
Реферат на тему зубчатые и храповые механизмы
Обновлено: 02.07.2024
Храповое колесо 1 вращается вокруг неподвижной оси А. Защелка 2, находящаяся под действием пружины 3, может двигаться поступательно в неподвижных направляющих b — b. Защелка 2 имеет зуб а, входящий в зацепление с зубьями d колеса 1. Палец 4 фиксирует положение защелки 2. Поворачивая защелку 2 на 180°, можно ограничить движение колеса 1 в любом из двух направлений.
Призматическое звено 1, движущееся поступательно в неподвижной направляющей а, имеет скос b. Реечная собачка 3, скользящая в направляющих d — d, имеет зуб е и ролик 2. Храповое колесо 5 вращается вокруг неподвижной оси А. При опускании звена 1 скос b, воздействуя на ролик 2, перемещает рейку 3. Рейка 3 зубом е поворачивает колесо 5 на один зуб в направлении, указанном стрелкой. При подъеме звена 1 пружина 4 возвращает рейку 3 в исходное положение.
При вращении ручки 1 вокруг неподвижной оси В пружина 3 заводится. Одновременно с этим штифт а, двигаясь в винтовой прорези храпового колеса 2, передвигает последнее вдоль его собственной оси, пока зуб колеса 2 не сойдет с упора b стойки; после этого колесо 2 совершает винтовое движение, поворачиваясь на один зуб.
Выступающая кромка обода колеса 1, вращающегося вокруг неподвижной оси A, может скользить в дуговой щели, образованной звеньями 2 и 3. Звено 2 снабжено рукояткой 4, при движении которой вместе со звеном 2 в направлении, указанном стрелкой, звенья 2 и 3 свободно скользят по кромке обода колеса 1. При движении в противоположном направлении звенья 2 и 3, сближаясь, зажимают обод колеса 1, благодаря чему все звенья вместе с колесом 1 движутся как одно целое.
Звено 1 движется поступательно в неподвижных направляющих а — а. Собачки 3 и 4 вращаются вокруг осей С и В звена 1, входя попеременно в зацепление с зубьями d колеса 2, вращающегося вокруг неподвижной оси A. Собачки 3 и 4 снабжены пружинами b. При возвратно-поступательном движении звена 1 оно скользит прорезью f по втулке колеса 2 и собачками 3 и 4 поворачивает его в направлении, указанном стрелкой. Вращение колеса 2 в обратном направлении стопорится собачками 3 и 4. Детали е служат для фиксации колеса 2 в моменты выхода и входа в зацепление собачек 3 и 4.
Храповые колеса 1 и 5, жестко связанные друг с другом, вращаются вокруг неподвижной оси А. Поворот колес 1 и 5 осуществляется двумя ведущими собачками 3 и 4, вращающимися вокруг неподвижных осей В и С. Собачка 3 своим концом а входит в зацепление с зубом b колеса 1 и одновременно концом d выводит из зацепления стопорную собачку 2, вращающуюся вокруг неподвижной оси D. После того как колесо 1 повернется на некоторый угол, собачка 3 выходит из зацепления и колеса 1 и 5 блокируются стопорной собачкой 2. После этого от отдельного привода входит в зацепление с зубом колеса 5 конец е собачки 4, одновременно выводя концом k из зацепления стопорную собачку 2. Попеременным воздействием собачек 3 и 4 на колеса 1 и 5 осуществляется прерывистое движение храповых колес 1 и 5 в направлении, указанном стрелкой.
Звено 1 вращается вокруг неподвижной оси А. В симметрично расположенных пазах а скользят три призматические собачки 2, 3 и 4, оси скольжения которых образуют между собой углы 120°. Храповое колесо 5 с зубьями b свободно вращается вокруг оси А. Зубья b, расположенные на внутренней поверхности храпового колеса 5, входят в зацепление с собачками 2, 3 и 4, обеспечивая вращение колеса 5 только в сторону, указанную стрелкой, с угловой скоростью, равной угловой скорости звена 1. При обратном вращении звена 1 колесо 5 находится в покое.
Храповое колесо 1 с зубьями, расположенными на внутренней поверхности колеса, вращающееся вокруг неподвижной оси A, зубьями а входит в зацепление с четырьмя собачками 2, вращающимися вокруг осей В звена 3. Собачки 2 прижимаются к зубьям а пружинами 4. При вращении звена 3 колесо 1 вращается с той же угловой скоростью и не может поворачиваться относительно звена 3 в обратном направлении.
Храповое колесо 1, вращающееся вокруг неподвижной оси A, зубьями а входит в зацепление с четырьмя собачками 2, вращающимися вокруг осей В колеса 3, свободно вращающегося вокруг оси А. Одновременно находится в зацеплении не менее двух собачек. При вращении колеса 1 колесо 3 вращается с той же угловой скоростью.
Звено 1, имеющее клин b, скользит в неподвижных направляющих а. Защелка 3, скользящая в неподвижных направляющих е, оканчивается стопором f, фиксирующим деталь k штанги 2, скользящей в звене 1. Защелка 3 прижимается пружиной 5, а звено 1 отжимается пружиной 6. При нажатии на звено 1 в направлении, указанном стрелкой, последнее, воздействуя клином m на скошенную часть n защелки 3, выводит из зацепления с деталью k стопор, тем самым освобождая звено 2, которое под действием пружины 4, так же как и звено 1, двигается в направлении, указанном стрелкой.
Колесо 1 вращается вокруг неподвижной оси А. С ободом колеса жестко связан диск а. Собачки 2, свободно вращающиеся вокруг осей В, периодически входят в зацепление с цевками b рейки 4, перекатывающейся по неподвижной плоскости d на роликах 5. При вращении колеса 1 собачки 2 перемещают рейку 4. Собачки 2 выводятся из зацепления и предохраняются от опрокидывания неподвижным кулачком 3, по профилю которого скользят хвостовики e собачек 2.
При нажатии на звено 1 общая защелка 2 поворачивается вокруг неподвижной оси A, освобождая звено 4, которое под действием пружины 3 возвращается в исходное положение.
При нажатии на звено 1 общая защелка 2 сдвигается вдоль неподвижной направляющей а, освобождая, таким образом, второе звено 4, которое под действием пружины 3 возвращается в исходное положение.
Диски 1 и 2 свободно вращаются вокруг неподвижной оси A. Собачка 4 вращается вокруг неподвижной оси В. При отжатии собачки 4 диск 1 под действием пружины 3, одним концом укрепленной на диске 2, а другим концом — на диске 1, поворачивается на полоборота в направлении, указанном стрелкой. Вращением также на пол-оборота в том же направлении диска 2 пружина 3 приводится в исходное состояние. Диск 2 стопорится собачкой 5, вращающейся вокруг неподвижной оси С, прижимаемой пружиной 6.
При отжатии собачки 2, вращающейся вокруг неподвижной оси A, диск 1, вращающийся вокруг неподвижной оси В, под действием пружины 3 поворачивается попеременно в одну и другую сторону. Затяжка пружины 3 производится поворотом звена 4, снабженного выдвигающимся штифтом 5, из положения, указанного штрихами, в положение, показанное на чертеже, и обратно.
Звенья 1 и 2 вращаются вокруг неподвижных осей В и A. Звенья 1 и 2 механизма являются попеременно входными и выходными. При повороте звена 1 по часовой стрелке звено 2 будет неподвижным до тех пор, пока выступ а рычага 1 скользит по впадине b рычага 2. В крайнем положении рычага 1 выступ а выходит из впадины b, и рычаг 2 вращается в направлении часовой стрелки; при этом выступ с скользит по впадине d.
Кулачок 1 вращается вокруг неподвижной оси A, и, воздействуя на ролик 5, поворачивает треугольное звено 6 вокруг неподвижной оси В. Собачка 2 вращается вокруг оси С звена 6 и входит в зацепление с зубьями b храпового колеса 3, вращающегося вокруг неподвижной оси D. При движении ролика 5 по профилированной части кулачка собачка 2 вращает храповое колесо 3 в направлении, указанном стрелкой. Когда ролик 5 движется по дуге а — а кулачка 1, выступ 4 звена 6 предупреждает дальнейший поворот колеса 3.
Зубчатые колеса 2 и 4 и храповые колеса 6 и 7 жестко укреплены на валах 11 и 12, вращающихся вокруг неподвижных осей В и С. Собачки 9 и 10 укреплены на зубчатых колесах 3 и 5, свободно вращающихся на валах 11 и 12. Вращение зубчатых колес 2 и 4, вызываемое возвратно-поступательным движением рейки 1, передается посредством храповых колес 6 и 7 и собачек 9 и 10 зубчатым колесам 3 и 5, заставляя их попеременно вращаться в одном или другом направлении в зависимости от направления движения рейки. Зубчатое колесо 8, находящееся в зацеплении с зубчатыми колесами 3 и 5, непрерывно вращается в сторону, указанную стрелкой.
На диск 6, вращающийся вокруг неподвижной оси A, действует момент, создаваемый грузом Q. Диск 6 связан спиральной пружиной 7 со звеном 1. На диске 6 имеются направляющие 5, в которых перемещается собачка 2, входящая в зацепление с неподвижным храповым колесом 4. Под действием спиральной пружины 7 звено 1, поворачиваясь, штифтом а выводит собачку 2 из зацепления с храповым колесом 4, отжимая пружину 3. При этом диск 6 поворачивается до тех пор, пока собачка 2 под действием пружины 3 не войдет в зацепление со следующим зубом неподвижного колеса 4. Кривошип 1 в момент начала поворота звена 6 останавливается под действием механизма, не показанного на чертеже. При повороте звена 6 будет происходить натяжение спиральной пружины 7, и весь процесс повторится.
На диск 5, вращающийся вокруг неподвижной оси A, действует крутящий момент, создаваемый грузом Q. Один конец пружины 4 укреплен на диске 5, другой ее конец действует на собачку 2, которая в точке В шарнирно соединена с диском 5. Под действием пружины 4, которая воздействует через собачку 2 на штифт а звена 1, последнее поворачивается. При этом собачка 2 выходит из зацепления с неподвижным храповым колесом 3 и диск 5 начинает поворачиваться под влиянием груза Q до тех пор, пока собачка 2, упираясь в штифт а звена 1, остановленного специальным устройством, не показанным на чертеже, не войдет в зацепление со следующим зубом колеса 3. При повороте диска 5 производится натяжение пружины 4, что вызывает повторение процесса.
При повороте входного колеса 1, жестко соединенного с храповиком 2, вокруг неподвижной оси А по направлению стрелки выходное колесо 5 поворачивается вокруг неподвижной оси В в указанном на чертеже направлении. Колеса находятся постоянно в зацеплении посредством рычага 4, на котором укреплены колесо 3 и пружина 6. Храповое колесо 2 удерживается в требуемом положении собачкой 7 и пружиной 8. Возврат колеса 5 в исходное положение осуществляется посредством пружины 9 при повороте рычага 4 в указанном на чертеже направлении.
Круглый эксцентрик 1, закрепленный на входном валу 9, вращается вокруг неподвижной оси А. Зубчатое колесо 2, имеющее 96 зубьев, свободно насажено на эксцентрик 1, но удерживается от вращения рукояткой d. Зубчатое колесо 3, имеющее 120 зубьев, свободно вращается на валу 9. Зубчатые колеса 2 и 3 находятся в зацеплении с сателлитом 4 на рычаге 5, укрепленном на валу 9. При вращении вала 9 зубчатое колесо 3 приводится во вращение сателлитом 4. При этом передаточное отношение u13 равно u13 = 5 /4. На другом конце рычага 5 имеется ролик 6, обегающий обод зубчатого колеса 2, представляющий собой окружность с небольшой впадиной а. Размер впадины выбран так, что когда ролик 6 катится по ней, то собачка 7, сидящая с роликом на одной оси, входит в зацепление с храповым колесом 8, укрепленным на валу 10, поворачивая его на 1 /12 оборота. Таким образом, при повороте вала 9 на 1 1 /4 оборота выходной вал 10 делает 1 /12 оборота в том же направлении.
На диск 9, вращающийся вокруг неподвижной оси A, действует вращающий момент, создаваемый грузом 10.Собачка 2 соединена посредством зубчатых колес 5, 6, 7 и 8 с колесом 3, находящимся в зацеплении с неподвижным колесом 4. Диск 9 является поводком в планетарной передаче, состоящей из колес 3 и 4. Пружина 11 прикреплена к колесу 4 и звену 1 со штифтом а, касающимся звена 12, несущего на своей оси тормозную поверхность b. Звено 12 под действием пружины 13 касается своим штифтом с звена 14, жестко соединенного с зубчатым колесом 3. Под действием спиральной пружины 11 звено 1 поворачивается и поворачивает звено 12, освобождая собачку 2. Диск 9 поворачивается под действием груза 10. Колесо 3 обкатывается по неподвижному колесу 4 и совершает один оборот вокруг своей оси, после чего собачка 2 снова затормаживает движение механизма. При этом производится натяжение пружины 11, так как звено 1 в начальный момент движения диска 9 останавливается механизмом, не показанным на рисунке.
На диск 5, вращающийся вокруг неподвижной оси A, действует вращающий момент, создаваемый грузом 6. Храповое колесо 2 жестко соединено с зубчатым колесом 3, находящимся в зацеплении с неподвижным колесом 4. Диск 5 является поводком в планетарной передаче, состоящей из колес 3 и 4. Пружина 7 прикреплена одним концом к диску 5, а другим концом — к звену 1. Под действием пружины 7 звено 1 поворачивается, выходя из зацепления с храповым колесом 2. Диск 5 поворачивается под действием груза 6. Колесо 3 обкатывается по неподвижному колесу 4 до тех пор, пока храповое колесо 2 не войдет в зацепление со звеном 1, предварительно остановленным устройством, не показанным на рисунке. При этом производится натяжение пружины 7.
На диск 6, вращающийся вокруг неподвижной оси A, действует вращающий момент, создаваемый грузом 7. Собачка 2 жестко связана с колесом 3, находящимся в зацеплении с неподвижным колесом 4. Пружина 5 укреплена одним концом на звене 1, а другим концом — на диске 6, являющимся поводком в планетарной передаче, состоящей из колес 3 и 4. Под действием спиральной пружины 5 звено 1, поворачиваясь, воздействует на штифт b звена 8 и поворачивает последнее. Звено 10 при этом поворачивается под действием пружины 9 на небольшой угол и соскальзывает с тормозной поверхности с звена 8. Одновременно с поворотом звена 10 его тормозная поверхность d поворачивается и собачка 2 освобождается. Диск 6 поворачивается и колесо 3, обкатываясь по неподвижному колесу 4, делает один оборот. При этом плечо е собачки 2, воздействуя на плечо а звена 10, поворачивает его так, что оно снова касается тормозной поверхности звена 8, своевременно остановленного устройством, не показанным на рисунке. Пружина 5 при повороте диска 6 заводится. После одного оборота колеса 3 собачка 2 снова затормаживает движение механизма.
На диск 5, вращающийся вокруг неподвижной оси A, действует вращающий момент, создаваемый грузом 6. Собачка 2 жестко соединена с зубчатым колесом 3, находящимся в зацеплении с неподвижным колесом 4. Диск 5 является поводком в планетарной передаче, состоящей из колес 3 и 4. Звено 1 имеет тормозную поверхность а на половине своего диаметра. Пружина 7 прикреплена одним концом к диску 5, а другим концом — к звену 1. Под действием пружины 7 звено 1 поворачивается. При этом собачка 2 перестает соприкасаться с тормозной поверхностью и диск 5 начинает вращаться. Зубчатое колесо 3 обкатывается по неподвижному колесу 4 до тех пор, пока собачка 2 не коснется тормозной поверхности и не остановит движения. Одновременно производится натяжение пружины 7, так как звено 1 останавливается под действием механизма, не показанного на рисунке.
Звено 1, вращающееся вокруг неподвижной оси A, имеет две собачки 3, вращающиеся вокруг осей В и С. Звено 2, свободно вращающееся вокруг оси A, имеет выступы b. При вращении звена 1 в направлении, указанном стрелкой, собачки 3 упираются в выступы и увлекают за собой звено 2. При остановке звена 1 звено 2 может по инерции продолжать свое движение. При обратном направлении вращения звена 1 собачки 3 выходят из зацепления и колесо 2 находится в покое.
При вращении вала 7 вокруг неподвижной оси А связанное с ним храповое колесо 1 сообщает вращение посредством собачек 2 в направлении, указанном стрелкой, фланцу 3, жестко насаженному на вал 8. При этом вал 8 вращается с угловой скоростью, равной угловой скорости вала 7. В отверстиях отростков b собачек 2 располагаются фрикционные пробки, зажатые между фрикционным диском 5 и колесом 1 посредством пружин 6 и шпилек а. При увеличении угловой скорости вала 8, приводимого во вращение, в этом случае посредством зубчатого колеса 4 собачки 2 поворачиваются вокруг своих осей и выходят из зацепления с храповым колесом 1. Поворот собачек ограничивается штифтами d. При выключении обгонного привода вал 8 остается в покое до тех пор, пока собачки 2, повернувшись в обратном направлении относительно своих осей, не войдут в зацепление с храповым колесом 1, после чего валу 8 снова сообщается угловая скорость, равная угловой скорости вала 7.
При вращении эксцентрика 1 вокруг неподвижной оси А щеколда 17, совершая возвратно-поступательное движение, поворачивает храповое колесо 2, жестко насаженное на вал 18, вращающийся вокруг неподвижной оси В. Вал 18, поворачиваясь, заводит последовательно пружины 3, 4, 5, 6 и 7, внешние концы которых закреплены на коробках 8, 9, 10, 11 и 12, а внутренние концы — на втулках этих коробок и колесе 2. Таким образом колесу 13 сообщается вращение. Для того чтобы пружины не были заведены выше определенного предела, предусмотрен механизм останова, состоящий из зубчатых колес 14 и 15 с зубьями а и b, которые после определенного числа оборотов вала 18 упираются друг в друга, предотвращая тем самым вал 18 от дальнейшего поворота. Завод пружин может также осуществляться вручную, при повороте головки 16 по часовой стрелке.
При движении звена 1 слева направо движение передается через рычаг 2 рычагу 3 с защелкой 4, свободно вращающемуся на валу 11 вокруг неподвижной оси А. Защелка 4 под действием пружины 5 нажимает на зубья храпового колеса 6, которое вместе с валом 11 начинает вращаться против часовой стрелки. При движении звена 1 справа налево движение передается через рычаг 7 рычагу 8, который свободно вращается на валу 11. Защелка 9, упираясь в зубья храпового колеса под действием пружины 10, поворачивает его вместе с валом 11 в ту же сторону. Защелка 4 в этом случае скользит по зубьям храпового колеса 6. Таким образом, возвратно-поступательное движение звена 1 преобразуется во вращательное движение вала 11.
Звену 1, на котором шарнирно закреплена собачка 2, сообщается вращение посредством зубчатой передачи, состоящей из колес 3, 4, 5. При этом угловая скорость вращения звена 1 больше скорости вращения поводка 7, жестко насаженного на вал 13, вращающийся вокруг неподвижной оси А. Собачка 2 периодически находится под воздействием профиля b — b кулачка 8, закрепленного на стойке. При соприкосновении кулачка 8 с профилем b — b собачка 2 выходит из зацепления с храповым колесом 9 и зубчатому колесу 10 сообщается вращение посредством муфты свободного хода, состоящей из звеньев 7 и 11. Как только собачка 2 выйдет из зацепления с кулачком 8, она под действием пружины 12 войдет в зацепление с храповым колесом 9 и зубчатому колесу 10 сообщается повышенная скорость. Чтобы иметь постоянное число оборотов колеса 10, собачку 2 выводят из зацепления с храповым колесом 9, закрепляя ее стопором, входящим в отверстие а.

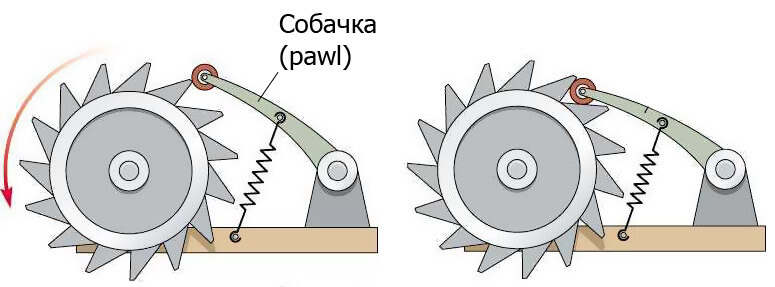
Храповые механизмы находят широкое применение в шаговых двигателях, грузоподъемных устройствах и различных отраслях техни ки. Храповой механизм — устройство, допускающее вращение оси в одном направлении и исключающее вращение этой же оси в противоположном направлении. Он состоит из храпового колеса и собачки. Собачка 1 обычно прижата к колесу пружиной 2 (рис. 1). Реже используют храповые механизмы, в которых собачка взаимодействует с поступательно перемещающейся рейкой. Храповые колеса и собачки изготовляют из сталей 35, 50, У10А, 15Х, 20Х, 25ХГСА. При значительных нагрузках, а также для уменьшения износа их либо подвергают объемной закалке, либо цементируют, а затем закаливают. В приборах храповые колеса изготовляют также из латуней ЛК80-Э и ЛС63-3 и бронзы Бр.КМцЗ-1. Иногда и собачки изготовляют из латуни. Используют также сплавы алюминия.
Пружины храпового механизма создают момент, прижимающий собачку к храповому колесу. Однако этот момент не предназначен для преодоления сил и моментов, которые могут действовать на собачку от храпового колеса. Усилие пружины оказывается для этой цели недостаточным. Оно лишь вводит собачку в зацепление с храповым колесом. Поэтому положение оси С собачки выбирают с таким расчетом, чтобы окружная сила F и вызываемая ею сила трения F обеспечивали появление равнодействующей силы Fn , момент которой на плече Са прижимал бы собачку к храповому колесу, а не выводил ее из зацепления (рис. 1). Это достигается в том случае, если угол a положения оси собачки больше угла j трения. Для обеспечения этого неравенства необходимо удалить ось С собачки от оси храпового колеса (см. собачку, показанную выше колеса). Однако при этом следует опасаться переброса собачки на другую сторону храпового колеса, особенно после некоторого износа собачки. В таких случаях храповой механизм может срываться. Поэтому недопустимо и слишком большое удаление оси С собачки от оси храпового колеса. У собачки, показанной слева от

колеса, для надежного функционирования храпового механизма также необходимо выполнять неравенство к > j, что может быть обеспечено, когда ось, наоборот, находится ближе к оси колеса, а собачка сделана достаточно длинной. При этом момент силы Fn прижимает собачку к храповому колесу. Соответствующее направление нормальной силы Fn можно обеспечить поднутрением передней грани зубьев храпового колеса на угол a. Тогда ось собачки может располагаться на касательной к средней окружности зубьев храпового колеса (рис. 2). Для обеспечения прижатия собачки к зубьям храпового колеса в этом случае необходимо, чтобы угол поднутрения был больше угла трения. Часто a выбирается равным 10°. У этой конструкции при малом окружном шаге зубьев зуб храпового колеса получается ослабленным.
Окружная сила, действующая на диаметре d храпового колеса, F = 2M /d, где М — крутящий момент на ос и храпового колеса; d — диаметр впадин зубьев храпового колеса, d == mz ; z — число зубьев храпового колеса; т — модуль, т = pt /p , р t — окружной шаг зубьев храпового колеса по окружности впадин. На основании расчета по среднему допускаемому давлению можно определить модуль зубьев храпового колеса:


где [p]— допускаемое давление на единицу ширины зуба храпового колеса; определяется по справочнику; y = b/т, b — ширина колеса.
На рис. 3 показана конструкция храповика часового механизма. Вместо храпового колеса использовано обычное колесо с зубьями часового профиля. Это упростило конструкцию, так как сократилось число колес в механизме. Собачка 1 имеет несколько выступов и удерживается на оси винтом 4. На рис. 3, а показано положение собачки относительно колеса 2 при подзаводке часов. Момент М зав отводит собачку, которая одним из своих выступов непрерывно прижимается под действием пружины 3 к зубьям колеса 2, п ропуская их. Выступ собачки захватил конец Д пружины 3, деформируя последнюю. Конец Г пружины закреплен неподвижно. На рис. 3, б показано стопорящее положение собачки, когда она удерживает колесо 2. Зуб колеса упирается в один из выступов собачки. При переходе из положения а в положение б храповое колесо немного поворачивается, благодаря чему ослабляется напряжение заводной пружины после ее тугого завода. Это способствует увеличению срока службы заводной пружины и стало возможным благодаря применению собачки с несколькими выступами.


Храповые механизмы могут обеспечивать преобразование вращательного движения в колебательное или наоборот. На рис. 4 показана конструкция храпового механизма электрических часов, в которой толкающие собачки 1 и 3 преобразуют качания якоря 2 в прерывисто-вращательное движение храпового колеса 4. При движении якоря как в прямом, так и в противоположном направлениях собачки попеременно захватывают и толкают зубья храпового колеса (рис. 4, а, 6). На рис. 5 даны условные обозначения храповых механизмов для схем (ГОСТ 2.770—68): а — односторонний храповой механизм с наружным зацеплением; б — двусторонний храповой механизм с наружным зацеплением; в — односторонний храповой механизм с внутренним зацеплением.
Кулисный механизм (рис. 6, а) наиболее часто применяют для преобразования вращательного движения кривошипа 1 в качательное движение кулисы 3. Камень кулисы 2 перемещается вдоль нее по направляющим. Кулисные механизмы могут быть использованы также для преобразования равномерного вращательного движения в неравномерное вращательное движение при а 2 + r 2 +2 a r cos b)

где w3 = d a/dt ; w1 = d b/dt = const. Отсюда передаточное отношение
i12 = w1 /w2 = ( a 2 + r 2 + 2 a r cos b )/[r(a cos b + r)]. Диффе ренцируя по времени выражение для w 3 , получаем угловое ускорение кулисы e3 =d 2 a/dt 2 . . После преобразований

Наиболее характерным является применение кулисных механизмов в устройствах для получения прерывистого движения, например в разнообразных производственных автоматах, работающих по определенному циклу, в киноаппаратуре и др. В таких устройствах используют мальтийский крест (рис. 6, в). Лопасти 2 креста, имеющие пазы, представляют собой кулисы. Число лопастей не менее 3. При вращени и кривошипа 4 поворот креста происходит только тогда, когда цевка 3 кривошипа перемещается в пазу лопасти креста. Крест поворачивается на угол 2a при повороте кривошипа на угол 2b. На угле поворота кривошипа 2p—2b крест неподвижен. Характер изменения кинематических параметров движения креста (рис. 6, в) — угла поворота a, угловой скорости w и углового ускорения e — показан на рис. 6, г.
За долгий период развития индустрии по производству механизированного оборудования было создано довольно большое количество устройств, которое может применяться для передачи усилия. Примером можно назвать храповой механизм. Он считается одним из старейших изобретений человека, так как конструкция достаточно проста и эффективна, оно считается актуальным на сегодняшний день. Рассмотрим все его особенности подробнее.

Конструкционное исполнение
Классический храповый механизм предназначен для передачи прерывистого вращения в одном направлении. Чаще всего устанавливается для зубчатого колеса. Рассматриваемое устройство храпового механизма характеризуется следующими особенностями:
- При изготовлении заготовки применяется технология литья и ковки. За счет этого обеспечивается высокая степень надежности.
- Наиболее важной частью любого устройства можно назвать зубчатые колеса. Они представлены колесами из металла, на поверхности которого есть зубья.
- Количество зубьев на поверхности зависит от целевого предназначения механизма. Как показывает практика, чаще всего встречается вариант исполнения с 12 зубьями для 30-градусного поворота.
- Для стяжных ремней-передач часто устанавливается вариант исполнения, который имеет только 6 зубьев.
Еще одним важным конструктивным элементом можно назвать собачку. Она выступает в качестве стопорного элемента. Основные свойства элемента и его схема расположения, определенные функции и размеры во многом зависят то конкретной модели и ее области применения.

Как работает храповый механизм
Распространение храпового механизма можно связать с достаточно простым механизмом и принципом действия, за счет чего обеспечивается длительный срок эксплуатации. Храповик как деталь во многом напоминает трещоточный элемент, так как во время работы возникает соответствующий звук. К особенностям принципа работы отнесем следующие моменты:
- Основная деталь представлена крюком, рычагом или приводом. Спусковой элемент приводит всю систему в действие.
- Вначале работы собачка находится в зацеплении с колесом, но после активации механизма основной элемент совершает осевое вращение. При этом фиксатор смещается на небольшое расстояние относительно первоначального расположения.
- Тяга может быть представлена различными механизмами. Часто можно встретить наличие механизма, который обеспечивает регулировку силы.
- На момент осевого вращения собачка скользит по поверхности. Из-за прерывистого движения в некоторых случаях использовать рассматриваемый механизм не возможно, так как возникает сильный гул.
- Собачка, которая необходима для обеспечения функциональности устройства, на момент остановки осевого вращения западает в специальный паз, за счет чего осуществляется фиксация основной детали.

Основной цикл может повторяться до того момента, пока не будет достигнут требуемый результат. Примером можно назвать подъем устройства и некоторые другие цели.
Область применения
Сегодня храповик как деталь применяется при создании различных промышленных агрегатов с компонентами инженерных конструкций. При этом может обеспечиваться стабильная работа различных небольших элементов инструментов. Этот момент указывает на универсальность применения храповых механизмов.
С точки зрения технической интеграции устройство обходит многие другие варианты исполнения.
Простейший храповая деталь позволяет проводить регулировку расположение оголовки и его фиксацию.
Очень часто производители используют храповик в качестве элемента, через который проводится установка рабочих параметров. Примером можно назвать фиксацию шага реза в определенном диапазоне. Кроме этого, установка проводится при непосредственном изготовлении станочного оборудования.



В последнее время установка проводится в станках для круглой шлифовки, устройство обеспечивает радиальную подачу. Встречается механизм в домкратах и различных лебедочных системах, заводных автомобилях и других устройствах.
Разновидности механизма
В продаже встречаются самые различные фрикционные храповые механизмы. Они могут применяться для реализации самых различных задач. Среди особенностей проводимой классификации отметим следующие моменты:
- Профилированная поверхность часто изготавливается в виде барабана или рейки.
- Реечный вариант исполнения встречается крайне редко, так как функциональность устройства существенно снижается. Барабанные фрикционные храповые механизмы встречаются намного чаще по причине компактности и других свойств.
- Профиль основы также классифицируется по большому количеству признаков. Чаще всего встречаются радиальные, прямоугольные и пологе варианты исполнения. Радиальные получили широкое распространение, так как они компактные и просты в установке.
В большинстве случаев зуб имеет классическую форму, за счет чего обеспечивается надежность работы.
Особенности работы двунаправленных механизмов
Многие храповые механизмы характеризуются тем, что вращение колеса или рейки проводится только в одном направлении. Также стали производить варианты исполнения, которые могут вращаться в обоих направлениях. Ключевыми моментами можно назвать следующее:
- Вращение реализуется влево и направо. Именно этот момент существенно повышает функциональность устройства.
- Форма зубцов прямоугольная. Только за счет этого обеспечивается равномерное вращение колеса в обоих направлениях.
- Ключевая особенность также заключается в том, каким образом работает фиксирующая собачка. Она на момент вращения основного элемента не перескакивает, а приподнимается. За счет этого устройство становится более функциональным, но при этом и менее надежным.
Область применения подобного элемента сегодня получил весьма широкое распространение. При его изготовлении могут применяться самые различные материалы, в большинстве случаев уделяется внимание вариантам исполнения с повышенной коррозионной стойкостью.
Как самостоятельно изготовить храповик?
Для того чтобы существенно сэкономить на создании механизма можно изготовить храповик своими руками. Расчет храпового механизма проводится в зависимости от требований, которые предъявляются к системе. Изготовить храповый механизм своими руками можно следующим образом:
- В качестве основного элемента можно использовать металлическую трубу. На используется для создания вала, который будет применяться для непосредственной передачи вращения. При выборе трубы следует уделить внимание тому, чтобы толщина стенки была требуемой величины. В противном случае он не сможет выдержать требуемую нагрузку.
- Из стального листа вырезается небольшой кусок профиля, который играет роль фиксирующей детали. Рекомендуется уделять внимание сплавам с повышенной прочностью и износостойкостью. В большинстве случаев уделяется внимание варианту исполнения, который прошел закалку для повышения твердости поверхностного слоя.
- Больше всего проблем возникает в случае подгонки основных элементов друг к другу. Только в этом случае устройство будет работать правильно. Именно поэтому при работе приходится использовать точные измерительные инструменты. Примером можно назвать микрометр или штангенциркуль.
- Несущая база изготавливается из металлических листов, которые соединяются между собой при применении технологии сварки. Подобная база создается в зависимости от особенностей будущей конструкции.
- Колесо должно иметь на рабочей поверхности зубья, за счет которых обеспечивается зацепление. Этот элемент соединен с валом зачастую при помощи шпонки, которая характеризуется высокой надежностью. Колесо изготовить самостоятельно достаточно сложно, так как поверхностный слой должен характеризоваться высокой надежностью и прочностью. Чаще всего храповое колесо снимается с других механизмов или заказывается у мастера, который предоставляет соответствующие услуги.
- Вал крепится посредством сварки. Подобный тип соединения характеризуется повышенной прочностью и длительным эксплуатационным сроком. Нужно уделять довольно много внимания качеству сварочного шва, так как даже незначительные дефекты могут стать причиной возникновения существенных проблем. Собачка изготавливается при применении пружины и ходового элемента. Пружину можно снять с других механизмов, ходовая деталь отвечает за смещение собачки относительно зуба.

В целом можно сказать, что процесс изготовления рассматриваемой конструкции характеризуется довольно большим количеством сложностей. Только при наличии требующихся навыков и инструментов можно достигнуть поставленных задач. Храповой механизм чертеж можно скачать в интернете. При применении правильно разработанного проекта может быть уверенным в том, что все детали идеально подойдут друг к другу.
Расчет храпового механизма
При рассмотрении того, как работает храповый механизм следует уделить внимание тому, что самое опасное положение, когда вершина собачки упирается в вершину зуба. Подобное явление становится причиной возникновения сильного удара, за счет которого механизм изнашивается довольно быстро. Среди особенностей проводимых расчетов отметим следующее:
- Проводится расчет прочности кромок.
- Определяется окружная сила.
При проектировании могут применяться самые различные формулы, а некоторая информация берется из таблиц.
Расчет храпового механизма создает довольно много трудностей, так как в некоторых случаях выбирается требуемый параметр в зависимости от условий эксплуатации.
Расчет храпового колеса
Провести расчет храпового колеса можно самостоятельно. Среди особенностей процедуры отметим нижеприведенные моменты:
- Во все случаях проводится расчет коэффициента, который представлен соотношение ширины зуба к показателю модуля. Большие значения применяются для устройств, во время работы которых может возникать существенная ударная нагрузка. Ширина собаки составляет 2-4 мм, за счет чего компенсируется вероятность неточности проведения монтажных работ.
- При расчетах могут применяться самые различные формулы, все зависит от того, какие данные известны в начале расчетов.
- Проводится расчет сопротивления на изгиб при рассмотрении зуба как балки, так как на него будет оказываться высокая нагрузка.

Можно встретить просто огромное количество различных формул, которые могут применяться при проведении расчетов.
Расчет собачки храпового механизма
Устанавливаемая собачка храповика выступает в качестве важного элемента конструкции. Среди особенностей его изготовления отметим нижеприведенные моменты:
- При создании подвижной собачки механизма применяется сталь 40Х, которая дополнительно обрабатываются термическим методом для повышения твердости. Рассматриваемый материал после термической обработки становится более защищенным от воздействия окружающей среды.
- Для обеспечения надежной фиксации применяется специальная пружина или вес.
- При установке собачки уделяется внимание тому, что ось ее вращения располагается так, чтобы ее контактная поверхность соприкасалась с зубом под углом 90 градусов или близким к нему. За счет этого обеспечивается более высокая надежность фиксации.

Работа рассматриваемого устройства определяет то, что не приходится выполнять периодической обслуживание. При длительной эксплуатации есть вероятность быстрого износа поверхности. Кроме этого, со временем пружина может потерять свои основные свойства.
В различных машинах для их нормального функционирования используется не только непрерывное, но и прерывистое вращательное движение. Для того чтобы его осуществлять, используются специализированные механизмы, называемые храповыми.
В технике храповыми механизмами принято называть такие кинематические устройства, которые используются для того, чтобы преобразовывать возвратно-вращательное движение в движение прерывистое вращательное, имеющее одно направление. Отличительной особенностью храповых механизмов является то, что они позволяют производить изменение величины периодических перемещений рабочих частей станков и машин различного назначения, причём в весьма широком диапазоне и достаточно тонко.

Храповой механизм можно охарактеризовать, как устройство которое периодически создаёт препятствие воздействию силы на механизм и снова создаёт условия для его движения. Кроме того, их применяют с целью устранения возможности перемещения каких-либо звеньев машин и механизмов в одном направлении. Еще одно назначение храповых механизмов состоит в том, чтобы давать связанным между собой звеньям возможность свободно поворачиваться в одном направлении. Все храповые механизмы подразделяются на зубчатые и фрикционные.
Зубчатые храповые механизмы
Фрикционные храповые механизмы
Фрикционные храповые механизмы в современной технике получили весьма широкое распространение. Они подразделяются на колодочные, кулачковые и роликовые.
Чаще всего фрикционные храповые механизмы используются тогда, когда нужно обеспечить надежное сцепление различных элементов при значительных скоростях, причем в любом их угловом положении друг относительно друга. Движение в одном определенном направлении в таких механизмах выполняется за счет того, что при заклинивании промежуточных звеньев фрикционных обойм возникает большая сила трения.
Применение храповых механизмов
Сфера применения храповых механизмов различных типов и конструкций весьма широка. Чаще всего их используют в самом разнообразном станочном оборудовании. К примеру, без храповых механизмов с наружным храповым колесом не обходится практически ни один современный поперечно-строгальный станок. В продольно-строгальном оборудовании обычно используются механизмы с торцевыми храповыми муфтами. Их устанавливают в приводах подач. В конструкции некоторых круглошлифовальных станков применяются храповые механизмы с поршневыми приводами. Они монтируются в системах радиальных подач.
Помимо станкостроения храповые механизмы используются также в приборостроении, автомобилестроении, авиастроении. Их часто можно встретить в различных отсчетных устройствах, заводных механизмах, стартерах, лебедках, домкратах и т.п.
В машиностроении подобные устройства относятся к классу механизмов свободного хода (МСХ) (англ. Freewheel mechanism). Механизмы свободного хода обеспечивают, подобно диодам в электронике, передачу крутящего момента только в одном направлении.
Храповой механизм состоит из двух основных деталей:
1. Собачка (англ. pawl — защелка, фиксатор, стопор) – деталь, которая обеспечивает непрерывное линейное или вращательное движение в прямом направлении, но блокирует обратное движение. При прямом движении рейки или зубчатого колеса собачка скользит по зубчикам, не препятствуя движению. При смене направления движения собачка упирается в деталь, мешая обратному ходу. Иногда собачку называют палом, стопором, защелкой.
2. Зубчатое колесо (шестеренка) или зубчатая рейка – деталь с зубчиками, которые, как правило, скошены в обратную сторону от направления свободного движения шестеренки или рейки. Несимметричные зубчики улучшают скольжение собачки, уменьшают шумность и обеспечивают надежное зацепление при движении в обратную сторону.
Чтобы механизм работал в любом положении, собачку прижимают к зубчикам с помощью пружины, упругой пластины или резинки. Без дополнительных деталей собачка прижимается только за счет силы тяжести.
Принцип действия
Во время движения зубчатой детали в прямом направлении собачка скользит по верхушкам зубчиков. Когда собачка соскакивает с зубчика на зубчик, часто можно услышать характерный звук трещотки. Каждый, кто ездил на современном велосипеде, слышал этот звук во время движения накатом.
Во время смены направления движения рейки или зубчатого колеса, собачка упирается в крутой склон зубчика и не дает детали свободно поворачиваться в этом направлении.
Как говорят инженеры, уникальность храповых механизмов свободного хода по сравнению с остальными МСХ заключается в замыкании механического диода под действием тангенциальных сил (лат. tangens — касательный), т.е. действующих по касательной к храповику. Остальные МСХ (шарикового, роликового, сухарного типа) действую по принципу фрикционного клинового замыкания.
Ниже приведен пример работы линейного храпового механизма с зубчатой рейкой вместо зубчатого колеса.
Люфт
Люфт – зазор, свободный ход одной детали относительно другой. В храповом механизме с зубчатой рейкой или шестеренкой максимальный люфт — это расстояние от одного зубчика до другого.
История
Храповой механизм начали использовать в технических устройствах давным-давно. В Древней Греции инженеры использовали зубчатую рейку со стопорной защелкой в механизме заряжания гастрафета.

Древнегреческий гастрафет
Большие и тяжелые парусные корабли, бороздящие моря и океаны, издревле начали оснащаться шпилем, или кабестаном (франц. cabestan). Шпиль (кабестан) представляет собой корабельный механизм типа ворот для наматывания цепи или каната на барабан. Шпиль используется для опускания или поднятия якоря (якорный шпиль), а также для швартовки корабля к пристани (швартовочный шпиль).
Некоторые шпили могли оснащаться храповым механизмом для предотвращения нежелательного разматывания якорной цепи или швартовочного троса.
Примеры использования
Торцевые гаечные ключи и отвертки
Торцевые гаечные ключи, оснащенные храповым механизмом, ещё называют трещотками. В самом простом варианте конструкции в трещотку стовят по две собачки. Поворотом рычажка можно либо отворачивать гайку, либо её закручивать, не вынимая ключа на каждом обороте, как с обычным инструментом.
Кабельные стяжки
Кабельные стяжки делают из пластика одной деталью. Собачка прижимается к зубчатой пластине силой упругости. После затягивания стяжка не ослабляется даже при очень большом усилии.
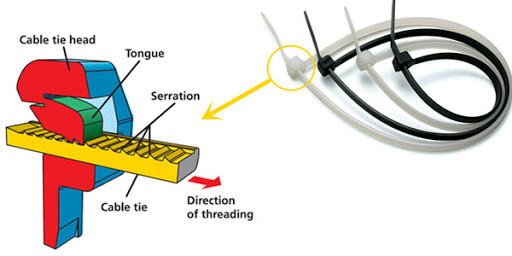
Храповой механизм кабельной стяжки
Противооткатные устройства
Позже эта схема нашла применение на американских горках, чтобы в случае отключения электричества поезд с любителями острых ощущений не покатился назад.
Противооткатное устройство тележки на американских горках
Лебедки
Лебедки – это механизм для перемещения предметов с помощью каната. Электрическую лебедку устанавливают во внедорожники, чтобы вытянуть из трясины застрявший автомобиль.
Чтобы натянутый трос не разматывался с барабана используют храповой механизм. Примеры его использования на ручных лебедках можно увидеть на этих фотографиях.
Обгонная муфта велосипеда
Обгонную муфту (англ. overrunning clutch) также называют муфтой свободного хода. Она позволяет предотвратить передачу крутящего момента от ведомого вала (колеса) к ведущему (на цепь и педали), если ведомый вал начинает вращаться быстрее. Например, после прекращения вращения педалей без муфты свободного хода колеса продолжали бы раскручивать цепь и педали, как это было в первых велосипедах. То же самое было бы при спуске с горки.
Впервые обгонную муфту с простейшим храповым механизмом запатентовал в 1869 году Уильям Ван Анден из Покипси, штат Нью-Йорк, США. В обгонной муфте Ван Андена храповик был встроен в ступицу переднего колеса велосипеда.
Почти все современные велосипеды – заднеприводные. Обгонная муфта в них встраивается в заднюю втулку или заднюю звездочку. Обгонные муфты с храповым механизмом издают характерный звук и их еще называют велотрещотками.

Муфта свободного хода с храповым механизмом в задней звездочке велосипеда
Обгонная муфта стартера автомобиля
Механизм свободного хода с храповиком используется в стартерах автомобилей как защитное устройство. Стартер – это механизм, который с помощью электромотора запускает двигатель внутреннего сгорания, вращая его коленвал через маховик.
Скорость вращения ведомого зубчатого колеса стартера невысокая – может быть около 3000 об/мин. После запуска двигатель на холостом ходу развивает около 1000 об/мин. Но передаточное отношения стартер-маховик из-за разности диаметров зубчатых колес может достигать значения 20:1. Т.е. запущенный двигатель на холостых оборотах может раскрутить электромотор стартера до 20 000 об/мин.
Чтобы стартер не вышел из строя после запуска двигателя на него ставят обгонную муфту.

Стартер автомобиля
Коробка передач автомобиля
В данном примере собачка храпового механизма используется для перевода автоматической коробки передач в режим парковки.
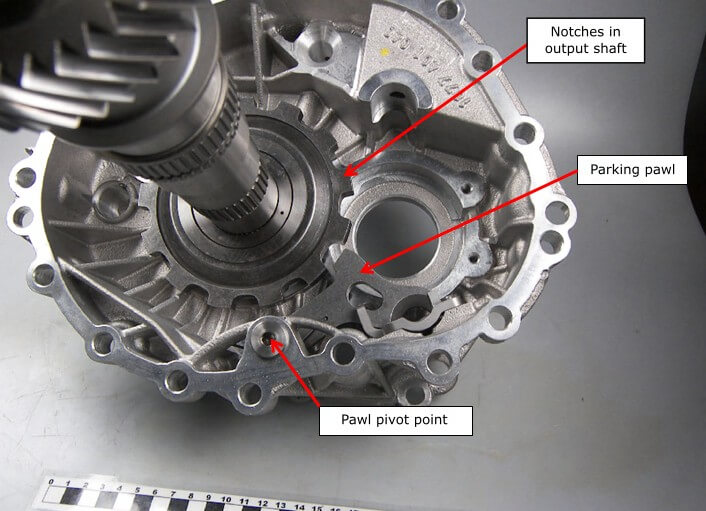
Храповик в автоматической коробке передач автомобиля
Другие конструкции механизмов свободного хода (МСХ)
Вместо собачки в конструкции механизма свободного хода могут использовать шарикоподшипники, ролики, сухари или иные детали, блокирующие вращение в обратную сторону.
Храповой механизм из образовательного конструктора Lego
С помощью образовательных конструкторов можно собирать модели с храповым механизмом. В данном примере храповик собран из стандартного зубчатого колеса и собачки, состоящей из трех деталей (штифта, красного фиксатора и короткой оси). Зубчатое колесо приводится в движение ручкой. Важно подобрать такой угол собачки относительно зубчатого колеса, чтобы происходил надежный зацеп при обратном вращении.

В следующем примере перекидная собачка используется в модели механического вентилятора, собранного из набора Lego Education EV3. В момент поднятия груза храповой механизм препятствует случайному разматыванию нити. Далее собачка перекидывается на другую сторону, чтобы не мешать работе вентилятора.

Механический вентилятор из Lego EV3
В примере с катапультой на противоположном конце от собачки установлен длинный рычаг. Под весом длинного конца рычага собачка упирается в зубчатое колесо и блокирует вращение оси. Катапульта выстрелить не может. Стоит надавить на длинный рычаг вверх и собачка выйдет из зацепления, разблокировав ведущую ось.

Механическая катапульта из Lego EV3
Читайте также: