
Реферат на тему робототехника и системы автоматического управления
Обновлено: 07.07.2024
Современный человек в наши дни с трудом может представить свою обыденную жизнь без привычных удобств – результатов многочисленных достижений науки и техники. 21 век – эпоха бесчисленных возможностей , коммуникаций и новых технологий ; это такой период человеческой истории , когда с каждым годом жизнь людей значительно облегчается , все процессы механизируются ,прилавки супермаркетов заполняются экзотической пищей, в торговых комплексах появляются одежды из новейших материалов, а в гипермаркетах электроники и того дальше, невозможно угнаться за развитием новых изобретений.
Содержание работы
1)Раскрытие понятия и общие характеристики
4)Использование в промышленности
Файлы: 1 файл
Государственный университет управления.docx
Государственный университет управления
Институт инновационного управления экономикой
Кафедра управления инновациями в реальном секторе экономики
Работу выполнила студентка
Наумова Ирина Анатольевна
1)Раскрытие понятия и общие характеристики
4)Использование в промышленности
Современный человек в наши дни с трудом может представить свою обыденную жизнь без привычных удобств – результатов многочисленных достижений науки и техники. 21 век – эпоха бесчисленных возможностей , коммуникаций и новых технологий ; это такой период человеческой истории , когда с каждым годом жизнь людей значительно облегчается , все процессы механизируются ,прилавки супермаркетов заполняются экзотической пищей, в торговых комплексах появляются одежды из новейших материалов, а в гипермаркетах электроники и того дальше, невозможно угнаться за развитием новых изобретений. Все привычное старое стремительно сменяется на необыкновенное, новое, к которому так не просто привыкнуть.
1)Раскрытие понятия и общие характеристики
Робототехника (от робот и техника; англ. robotics) — прикладная наука, занимающаяся разработкой автоматизированных технических систем.
Робототехника опирается на такие дисциплины как электроника, механика, программирование. Выделяют строительную, промышленную, бытовую, авиационную и экстремальную (военную, космическую, подводную) робототехнику.
В свою очередь робот (чеш. robot, от robota — подневольный труд или rob — раб) — автоматическое устройство, предназначенное для осуществления производственных и других операций, обычно выполняемых человеком (иногда животным). Использование роботов позволяет облегчить или вовсе заменить человеческий труд на производстве, в строительстве, при рутинной работе, при работе с тяжёлыми грузами, вредными материалами, а также в других тяжёлых или небезопасных для человека условиях.
Робот построен по компьютерной технологии, сознание робота - это вычислительная машина, с которой информация может быть считана и перенесена на отдельный носитель. Робот не лечится, а ремонтируется путем ввода соответствующих диагностических программ.
У робота отсутствует ассоциативное мышление. У него отсутствует любопытство – есть лишь программа по накоплению информации, которая ему необходима. Робот все понимает умом, душевные качества ему не присущи – все-таки он не имеет души.
-ходить, бегать, подниматься по лестницам, перепрыгивать препятствия высотой до полуметра
-танцевать, ходить на лыжах, играть в футбол, кидать дротики;
-играть в шахматы, на музыкальных инструментах, дирижировать оркестром;
-делать уколы и хирургические операции;
-распознавать и синтезировать человеческую речь, вести беседу, пожимать руки, улыбаться;
-убираться по дому, выполнять функции секретаря, следить за детьми и животными, смешивать коктейли, подавать на стол;
-охранять дом, драться с другими механизмами.
Психологи установили, что идеальный робот-андроид не должен превышать ростом 1 метр 30 сантиметров. Более высокие механизмы уже вызывают у людей опасение.
Существуют следующие типы роботов, помимо андроидов :
Роботы , обеспечивающие безопасность
Одним из самых ярких примеров является Р-БОТ 001 — робот, использующийся для охраны общественного порядка в Перми с июня 2007 года. Разработан московской компанией Лаборатория Трёхмерного Зрения. Робот способен вести наблюдения за улицами города, выявлять правонарушения и обращаться к гражданам с призывами соблюдать закон.
Боевым роботом называют автоматическое устройство, заменяющее человека в боевых ситуациях или при работе в условиях, несовместимых с возможностями человека, в военных целях: разведка, боевые действия, разминирование и т. п. Боевыми роботами являются не только автоматические устройства с антропоморфным действием, которые частично или полностью заменяют человека, но и действующие в воздушной и водной среде, не являющейся средой обитания человека (авиационные беспилотные с дистанционным управлением, подводные аппараты и надводные корабли). В настоящее время большинство боевых роботов являются устройствами телеприсутствия, и лишь очень немногие модели имеют возможность выполнять некоторые задачи автономно, без вмешательства оператора.
Первые роботы-учёные Адам и Ева были созданы в рамках проекта Robot Scientist университета Аберистуита и в 2009 году одним из них было совершено первое научное открытие.
К роботам-ученым безусловно можно отнести роботов, с помощью которых исследовались вентшахты Большой Пирамиды Хеопса. С их помощью были открыты "дверки Гантенбринка" и "ниши Хеопса".
Также есть робот-игрушка, робот-официант, робот программа , робот хирург, робот экскурсовод , социальный робот транспортный робот и многие другие.
Идея искусственных созданий впервые упоминается в древнегреческом мифе о Кадме, который, убив дракона, разбросал его зубы по земле и запахал их, из зубов выросли солдаты, и в другом древнегреческом мифе о Пигмалионе, который вдохнул жизнь в созданную им статую — Галатею. Также в мифе про Гефеста рассказывается, как он создал себе различных слуг. Еврейская легенда рассказывает о глиняном человеке — Големе, который был оживлён пражским раввином (махараль ми-Праг) Йехудом Бен Бецалелем (1509-1609) при помощи каббалистической магии.Похожий миф излагается в скандинавском эпосе Младшая Эдда. Там рассказывается о глиняном гиганте Мисткалфе, созданном троллем Рунгнером для схватки с Тором, богом грома.
Очевидно, первыми прообразами роботов были механические фигуры, созданные арабским ученым и изобретателем Аль-Джазари (1136—1206). Так, он создал лодку с четырьмя механическими музыкантами, которые играли на бубнах, арфе и флейте.
Чертёж человекоподобного робота был сделан Леонардо да Винчи около 1495 года. Записи Леонардо, найденные в 1950-х, содержали детальные чертежи рыцаря, способного сидеть, раздвигать руки, двигать головой и открывать забрало. Дизайн скорее всего основан на анатомических исследованиях, записанных в Витрувианском человеке. Неизвестно, пытался ли Леонардо построить робота.
Конец XIX века — русский инженер Пафнутий Чебышёв придумал механизм — стопоход, обладающий высокой проходимостью.
1898 — Никола Тесла разработал и продемонстрировал миниатюрное радиоуправляемое судно.
1950-е — Для работы с радиоактивными материалами стали разрабатывать механические манипуляторы, которые копировали движения рук человека, находящегося в безопасном месте.
1960 — Дистанционно управляемая тележка с манипулятором, телекамерой и микрофоном применялась для осмотра местности и сбора проб в зонах высокой радиоактивности.
1968 - Японская компания Kawasaki Heavy Industries, Ltd. получила лицензию на производство робота от американской фирмы Unimation Inc. и собрала своего первого промышленного робота. C тех пор Япония начала неуклонное движение к тому, чтобы стать мировой столицей роботов – с более чем 130 компаниями, вовлеченных в их производство. Изначально сконструированные в США, первые роботы Японии импортировались в малых количествах. Инженеры изучали их и применяли в производстве в таких специфических работах, как сварка и распыление. В 70-х годах были разработаны многочисленные возможности практического применения в данной области.
1979 — В МГТУ им. Н. Э. Баумана по заказу КГБ был сделан аппарат для обезвреживания взрывоопасных предметов — сверхлёгкий мобильный робот МРК-01.
1980– коммерческое начало для роботов, производимых на основе высоких технологий. С этого момента рынок начал расти, несмотря на обвал, произошедший в экономике Японии, и на то, что производство (в основном потребительская электроника) было перемещено за рубеж, что повлияло на уменьшение спроса внутри страны в 90-х годах. Постепенно японская экономика восстановилась, и с 2003 года опять наблюдается рост. В настоящее время на долю Японии приходится около 45% функционирующих в мире промышленных роботов. Если говорить об абсолютных цифрах, то к концу 2004 года в Японии было задействовано 356500 промышленных роботов, на втором месте со значительным отрывом шли Соединенные Штаты Америки (122000 промышленных роботов). Япония также занимает первое место в мире и по экспорту промышленных роботов. Ежегодно эта страна производит более 60 тысяч роботов, почти половина из которых идет на экспорт. Такой разрыв, безусловно, делает нашествие японских роботов еще более заметным.
1986 — в Чернобыле, впервые в СССР применены роботы для очистки радиоактивных отходов.
2007 — МВД России в г. Перми проводило испытания тестового робота- милиционера Р-БОТ 001
2010 — в Америке в продажу поступили новые персональные роботы PR2- четырёхколёсные (все ведущие и управляемые) устройства ростом немного ниже человека. Эти аппараты обладают двумя руками и способны выполнять самые различные действия.

Министерство образования и науки Российской Федерации
Федеральное государственное бюджетное образовательное учреждение
Высшего профессионального образования
Индивидуальная работа
на тему: Системы автоматического управления. Виды.
по дисциплине: Автоматика и робототехника
Выполнил студент гр. М08.19/17: _____________ Быстрицкий И.А.
подпись, дата
Проверил: ____________ Деренок А.Н.
Множество задач управления в современном мире связано с техническими системами – автомобилями, кораблями, самолетами, станками. Например, нужно поддерживать заданный курс корабля, высоту самолета, частоту вращения двигателя, температуру в холодильнике или в печи. Если эти задачи решаются без участия человека, говорят об автоматическом управлении.
Вторая половина ХХ века характерна появлением машин и систем высокой конструктивной сложности, способных выполнять ответственные задачи. К началу 50-х годов прошлого века практически закончилась механизация и автоматизация физического о труда человека. Более 99% объема работ выполнялось машинами. В это время человечество столкнулось с новой проблемой: физический труд человека стал выполняться машинами, а автоматизация умственной деятельности оператора (управленца) продолжала оставаться такой же, какой она была в течение последних 2000—2500 лет. Техника постоянно усложнялась, она выполняла все больше и больше функций, процессы управления становились все более сложными, а качество функционирования систем управления либо оставалось прежним, либо ухудшалось из-за усложнения производства. Решением этого противоречия стало естественное, объективное появление и становление во второй половине ХХ века новой научной дисциплины — теории автоматизированного управления как одного из разделов науки о закономерностях управления в технических, биологических, социальных и других классах систем.
Понятие и определение САУ
Система управления — систематизированный (строго определённый) набор средств сбора сведений о подконтрольном объекте и средств воздействия на его поведение, предназначенный для достижения определённых целей. Объектом системы управления могут быть как технические объекты , так и люди. Объект системы управления может состоять из других объектов, которые могут иметь постоянную структуру взаимосвязей.
САУ способны поддерживать экстремальное значение некоторого критерия (например, минимальное или максимальное), характеризующего качество функционирования данного объекта. Критерием качества, который обычно называют целевой функцией , показателем экстремума или экстремальной характеристикой , может быть либо непосредственно измеряемая физическая величина (например, температура , ток , напряжение , влажность , давление ), либо КПД , производительность и др.
В задачах управления всегда есть два объекта – управляемый и управляющий. Управляемый объект обычно называют объектом управления или просто объектом, а управляющий объект – регулятором. Например, при управлении частотой вращения объект управления – это двигатель (электромотор, турбина); в задаче стабилизации курса корабля – корабль, погруженный в воду; в задаче поддержания уровня громкости – динамик.
Автоматическое управление в технике, совокупность действий, направленных на поддержание или улучшение функционирования управляемого объекта без непосредственного участия человека в соответствии с заданной целью управления. САУ широко применяется во многих технических и биотехнических системах для выполнения операций, не осуществимых человеком в связи с необходимостью переработки большого количества информации в ограниченное время, для повышения производительности труда, качества и точности регулирования, освобождения человека от управления системами, функционирующими в условиях относительной недоступности или опасных для здоровья Цель управления тем или иным образом связывается с изменением во времени регулируемой (управляемой) величины — выходной величины управляемого объекта. Для осуществления цели управления, с учётом особенностей управляемых объектов различной природы и специфики отдельных классов систем, организуется воздействие на управляющие органы объекта — управляющее воздействие. Оно предназначено также для компенсации эффекта внешних возмущающих воздействий, стремящихся нарушить требуемое поведение регулируемой величины. Управляющее воздействие вырабатывается устройством управления (УУ). Совокупность взаимодействующих управляющего устройства и управляемого объекта образует систему автоматического управления.
Система автоматического управления (САУ) поддерживает или улучшает функционирование управляемого объекта. В ряде случаев вспомогательные для САУ операции (пуск, остановка, контроль, наладка и т.д.) также могут быть автоматизированы. САУ функционирует в основном в составе производственного или какого-либо другого комплекса
Задачи систем управления
Автоматические системы управления применяются для решения трех типов задач:
• стабилизация, то есть поддержание заданного режима работы, который не меняется длительное время (задающий сигнал – постоянная, часто нуль);
• программное управление – управление по заранее известной программе (задающий сигнал меняется, но заранее известен);
• слежение за неизвестным задающим сигналом.
К системам стабилизации относятся, например, авторулевые на кораблях (поддержание заданного курса), системы регулирования частоты вращения турбин. Системы программного управления широко используются в бытовой технике, например, в стиральных машинах. Следящие системы служат для усиления и преобразования сигналов, они применяются в приводах и при передаче команд через линии связи, например, через Интернет.
Одномерные и многомерные системы По количеству входов и выходов бывают
• одномерные системы, у которых один вход и один выход (они рассматриваются в так называемой классической теории управления);
• многомерные системы, имеющие несколько входов и./или выходов (главный предмет изучения современной теории управления).
Непрерывные и дискретные системы По характеру сигналов системы могут быть
• непрерывными, в которых все сигналы – функции непрерывного времени, определенные на некотором интервале;
• дискретными, в которых используются дискретные сигналы (последовательности чисел), определенные только в отдельные моменты времени;
• непрерывно-дискретными, в которых есть как непрерывные, так и дискретные сигналы. Непрерывные (или аналоговые) системы обычно описываются дифференциальными уравнениями. Это все системы управления движением, в которых нет компьютеров и других элементов дискретного действия (микропроцессоров, логических интегральных схем).
Существуют также и гибридные непрерывно-дискретные системы, например, компьютерные системы управления движущимися объектами (кораблями, самолетами, автомобилями и др.). В них часть элементов описывается дифференциальными уравнениями, а часть – разностными. С точки зрения математики это создает большие сложности для их исследования, поэтому во многих случаях непрерывно-дискретные системы сводят к упрощенным чисто непрерывным или чисто дискретным моделям.
Стационарные и нестационарные системы Для управления очень важен вопрос о том, изменяются ли характеристики объекта со временем. Системы, в которых все параметры остаются постоянными, называются стационарными, что значит «не изменяющиеся во времени Системы, в которых параметры объекта или регулятора изменяются со временем, называются нестационарными. Хотя теория нестационарных систем существует (формулы написаны), применить ее на практике не так просто.
Определенность и случайность Самый простой вариант – считать, что все параметры объекта определены (заданы) точно, так же, как и внешние воздействия. В этом случае мы говорим о детерминированных системах, которые рассматривались в классической теории управления. Тем не менее, в реальных задачах точных данных у нас нет. Прежде всего, это относится к внешним воздействиям. Например, для исследования качки корабля на первом этапе можно считать, что волна имеет форму синуса известной амплитуды и частоты. Это детерминированная модель. Так ли это на практике? Естественно нет. С помощью такого подхода можно получить только приближенные, грубые результаты. По современным представлениям форма волны приближенно описывается как сумма синусоид, которые имеют случайные, то есть неизвестные заранее, частоты, амплитуды и фазы. Помехи, шум измерений – это тоже случайные сигналы. Системы, в которых действуют случайные возмущения или параметры объекта могут изменяться случайным образом, называются стохастическими (вероятностными). Теория стохастических систем позволяет получать только вероятностные результаты. Например, нельзя гарантировать, что отклонение корабля от курса всегда будет составлять не более 2° , но можно попытаться обеспечить такое отклонение с некоторой вероятностью (вероятность 99% означает, что требование будет выполнено в 99 случаях из 100).
По характеру изменения управляющего воздействия различают системы автоматической стабилизации, программного регулирования и следящие системы. По виду передаваемых сигналов выделяют системы непрерывные, с гармонической модуляцией, импульсные, релейные и цифровые. По способу математического описания, принятого при исследовании, выделяют линейные и нелинейные системы. Обе группы могут быть представлены непрерывными, дискретными и дискретно-непрерывными системами. По виду контролируемых изменений своих свойств различают не приспосабливающиеся и приспосабливающиеся (адаптивные) системы. В последнем классе можно выделить самонастраивающиеся системы с самонастройкой параметров или воздействий и самоорганизующиеся системы с контролируемыми изменениями структуры.
В зависимости от принадлежности источника энергии, при помощи которого создаётся управляющее воздействие, системы могут быть прямого и непрямого действия. В системах прямого действия используется энергия управляемого объекта. К ним относятся простейшие системы стабилизации (уровня, расхода, давления и т.п.), в которых воспринимающий элемент через рычажную систему непосредственно действует на исполнительный орган (заслонку, клапан и т.д.). В системах непрямого действия управляющее воздействие создаётся за счёт энергии дополнительного источника.
§ 25. Робототехника. Системы автоматического управления
В современном мире использование роботов стало обыденным явлением. По квартирам ползают роботы-пылесосы. На автомобилях и самолётах автопилоты-роботы ведут управление по круиз-контролю. Готовят пищу роботы-хлебопечки и роботы-мультиварки.
Что такое робот? Какие роботы бывают? Как ими управлять и как создать робота самому? В какой момент наши добрые помощники – пылесос, автомобиль, кофеварка – так поумнели, что превратились из просто агрегатов в наших интеллектуальных друзей? Чем отличается робот от неробота?
Рассмотрим в качестве примера обычную радиоуправляемую машинку (рис. 1). Она не является роботом, так как сможет поехать вперёд-назад и в сторону только после того, как на пульте нажмут рычажок в нужную сторону. Хотя команды движения и приходят на машинку по радиоканалу, но машинка не анализирует ситуацию и не принимает никаких решений.

Рис. 1. Радиоуправляемая машинка
Если рассмотреть управляемый с подобного пульта и тоже по радио каналу квадрокоптер, то его можно считать полноценным роботом (рис. 2). Это связано с тем, что на борту квадрокоптера стоит специальное устройство – чип-микропроцессор , в нём по заранее разработанной и за груженной в запоминающее устройство программе идёт анализ полученных команд, учитывается направление и скорость ветра, появление препятствия, рассчитываются изменения скорости вращения моторов.

Рис. 2. Радиоуправляемый квадрокоптер
Подумаем, когда становится роботом пылесос. Обычный включённый пылесос (рис. 3, а) будет долго шуметь, стоя на одном месте, если его никто никуда не передвинет. Но робот-пылесос в виде таблетки (рис. 3, б) сам передвигается от одной стены комнаты до другой, причём таким образом, что проходит над каждым участком пола не более чем 2 – 3 раза. Как это он делает? Откуда робот-пылесос берёт координаты и как запоминает свой путь?


Рис.3. Пылесос: а - обыкновенный; б - робот-пылесос
Вот как сам Карел Чапек это описывает: – «…в один прекрасный день … автору пришёл в голову сюжет … пьесы. И пока железо было горячо, он прибежал с новой идеей к своему брату Йозефу, художнику, который в это время стоял у мольберта… Автор изложил сюжет так коротко, как только мог…
– „Но я не знаю, – сказал автор, – как мне этих искусственных рабочих назвать. Я бы назвал их лаборжи [по-видимому, от английского слова labour – работники, трудящиеся, рабочая сила ], но мне кажется, что это слишком книжно“.
Назначения роботов могут быть самыми разнообразными, от увеселительных и прикладных и до сугубо производственных. Внешний вид роботов также может быть каким угодно, хотя нередко в конструкциях узлов заимствуют элементы анатомии различных живых существ, подходящие для выполняемой задачи.
Настоящий робот – это машина, которую можно обучить, т. е. подобно компьютеру запрограммировать (задать ему набор действий, которые он должен выполнять) делать разнообразные виды движений, реагировать на изменения в окружающем мире и выполнять множество видов работ и заданий.
Все роботы можно разделить на две большие группы:
• стационарные роботы на фундаменте, которые обычно используются в промышленности, на линиях сборки и сварки кузовных деталей автомобилей;
• мобильные роботы, которые могут перемещаться и выполнять работу везде, куда смогут добраться.
Мобильные роботы различаются по способу передвижения: есть передвигающиеся на колёсах или гусеницах, шагающие, плавающие и летающие.
Роботы могут выполнять различные функции.

Рис. 4. Сборочная линия с промышленными роботами
Медицинские роботы используются для выполнения хирургических операций, при этом применяются системы дистанционного слежения (рис. 5).
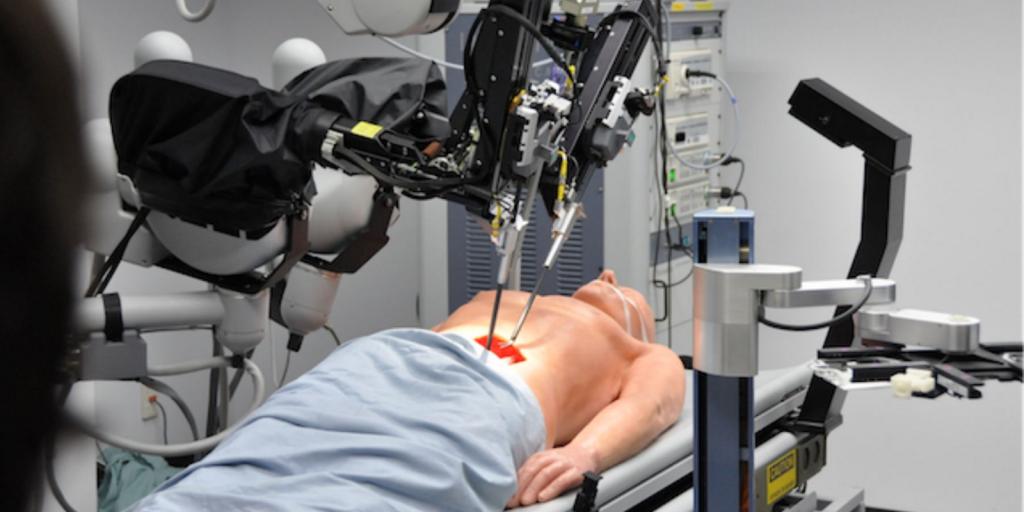
Рис. 5. Использование медицинских роботов в хирургии
К медицинским роботам относятся экзоскелеты, которые помогают людям передвигаться (рис. 6).

Рис. 6. Люди, использующие экзоскелеты
Роботы могут быть использованы в качестве протезов рук. Управлять электронными мышцами возможно уже сейчас, снимая датчиками сигналы с мышц человеческого тела. Наука, занимающаяся подобными проблемами, называется бионика.
Сельскохозяйственные роботы используются в растениеводстве и животноводстве (рис. 7). Они помогают кормить животных, удобрять и поливать растения, возделывать почву.

Рис. 7. Роботы, используемые в растениеводстве
Подводные роботы используются в морском деле для проведения аварийно-спасательных работ и различных исследований на дне моря (рис. 8).

Рис. 8. Подводный робот
Работа таких роботов осложняется тем, что ими невозможно управлять дистанционно, по радиоканалу. Радиоволны очень плохо распространяются в водной среде, поэтому таких автономных роботов надо заранее тщательно программировать, чтобы они смогли выполнить поставленную задачу и вернуться на базу самостоятельно.
Первым космическим роботом можно считать луноход, отправленный на Луну ещё во времена СССР — в далёком 1970 году (рис. 9)
Рис. 9. Советский луноход
Робот был отправлен и к комете Чурюмова — Герасименко. Он проводил исследования поверхности в точке высадки, брал пробы грунта и анализировал их прямо на месте, передавая на Землю в цифровом виде данные о составе почвы и поверхности, на которой он работал.
Сервисные роботы помогают нам в повседневной жизни. К ним, например, относится робот-пылесос. В местах большого скопления людей используют роботы телеприсутствия (рис. 11), которые помогают сориентироваться, подсказывают, куда сейчас стоит сходить, и отвечают на вопросы посетителей.
Рис. 11. Робот телеприсутствия
В школе такие роботы телеприсутствия помогут ребятам, которые не пришли в школу, почувствовать себя в коллективе, побродить на переменке по коридорам, пообщаться с друзьями, получить задания на дом или пойти с одноклассниками в музей (рис. 12).

Рис. 12. Робот в музее
Самым известным шагающим сервисным роботом является японский робот Асимо (рис. 13). Такие роботы уже используются в некоторых кафе как разносчики заказанной еды.
Рис. 13. Японский робот Асимо
К сервисным роботам можно отнести систему круиз-контроля в автомобилях. Причём если раньше такие системы только поддерживали определённую скорость при движении по трассе, то сейчас появились значительно более умные системы круиз-контроля, которые определяют ещё и расстояние до идущего впереди автомобиля и позволяют двигаться со скоростью, задаваемой лидером в колонне.
Программу в робот загружают. Способы загрузки бывают разные, например с помощью специального устройства – программатора – или по радиоканалу. Загрузка программы в постоянную память устройства ещё называется прошивкой устройства.
Когда робот выключен, загруженная в него программа хранится в ПЗУ. Как только на робот подаётся питание, процессор отправляет программу из постоянной в оперативную память и запускает выполнение программы.
Таким образом, роботом называют такое устройство, которое можно запрограммировать на выполнение каких-то действий.
Роботом можно считать современный гугл-автомобиль , на который уже установлен бортовой вычислительный комплекс и активный круиз-контроль. Такой автомобиль может не только сохранять постоянную скорость на трассе, но и оставлять неизменным расстояние до впереди идущего автомобиля и реагировать в автоматическом режиме на внезапно появляющееся препятствие.

Рис. 14. Контроллер
Во все планшеты, телефоны и другие гаджеты встроены контроллеры. Контроллеры отличаются друг от друга размерами, мощностью (которая определяет, какое количество операций может выполняться), рабочей частотой (скоростью выполнения операций).
Главная часть любого контроллера – микропроцессор.
Рис. 15. Микропроцессоры
Это арифметико-логическое устройство, которое производит арифметические и логические операции с двоичными числами (об этом мы будем говорить, когда станем рассматривать команды, которые понимают роботы).
Электроника в робототехнике
Приведите примеры электронных устройств, которыми вы пользуетесь в школе и дома. Как вы думаете, нужна ли для их работы электрическая энергия? Обоснуйте свой ответ.
Рассмотрим самую главную часть любого робота – контроллер.
Рис. 16. Принципиальная схема простейшего процессора
Сейчас процессор такой маленький, что даже в керамическом корпусе имеет размер, сравнимый с размером рисового зёрнышка, несмотря на то, что он состоит из огромного количества электронных компонентов. Принципиальная схема простейшего процессора имеет приблизительно такой вид, как показано на рисунке 16, а он умещается на кончике пальца (рис. 17).
Рис. 17. Микропроцессор и рисовое зернышко
Но процессоры не всегда были маленьких размеров.
Раньше вычислительные машины, выполняющие такие же операции, как микропроцессор, были огромного размера и занимали целый зал (рис. 18).

Рис. 18. Вычислительная машина второй половины XX в.
Основные понятия и термины:
роботы: стационарные, мобильные, промышленные, медицинские, подводные, сельскохозяйственные, космические, сервисные, шагающие, круиз-контроль; микропроцессор, постоянная память, оперативная память, контроллер.
? Вопросы и задания
1. Объясните, чем робот отличается от неробота. Верно ли, что радиоуправляемые игрушки – это настоящие роботы?
2. Какое устройство управляет всеми действиями робота? Для чего нужно большое количество разнообразных контроллеров?
3. Какую систему классификации вы можете предложить для роботов?
4. Каких роботов целесообразно использовать для работы на конвейере автомобильного предприятия (шагающих, стационарных, мобильных)?
5. Какими должны быть подводные роботы: программно управляемыми (автономными) или дистанционно управляемыми? Почему?
6. Что можно считать первым космическим роботом? Какие ещё космические роботы вам известны?
Придумайте и нарисуйте собственного робота. Дайте роботу имя, придумайте, что он будет делать, какие команды он сможет выполнять.


Робототехника в современном мире

Автор работы награжден дипломом победителя III степени
Текст работы размещён без изображений и формул.
Полная версия работы доступна во вкладке "Файлы работы" в формате PDF
Робототе́хника (от робот и техника ; англ. robotics — роботика , роботехника ) — прикладная наука , занимающаяся разработкой автоматизированных технических систем и являющаяся важнейшей технической основой развития производства.
Робототехника опирается на такие дисциплины:
Выделяют строительную, промышленную, бытовую, медицинскую, авиационную и экстремальную (военную, космическую, подводную) робототехнику.(Википедия)
В робототехнике соединяются механика, система управления и искусственный интеллект, поэтому она является важнейшим направлением научно-технического прогресса. Робототехнику требуются знания в вышеперечисленных дисциплинах, в результате робототехник, в отличие от узкого специалиста, обладает широким кругозором и системным мышлением.
Робот – устройство, управляемое с помощью электронной платы или компьютера, который можно запрограммировать на выполнение определенных операций. Он является электромеханическим, гидравлическим, пневматическим устройством или их сочетанием, в зависимости от сферы применения, предназначенный для замены человека или облегчения его труда.
Управление роботами делится на:
телеуправление – то есть с участием человека;
Существует три класса устройств робототехники, это сборные устройства, манипуляторы и уже готовые работы.
Системы управления робототехнических устройств строятся на том же техническом базисе, что и все другие автоматические устройства. В отличие от автоматов робот не просто следует заранее вложенному в него алгоритму, а способен воспринимать внешние сигналы и в соответствии с ними адаптировать свои действия в изменяющейся ситуации. Важно понимать, что на данный момент ещё нет универсальных роботов, которых можно было бы использовать для любой задачи. Инженеры-изобретатели разрабатывают и программируют роботов отдельно для каждой конкретной задачи.
По уровню применения робототехника подразделяется на:
Игровая робототехника может быть предназначена для детей и для взрослых. Игровая робототехника для детей направлена на выработку у них интереса к программированию и инженерным наукам. Игровая робототехника может быть полезна и для взрослых, так как её применение может способствовать выработке навыков поведения в типичных жизненных и опасных ситуациях.
В рамках обучающей робототехники используются робототехнические комплекты для детских, учебных и досуговых центров на базе Huna, Lego, Fishertechnik, Arduino. Например, компания LEGO выпустила первый робототехнический конструктор в рамках новой линейки конструкторов MINDSTORMS в 1998 году, открывая детям дверцу в волшебный мир роботов.
Актуальность темы.
В 21веке робототехника используется во всех видах промышленности, строительства, быта, авиации, особенно в экстремальных сферах деятельности человечества таких, как военная, космическая и подводная.
Цель реферата.
Целью реферата является рассмотрение видов и типов роботов, а также сферы их использования в современном мире.
Строительная робототехника.
Строительная робототехника, как это понятно из её названия, связана со сферой строительства. То есть работа идёт над разработкой роботов, которых можно будет использовать как при строительстве различных объектов, так и, что интересно, при их разрушении. Трудоёмкость обоих этих процессов высока, да и технологичность каждой операции процесса строительства должна быть на должном уровне. Поэтому использование роботов в этой сфере поможет соблюдать установленные технические стандарты и требования, а также может помочь максимально исключить ошибки, допускаемые из-за человеческого фактора.
Промышленная робототехника.
Промышленные роботы уже активно используются на заводах и фабриках, при производстве игрушек, чайников, мотоциклов, конфет, а также в производстве действительно сложных изделий, например, автомобилей. Роботы могут без помощи человека варить металл, штамповать, собирать по частям готовые продукты, всё это происходит благодаря особым конструкциям и программам, которые определяют функционал каждого робота. Говоря иными, а именно научными словами, такие устройства предназначены для автоматизации производства — изготовления чего-либо без помощи человека.
Бытовая робототехника.
Роботы для использования в домохозяйствах, включая персональных роботов, как правило, узкоспециализированные - каждый под какой-то один вид деятельности. В перспективе можно ожидать появления многофункциональных, универсальных роботов, способных выполнять различные виды деятельности. Жаргонное название - "домашники". Отличаются многообразием видов, в зависимости от назначения. Они могут быть: помощниками для пожилых людей, дворецкими, кухонными работниками, охранниками и т.д.
В данное время всё усиливается спрос на умные дома, они позволяют быстро реконфигурировать одно и то же помещение в соответствие с текущими задачами в режиме реального времени. Электроприводы, повинующиеся заложенной программе или нажатию кнопок в приложении, выдвигают из недр робо-комплекса кроватили или столы, настраивают конфигурацию шкафов и полок. А в роботизированном доме даже перегородки между комнатами могут передвигаться так, как нужно сейчас хозяину. Как в ручном режиме, так и автоматически, например, в таком доме занавески раздвинутся как раз тогда, когда хозяин встает, одновременно включится, например, кофеварка.
Медицинская робототехника.
Главной целью развития медицинской робототехники является высокая точность и повышение эффективности лечения, уменьшение рисков нанесения вреда здоровью человека. В настоящее время роботы играют колоссальную роль в развитии современной медицины. Они способствуют точной работе при операциях, помогают провести диагностику и поставить правильный диагноз. Заменяют отсутствующие конечности и органы, восстанавливают и улучшают физические возможности человека, снижают время на госпитализацию, обеспечивают удобство, быстроту реагирования и комфорт, экономят финансовые затраты на обслуживание. Вот некоторые роботы применяемые в медицине: роботы хирурги, роботизированные протезы, нанороботы и многие другие медицинские роботы.
Авиационная робототехника.
Авиация в плане роботизации не отстаёт от других сфер деятельности человека.
В нынешнее время очень популярным являются беспилотные летательные аппараты (БПЛА). БПЛА - беспилотный летательный аппарат военного назначения, разновидность военного робота. В задачу этих автономных систем, созданных для полёта, входит выполнение миссий, потенциально опасных для человека.
Также в авиации широко используются промышленные роботы, задействованные в производстве, обслуживании и ремонте самолётов.
Военная робототехника.
К группе военных роботов относят всевозможные беспилотные разведчики, машины для минирования и разминирования местности. Был разработан даже настоящий робот-медик. Называется этот робот Bloodhound, а предназначен он для оказания помощи раненым, к которым невозможно приблизиться врачам из-за сильного огня со стороны противника. Bloodhound оснащён видеокамерами, радиостанцией с микрофоном и динамиками, а также стетоскопом. Все эти элементы робота позволяют медикам дистанционно управлять им, проводить первичный осмотр раненого и даже беседовать с ним. После постановки диагноза Bloodhound может остановить кровотечение (например, наложить повязку на рану) и сделать назначенный укол, который позволит раненому дождаться эвакуации. Благодаря таким роботам можно спасти огромное количество человеческих жизней.
В 2004 российские инженеры создали робота, способного обнаруживать и обезвреживать взрывные устройства. Такой робот способен проникать и доставлять в труднодоступные зоны средства наблюдения и разведки, а также осматривать подозрительные объекты и в случае необходимости осуществлять их транспортировку до места назначения или разминирование. Робот может работать индивидуально или в группе таких же машин.
Космическая робототехника.
Космороботы – это роботы, приспособленные работать в космическом пространстве. Преимущество космических роботов перед человеком заключается в том, что они могут работать в крайне неблагоприятных условиях и обходиться без каких-либо ресурсов, так как в большинстве случаев они работают на солнечных батареях. Также гораздо легче будет пережить потерю такого робота, чем гибель астронавта. Обычно, задача косморобота заключается в проведении какой-нибудь научной деятельности. Вообще-то, тоже самое может сделать и обычный робот, работающий на земной поверхности, но к космороботу есть несколько основных требований, которым он должен соответствовать.
функционировать в сложных условиях враждебной среды;
весить как можно меньше;
потреблять мало энергии и иметь долгий срок службы;
работать в автоматическом режиме;
обладать чрезвычайной надежностью;
Для того, чтобы соответствовать всем этим требованиям, учёные создают все новые и новые устройства, механизмы, приводы, микроконтроллеры, обладающие высокой прочностью и использующим как можно меньше энергии. Эксперты подсчитали, что отправление на Марс человека будет стоить примерно 200-300 миллиардов долларов, при том, что это будет безвозвратное отправление. Еще придется потратить несколько месяцев на психологическую адаптацию участников экспедиции. А отправка корабля, на борту которого будет робот, обойдется примерно в 5-10 миллиардов долларов. Так что роботы в космосе обходятся намного дешевле, чем люди.
Подводная робототехника.
В современной жизни человек уже использует роботов во всех сферах своей деятельности. В большинстве своём роботы являются не заменимыми помощниками, но всё чаще они используются там, где человек справлялся без особого труда. Благодаря своему интеллекту человек развил науку, и смог создать робототехнику, но из-за своей лени он всё чаще стремится заменить свой труд роботами. Но и этого человеку мало, теперь человек пытается создать, для своих роботов, искусственный интеллект. С искусственным интеллектом роботы смогут самостоятельно оценивать происходящее вокруг них и принимать решения по действиям, которые им необходимо произвести. Человеку не надо уже будет тратить силы и время на подачу необходимых команд и алгоритмов. Но такое положение дел может привести к деградации человечества, а возможно и исчезновения, как вида, с лица земли. Вполне возможно, что великие достижения человеческого разума и человеческая лень, могут обернуться против самого человека.
Прейко М., Устройства управления роботами: схемотехника и программирование – М.: Издательство ДМК, 2004, 202с.
Роботехника - сравнительно новое и интенсивно развивающееся научное направление, вызванное к жизни необходимостью освоения новых сфер и областей деятельности человека, а также потребностью широкой автоматизации современного производства, направленной на резкое повышение его эффективности. Использование автоматических программируемых устройств - роботов - в исследовании космоса и океанских глубин, а с 60-х гг. нашего столетия и в производственной сфере, быстрый прогресс в области создания и использования роботов в последние годы обусловили необходимость интеграции научных знаний ряда смежных фундаментальных и технических дисциплин в едином научно-техническом направлении - робототехнике.
Идея создания роботов - механических устройств, своим внешним видом и действиями подобных людям или каким-либо живым существам, увлекала человечество с незапамятных времен. Даже в легендах и мифах человек стремился создать образ рукотворных существ, наделенных фантастической физической силой и ловкостью, способных летать, жить под землей и водой, действовать самостоятельно и в то же время беспрекословно подчиняться человеку и выполнять за него самую тяжелую и опасную работу. Еще в "Илиаде" Гомера (VI в. до н. э.) говорится о том, что хромоногий кузнец Гефест, бог огня и покровитель кузнечного ремесла, выковал из золота девушек, которые исполняли его поручения.
У современного человека эти "служанки" непременно ассоциируются с антропоморфными, т.е. созданными по образу и подобию человека, автоматическими универсальными устройствами - роботами.
Теория робототехники опирается на такие дисциплины, как электроника, механика, информатика, а также радиотехника и электротехника. Выделяют строительную, промышленную, бытовую, авиационную и экстремальную (военную, космическую, подводную) робототехнику.
Сегодня человечество практически вплотную подошло к тому моменту, когда роботы будут использоваться во всех сферах жизнедеятельности. Поэтому курсы робототехники и компьютерного программирования необходимо вводить в образовательные учреждения.
Изучение робототехники позволяет решить следующие задачи, которые стоят перед информатикой как учебным предметом. А именно, рассмотрение линии алгоритмизация и программирование, исполнитель, основы логики и логические основы компьютера.
Также изучение робототехники возможно в курсе математики (реализация основных математических операций, конструирование роботов), технологии (конструирование роботов, как по стандартным сборкам, так и произвольно), физики (сборка деталей конструктора, необходимых для движения робота-шасси).
Классы роботов
Манипуляционный робот — автоматическая машина (стационарная или передвижная), состоящая из исполнительного устройства в виде манипулятора, имеющего несколько степеней подвижности, и устройства программного управления, которая служит для выполнения в производственном процессе двигательных и управляющих функций. Такие роботы производятся в напольном, подвесном и портальном исполнениях. Получили наибольшее распространение в машиностроительных и приборостроительных отраслях.

Мобильный робот — автоматическая машина, в которой имеется движущееся шасси с автоматически управляемыми приводами. Такие роботы могут быть колёсными, шагающими и гусеничными (существуют также ползающие, плавающие и летающие мобильные робототехнические системы.
Компоненты роботов
Двигатели постоянного тока : В настоящий момент большинство роботов используют электродвигатели, которые могут быть нескольких видов.
Шаговые электродвигатели: Как можно предположить из названия, шаговые электродвигатели не вращаются свободно, подобно двигателям постоянного тока. Они поворачиваются пошагово на определённый угол под управлением контроллера. Это позволяет обойтись без датчика положения, так как угол, на который был сделан поворот, заведомо известен контроллеру; поэтому такие двигатели часто используются в приводах многих роботов и станках с ЧПУ.
Пьезодвигатели: Современной альтернативой двигателям постоянного тока являются пьезодвигатели, также известные как ультразвуковые двигатели. Принцип их работы весьма оригинален: крошечные пьезоэлектри

ческие ножки, вибрирующие с частотой более 1000 раз в секунду, заставляют мотор двигаться по окружности или прямой. Преимуществами подобных двигателей являются высокое нанометрическое разрешение, скорость и мощность, несоизмеримая с их размерами. Пьезодвигатели уже доступны на коммерческой основе и также применяются на некоторых роботах.
Воздушные мышцы: Воздушные мышцы — простое, но мощное устройство для обеспечения силы тяги. При накачивании сжатым воздухом мышцы способны сокращаться до 40 % от своей длины. Причиной такого поведения является плетение, видимое с внешней стороны, которое заставляет мышцы быть или длинными и тонкими, или короткими и толстыми[источник не указан 987 дней]. Так как способ их работы схож с биологическими мышцами, их можно использовать для производства роботов с мышцами и скелетом, аналогичными мышцам и скелету животных.
Электроактивные полимеры : Электроактивные полимеры — это вид пластмасс, который изменяет форму в ответ на электрическую стимуляцию. Они могут быть сконструированы таким образом, что могут гнуться, растягиваться или сокращаться. Впрочем, в настоящее время нет ЭАП, пригодных для производства коммерческих роботов, так как все ныне существующие их образцы неэффективны или непрочны.
Способы перемещения
Колёсные и гусеничные роботы
Шагающие роботы

Другие методы перемещения:
- Летающие роботы (в том числе БПЛА – беспилотные летательные аппараты).
- Ползающие роботы.
- Роботы, перемещающиеся по вертикальным поверхностям.
- Плавающие роботы.
Системы управления
Под управлением роботом понимается решение комплекса задач, связанных с адаптацией робота к кругу решаемых им задач, программированием движений, синтезом системы управления и её программного обеспечения.
По типу управления робототехнические системы подразделяются на:
1. Биотехнические:
1.1. командные (кнопочное и рычажное управление отдельными звеньями робота);
1.2. копирующие (повтор движения человека, возможна реализация обратной связи, передающей прилагаемое усилие, экзоскелеты);
1.3. полуавтоматические (управление одним командным органом, например, рукояткой всей кинематической схемой робота);
2. Автоматические:
2.1. программные (функционируют по заранее заданной программе, в основном предназначены для решения однообразных задач в неизменных условиях окружения);
2.2. адаптивные (решают типовые задачи, но адаптируются под условия функционирования);
2.3. интеллектуальные (наиболее развитые автоматические системы);
3. Интерактивные:
3.1. автоматизированные (возможно чередование автоматических и биотехнических режимов);
3.2. супервизорные (автоматические системы, в которых человек выполняет только целеуказательные функции);
3.3. диалоговые (робот участвует в диалоге с человеком по выбору стратегии поведения, при этом как правило робот оснащается экспертной системой, способной прогнозировать результаты манипуляций и дающей советы по выбору цели).
Среди основных задач управления роботами выделяют такие:
- планирование положений;
- планирование движений;
- планирование сил и моментов;
- анализ динамической точности;
- идентификация кинематических и динамических характеристик робота.
В развитии методов управления роботами огромное значение имеют достижения технической кибернетики и теории автоматического управления.
Подвиды современных роботов:
К настоящему времени роботы внедрены во многие сферы деятельности человека и продолжают дополнять и иногда заменять людской труд как в опасных видах деятельности, так и в повседневной жизни.
Читайте также: