
Реферат регулирование частоты вращения
Обновлено: 04.07.2024
ного тока на примере электродвигателя с независимым ( параллельным ) возбуждением.
Уравнение естественной механической характеристики двигателя имеет вид
где ω – угловая скорость якоря;
U – напряжение на обмотке якоря;
.k – постоянный коэффициент;
Ф – магнитный проток обмотки ( обмоток ) возбуждения;
М – электромагнитный момент электродвигателя;
R- cопротивление обмотки якоря электродвигателя.
Из уравнения следует, что скорость двигателей с независимым ( параллельным )
возбуждением можно регулировать тремя способами:
1. изменением напряжения на обмотке якоря двигателя U;
2 изменением сопротивления цепи обмотки якоря R;
3. изменением магнитного потока полюсов Ф.
Первый способ регулирования – изменением напряжения на обмотке якоря, приме
Второй способ – изменением сопротивления цепи обмотки якоря, на практике осуществляется путем введения добавочных резисторов последовательно с обмоткой якоря.
Этот способ позволяет изменить скорость двигателя только вниз от основной, при
чем с увеличением сопротивлений скорость двигателя уменьшается. Это объясняется уве-
личением падения напряжения в добавочных резисторах и уменьшением напряжения на зажимах якоря.
Положительное качество данного способа регулирования - его простота, т.к. он осуществляется путем введения ( выведения ) ступеней регулировочного реостата в цепь обмотки якоря двигателя.
Основным недостатком способа является большой расход энергии в добавочных
Этот способ применяется в электроприводах грузоподъемных механизмов и якор-
но-швартовных устройств на постоянном токе.
Третий способ – изменением магнитного потока полюсов, на практике осуществля-
ется путем введения добавочных резисторов последовательно с параллельной обмоткой возбуждения. При этом магнитный поток возбуждения уменьшается, а скорость якоря увеличивается.
Скорость двигателей, специально сконструированных для работы с регулируемым потоком, может превышать номинальную в три раза и более, скорость остальных двигате-
лей повышается на 10 - 20 %. Верхний предел скорости ограничен условиями коммута-
ции, механической прочности или нагревом двигателя.
Положительное качество данного способа регулирования - его экономичность,
т.к. расход электроэнергии в регулировочном резисторе мал из-за небольшого значения тока возбуждения в цепи параллельной обмотки.
Основными недостатками способа являются возможность регулирования скорости только вверх от номинальной, а также увеличение тока якоря во столько раз, во сколько раз ослаблен магнитный поток.
Последняя особенность не позволяет применять этот способ регулирования при ра-
боте электропривода с номинальным моментом, т.к. при ослаблении потока ток якоря пре
высит номинальный, что недопустимо.
Поэтому этот способ регулирования применяется в электроприводах грузоподъем-
ных механизмов и якорно-швартовных устройств для получения высоких скоростей при перемещения холостого гака ( грузовые лебедки и краны ) или швартовного каната ( бра-
шпили, шпили ), т.е. при небольшой нагрузке на валу электродвигателя.
Система Г-Д как минимум состоит из трех электрических машин:
1. исполнительного электродвигателя М2, приводящего в действие механизм;
2. генератора G1, питающего исполнительный ЭД;
3. приводного электродвигателя Ml, вращающего якоря генератора G1 и образую-
щего с ним так называемый преобразователь.
Машины М2 и G1 - постоянного тока с независимым возбуждением.
Несмотря на это, система Г-Д может применяться при любом роде тока питающей сети.
Если сеть постоянного тока, то в качестве приводного двигателя М1 применяют ЭД параллельного возбуждения, а обмотки возбуждения всех машин получают питание от сети.
Если сеть переменного тока, используют асинхронный приводной ЭД. Для питания обмоток возбуждения L1G1 и LM2 в этом случае применяют четвертую машину – возбуди
тель G2. Это небольшой генератор постоянного тока с самовозбуждением. Он приводится во вращение тем же приводным электродвигателем М1 , что и генератор G1 ( рис. 9.3 ).
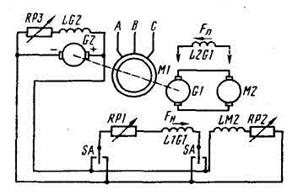
Рис. 9.3. Схема системы генератор – двигатель
Система действует следующим образом.
Сначала пускают приводной ЭД М1, якорь которого затем вращается постоянно в одну сторону с неизменной скоростью. Потом при помощи регулировочного резистора
( реостата возбуждения ) RP3 возбуждают возбудитель G2, создающий неизменное напря-
От него получают питание независимые обмотки возбуждения исполнительного электродвигателя LM2 и генератора L1G1.
В цепь первой включен регулировочный резистор RP2, в цепь второй – регулиро-
вочный резистор RP1 и переключатель SA, изменяющий направление тока в обмотке L1G1.
Перед пуском резистор RP1 должен быть полностью введен в цепь, а резистор RP2 - выведен.
Для пуска М2 переключатель SA устанавливают в одно из рабочих положений и
постепенно выводят резистор RP1, увеличивая этим ток возбуждения в обмотке L1G1.
Последний возбуждается и подает плавно возрастающее напряжение на якорную обмотку М2. По цепи якорей G1 и М2 протекает ток.
Так как М2 возбужден, его якорь начинает вращаться, и по мере возрастания напря-
жения, подведенного к его якорю, увеличивается угловая скорость. При полностью выве-
денном резисторе RP1 напряжение G1 и угловая скорость М2 номинальные.
Для реверса переключателем SA изменяют направление тока в обмотке возбужде-
ния L1G1. Генератора изменяет полярность напряжения, ток якорной цепи изменяет на-
правление, и исполнительный двигатель М2 реверсируется.
Регулирование скорости вниз от номинальной выполняют, вводя в цепь обмотки возбуждения L1G1 регулировочный резистор RP1. Ток возбуждения, магнитный поток и напряжение генератора уменьшаются. Вследствие этого снижается напряжение, подведенное к обмотке якоря М2, и его угловая скорость уменьшается ( характеристики 3, 2 и 1 на
Регулирование скорости вверх от номинальной осуществляют, вводя в цепь обмот-
ки возбуждения М2 регулировочный резистор RP2, что уменьшает ток и поток возбужде-
ния, при этом скорость ЭД увеличивается ( характеристики 5, 6 и 7 на рис. 9.4 ).
кому увеличению тока якорей двигателя М2 и генератора G1 до значения, равного пуско-
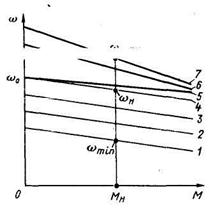
Рис. 9.4. Механические характеристики исполнительного двигателя
в системе генератор – двигатель: 4 – естественная; 3, 2 и 1 – искусственные, полученные уменьшение напряжения на обмотке якоря М2; 5, 6 и 7 –искусствен-
ные, полученные ослаблением магнитного потока М2
Кроме того, такое увеличение тока приводит к увеличению нагрузки на приводной двигатель генератора. Это особенно опасно, если генератор G1 приводится во вращение дизелем. Как известно, дизели крайне чувствительны к перегрузкам ( не более 10% мощ-
ности в течение 1 часа ).
Поэтому на судах применяют систему Г-Д с противокомпаундным генератором. Она отличается от системы Г-Д в чистом виде тем, что генератор, помимо независимой обмотки возбуждения L1G1, снабжен еще одной обмоткой возбуждения – противоком-
паундной обмоткой L2G1, включенной последовательно в цепь якоря G1 и выполняющей функции жесткой обратной связи по току ( на рис. 9.3 место включения обмотки L2G1 по
казана при помощи стрелок, т.е. последовательно в цепь главного тока ).
Ее намагничивающая сила Fнаправлена встречно намагничивающей силе Fоб-
мотки независимого возбуждения L1G1, т. е. она действует на генератор размагничиваю-
Общий магнитный поток возбуждения генератора создается разностью намагничи-
вающих сил обеих обмоток.
При нормальной нагрузке намагничивающая сила обмотки L1G1 значительно боль
ше, чем обмотки L2G1, и генератор развивает ЭДС, как в обычной системе Г-Д.
При перегрузке разность намагничивающих сил обмоток уменьшается, магнитный поток и ЭДС генератора снижаются, напряжение, подведенное к ЭД, падает, и угловая скорость ЭД становится меньше.
При остановке якоря исполнительного двигателя М2 ЭДС генератора G1 настолько уменьшается, что ток стоянки оказывается в пределах кратковременно допустимого, обыч
но равного ( 2,2…2,5) I.
Система Г-Д обладает исключительно хорошими регулировочными свойствами и позволяет регулировать скорость в пределах 1 : 30. Регулирование получается плавным, так как из-за сравнительно небольших токов возбуждения можно сделать регулировочные резисторы с большим количеством ступеней.
Систему Г – Д применяют в электроприводах мощностью более 75…80 кВт – тя-
желовесных лебедках и кранах, брашпилях, а также на судах с ГЭУ для привода гребного винта.
Существенный недостаток системы Г - Д – большое количество установленных эле
Развитие полупроводниковой техники позволило перейти от рассмотренной систе-
2.3. Регулирование скорости в системе двойного рода тока ( УВП – Д )
В таких системах исполнительный двигатель постоянного тока получает питание от судовой сети через управляемый вентильный преобразователь ВП ( рис. 9.5 ).
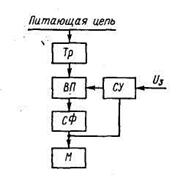
Рис. 9.5. Структурная схема тиристорного электропривода постоянного тока
В качестве вентилей используются управляемые полупроводниковые диоды – тиристоры.
В общем случае такой электропривод состоит из следующих основных элементов:
1. силовой трансформатор Тр;
2. вентильный преобразователь ВП;
3. сглаживающий фильтр СФ;
4. электродвигатель М;
5. система управления СУ.
Силовой трансформатор Тр служит для согласования номинального напряжения двигателя с выходным напряжением преобразователя.
Вентильный преобразователь выпрямляет напряжение и регулирует его в нужных
пределах. Для питания цепей якоря двигателя применяют однополупериодные схемы с нулевым выводом ( рис. 9.6, а ) или двухполупериодные мостовые схемы ( рис.9.6., б ).
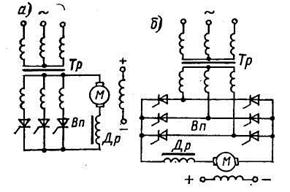
Рис. 9.6. Схемы включения якоря двигателей постоянного тока на вентильный преобразователь: с нулевым выводом ( а ); мостовая ( б )
В таких схемах обмотки возбуждения двигателей обычно получают питание от об-
щей сети переменного тока через маломощные однофазные выпрямители.
Сглаживающий фильтр ( дроссель Др на рис.9.6 ) предназначен для уменьшения пульсаций выпрямленного напряжения. При этом улучшаются условия коммутации и уменьшается нагрев обмотки якоря двигателя.
Система управления СУ изменяет угол отпирания тиристоров α. Вследствие чего изменяется выпрямленное напряжение на якоре исполнительного двигателя, а значит, и его скорость
При этом, при малых скоростях якоря этот угол близок к 90º, а для разгона якоря
СУ непрерывно уменьшает этот угол. При номинальном ( наибольшем ) напряжении на якоре угол α = 0º.
Механические характеристики двигателя при разных значениях угла отпирания тиристоров α приведены на рис. 9.7.
Они подобны механическим характеристикам исполнительного двигателя в систе-
ме Г – Д ( рис. 9.4 ).
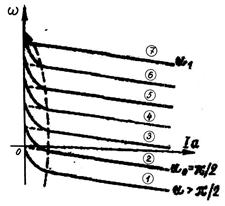
Рис. 9.7. Электромеханические характеристики двигателя при разных значениях угла α
На рис. 9.7 штриховой линией показана граница между режимами непрерывного
( справа от пунктирной линии ) и прерывистого ( слева от этой линии ) токов якоря двига-
Электромеханические характеристики имеют такие особенности:
1. при уменьшении угла отпирания тиристоров от α = π / 2 = 90º ( характеристика
2 ) до α= 0º ( характеристика 7 ) скорость двигателя увеличивается, двигатель работает в двигательном режиме;
2. при увеличении угла α свыше 90º ( характеристика 1 ) ток якоря двигателя не
изменяет направление, но двигатель реверсирует и переходит в режим тормозного спуска.
при котором электромагнитный момент двигателя, направленный на подъем, ограничива-
Для изменения числа пар полюсов в одни и те же пазы статора можно уложить отдельные обмотки с разными числами полюсов. В зависимости от необходимой частоты вращения включается одна или другая обмотка. При этом работает одна или другая обмотка, что снижает использование материалов. Поэтому желательно иметь одну обмотку и путем изменения ее схемы соединения изменять число пар полюсов. Пример такого… Читать ещё >
Регулирование частоты вращения ( реферат , курсовая , диплом , контрольная )
Полюсное регулирование.
Этот способ регулирования основан на изменении числа пар полюсов р вращающегося магнитного ноля статора, т. е. на изменении частоты вращения магнитного поля пл = 60/,/р. Регулирование скорости путем переключением числа пар полюсов ступенчатое.
Следует иметь в виду, что скорость вращения при частоте сети 50 Гц и р= и 2 соответственно 3000 и 1500 об/мин, а при р = 5 и 6 600 и 500 об/мин. При большем числе полюсов разница между частотами вращения уменьшается.
Двигатели с изменением числа пар полюсов называются многоскоростными. Промышленностью выпускаются двигатели на две, три и четыре скорости.
Для изменения числа пар полюсов в одни и те же пазы статора можно уложить отдельные обмотки с разными числами полюсов. В зависимости от необходимой частоты вращения включается одна или другая обмотка. При этом работает одна или другая обмотка, что снижает использование материалов. Поэтому желательно иметь одну обмотку и путем изменения ее схемы соединения изменять число пар полюсов. Пример такого переключения двух катушек одной фазы показан на рис. 3.12.1, я, б. В первом случае катушки включены последовательно, во втором — параллельно.

Рис. 3.12.1. Изменение числа полюсов магнитного поля при включении катушек фазы статорной обмотки последовательно (я) и параллельно (б).
В результате изменится направление токов в проводниках, составляющих фазу обмотки, и топография магнитного поля станет иной. При последовательном соединении катушек обмотки статора образуются четыре полюса, а при параллельном — лишь два.
Регулирование скорости асинхронного двигателя
Наиболее распространены следующие способы регулирования скорости асинхронного двигателя : изменение дополнительного сопротивления цепи ротора, изменение напряжения, подводимого к обмотке статора, двигателя изменение частоты питающего напряжения, а также переключение числа пар полюсов.

Регулирование частоты вращения асинхронного двигателя путем введения резисторов в цепь ротора
Введение резисторов в цепь ротора приводит к увеличению потерь мощности и снижению частоты вращения ротора двигателя за счет увеличения скольжения, поскольку n = n о (1 - s).
Из рис. 1 следует, что при увеличении сопротивления в цепи ротора при том же моменте частота вращения вала двигателя уменьшается.
Жесткость механических характеристик значительно снижается с уменьшением частоты вращения, что ограничивает диапазон регулирования до (2 - 3) : 1. Недостатком этого способа являются значительные потери энергии, которые пропорциональны скольжению. Такое регулирование возможно только для двигателя с фазным ротором.

Регулирование частоты вращения асинхронного двигателя изменением напряжения на статоре
Изменение напряжения, подводимого к обмотке статора асинхронного двигателя , позволяет регулировать скорость с помощью относительно простых технических средств и схем управления. Для этого между сетью переменного тока со стандартным напряжением U 1ном и статором электродвигателя включается регулятор напряжения .
При регулировании частоты вращения асинхронного двигателя изменением напряжения, подводимого к обмотке статора, критический момент М кр асинхронного двигателя изменяется пропорционально квадрату подводимого к двигателю напряжения U рет (рис. 3 ), а скольжение от U рег не зависит.

Рис. 1. Механические характеристики асинхронного двигателя с фазным ротором при различных сопротивлениях резисторов, включенных в цепь ротора

Рис. 2. Схема регулирования скорости асинхронного двигателя путем изменения напряжения на статоре

Рис. 3. Механические характеристики асинхронного двигателя при изменении напряжения подводимого к обмоткам статора
Если момент сопротивления рабочей машины больше пускового момента электродвигателя (Мс > Мпуск), то двигатель не будет вращаться, поэтому необходимо запустить его при номинальном напряжении Uном или на холостом ходу.
Регулировать частоту вращения короткозамкнутых асинхронных двигателей таким способом можно только при вентиляторном характере нагрузки. Кроме того, должны использоваться специальные электродвигатели с повышенным скольжением. Диапазон регулирования небольшой, до n кр.
Для изменения напряжения применяют трехфазные автотрансформаторы и тиристорные регуляторы напряжения.

Рис. 4. Схема замкнутой системы регулирования скорости тиристорный регулятор напряжения - асинхронный двигатель (ТРН - АД)
Замкнутая схема управления асинхронным двигателем , выполненным по схеме тиристорный регулятор напряжения - электродвигатель позволяет регулировать скорость асинхронного двигателя с повышенным скольжением (такие двигатели применяются в вентиляционных установках).
Регулирование частоты вращения асинхронного двигателя изменением частоты питающего напряжения
Так как частота вращения магнитного поля статора n о = 60 f /р, то регулирование частоты вращения асинхронного двигателя можно производить изменением частоты питающего напряжения.

Принцип частотного метода регулирования скорости асинхронного двигателя заключается в том, что, изменяя частоту питающего напряжения, можно в соответствии с выражением при неизменном числе пар полюсов р изменять угловую скорость n о магнитного поля статора.
Этот способ обеспечивает плавное регулирование скорости в широком диапазоне, а механические характеристики обладают высокой жесткостью.
Для получения высоких энергетических показателей асинхронных двигателей (коэффициентов мощности, полезного действия, перегрузочной способности) необходимо одновременно с частотой изменять и подводимое напряжение. Закон изменения напряжения зависит от характера момента нагрузки Мс. При постоянном моменте нагрузки напряжение на статоре должно регулироваться пропорционально частоте.
Схема частотного электропривода приведена на рис. 5, а механические характеристики АД при частотном регулировании — на рис. 6.

Рис. 5. Схема частотного электропривода

Рис. 6. Механические характеристики асинхронного двигателя при частотном регулировании
С уменьшением частоты f критический момент несколько уменьшается в области малых частот вращения. Это объясняется возрастанием влияния активного сопротивления обмотки статора при одновременном снижении частоты и напряжения.
Частотное регулирование скорости асинхронного двигателя позволяет изменять частоту вращения в диапазоне (20 - 30) : 1. Частотный способ является наиболее перспективным для регулирования асинхронного двигателя с короткозамкнутым ротором. Потери мощности при таком регулировании невелики, поскольку минимальны потери скольжения.

Большинство современных преобразователей частоты построено по схеме двойного преобразования. Они состоят из следующих основных частей: звена постоянного тока (неуправляемого выпрямителя), силового импульсного инвертора и системы управления.
Звено постоянного тока состоит из неуправляемого выпрямителя и фильтра. Переменное напряжение питающей сети преобразуется в нем в напряжение постоянного тока.
Силовой трехфазный импульсный инвертор содержит шесть транзисторных ключей. Каждая обмотка электродвигателя подключается через соответствующий ключ к положительному и отрицательному выводам выпрямителя. Инвертор осуществляет преобразование выпрямленного напряжения в трехфазное переменное напряжение нужной частоты и амплитуды, которое прикладывается к обмоткам статора электродвигателя.
В выходных каскадах инвертора в качестве ключей используются силовые IGBT-транзисторы. По сравнению с тиристорами они имеют более высокую частоту переключения, что позволяет вырабатывать выходной сигнал синусоидальной формы с минимальными искажениями. Регулирование выходной частоты I вых и выходного напряжения осуществляется за счет высокочастотной широтно-импульсной модуляции.
Регулирование частоты вращения асинхронного двигателя переключение числа пар полюсов
Ступенчатое регулирование скорости можно осуществить, используя специальные многоскоростные асинхронные двигатели с короткозамкнутым ротором.
Из выражения n о = 60 f /р следует, что при изменении числа пар полюсов р получаются механические характеристики с разной частотой вращения n о магнитного поля статора. Так как значение р определяется целыми числами, то переход от одной характеристики к другой в процессе регулирования носит ступенчатый характер.
Существует два способа изменения числа пар полюсов. В первом случае в пазы статора укладывают две обмотки с разным числом полюсов. При изменении скорости к сети подключается одна из обмоток. Во втором случае обмотку каждой фазы составляют из двух частей, которые соединяют параллельно или последовательно. При этом число пар полюсов изменяется в два раза.

Рис. 7. Схемы переключения обмоток асинхронного двигателя: а - с одинарной звезды на двойную; б - с треугольника на двойную звезду
Регулирование скорости путем изменения числа пар полюсов экономично, а механические характеристики сохраняют жесткость. Недостатком этого способа является ступенчатый характер изменения частоты вращения асинхронного двигателя с короткозамкнутым ротором. Выпускаются двухскоростные двигатели с числом полюсов 4/2, 8/4, 12/6. Четырехскоростной электродвигатель с полюсами 12/8/6/4 имеет две переключаемые обмотки.
Использованы материалы книги Дайнеко В.А., Ковалинский А.И. Электрооборудование сельскохозяйственных предприятий.
Регулирование частоты вращения. Частоту вращения электродвигателей постоянного тока регулируют: введением резисторов в цепь якоря двигателя; изменением магнитного потока; изменением напряжения, приложенного к якорю электродвигателя.
В зависимости от способа регулирования частоты вращения получаются различные искусственные механические характеристики.
При введении резисторов в цепь якоря у двигателей с независимым и параллельным возбуждением магнитный поток не изменяется, следовательно, остается постоянной частота вращения идеального холостого хода nx, но значение сопротивления вводимого резистора оказывает большое влияние на наклон механической характеристики, так как возрастает угловой коэффициент:
Поэтому искусственная механическая характеристика двигателей с независимым и параллельным возбуждением представляет собой прямую линию 1 (рис. 2.3), проходящую через одну точку nx с естественной характеристикой 0 и наклоном β1, определяемым значением сопротивления вводимого резистора.

Рис. 2.3. Механические характеристики электродвигателя с параллельным возбуждением
Изменение сопротивления цепи якоря для двигателя с последовательным возбуждением приведет к смещению характеристики вниз в сторону уменьшения n.
Магнитный поток электродвигателей можно изменить введением дополнительного резистора в цепь обмотки возбуждения, причем уменьшаются ток возбуждения и магнитный поток двигателя.
Изменение магнитного потока приводит к увеличению частоты вращения идеального холостого хода и изменению наклона механической характеристики у двигателей с независимым, параллельным и смешанным возбуждением.
Действительно, если Ф = Ф0, то для естественной характеристики
Таким образом, искусственная механическая характеристика, полученная при введении резистора в цепь обмотки возбуждения двигателя, располагается выше естественной (характеристика 2), частота вращения идеального холостого хода и наклон характеристики увеличиваются.
Изменение питающего цепь якоря напряжения при неизменном напряжении в цепи независимой обмотки возбуждения приводит у двигателей с независимым возбуждением к изменению частоты вращения идеального холостого хода при неизменном наклоне характеристики.

Следовательно, искусственная характеристика расположится ниже естественной и будет параллельна ей (характеристика 3). У двигателя, имеющего смешанное возбуждение, искусственная характеристика также будет ниже естественной.
Анализируя полученные механические характеристики электродвигателей постоянного тока, можно установить, что при одном и том же моменте на валу электродвигателя частота вращения его на разных характеристиках будет различной. Поэтому частоту вращения электродвигателей регулируют способами, используемыми для получения искусственных характеристик. Различают параметрическое и импульсное регулирование.
При параметрическом способе изменяется какой-либо параметр, который далее остается неизменным. Импульсное регулирование характеризуется периодическим ступенчатым изменением какого-либо параметра с определенной частотой.
Каждому из параметрических способов присущи свои особенности, определившие область их применения.
Введение резистора в цепь якоря приводит к уменьшению частоты вращения, причем эффективность регулирования тем больше, чем больше нагружен двигатель. Способ не экономичен из-за больших потерь энергии в дополнительном резисторе, но все же используется вследствие его простоты.
Введение резистора в цепь обмотки возбуждения приводит к увеличению частоты вращения. Этот способ экономичен, так как ток возбуждения составляет 2—5 % тока якоря и потери в резисторе невелики. Однако этот способ не позволяет получить частоту вращения двигателя меньше номинальной.
Изменение приложенного к якорю напряжения — наиболее удачный способ регулирования. Он экономичен и допускает регулирование частоты вращения в достаточно широких пределах при любых значениях нагрузки, но требует автономных источников питания с широким диапазоном изменения напряжения. Поэтому его целесообразно применять для электроприводов с частыми пусками и большим диапазоном регулирования частоты вращения электродвигателя (рулевые электроприводы, электроприводы оперативных лебедок земснарядов, гребные электрические установки и т.п.). Автономным источником питания может служить генератор постоянного тока с независимым возбуждением. Напряжение можно регулировать с помощью управляемого выпрямителя или магнитного усилителя.
Из импульсных способов регулирования двигателей постоянного тока наиболее широкое распространение получил способ изменения времени включения приложенного к якорю напряжения при постоянной частоте включения. Этот способ называется широтно-импульсным. Среднее значение приложенного к якорю напряжения

Изменяя tp при постоянном Т (изменяя скважность), регулируют среднее значение приложенного к якорю двигателя напряжения и частоту вращения электродвигателя. Частоту включения обычно выбирают в пределах 500—1000 Гц. Возможен другой способ импульсного регулирования, когда время включения tр остается постоянным, а период Т изменяется. Такой способ принято называть частотно-импульсным.
Импульсное регулирование электродвигателей постоянного тока является перспективным для тех электроприводов, для которых применяется регулирование изменением приложенного к якорю напряжения. Основным недостатком этого способа является большое число включений, приводящих к появлению больших переходных токов и требующих специальной аппаратуры.
Пуск электродвигателей постоянного тока. Как известно из курса электротехники, вращающий момент электродвигателя при пуске

Пусковой ток может значительно превышать номинальный ток двигателя из-за отсутствия противо-э. д. с. в момент пуска.
При пуске все дополнительные резисторы в цепях независимой и параллельной обмоток возбуждения должны быть введены и последовательная обмотка не шунтирована.
Отечественная промышленность изготовляет электродвигатели, пусковой ток которых по условиям коммутации должен удовлетворять неравенству Iя.п≤2,5Iя.ном.
При этом наибольший пусковой момент двигателей с независимым и параллельным возбуждением при Ф = const будет также Мп≤2,5Мном.
При таком же пусковом токе у двигателей со смешанным и последовательным возбуждением пусковой момент будет несколько больше вследствие увеличения магнитного потока, создаваемого последователь ной обмоткой, по сравнению с номинальным.
По мере увеличения частоты вращения двигателя растет противо- э.д.с., что приводит к уменьшению тока якоря
следовательно, будет уменьшаться вращающий момент двигателя.
Для обеспечения наиболее быстрого разгона двигателя необходимо поддерживать при пуске момент и ток якоря в определенных пределах.
Различают следующие способы пуска электродвигателей постоянного тока: прямой, с ограничением пусковых токов вследствие изменения сопротивления цепи якоря и импульсный.
Прямой пуск осуществляется непосредственно включением двигателя на полное напряжение сети при отсутствии добавочных элементов в цепях якоря и возбуждения. Преимуществами этого способа являются его простота и отсутствие дополнительной пусковой аппаратуры, недостатком — большой ток в цепи якоря в первоначальный момент пуска, что вызывает искрение на коллекторе, возникновение значительного момента на валу двигателя и колебания напряжения в судовой сети. Прямой пуск применяют для двигателей постоянного тока мощностью не более 1,5 кВт.
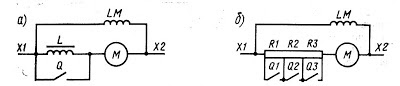
Рис. 2.4. Пуск двигателя постоянного тока
Параметрический пуск основан на предварительном изменении какого-либо параметра двигателя, ограничивающего пусковой ток, с последующим его приведением в процессе пуска к значению соответствующему номинальному режиму.
Для двигателей небольшой мощности применяют пуск с помощью реактора L, включенного последовательно в цепь якоря двигателя (рис. 2.4, а). При правильно подобранной индуктивности реактора время нарастания тока, определяемое электромагнитной постоянной времени электрической цепи,
соизмеримо с временем разгона электродвигателя, что значительно снижает пик пускового тока. Недостатками этого способа являются большие габаритные размеры и масса пускового реактора.
Наибольшее применение получил реостатный способ пуска, при этом способе в цепь якоря для ограничения пусковых токов включают дополнительный реостат (рис. 2.4, б), состоящий из трех-четырех резисторов. По мере разгона электродвигателя секции реостата поочередно закорачивают.
В некоторых случаях пользуются способом пуска, основанным на ступенчатом или плавном изменении напряжения, приложенного к якорю двигателя, от нуля до номинального значения. Этот способ возможен при питании якоря электродвигателя от отдельного источника с регулируемым напряжением. В качестве такого источника могут быть использованы генератор постоянного тока с независимым возбуждением, регулируемый трансформатор с выпрямителем, трансформатор с управляемым выпрямителем.
При импульсном пуске, так же как и при импульсном регулировании частоты вращения, может быть использован как широтно-импульсный, так и частотно-импульсный способ. В том и другом случае пуск осуществляется изменением скважности от нуля до номинального значения.
Реверсирование электродвигателей постоянного тока. Реверсирование— изменение направления вращения на противоположное. Для реверсирования необходимо изменить направление вращающего момента М = СмФIя, что возможно осуществить изменением направления тока в якоре электродвигателя или изменением направления магнитного потока путем изменения направления тока в обмотках возбуждения.
Для двигателей с независимым и параллельным возбуждением предпочтительнее первый способ по сравнению со вторым по сле-дующим причинам:
во-первых, при размыкании обмотки возбуждения, предшествующем ее переключению, возникает значительная э. д. с. самоиндукции
затрудняющая процесс коммутации и увеличивающая вероятность пробоя изоляции;
во-вторых, при реверсировании двигатель сначала необходимо остановить, а затем он начинает вращаться в обратную сторону. Но уменьшение магнитного потока вызовет не уменьшение, а увеличение частоты вращения.
Для двигателей со смешанным возбуждением реверсирование изменением направления магнитного потока еще более затруднено по сравнению с двигателем с параллельным возбуждением, так как у него необходимо переключать две обмотки возбуждения. Для двигателей с последовательным возбуждением оба способа равноценны.
Торможение электродвигателей постоянного тока. При режиме торможения электромагнитный момент на валу электродвигателя направлен в сторону, противоположную направлению вращения.
Режимы торможения используются, когда необходимо: остановить электропривод, вращающийся по инерции; остановить электропривод, вращающийся под действием момента, создаваемого рабочей машиной, например: под действием опускаемого подъемным краном груза; замедлить вращение электропривода при воздействии момента, создаваемого рабочей машиной.
Чтобы осуществить режим торможения электродвигателя, нужно изменить направление вращающего момента на его валу, при этом двигатель переходит в генераторный режим работы. В зависимости от использования энергии различают три вида торможения: рекуперативное, динамическое и противовключением. Рекуперативное торможение сопровождается возвратом энергии в питающую сеть. При динамическом торможении и торможении противовключением энергия превращается в тепловую в элементах цепи якоря двигателя.
Торможение с отдачей энергии в сеть, или рекуперативное торможение, наступает, тогда, когда электродвигатель под действием момента рабочей машины (идущий под уклон железнодорожный состав, опускающийся на подъемном кране груз) разгоняется до частоты вращения, превышающей частоту вращения идеального холостого хода. В этом случае э.д.с. якоря будет больше напряжения в сети, ток изменит свое направление и машина будет работать в режиме генератора, отдавая энергию в сеть. При этом направление вращения двигателя не изменится. Механическая характеристика двигателя с параллельным возбуждением О (рис. 2.5) при торможении с отдачей энергии в сеть будет являться продолжением характеристики

Рис. 2.5. Механические характеристики двигателя постоянного тока при рекуперативном торможении
в область отрицательных моментов. Область режима торможения обозначена цифрой II, область двигательного режима — цифрой I.
У двигателей со смешанным возбуждением при переходе в режим торможения ток в последовательной обмотке меняет свое направление, и поэтому она противодействует параллельной обмотке, размагничивая машину и уменьшая момент торможения (штриховая линия). Во избежание этого последовательную обмотку закорачивают или отключают (характеристика I).
Двигатели с последовательным возбуждением не могут работать в режиме торможения с отдачей энергии в сеть, так как с увеличением частоты вращения ток двигателя уменьшается и он размагничивается. Его э.д.с. никогда не может быть больше напряжения в сети.
Динамическое торможение осуществляют отключением якоря от сети и замыканием его на резистор. Различают два вида динамического торможения: с независимым возбуждением и с самовозбуждением.

Рис. 2.6. Схемы включения и механические характеристики двигателей при динамическом торможении
При торможении двигателей с независимым и параллельным возбуждением применяют торможение с независимым возбуждением (рис. 2.6, а).
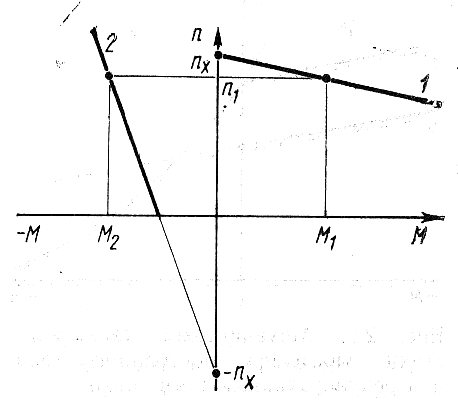
Рис. 2.7. Механическая характеристика двигателя постоянного тока с параллельным возбуждением при торможении противовключением
В этом случае якорь Двигателя отключается от питающей сети и включается на тормозной резистор R1, обмотка возбуждения остается включенной в сеть.
У двигателя со смешанным возбуждением последовательная обмотка отключается или закорачивается.
Торможение двигателя с последовательным возбуждением при питании обмотки возбуждения от сети (рис. 2.6, б) более эффективно, чем торможение с самовозбуждением (рис. 2.6, в), однако для ограничения тока в обмотке необходимо ее подключать через дополнительный резистор R2, мощность рассеяния которого должна равняться мощности электродвигателя
Уравнение механической характеристики при динамическом торможении (при U = 0)
При Ф = const (независимое возбуждение) оно представляет собой уравнение прямой линии.
При самовозбуждении в связи с изменением магнитного потока характеристика искривляется, а при некотором значении частоты вращения самовозбуждение и торможение двигателя прекращаются.
На рис. 2.6, г показаны механические характеристики для динамического торможения: 0 — для торможения с независимым возбуждением; 1 — для торможения с самовозбуждением. Штриховой линией показан участок, на котором торможение прекращается.
Торможение противовключением производится быстрым реверсированием двигателя по ходу, когда якорь по инерции продолжает вращаться в одном направлении, а обмотки включаются на противоположное. При этих режимах знаки пх и п противоположны, э. д. с. якоря двигателя совпадает по направлению с напряжением и ток якоря
так как в начале торможения Е ≈ U, сопротивление резистора R1 необходимое для ограничения тока до допустимых пределов, должно быть примерно в 2 раза больше пускового сопротивления двигателя. Механическая характеристика при этом способе торможения двигателя с параллельным возбуждением приведена на рис. 2.7 (характеристика 2).
Если двигатель предварительно работал с М1>0 и n1>0 на характеристике 1, то при торможении противовключением уравнение механической характеристики будет

При быстром реверсировании частота вращения двигателя не успеет измениться и режим торможения будет соответствовать точке с моментом М2 и частотой вращения n1 на характеристике 2.
Из рис. 2.7 видно, что при торможении противовключением в момент остановки двигателя (n = 0) момент на его валу не обращается в нуль. Поэтому после остановки двигатель может начать вращаться в обратную сторону. Во избежание этого двигатель после остановки должен быть отключен от сети.
Читайте также: