
Регулирование частоты и мощности в энергосистемах реферат
Обновлено: 04.07.2024
Электроэнергия, вырабатываемая на электрических станциях в ЭЭС, тут же потребляется нагрузками и расходуется на потери при ее передаче [1]. Говорят, что имеет место одновременность процессов выработки и потребления электроэнергии.
Суммарная активная мощность генерации в ЭЭС ΣРг в каждый момент времени равна потребляемой мощности ΣРп. То же самое можно сказать относительно реактивных мощностей ΣQг и ΣQп:
ΣРг = ΣРп = ΣРн + ΣРсн + ΣΔР, (5.1)
ΣQг = ΣQп = ΣQн + ΣQсн + ΣΔQ – ΣQс, (5.2)
где ΣРп и ΣQн –суммарные активная и реактивная мощности нагрузок ЭЭС; ΣРсн и ΣQсн – суммарные активная и реактивная мощности собственных нужд электростанций; ΣΔР и ΣΔQ – суммарные активные и реактивные потери мощности в ЭЭС; ΣQс – суммарная зарядная мощность ЛЭП.
Уравнения (5.1) и (5.2) представляют так называемый баланс мощностей, который является составной частью баланса мощности в ЭЭС, учитывающего выработку не только электрической энергии, но и тепла.
Баланс мощностей в ЭЭС отвечает определенным значениям частоты и напряжения. Таким образом, баланс мощностей сохраняется всегда, но в случае, если значения частоты и напряжения отличаются от своих номинальных значений, говорят, что имеет место дефицит или избыток мощностей.
Частота и напряжения в ЭЭС не могут оставаться постоянными, так как потребление активной и реактивной мощностей непрерывно изменяется. Нормальное отклонение частоты переменного тока в ЭЭС в соответствии с ГОСТ составляет ±0,2 Гц, а предельно допустимое ±0,4 Гц, допустимое отклонение напряжения на выводах электроприемников составляет ±10%.
Верны следующие утверждения:
- при снижении генерируемых мощностей в системе происходит изменение как частоты, так и напряжения;
- снижение генерируемой активной мощности приводит к уменьшению и частоты, и напряжения;
- снижение генерируемой реактивной мощности приводит к уменьшению напряжения и незначительному повышению частоты.
Физически повышение частоты при снижении генерируемой реактивной мощности можно объяснить снижением потерь активной мощности в сети, что приводит к уменьшению потребляемой активной мощности в ЭЭС. Аналогичные выводы можно сделать и для положительных изменений генерируемых мощностей.
В результате можно установить, какие воздействия на режим ЭЭС следует предпринять, чтобы осуществить регулирование частоты и напряжения. Так, регулирование частоты достигается за счет изменения генерируемой активной мощности путем изменения пуска энергоносителя (пара или воды) в турбину. Так как величина генерируемой активной мощности определяется требованиями по частоте, то для регулирования напряжения используется изменение реактивной мощности, что в свою очередь требует регулирования тока возбуждения синхронного генератора.
Следует отметить, что частота в ЭЭС одинакова во всех ее точках (рассматриваются только установившиеся режимы), а напряжения различны во всех узлах сети, поэтому, говоря о регулировании напряжения, надо иметь в виду какой-либо один определенный узел или группу узлов, в которых требуется одновременно изменять напряжение (увеличивать или уменьшать).
5.1.2 Характеристики первичных двигателей электростанций
Мощности потребителей меняются в каждый момент времени, причем изменения могут проходить медленно или скачками [1].
Медленные изменения проявляются изо дня в день почти одинаково, следовательно, их можно прогнозировать. На них накладываются резкие быстрые изменения, носящие, как правило, случайный характер. Причиной резких изменений мощностей являются отключения генераторов, отключения и включения нагрузок, а также включения и отключения элементов электрической сети.
В случае резкого повышения или резкого сброса нагрузки мгновенный небаланс мощности компенсируется кинетической энергией, обусловленной инерцией вращающихся машин (генераторов, двигателей). Это вызывает понижение (или повышение) частоты. Для устранения отклонения частоты необходимо восстановить равновесие между генерацией и потреблением мощности, что достигается изменением мощности турбины с помощью регулирования пуска в нее энергоносителя.
Рассмотрим характеристики первичных двигателей – тепловых и гидравлических турбин, определяющих изменение их мощности под действием систем регулирования. На рисунке 5.1 показана схема преобразования энергии пара или воды в электрическую энергию.
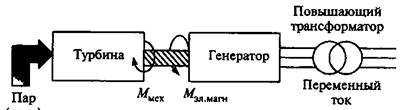
Рисунок 5.1 Схема преобразования энергии
В установившемся режиме имеет место равновесие моментов сил на валу турбо- или гидрогенератора: Ммех = Мэл. магн. Мощность, развиваемая турбиной, передается генератору: Рт = Ргпри определенной скорости вращения турбины Ω.Мощность турбины зависит от механического момента: Рт = Ммех Ω,а мощность генератора – от тока статора генератора: Рг = √3 UгIгcosφ.
Снижение нагрузки в ЭЭС приведет к уменьшению тока в обмотках статора генератора и снижению электромагнитного момента на валу ротора. Механический момент окажется больше электромагнитного момента, и под воздействием избыточного механического момента скорость вращения ротора начнет увеличиваться.
В случае нерегулируемой турбины ее мощность Ртостается неизменной и с увеличением скорости момент Ммех будет снижаться до значения, которое даст новое равновесие моментов сил. При этом скорость вращения турбины, а следовательно и частота тока генератора, увеличится.
В случае регулируемой турбины увеличение ее скорости вращения приведет в действие автоматический регулятор скорости (АPC), который обеспечит уменьшение подачи энергоносителя (пара или воды) в турбину, с тем чтобы сохранить постоянной скорость вращения ротора генератора.
Принцип работы АРС основан на обратной отрицательной связи (ООС) системы регулирования: при повышении регулируемого параметра система уменьшает, а при снижении увеличивает подачу энергоносителя.
Если после изменения нагрузки и окончания переходного процесса АРС восстанавливает прежнюю скорость, регулирование называется астатическим. Если же устанавливается скорость, отличная от прежней, то регулирование называется статическим, и система регулирования также называется статической. Характеристику АРС турбины часто представляют в координатах скорости и мощности генератора (рисунок 5.2).
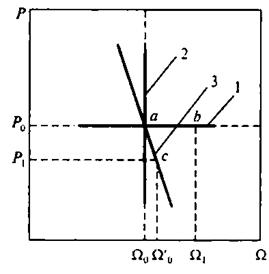
Рисунок 5.2 Характеристика АРС
В случае нерегулируемой турбины мощность Р0 остается постоянной, а меняется только скорость (прямая 1 – рабочая точка исходного режима а, нового режима b). В случае астатического регулирования, наоборот, скорость вращения турбины поддерживается постоянной, при этом мощность регулируется пуском энергоносителя (прямая 2). При статизме регулятора характеристика наклонена к оси абсцисс (прямая 3) и при изменении нагрузки ЭЭС скорость не восстанавливается до прежнего значения (рабочая точка с). Новая скорость тем сильнее отличается от первоначальной, чем больше статизм системы регулирования, т.е. чем больше угол между характеристикой АРС и осью ординат.
5.1.3 Первичное и вторичное регулирование частоты
Процесс регулирования частоты в этой системе генератор - потребитель можно проследить с помощью графиков, отражающих зависимость мощности турбины от частоты переменного тока на шинах синхронного генератора (рисунок 5.3) [1]. В этих координатах характеристика АРС турбины 1 будет выглядеть точно так же, как на рисунке 5.2, поскольку частота переменной ЭДС синхронного генератора пропорциональна скорости вращения.
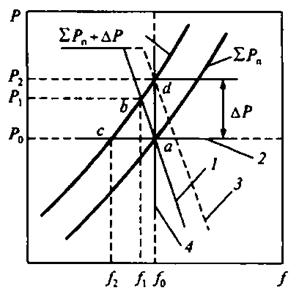
Рисунок 5.3 Первичное и вторичное регулирование частоты
При больших снижениях скорости (а, следовательно, и частоты) АРС полностью открывает направляющий аппарат турбины. При этом турбина развивает номинальную мощность. Дальнейшее изменение ее при снижении скорости становится невозможным. На рисунке 5.3 такому режиму работы отвечает горизонтальный участок характеристики 1.
На рисунке 5.3 изображена статическая характеристика активной мощности потребления ЭЭС по частоте ΣРп = φп(f). Пересечение характеристик АРС и ЭЭС является рабочей точкой (а) исходного режима с частотой f0. Будем считать, что в этом режиме частота в ЭЭС равна номинальной, т.е. f0 = 50 Гц. Мощность исходного режима обозначим Р0.
Пусть теперь в ЭЭС происходит наброс потребляемой мощности на величину ΔР. Новой нагрузке отвечает статическая характеристика ΣРп + ΔР, расположенная выше характеристики ΣРп. Значение частоты f1, отвечающей режиму увеличенного потребления мощности, вновь определяется пересечением характеристики АРС 1 с новой статической характеристикой потребления (рабочая точка b). Из рисунка видно, что f1 Р0.
При статической характеристике 1, показанной на рисунке 5.3, АРС турбины не восстанавливает частоту до прежнего значения, однако уменьшает отклонение частоты от номинального значения. При отсутствии АРС частота снизилась бы до значения f2 (точка с на прямой 2, f2 + pacпи недовозбуждения Q - pacп.
В режиме недовозбуждения генератор потребляет реактивную мощность из сети. В этом режиме при снижении тока возбуждении возможно нарушение статической устойчивости генератора. Кроме того, у турбогенератора вследствие изменения взаимодействия магнитных полей статора и ротора значительно нагреваются торцевые зоны статора, что ограничивает минимально возможную величину тока возбуждения. Для гидрогенераторов при низких токах возбуждения и режимов, близких к холостому ходу, возможен режим самовозбуждения из-за резонансных явлений, связанных с обменом энергией магнитного поля гидрогенератора и электрического поля высоковольтных линий, присоединенных к электростанции. Все перечисленное, так или иначе, определяет нижнюю границу тока возбуждения генератора и располагаемой реактивной мощности генератора в режиме недовозбуждения – ограничение минимального возбуждения (ОМВ).
5.1.7 Компенсирующие устройства.
В отличие от активной мощности реактивная мощность может вырабатываться не только на электростанциях, но и в других точках ЭЭС [1]. В этом случае ее источниками являются специальные устройства, которые называются компенсирующими (КУ). Размещение КУ вблизи электроприемников очень удобно для ЭЭС, так как в этом случае требуемая потребителям реактивная мощность не передается по сети, что связано с дополнительными ее потерями, а вырабатывается в тех точках, где непосредственно имеется дефицит этой мощности.
Компенсирующие устройства широко применяются также для регулирования напряжения в электрических сетях. Таким образом, их установка удовлетворяет трем непротиворечивым целям: обеспечению баланса реактивной мощности, снижению потерь в электрической сети и регулированию напряжения.
Существует несколько видов КУ.
Батареи конденсаторов(БК) представляют собой отдельные конденсаторы мощностью до 125 квар, собранные вместе путем последовательно-параллельного соединения.
Конденсаторные батареи, предназначенные для генерации реактивной мощности и, таким образом, повышения cosφ в узлах нагрузки и у потребителей, называются косинусными и включаются по шунтовой схеме, т.е. являются устройствами поперечной компенсации.
Шунтовые БК применяют на напряжение до 110 кВ. Отдельные конденсаторы рассчитаны на напряжение от 0,2 до 10,5 кВ, и включение БК на более высокое напряжение достигается увеличением числа последовательно включенных конденсаторов. Для повышения мощности батареи увеличивают число параллельно включенных ветвей.
Регулирование выдаваемой мощности батареи осуществляется включением и отключением части параллельных ветвей конденсаторной батареи.
Батареи конденсаторов обладают отрицательным регулирующим эффектом, т.е. при уменьшении напряжения в сети они снижают выдаваемую реактивную мощность, что приводит к еще большему снижению напряжения. Это является недостатком БК. К другим их недостаткам можно отнести ступенчатость регулирования мощности и сильную зависимость выдаваемой мощности от напряжения сети.
Преимуществом БК являются их малая стоимость и эксплуатационные расходы. Потери в БК достаточно малы, в удельном выражении они в несколько раз ниже, чем в других КУ. Кроме того, допускается большая свобода при выборе мест установки батарей. Установленная мощность БК может изменяться в диапазоне от 25. 50 квар (самые мелкие установки в городских и сельских сетях напряжением 380 В) до 25 Мвар и более (крупные батареи, установленные на высоковольтных подстанциях). Батареи конденсаторов могут присоединяться к любой точке электрической сети, что позволяет размещать их непосредственно у мест потребления реактивной мощности, например в цехах промышленных предприятий, распределительных пунктах и даже внутри некоторых электроприемников (газоразрядные светильники).
Синхронные компенсаторы (СК) представляют собой синхронный двигатель, работающий на холостом ходу. Ротор СК изготовляется облегченным по сравнению с генератором или двигателем.
В режиме перевозбуждения СК работает как генератор реактивной мощности и выдает ее в сеть. Нагрузка сети имеет индуктивный характер и потребляет мощность, выдаваемую СК. В режиме недовозбуждения СК потребляет реактивную мощность (забирает ее из сети).
Синхронные компенсаторы устанавливаются на крупных подстанциях с напряжением 220 кВ и выше и присоединяются к обмотке низкого напряжения автотрансформаторов. Иногда СК ставятся на удаленных от источников энергии подстанциях, питаемых по загруженным ЛЭП.
Достоинствами СК являются плавное регулирование реактивном мощности, возможность увеличения выдаваемой реактивной мощности при понижении напряжения, что соответствует положительному регулирующему эффекту такой нагрузки, а также возможность как выдачи, так и потребления реактивной мощности, т.е. широкий диапазон регулирования. К недостаткам следует отнести их высокую стоимость и эксплуатационные расходы, а также повышенные по отношению к другим КУ потери мощности.
Синхронные двигатели(СД), установленные у потребителей, могут быть использованы как источники реактивной мощности, они имеют номинальный опережающий cosφ = 0,9 и, работая в поминальном режиме, выдают реактивную мощность.
Хотя СД дороже асинхронных двигателей, все же они выгоднее, чем асинхронные двигатели, применяемые совместно с КУ.
Шунтирующие реакторы(ШР) представляют собой катушки индуктивности, рассчитанные на высокое напряжение, и в противоположность БК потребляют реактивную мощность из сети, т.е. являются потребителями реактивной мощности. Однако ШР также можно считать компенсирующими устройствами, так как они предназначены для компенсации зарядной мощности ЛЭП высокого и сверхвысокого напряжений.
Статические тиристорные компенсаторы(СТК) представляют собой трехфазный выпрямительный блок, нагрузкой которого является реактор. Энергия магнитного поля реактора используется для генерирования реактивной мощности путем направления запасенной в реакторе энергии в ту фазу и те моменты времени, когда ток в этой фазе опережает напряжение.
Рис. 4.3. Статические характеристики потребления активной и реактивной мощности по частоте (я) и по напряжению (б) (в относительных единицах) Коэффициенты Яу, аи, bj иЬц называются регулирующими эффектами нагрузки по частоте и напряжению. Чем больше величина этих коэффициентов, тем больше угол наклона линеаризованных зависимостей к оси абсцисс и тем сильнее реакция активной и реактивной мощности… Читать ещё >
Баланс мощностей и регулирование частоты в ээс ( реферат , курсовая , диплом , контрольная )
БАЛАНС АКТИВНЫХ И РЕАКТИВНЫХ МОЩНОСТЕЙ В ЭНЕРГОСИСТЕМЕ
Электроэнергия, вырабатываемая на электрических станциях в ЭЭС за сколь угодно малый ощутимый для человека промежуток времени, тут же потребляется нагрузками и расходуется па потери при ее передаче. Говорят, что имеет место одновременность процессов выработки и потребления электроэнергии. Упрощенно ЭЭС можно представить в виде совокупности п генераторов электростанций, т нагрузок потребителей и электрической сети, связывающей между собой генераторы и нагрузки посредством ЛЭП и трансформаторов (рис. 4.1). При этом генераторы в ЭЭС работают параллельно и их суммарная мощность генерации XPv в каждый момент времени равна потребляемой мощности Y.Pn ЭЭС. То же самое можно сказать и для реактивной мощности ZQr и 'LQT:

где !/(, и Х?н — суммарные активная и реактивная мощности нагрузок ЭЭС; Х/^н и Х?)сн — суммарные активная и реактивная мощности собственных нужд электростанций; ХДР и I.AO — суммарные активные и реактивные потери мощности в ЭЭС; I.QC — суммарная зарядная мощность ЛЭП.

Рис. 4.1. Упрощенная модель ЭЭС.
Уравнения (4.1) и (4.2) представляют так называемый баланс мощностей ЭЭС.
Рассмотрим эквивалентную схему ЭЭС, где эквивалентный генератор вырабатывает суммарную мощность энергосистемы XPV + j’LQv, передаваемую на приемные шины, с которых питаются.

Рис. 4.2. Эквивалентная схема ЭЭС.
все нагрузки ЭЭС посредством электрических сетей, включая мощности собственных нужд электростанций (рис. 4.2). В простейшем случае в этой схеме может быть установлен один реальный генератор, который питает некоторую нагрузку, расположенную в непосредственной близости от генератора.
В установившемся режиме мощности нагрузки представляются их статическими характеристиками по частоте / и напряжению U:

Суммарные мощности потребления в ЭЭС также зависят от / и U:

Следовательно, баланс мощностей в ЭЭС отвечает определенным значениям частоты и напряжения.
Частота и напряжения в ЭЭС нс могут оставаться постоянными, так как потребление активной и реактивной мощности непрерывно изменяется. ГОСТ-32 144−2013 определяет требования к показателям качества электрической энергии, среди которых основными являются отклонения частоты от номинальной Дf и отрицательное 8Ц_) и положительное 8t/(+) отклонения напряжения:

где fm — измеренное значение основной частоты напряжения, Гц;
U,"(+) ~ измеренные значения напряжения, меньшие U0 и большие Uq соответственно, кВ; U0 — напряжение, равное стандартному номинальному напряжению /Уном или согласованному напряжению Uc, кВ.
В соответствии с ГОСТ измеренное значение отклонения частоты в так называемых синхронизированных системах электроснабжения не должно превышать ±0,2 Гц в течение 95% времени интервала измерения и ±0,4 Гц в течение 100% времени интервала измерения. Для контроля отклонения частоты обычно берется интервал длительностью в одну неделю.
В отличие от частоты, которая в установившемся режиме одинакова во всех частях энергосистемы, к отклонениям напряжения предъявляются разные требования в зависимости от расположения точки, в которой они измеряются. В общем случае согласно государственному стандарту, отрицательное и положительное отклонения напряжения в точке передачи электрической энергии [2] не должны превышать 10% номинального или согласованного значения напряжения. Допустимые значения положительного и отрицательного отклонений напряжения в точках общего присоединения должны быть установлены сетевой организацией с учетом необходимости выполнения норм ГОСТ-32 144−2013 в точках передачи электрической энергии.
С учетом (4.4) баланс мощностей (4.1) и (4.2) можно переписать так:

Обозначим параметры некоторого исходного режима индексом 0 (ноль), тогда при каких либо малых отклонениях от исходного режима АРг = 1Рг-1 Р^ и AQr = 1СГ -2?г0 будут иметь место отклонения частоты и напряжения Af = f~fo и &U = U-U0. При этом уравнения (4.6) и (4.7) можно представить приближенными линеаризованными зависимостями между отклонениями параметров (разложение в ряд Тейлора с сохранением только линейных членов):

в которых коэффициенты суть частные производные по частоте и напряжению:

Система уравнений (4.8) определяет связь приращений частоты и напряжения с изменениями генерируемой активной и реактивной мощности.
Обобщенные статические характеристики потребления активной и реактивной мощности для ЭЭС показаны на рис. 4.3.


Рис. 4.3. Статические характеристики потребления активной и реактивной мощности по частоте (я) и по напряжению (б) (в относительных единицах) Коэффициенты Яу, аи, bj иЬц называются регулирующими эффектами нагрузки по частоте и напряжению. Чем больше величина этих коэффициентов, тем больше угол наклона линеаризованных зависимостей к оси абсцисс и тем сильнее реакция активной и реактивной мощности на изменения частоты или напряжения:

где as, av, р f, pL: — углы касательных к оси абсцисс в точках /0 и U0 для соответствующих статических характеристик.
Решим систему уравнений (4.8), для этого перепишем ее в матричном виде.


Найдем матрицу, обратную к , и умножим на нее слева обе части уравнения (4.9). Определитель исходной матрицы.


есть положительная величина, так как а^Ьц> 0, а аиЬг

откуда следует, что уменьшение E/J приводит к снижению как частоты, так и напряжения.
Частота электрического тока является важным показателем качества электроэнергии. Частота электричества в единой энергосистеме России — 50 Гц.

Частота в энергосистеме России практически не меняется, а только отклоняется на тысячные доли. Это главным образом связано с тем, что частота в сети постоянно регулируется Системным оператором.
ОПРЧ — общее первичное регулирование частоты.
Под общим первичным регулированием частоты (ОПРЧ) понимается первичное регулирование, осуществляемое в меру имеющихся возможностей всеми электростанциями, в зависимости от характеристик регуляторов скорости турбин, заданных техническими правилами, при поддержке системами регулирования производительности котлов и реакторов и в соответствии с действующими нормативами. ОПРЧ имеет целью сохранение энергоснабжения потребителей и функционирования электростанций при аварийных отклонениях частоты.
НПРЧ — нормированное первичное регулирование частоты.
Под нормированным первичным регулированием частоты (НПРЧ) понимается часть первичного регулирования, осуществляемое в целях обеспечения гарантированного качества первичного регулирования и повышения надёжности энергообъединения выделенными электростанциями (энергоблоками) нормированного первичного регулирования, на которых запланированы и постоянно поддерживаются резервы первичного регулирования, обеспечено их эффективное использование в соответствии с заданными для НПРЧ характеристиками (параметрами) первичного регулирования. Гарантированное качество первичного регулирования в синхронной зоне должно обеспечить удержание текущих значений частоты в безопасных для энергоблоков АЭС и ГРЭС, а также потребителей (предотвращение срабатывания АЧР) пределах (50±0,8 Гц в динамике и 50±0,2 Гц в квазистатике) при возникновении расчётного аварийного небаланса мощности.
Вторичное регулирование частоты.
Под вторичным регулированием понимается процесс изменения активной мощности специально выделенных для этой цели электростанций для компенсации возникшего небаланса мощности, ликвидации перегрузки транзитных связей, для восстановления частоты и заданных внешних перетоков, и, как следствие, восстановления резервов первичной регулирующей мощности, потраченных при действии первичного регулирования.
Под региональным вторичным регулированием понимается вторичное регулирование для энергосистемы.
Под зональным вторичным регулированием понимается совместное вторичное регулирование, осуществляемое в зоне двух и более смежных энергосистем, на основе особого соглашения о взаимодействии при региональном и зональном регулировании, заключенного между энергосистемами.
Под общим вторичным регулированием в энергообъединении понимается регулирование одним регулятором, расположенным в одной из энергосистем или в зоне регулирования, параметра, общего для энергообъединения (частоты, суммарного внешнего перетока по интерфейсу Восток-Запад).
В нормальном режиме энергосистемы регулированию подлежат в основном отклонения частоты, обусловленные изменением состава и мощности потребителей. Эти изменения мощности в течении суток составляют 20–50%.
Для регулирования частоты турбины электростанций снабжают регуляторами скорости. Регулировочная способность турбины определяется характеристикой скорости. На рисунке 5.3 показана статическая характеристика регулятора скорости.
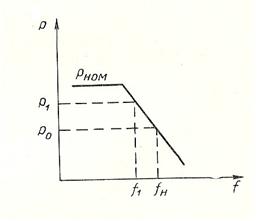
Принцип регулирования заключается в том, что при изменении частоты мощность турбины соответственно изменяется так, чтобы восстановить прежнюю частоту. Так, например, при снижении частоты с fн до f1 происходит автоматический набор нагрузки с Ро до Р1. При дальнейшем снижении частоты мощность генератора будет расти до тех пор, пока не станет равной номинальной Рном.
5.2.1 Первичное регулирование частоты.
Рассмотрим процесс регулирования частоты, построив на одном графике характеристику регулятора скорости турбины Р = f(f) и частотную статическую характеристику активной нагрузки потребителей Рн = f(f)(см.рисунок 5.2).
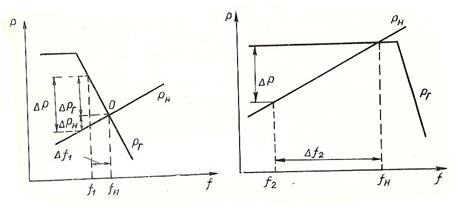
Рисунок 5.4 Рисунок 5.5
При номинальной частоте fн в точке (О) мощность нагрузки равна мощности генераторов: Рн = Рг. Пусть по какой-то причине (например, из-за уменьшения нагрузки одной из станций) частота уменьшилась на ∆f1 и стала равной f1. Тогда по статической характеристике Рн мощность нагрузки уменьшится на величину ∆Рн, а мощность генераторов увеличится на ∆Рг, и общий дефицит мощности составит
Процесс изменения мощностей генераторов и потребителей при отклонении частоты, стремящийся сохранить прежнее значение частоты, называют первичным регулированием. Отсюда следует важный практический вывод: при снижении частоты о полном дефиците мощностей нельзя судить только по увеличению мощности генераторов. Следует учитывать также изменение нагрузки потребителей по статическим характеристикам.
Если в момент снижения частоты на генераторах отсутствует резерв мощности, то такое же уменьшение генерирующей мощности ∆Р приведет к большему снижению частоты ∆f2 (рисунок 5.5). При полном использовании мощности станций первичное регулирование частоты происходит только за счет изменения мощности потребителей.
5.2.2 Вторичное регулирование частоты.
При выполнении регуляторов скорости турбин со статическими характеристиками первичное регулирование частоты не обеспечивает поддержание номинальной частоты в системе. Поэтому дополнительно применяют вторичное регулирование. Оно заключается в смещении характеристик регуляторов скорости турбин параллельно самим себе. Вторичное регулирование может осуществляться вручную или автоматически.
Рассмотрим совместный процесс первичного и вторичного регулирования частоты (см.рисунок 5.6).
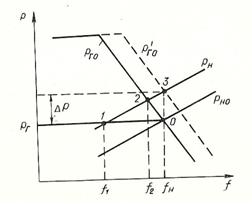
Известны усредненная характеристика регуляторов скорости генераторов системы Рго и статическая характеристика нагрузки Рно. В точке О соблюдается баланс активных мощностей при частоте fн. Если отсутствуют первичные регуляторы скорости, то при росте нагрузки потребителей мощность генераторов Рг остается неизменной и частота снизится до f1, а характеристика нагрузки переместится в точку 1 и займет положение Рн.
При включенных регуляторах скорости генераторы наберут часть нагрузки, и пересечение характеристик Рго и Рн окажется в точке 2, а частота станет f2, причем f1 ' ). В результате весь прирост нагрузки ∆Р примут на себя генераторы станций.
Для выполнения вторичного регулирования частоты в системе обычно выделяют одну или несколько станций, а все остальные поддерживают постоянную нагрузку и участвуют только в процессе первичного регулирования частоты.
Читайте также: