поддержке со стороны General Motors создает робота под названием PUMA . Многие исследовательские лаборатории все еще используют эту модель робота.
1980 год - производство промышленных роботов начинает стремительно развиваться, на рынке каждый месяц появляются новые модели роботов и новые производители.
Классификация промышленных роботов
Классификация промышленных роботов:
1. По виду производства промышленных роботов делят на специальные, специализированные и универсальные.
• Специальные выполняют определенную технологическую операцию или вспомогательную модель оборудования;
• Специализированные выполняют операции одного вида, например сварку, сборку и обслуживают определенную группу моделей оборудования;
• Универсальные являются наиболее усовершенствованными представителями промышленных роботов, служат для выполнения разных операций и функционируют с оборудованием различного назначения (разнородных операций ).
2. По грузоподъемности различают сверхлегкие (грузоподъемность не более 1 кг.), легкие (грузоподъемность от 1 до 10 кг.), средние (грузоподъемность от 10 до 200 кг.), тяжелые (грузоподъемность от 200 до 1000 кг.) и сверхтяжелые (где грузоподъемность свыше 1000 кг.).
3. По возможности передвижения промышленных роботов подразделяют на стационарные и подвесные.
• Стационарные имеют ориентирующие и транспортирующие движения;
• Транспортирующие дополнительно к этим двум движениям (ориентирующие и транспортирующие) и координатные перемещения.
4. По числу степеней подвижности выпускают роботы с количеством осей до 6 (шести).
5. По способу установки П промышленных роботов делят на встроенные (хотя встроенные промышленные роботы и считаются компактными в плане габаритов, но при этом они обслуживают только один станок), подвесные и напольные (возможность обслуживания до 2-х и более станков, но при этом они имеют более сложные задачи, например обеспечить смену инструмента).
6. По виду управления ПР различают:
• Роботы с погромным управлением (цикловым, числовым, позиционным и контурным);
• Роботы с адаптивным управлением (промышленные роботы с адаптивным управлением имеют измерительные устройства и устройства для восприятия внешней среды, управляющая программа или УП в этом случае не должна содержать всю необходимую информацию).
7. По способу программирования различают промышленных роботов программируемые обучением ( по методу обучения оператор, управляя промышленным роботом приводит его из одного конечного положения в другое через серию точек, которые фиксируются в запоминающем устройстве промышленного робота и при обработке следующих деталей захватное устройство будет двигаться по этим точкам) и аналитические (путем расчета программ).
Функциональность промышленного робота определяется его способностью совершать разные по характеру движения: перестановочные (транспортные) перемещения между рабочими позициями, находящимися на расстоянии, большем, чем размеры рабочей зоны манипулятора; установочные перемещения в пределах рабочей зоны, определяемой конструкцией и размерами манипулятора; ориентирующие перемещения схвата, определяемые конструкцией и размерами кисти - конечного звена манипулятора. Промышленные роботы могут быть стационарными, не имеющими перестановочных перемещений, и передвижными, обеспечивающими все названные виды движений.
Заключение
Широкое распространение в производственной деятельности человека получили сегодня промышленные роботы. Они служат одним из эффективнейших средств механизации и автоматизации транспортных и погрузочных работ, а также многих технологических процессов.
Положительный эффект от внедрения промышленных роботов обычно заметен одновременно с нескольких сторон: растет производительность труда, улучшается качество конечного продукта, снижаются затраты на производство, улучшаются условия труда для человека, и наконец, переход предприятия с выпуска одного вида продукции на другой значительно облегчается.
Однако для достижения столь обширного и многогранного положительного эффекта от внедрения промышленных роботов на уже работающие ручные производства, необходимо предварительно рассчитать планируемые затраты на сам процесс внедрения, на стоимость робота, а также взвесить, адекватна ли вообще сложность вашего производства и технологического процесса — плану модернизации при помощи установки промышленных роботов.
Ведь иногда производство настолько упрощено изначально, что установка роботов просто нецелесообразна и даже вредна. К тому же для наладки, обслуживания, программирования роботов — потребуются квалифицированные кадры, а в процессе работы — вспомогательные устройства и т. д. это важно учитывать заранее.

Промышленные роботы в современном производстве
Так или иначе, роботизированные безлюдные решения на производствах приобретают сегодня все большую актуальность хотя бы потому, что вредное влияние на здоровье человека сводится к минимуму. Прибавим сюда понимание того, что полный цикл обработки и монтажа осуществляется быстрее, без перерывов на перекур и без ошибок, свойственных любому производству, где вместо робота действует живой человек. Человеческий фактор, после настройки роботов и запуска технологического процесса, практически исключается.
На сегодняшний день ручной труд в большинстве случаев замещается трудом робота манипулятора: инструментальный захват, фиксация инструмента, удержание заготовки, подача ее в рабочую зону. Ограничения накладывают лишь: грузоподъемность, ограниченность рабочей зоны, предварительно запрограммированные движения.
Промышленный робот способен, тем не менее, обеспечить:
- высокую производительность, благодаря быстрому и точному позиционированию
- лучшую экономичность, так как не нужно платить зарплату людям, которых он собой заменяет, достаточно одного оператора
- высокое качество — точность порядка 0.05 мм, низкая вероятность появления брака
- безопасность для здоровья людей, например в силу того, что при покраске теперь контакт людей с лакокрасочными материалами исключается
- наконец, рабочая зона робота строго ограничена, а обслуживание ему требуется минимальное, даже если рабочая среда химически агрессивна, материал робота выдержит это воздействие.
Промышленные роботы в современном производстве
Исторически первый промышленный робот, изготовленный по патенту, был выпущен в 1961 году компанией Unimation Inc для завода General Motors в Нью-Джерси. Последовательность действий робота записывалась в виде кода на магнитный барабан и выполнялась в обобщенных координатах. Для осуществления действий робот использовал гидроусилители. Данная технология потом была передана японской Kawasaki Heavy Industries и английской Guest, Keen and Nettlefolds. Так производство роботов от Unimation Inc несколько расширилось.
К 1970 году в Стэнфордском университете был разработан первый робот, напоминающий возможностями человеческую руку с 6 степенями свободы, который управлялся с компьютера, а приводы имел электрические. Одновременно разработки ведет японская Nachi. Немецкая KUKA Robotics в 1973 году продемонстрирует шестиосевого робота Famulus, а швейцарская ABB Robotics уже начнет продавать робота ASEA, — тоже шестиосевого и на электромеханическом приводе.
В 1974 японская компания Fanuc налаживает собственное производство. В 1977 выпускается первый робот Yaskawa. С развитием компьютерной техники роботы все больше внедряются в автомобилестроение: в начале 80-х General Motors вкладывает сорок миллиардов долларов в формирование собственной системы автоматизации заводов.

Промышленный робот сварщик
Как автомобильное производство обойдется без сварки? Никак. Вот и выходит, что все автомобильные производства мира оснащены сотнями комплексов роботизированной сварки. Каждый пятый промышленный робот занимается сваркой. Далее по востребованности идет робот-погрузчик, но аргонодуговая и точечная сварки — на первом месте.
Никакая ручная сварка не сравнится по качеству шва и по степени контроля за процессом со специализированным роботом. Что и говорить о лазерной сварке, где с расстояния до 2 метров сфокусированным лазером технологический процесс осуществляется с точностью до 0,2 мм — это просто незаменимо в авиастроении и медицине. Прибавьте сюда интеграцию с CAD/CAM цифровыми системами.
Робот-сварщик имеет три главных действующих узла: рабочий орган, ЭВМ управляющую рабочим органом и память. Рабочий орган оснащен захватом, похожим на кисть руки. Орган имеет свободу перемещения по трем осям (X, Y, Z), а сам захват способен вращаться вокруг этих осей. Робот и сам может перемешаться по направляющим.

Промышленные роботы для автоматической загрузки и выгрузки изделий
Ни одно современное производство не обойдется без выгрузки и погрузки, независимо от габаритов и веса изделий. Робот самостоятельно установит заготовку в станок, а после — выгрузит и уложит. Один робот способен взаимодействовать сразу с несколькими станками. Конечно, нельзя не упомянуть в этом контексте погрузку багажа в аэропорту.
Роботы уже сейчас позволяют минимизировать затраты на содержание персонала. Речь не только о таких простых функциях, как работа штампом или оперировании печью. Роботы способны поднимать больший вес, в гораздо более тяжелых условиях, при этом не уставая и затрачивая существенно меньше времени, чем потребовалось бы живому человеку.
На литейном и кузнечном производствах, к примеру, условия традиционно очень тяжелы для людей. Данного рода производства находятся на третьем месте после выгрузки-загрузки по объему роботизации. Не даром уже сейчас практически все европейские литейные цеха оснащены автоматизированными системами с промышленными роботами. Стоимость внедрения робота обходится предприятию в сотню тысяч долларов, но в распоряжении появляется весьма гибкий комплекс, окупаемый с лихвой.
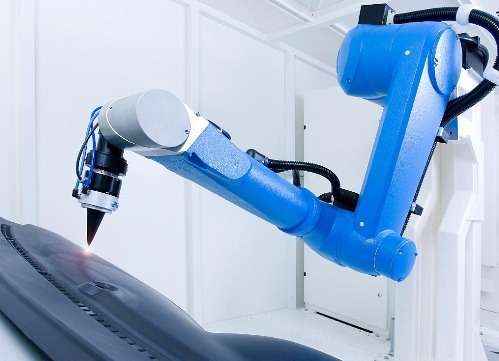
Промышленные роботы для лазерной и плазменной резки
Роботизированные лазерная и плазменная резки позволяют улучшить традиционные линии с плазменными горелками. Трехмерная резка и раскрой уголков и двутавров, подготовка для дальнейшей обработки, сварки, сверления. В автомобилестроении данная технология просто незаменима, ибо края изделий необходимо точно и быстро обрезать после штамповки и формовки.
Один такой робот может совмещать в себе и сварку, и резку. Производительность повышается внедрением гидроабразивной резки, исключающей ненужное тепловое воздействие на материал. Таким образом за две с половиной минуты вырезаются все мелкие отверстия в металле кузовов Renault Espace на роботизированном заводе Renault во Франции.
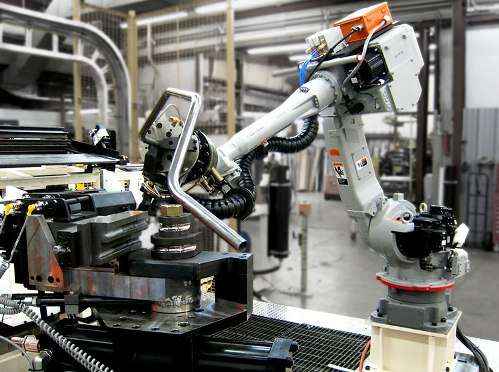
Промышленные роботы для гибки труб
На производствах мебели, автомобилей и прочих изделий полезна роботизированная гибка труб с участием рабочей головки, когда труба позиционируется роботом и сгибается очень быстро. Такая труба может быть уже оснащена различными элементами, что не помешает процессу бездорновой гибки роботом.

Промышленные роботы для сверления изделий
Обработка краев, сверление отверстий, а также фрезеровка — что может быть проще для робота, идет ли речь о металле, древесине или пластмассе. Точные и прочные манипуляторы справляются с данными задачами на ура. Рабочая зона не ограничена, достаточно установить протяженную ось, либо несколько управляемых осей, что даст превосходную гибкость плюс высокую скорость. Человек так не сможет.
Частоты вращения фрезеровочного инструмента достигают здесь десятков тысяч оборотов в минуту, а шлифовка швов и вовсе превращается в череду простых повторяемых движений. А ведь раньше шлифовка и абразивная обработка поверхностей считались чем-то грязным и тяжелым, к тому же очень вредным. Сейчас паста подается автоматически во время обработки войлочным кругом после прохождения абразивной ленты. Быстро и безвредно для оператора.
Перспективы промышленной робототехники огромны, ведь роботы принципиально могут быть внедрены практически в любые процессы производств, причем в неограниченном количестве. Качество автоматической работы порой настолько высоко, что для человеческих рук просто недостижимо. Есть целые крупные отрасли, где ошибки и погрешности недопустимы: авиастроение, точная медицинская техника, сверхточное оружие и т. д. Не говоря уже о повышении конкурентоспособности отдельных предприятий и о положительном эффекте на их экономику.
Если у вас возникли сложности с курсовой, контрольной, дипломной, рефератом, отчетом по практике, научно-исследовательской и любой другой работой - мы готовы помочь.


СОДЕРЖАНИЕ
\t "Штиль1;1" 1. ОСНОВНЫЕ ПОНЯТИЯ
2. ПРОМЫШЛЕННЫЕ РОБОТЫ
3. РОБОТ CKBOT
4. РОБОТЫ AQUAJELLY И AIRJELLY
5. РОБОТ TETWALKER
ПЕРЕЧЕНЬ ССЫЛОК
1. ОСНОВНЫЕ ПОНЯТИЯ
Робот (от чешск. robota) — автоматическое устройство с антропоморфным действием, которое частично или полностью заменяет человека при выполнении работ в опасных для жизни условиях или при относительной недоступности объекта.
Робот может управляться оператором либо работать по заранее составленной программе. Использование роботов позволяет облегчить или вовсе заменить человеческий труд на производстве, в строительстве, при работе с тяжёлыми грузами, вредными материалами, а также в других тяжёлых или небезопасных для человека условиях.
Промышленный робот — автономное устройство, состоящее из механического манипулятора и перепрограммируемой системы управления, которое применяется для перемещения объектов в пространстве в различных производственных процессах.
Промышленные роботы являются важными компонентами автоматизированных гибких производственных систем (ГПС), которые позволяют увеличить производительность труда.
Бытовые роботы
Производители роботов
Известные коммерческие модели роботов
· Aibo
· ASIMO
· i-SOBOT
· REEM-B
· SCORBOT-ER 4u
· STAIR
· Twendy-One
· Wakamaru
2. ПРОМЫШЛЕННЫЕ РОБОТЫ
История
Функциональная схема промышленного робота
В составе робота есть механическая часть и система управления этой механической частью, которая в свою очередь получает сигналы от сенсорной части. Механическая часть робота делится на манипуляционную систему и систему передвижения.
Манипуляторы
Система передвижения. Внутри помещений, на промышленных объектах используются передвижения вдоль монорельсов, по напольной колее и т. д.
Управление
Управление бывает нескольких типов:
1. Программное управление — самый простой тип системы управления, используется для управления манипуляторами на промышленных объектах. В таких роботах отсутствует сенсорная часть, все действия жёстко фиксированы и регулярно повторяются. Для программирования таких роботов могут применяться среды программирования типа VxWorks/Eclipse или языки программирования например Forth, Оберон, Компонентный Паскаль, Си. В качестве аппаратного обеспечения обычно используются промышленные компьютеры в мобильном исполнении PC/104 реже MicroPC. Может происходить с помощью ПК или программируемого логического контроллера.
2. Адаптивное управление — роботы с адаптивной системой управления оснащены сенсорной частью. Сигналы, передаваемые датчиками, анализируются и в зависимости от результатов принимается решение о дальнейших действиях, переходе к следующей стадии действий и т. д.
3. Основанное на методах искусственного интеллекта.
4. Управление человеком (например, дистанционное управление).
Принципы управления
Современные роботы функционируют на основе принципов обратной связи, подчинённого управления и иерархичности системы управления роботом.
Иерархия системы управления роботом подразумевает деление системы управления на горизонтальные слои, управляющие общим поведением робота, расчётом необходимой траектории движения манипулятора, поведением отдельных его приводов, и слои, непосредственно осуществляющие управление двигателями приводов.
Подчинённое управление
Подчинённое управление служит для построения системы управления приводом. Если необходимо построить систему управления приводом по положению (например, по углу поворота звена манипулятора), то система управления замыкается обратной связью по положению, а внутри системы управления по положению функционирует система управления по скорости со своей обратной связью по скорости, внутри которой существует контур управления по току со своей обратной связью.
Современный робот оснащён не только обратными связями по положению, скорости и ускорениям звеньев. При захвате деталей робот должен знать, удачно ли он захватил деталь. Если деталь хрупкая или её поверхность имеет высокую степень чистоты, строятся сложные системы с обратной связью по усилию, позволяющие роботу схватывать деталь, не повреждая её поверхность и не разрушая её.
Управление роботом может осуществляться как человеком-оператором, так и системой управления промышленным предприятием (ERP-системой), согласующими действия робота с готовностью заготовок и станков с числовым программным управлением к выполнению технологических операций.
Действия промышленного робота
Среди самых распространённых действий, совершаемых промышленными роботами можно назвать следующие:
· перемещение деталей и заготовок от станка к станку или от станка к системам сменных палет;
· сварка швов и точечная сварка;
· покраска;
· выполнение операций резанья с движением инструмента по сложной траектории.
Промышленный робот является устройством, производящим некие манипулятивные функции, схожие с функциями руки человека.
Достоинства использования


Робототехника в современном мире

Автор работы награжден дипломом победителя III степени
Текст работы размещён без изображений и формул.
Полная версия работы доступна во вкладке "Файлы работы" в формате PDF
Робототе́хника (от робот и техника ; англ. robotics — роботика , роботехника ) — прикладная наука , занимающаяся разработкой автоматизированных технических систем и являющаяся важнейшей технической основой развития производства.
Робототехника опирается на такие дисциплины:
Выделяют строительную, промышленную, бытовую, медицинскую, авиационную и экстремальную (военную, космическую, подводную) робототехнику.(Википедия)
В робототехнике соединяются механика, система управления и искусственный интеллект, поэтому она является важнейшим направлением научно-технического прогресса. Робототехнику требуются знания в вышеперечисленных дисциплинах, в результате робототехник, в отличие от узкого специалиста, обладает широким кругозором и системным мышлением.
Робот – устройство, управляемое с помощью электронной платы или компьютера, который можно запрограммировать на выполнение определенных операций. Он является электромеханическим, гидравлическим, пневматическим устройством или их сочетанием, в зависимости от сферы применения, предназначенный для замены человека или облегчения его труда.
Управление роботами делится на:
телеуправление – то есть с участием человека;
Существует три класса устройств робототехники, это сборные устройства, манипуляторы и уже готовые работы.
Системы управления робототехнических устройств строятся на том же техническом базисе, что и все другие автоматические устройства. В отличие от автоматов робот не просто следует заранее вложенному в него алгоритму, а способен воспринимать внешние сигналы и в соответствии с ними адаптировать свои действия в изменяющейся ситуации. Важно понимать, что на данный момент ещё нет универсальных роботов, которых можно было бы использовать для любой задачи. Инженеры-изобретатели разрабатывают и программируют роботов отдельно для каждой конкретной задачи.
По уровню применения робототехника подразделяется на:
Игровая робототехника может быть предназначена для детей и для взрослых. Игровая робототехника для детей направлена на выработку у них интереса к программированию и инженерным наукам. Игровая робототехника может быть полезна и для взрослых, так как её применение может способствовать выработке навыков поведения в типичных жизненных и опасных ситуациях.
В рамках обучающей робототехники используются робототехнические комплекты для детских, учебных и досуговых центров на базе Huna, Lego, Fishertechnik, Arduino. Например, компания LEGO выпустила первый робототехнический конструктор в рамках новой линейки конструкторов MINDSTORMS в 1998 году, открывая детям дверцу в волшебный мир роботов.
Актуальность темы.
В 21веке робототехника используется во всех видах промышленности, строительства, быта, авиации, особенно в экстремальных сферах деятельности человечества таких, как военная, космическая и подводная.
Цель реферата.
Целью реферата является рассмотрение видов и типов роботов, а также сферы их использования в современном мире.
Строительная робототехника.
Строительная робототехника, как это понятно из её названия, связана со сферой строительства. То есть работа идёт над разработкой роботов, которых можно будет использовать как при строительстве различных объектов, так и, что интересно, при их разрушении. Трудоёмкость обоих этих процессов высока, да и технологичность каждой операции процесса строительства должна быть на должном уровне. Поэтому использование роботов в этой сфере поможет соблюдать установленные технические стандарты и требования, а также может помочь максимально исключить ошибки, допускаемые из-за человеческого фактора.
Промышленная робототехника.
Промышленные роботы уже активно используются на заводах и фабриках, при производстве игрушек, чайников, мотоциклов, конфет, а также в производстве действительно сложных изделий, например, автомобилей. Роботы могут без помощи человека варить металл, штамповать, собирать по частям готовые продукты, всё это происходит благодаря особым конструкциям и программам, которые определяют функционал каждого робота. Говоря иными, а именно научными словами, такие устройства предназначены для автоматизации производства — изготовления чего-либо без помощи человека.
Бытовая робототехника.
Роботы для использования в домохозяйствах, включая персональных роботов, как правило, узкоспециализированные - каждый под какой-то один вид деятельности. В перспективе можно ожидать появления многофункциональных, универсальных роботов, способных выполнять различные виды деятельности. Жаргонное название - "домашники". Отличаются многообразием видов, в зависимости от назначения. Они могут быть: помощниками для пожилых людей, дворецкими, кухонными работниками, охранниками и т.д.
В данное время всё усиливается спрос на умные дома, они позволяют быстро реконфигурировать одно и то же помещение в соответствие с текущими задачами в режиме реального времени. Электроприводы, повинующиеся заложенной программе или нажатию кнопок в приложении, выдвигают из недр робо-комплекса кроватили или столы, настраивают конфигурацию шкафов и полок. А в роботизированном доме даже перегородки между комнатами могут передвигаться так, как нужно сейчас хозяину. Как в ручном режиме, так и автоматически, например, в таком доме занавески раздвинутся как раз тогда, когда хозяин встает, одновременно включится, например, кофеварка.
Медицинская робототехника.
Главной целью развития медицинской робототехники является высокая точность и повышение эффективности лечения, уменьшение рисков нанесения вреда здоровью человека. В настоящее время роботы играют колоссальную роль в развитии современной медицины. Они способствуют точной работе при операциях, помогают провести диагностику и поставить правильный диагноз. Заменяют отсутствующие конечности и органы, восстанавливают и улучшают физические возможности человека, снижают время на госпитализацию, обеспечивают удобство, быстроту реагирования и комфорт, экономят финансовые затраты на обслуживание. Вот некоторые роботы применяемые в медицине: роботы хирурги, роботизированные протезы, нанороботы и многие другие медицинские роботы.
Авиационная робототехника.
Авиация в плане роботизации не отстаёт от других сфер деятельности человека.
В нынешнее время очень популярным являются беспилотные летательные аппараты (БПЛА). БПЛА - беспилотный летательный аппарат военного назначения, разновидность военного робота. В задачу этих автономных систем, созданных для полёта, входит выполнение миссий, потенциально опасных для человека.
Также в авиации широко используются промышленные роботы, задействованные в производстве, обслуживании и ремонте самолётов.
Военная робототехника.
К группе военных роботов относят всевозможные беспилотные разведчики, машины для минирования и разминирования местности. Был разработан даже настоящий робот-медик. Называется этот робот Bloodhound, а предназначен он для оказания помощи раненым, к которым невозможно приблизиться врачам из-за сильного огня со стороны противника. Bloodhound оснащён видеокамерами, радиостанцией с микрофоном и динамиками, а также стетоскопом. Все эти элементы робота позволяют медикам дистанционно управлять им, проводить первичный осмотр раненого и даже беседовать с ним. После постановки диагноза Bloodhound может остановить кровотечение (например, наложить повязку на рану) и сделать назначенный укол, который позволит раненому дождаться эвакуации. Благодаря таким роботам можно спасти огромное количество человеческих жизней.
В 2004 российские инженеры создали робота, способного обнаруживать и обезвреживать взрывные устройства. Такой робот способен проникать и доставлять в труднодоступные зоны средства наблюдения и разведки, а также осматривать подозрительные объекты и в случае необходимости осуществлять их транспортировку до места назначения или разминирование. Робот может работать индивидуально или в группе таких же машин.
Космическая робототехника.
Космороботы – это роботы, приспособленные работать в космическом пространстве. Преимущество космических роботов перед человеком заключается в том, что они могут работать в крайне неблагоприятных условиях и обходиться без каких-либо ресурсов, так как в большинстве случаев они работают на солнечных батареях. Также гораздо легче будет пережить потерю такого робота, чем гибель астронавта. Обычно, задача косморобота заключается в проведении какой-нибудь научной деятельности. Вообще-то, тоже самое может сделать и обычный робот, работающий на земной поверхности, но к космороботу есть несколько основных требований, которым он должен соответствовать.
функционировать в сложных условиях враждебной среды;
весить как можно меньше;
потреблять мало энергии и иметь долгий срок службы;
работать в автоматическом режиме;
обладать чрезвычайной надежностью;
Для того, чтобы соответствовать всем этим требованиям, учёные создают все новые и новые устройства, механизмы, приводы, микроконтроллеры, обладающие высокой прочностью и использующим как можно меньше энергии. Эксперты подсчитали, что отправление на Марс человека будет стоить примерно 200-300 миллиардов долларов, при том, что это будет безвозвратное отправление. Еще придется потратить несколько месяцев на психологическую адаптацию участников экспедиции. А отправка корабля, на борту которого будет робот, обойдется примерно в 5-10 миллиардов долларов. Так что роботы в космосе обходятся намного дешевле, чем люди.
Подводная робототехника.
В современной жизни человек уже использует роботов во всех сферах своей деятельности. В большинстве своём роботы являются не заменимыми помощниками, но всё чаще они используются там, где человек справлялся без особого труда. Благодаря своему интеллекту человек развил науку, и смог создать робототехнику, но из-за своей лени он всё чаще стремится заменить свой труд роботами. Но и этого человеку мало, теперь человек пытается создать, для своих роботов, искусственный интеллект. С искусственным интеллектом роботы смогут самостоятельно оценивать происходящее вокруг них и принимать решения по действиям, которые им необходимо произвести. Человеку не надо уже будет тратить силы и время на подачу необходимых команд и алгоритмов. Но такое положение дел может привести к деградации человечества, а возможно и исчезновения, как вида, с лица земли. Вполне возможно, что великие достижения человеческого разума и человеческая лень, могут обернуться против самого человека.
Прейко М., Устройства управления роботами: схемотехника и программирование – М.: Издательство ДМК, 2004, 202с.
Читайте также:
- 7 чудес света реферат на казахском языке
- Медицинское страхование в днр реферат
- Изменение женского образа в американской рекламе хх века реферат
- Определение рефлексии в психолого педагогической практике реферат
- Правовые основы системы управления персоналом государственной и муниципальной службы реферат