
Реферат на тему планетарные передачи
Обновлено: 04.07.2024
Пример готовой курсовой работы по предмету: Детали машин
Содержание
Выдержка из текста
Сложными зубчатыми механизмами называются механизмы с зубчатыми передачами с числом зубчатых колес больше двух. Это могут быть механизмы с оригинальными структурными схемами или механизмы, образованные последовательным и (или) параллельным соединением простейших типовых зубчатых механизмов.
Механизмы, в которых кинематические цепи образуют или несколько крупных зарубежных фирм, их печатную рекламу на протяжении века).">один или несколько замкнутых контуров и в которых входной поток механической мощности в процессе передачи и преобразования делится на несколько потоков, а затем суммируется на выходном звене, называются многопоточными механизмами. Распределение передаваемых усилий по нескольким кинематическим парам уменьшает нагрузку на элементы пар и позволяет существенно уменьшать габаритные размеры и массу механизмов. Многозонный контакт звеньев механизма существенно увеличивает жесткость механизма, а за счет осреднения ошибок и зазоров, уменьшает мертвый ход и кинематическую погрешность механизма. Однако, за счет образования в структуре механизма внутренних контуров, число избыточных или пассивных связей в механизме увеличивается. Поэтому при изготовлении и сборке механизма необходимо либо повышать точность деталей, либо увеличивать зазоры в кинематических парах.
Сложные зубчатые механизмы, в которых ось хотя бы одного колеса подвижна, называются планетарными механизмами. К типовым планетарным механизмам относятся:
- •однорядный планетарный механизм;
- •двухрядный планетарный механизм с одним внешним и одним внутренним зацеплением
•двухрядный планетарный механизм с двумя внешними зацеплениями;
- •двухрядный планетарный механизм с двумя внутренними зацеплениями.
Элементы планетарного механизма имеют специальные названия:
Звено водила принято обозначать не цифрой, а латинской буквой h.
В таблице 1 приведены структурные схемы типовых планетарных механизмов, а также диапазоны рекомендуемых передаточных отношений и ориентировочные значения КПД при этих передаточных отношениях.
Список использованной литературы
Планетарные передачи - это такие, которые имеют зубчатые колеса с перемещающимися осями, общие сведения, достоинства и недостатки, разновидности и назначение. Конструктивные особенности планетарных передач. Расчеты: числа зубьев передач, на прочность.
| Рубрика | Производство и технологии |
| Вид | контрольная работа |
| Язык | русский |
| Дата добавления | 19.02.2010 |
| Размер файла | 1,1 M |
Студенты, аспиранты, молодые ученые, использующие базу знаний в своей учебе и работе, будут вам очень благодарны.
ПЛАНЕТАРНЫЕ ЗУБЧАТЫЕ ПЕРЕДАЧИ
1. Общие сведения
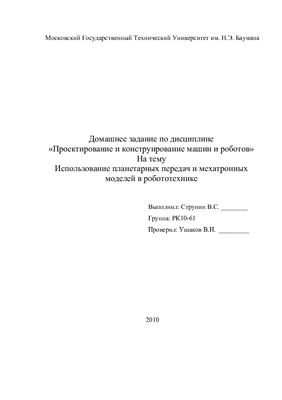
Планетарными называют передачи, имеющие зубчатые колеса с перемещающимися осями. Наиболее распространенная простейшая однорядная планетарная передача (рис. 1) состоит из центрального колеса 1 с наружными зубьями, неподвижного центрального (корончатого) колеса 3 с внутренними зубьями и водила Н, на котором закреплены оси планетарных колес, или сателлитов, 2.
Сателлиты обкатываются по нейтральным колесам и вращаются вокруг своих осей, т. е. совершают движение, подобное движению планет. Водило вместе с сателлитами вращается вокруг центральной оси.
При неподвижном колесе 3 движение передается от колеса 1 к водилу Н или наоборот.
Если в планетарной передаче сделать подвижными все звенья, т. е., оба колеса и водило, то такую передачу называют дифференциалом. С помощью дифференциала одно движение можно разложить на два или два сложить в одно. Например, движение от колеся 3 можно передавать одновременно колесу 1 и водилу Н или от колес 1 и 3 водилу Н и т. д.
В планетарных передачах применяются не только цилиндрические, но и конические колеса. Зубья могут быть прямые и косые.
Достоинства
1.Малые габариты и масса (передача вписывается в размеры корончатого колеса). Это объясняется тем, что мощность передается по нескольким потокам, численно равным числу сателлитов, поэтому нагрузка на зубья в каждом зацеплении уменьшается в несколько раз. 2. Удобны при компоновке машин благодаря соосности ведущих и ведомых валов.
3. Работа-юг с меньшим шумом, чем в обычных зубчатых передачах, что связано с меньшими размерами колес и замыканием сил в механизме. При симметричном расположении сателлитов силы в передаче взаимно уравновешиваются.
4. Малые нагрузки на опоры, что упрощает конструкцию опор и снижает потери в них.
5. Планетарный принцип передачи движения позволяет получить большие передаточные числа при небольшом числе зубчатых колес h малых габаритах.
1. Повышенные требования к тонкости изготовления и монтажа передачи.
2. Снижение к.п.д. передачи с ростом передаточного числа.
Планетарную передачу применяют как:
а) редуктор в силовых передачах и приборах;
б) коробку перемены передач, передаточное число в которой изменяется путем поочередного торможения различных звеньев (например, водила или одного из колес);
в) дифференциал в автомобилях, тракторах, станках, приборах.
Особенно эффективно применение планетарных передач, совмещенных с электродвигателем.
2. Передаточное число планетарных передач
При определении передаточного числа планетарной передачи используют метод остановки водила (метод Виллиса). По этому методу всей планетарной передаче мысленно сообщается дополнительное вращение с угловой скоростью водила, но в обратном направлении. При этом водило как бы останавливается, а закрепленное колесо освобождается. Получается так называемый обращенный механизм, представляющий собой обычную непланетарную передачу, в которой геометрические оси всех колес неподвижны. Сателлиты при этом становятся промежуточными (паразитными) колесами.
В качестве примера определения передаточного числа рассмотрим планетарную передачу, изображенную на рис. 2. при передаче движения от колеса 1 к водилу Н. Для обращенного механизма этой передачи
где w1 -- wн и w3 -- wн - соответственно угловые скорости колес 1 и 3 относительно водила Н;
z1 и z3 - соответственно числа зубьев колес 1 и 3.
Здесь существенное значение имеет знак передаточного числа. Принято передаточное число считать положительным, если в обращенном механизме ведущее и ведомое звенья вращаются в одну сторону, и отрицательным, если в разные стороны. В рассматриваемом обращенном механизме колеса 1 и 3 вращаются в разные стороны.
Для реальной планетарной передачи, у которой в большинстве случаев колесо 3 закреплено неподвижно, колесо I является ведущим, а водило Н -- ведомым, из формулы (1) при w3 =0 получим
Для других видов планетарных передач передаточное число определяется таким же методом.
3. Разновидности планетарных передач
Существует большое количество различных типов планетарных передач. Выбор типа передачи определяется ее назначением. Наиболее широко в машиностроении применяется однорядная планетарная передача, схема которой показана на рис. 1. Это передача имеет минимальные габариты. Применяется в силовых и вспомогательных приводах. К.п.д. передачи л =0,96. 0,98 при и = 3,15. 12,5.
Для получения больших передаточных чисел в силовых приводах применяют многоступенчатые планетарные передачи.
На рис. 2. а изображена схема, планетарной передали с двухрядным сателлитом, для которой при передаче движения от колеса 1 к водилу Н при w4 = 0 передаточное число
В этой передаче рациональные значения и?16 при л= 0,96. 0,97.
На рис. 2, б планетарная передача составлена из двух последовательно соединенных однорядных планетарных передач. В этом случае
и=и1 и2?125; л=л1 л2=0,92…..0,97.
4. Подбор чисел зубьев планетарных передач
На практике наибольшее распространение получила планетарная однорядная прямозубая передача (см. рис. 1), расчет которой и рассматривается ниже.
Числом зубьев центральной шестерни 1 задаются из условия неподрезания ножки зуба, принимая для нее z1>17.
Число зубьев неподвижного центрального колеса 3 определяют по заданному передаточному числу из формулы (2):
Число зубьев сателлитов 2 вычисляют из условия соосности, по которому межосевые расстояния аw зубчатых пар с внешним и внутренним зацеплениями должны быть равны. Из рис. 1 для кекорригированной прямозубой передачи
где d=mz -- делительные диаметры.
Так как модули зацеплений планетарной передачи одинаковые, то формула (5) примет вид
Полученные числа зубьев z1, z2 и z3 проверяют по условиям сборки и соседства.
Условие сборки требует, чтобы во всех зацеплениях центральных колес с сателлитами имело место совпадение зубьев со впадинами, в противном случае собрать передачу невозможно. Установлено, что при симметричном расположений сателлитов условие сборки удовлетворяется, когда сумма зубьев центральных колес (z1+ z3) кратна числу сателлитов с=2. 6 (обычно с = 3), т. е.
(z1+ z3)/с = целому числу. (7)
Условие соседства требует, чтобы сателлиты при вращении не задевали зубьями друг друга. Для этого необходимо, чтобы сумма радиусов вершин зубьев соседних сателлитов, равная da2=m (Z2+2), была меньше расстояния l между их осями (см. рис. 1), т. е.
da2 49,5(и' +1) КсТ1/сфа и'(0) 'нКнв (12)
где u'=z2/z1 -- передаточное число рассчитываемой пары колес;
Кс=1,1. 1,2 -- коэффициент неравномерности распределения нагрузки между сателлитами;
Т1 -- вращающий момент на валу центральной шестерни, Н*мм;
фа -- коэффициент ширины венца колеса. При и' 6,3 фa=0,4.
Полученное значение aw округляют до стандартного значения.
Ширина центрального (корончатого) колеса
Ширину венцов сателлитов и центральной шестерни принимают на 2. 4 мм больше значения &3.
Делительный диаметр центральной шестерни
Полученный расчетом модуль округляют до ближайшего стандартного значений, а затем уточняют числа колес по формулам:
с последующей проверкой условий сборки и соседства.
Окружную силу в зацеплении вычисляют по формуле
Радиальную силу определяют, как в обычных передачах.
6. Конструктивные особенности планетарных передач
На рис. 3 приведена распространенная конструкция планетарного редуктора, выполненного по схеме рис. 1. Благодаря соосности валов редуктор удобен для компоновки машин.
Вследствие неизбежной неточности изготовления нагрузка между сателлитами распределяется неравномерно.
Для выравнивания нагрузки по потокам в передачах с тремя сателлитами одно из центральных колес делают самоустанавливающимся в радиальном направлении (не имеющим радиальных опор).
В конструкции на рис. 3 плавающим является центральная шестерня 2, которая самоустанавливается по сателлитам S в радиальном направлении (см. рис. 1), а в осевом направлении фиксируется штырем 1 и зубчатой муфтой 6 с установленными в ней пружинными кольцами 5.
Для самоустановки сателлитов по неподвижному центральному колесу 4 применяют сферические подшипники качения 7.
Водила планетарных передач должны быть прочными и жесткими при малой массе. Выполняют их литыми или сварными.
На рис. 3 водило 3 выполнено литым из высокопрочного чугуна марки ВЧ50-2 за одно целое с тихоходным валом.
Список литературы
1. Куклин Н.Г. Детали машин: Учебник для машиностроит. спец. техникумов. - 4-е издание.- М.: Высш. школа 1987.- 383 .
2. Иванов М.Н. Детали машин: Учебное для студентов высш. технических учебных заведениях. М.: Высш. школа 1991/383 с.
Подобные документы
Преимущества и недостатки планетарных передач над обычными, область применения. Принцип работы и основные звенья планетарных передач. Волновые зубчатые передачи, конструктивная схема, принцип работы, преимущества и недостатки волновых передач.
реферат [837,0 K], добавлен 30.11.2010
Зубчатые механизмы, в которых движение между звеньями передается последовательным зацеплением зубьев. Классификация зубчатых передач. Элементы теории зацепления передачи. Геометрический расчет эвольвентных прямозубых передач. Конструкции зубчатых колес.
презентация [462,9 K], добавлен 24.02.2014
Условия работоспособности и характерные виды разрушения зубьев. Цилиндрические и конические зубчатые передачи: силы в зацеплении, сопротивление контактной усталости. Характеристика, материалы, тепловой расчет и расчет на прочность червячных передач.
курсовая работа [1,3 M], добавлен 23.11.2009
Классификация зубчатых колес по форме профиля зубьев, их типу, взаимному расположению осей валов. Основные элементі зубчатого колеса. Расчет основных геометрических параметров цилиндрической зубчатой передачи. Измерение диаметра вершин зубьев колеса.
презентация [4,4 M], добавлен 20.05.2015
Параметры цилиндрических косозубых колес. Конструкции и материалы зубчатых колес, их размеры и форма. Конические зубчатые передачи и ее геометрический расчет. Конструкция и расчет червячных передач. Основные достоинства и недостатки червячных передач.
реферат [2,0 M], добавлен 18.01.2009
Конструктивные особенности и параметры цилиндрических и конических зубчатых передач. Насадной зубчатый венец. Скольжение зубьев в процессе работы передачи. Силы в прямозубой цилиндрической передаче. Критерии работоспособности закрытых зубчатых передач.
презентация [178,1 K], добавлен 25.08.2013
Геометрические параметры конических зубчатых передач. Силы в конических зубчатых передачах. Передаточное число как отношение числа зубьев ведомой шестерни к ведущей. Приведение прямозубого конического колеса к эквивалентному прямозубому цилиндрическому.
Основным достоинством планетарных передач являются малые габариты и массы. Это объясняется следующими причинами: распределением нагрузки между сателлитами, благодаря чему нагрузки на зубья меньше в несколько раз; большим передаточным отношением в одной ступени, что часто позволяет не прибегать к сложным многоступенчатым передачам; широким применением передач с внутренним зацеплением, обладающих… Читать ещё >
- основы функционирования систем сервиса. в 2 ч. часть 1
Планетарные зубчатые передачи ( реферат , курсовая , диплом , контрольная )
Планетарными называют передачи, содержащие зубчатые колеса с перемещающимися геометрическими осями, называемые сателлитами. Существует множество различных схем планетарных механизмов. На рис. 5.17 изображена схема четырехзвенной простейшей передачи, состоящей из центрального вращающегося колеса 1 с неподвижной геометрической осью; сателлитов 2, оси которых перемещаются в пространстве; неподвижного колеса 3 с внутренними зубьями; вращающегося водила Н, на котором установлены сателлиты. Эта схема имеет высокий КПД (0,96—0,99), технологична, компактна и поэтому наиболее распространена. Сателлиты вращаются вокруг своих осей и вместе с ними вращаются вокруг центрального колеса, т. е. совершают сложное (плоскопараллельное) движение, подобное движение планет Солнечной системы. Отсюда название — планетарные передачи.
Центральные колеса или сателлиты могут находиться как во внешнем, так и во внутреннем зацеплении. Зубья могут быть прямые или косые. Число сателлитов п(0 в планетарных передачах обычно равно 3.

Рис. 5.17. Схема планетарной передачи.
Основным достоинством планетарных передач являются малые габариты и массы. Это объясняется следующими причинами: распределением нагрузки между сателлитами, благодаря чему нагрузки на зубья меньше в несколько раз; большим передаточным отношением в одной ступени, что часто позволяет не прибегать к сложным многоступенчатым передачам; широким применением передач с внутренним зацеплением, обладающих повышенной несущей способностью.
Планетарные передачи работают с меньшим шумом, чем простые, что связано с повышенной плавностью внутреннего зацепления, меньшими размерами колес, замыканием сил в механизме и передачей меньших сил на корпус.
К недостаткам относится то, что планетарные передачи требуют повышенной точности изготовления, имеют, как правило, большее число деталей и сложнее в сборке, чем передачи с неподвижными осями.
Планетарные передачи имеют широкие области применения, основными из которых являются:
- • редуцирование скорости при необходимости особо малых габаритов и массы передач — многосателлитные передачи или необходимости очень больших передаточных отношений — механизмы приборов;
- • сложение или разложение движений — дифференциалы, применяемые в станках, приборах, автомобилях и других машинах;
- • легкое управление и регулирование скорости — многоступенчатые планетаные коробки скоростей, управляемые поочередным торможением звеньев; замкнутые планетарные передачи со встроенной бесступенчатой передачей и др.
Передаточное отношение.
Для обращенного механизма передаточное отношение от колеса 1 к колесу 3

где (сох — сон) и (со3 -сон) — соответственно частоты вращения колес 1 и 3 относительно неподвижного водила Н; и z3 — числа зубьев этих колес; нижние индексы при оказывают ведущие и ведомые звенья, верхний — мысленно остановленное звено.
Передаточное отношение считается положительным, если ведущее и ведомое звенья вращаются в одном направлении, и отрицательным, если эти звенья вращаются в разных направлениях. В рассматриваемом обращенном механизме колеса 1 и 3 вращаются в противоположных направлениях, поэтому i13 и т. п.
МГТУ им. Н. Э. Баумана, 16 стр.
Факультет "Робототехника и Комплексная автоматизация (РК)"
Специальность "Робототехнические системы (РК-10)"
Дисциплина "Проектирование и Конструирование Мобильных Роботов (ПКМР)", 4 курс
Мехатронный модуль
Преимущества мехатронных модулей
Обобщенная структура мехатронной системы
Методика расчета универсального мехатронного модуля
Планетарные передачи
Распространённые передачи
КПД планетарных передач
Кинематика планетарных передач
Вращающие моменты на основных звеньях (Ta, Tb, Th)
Силы в зацеплении
Особенности расчета планетарных передач
Достоинства и недостатки
Применение в робототехнике
Андре П., Кофман Ж.-М., Лот Ф., Тайар Ж.-П. Конструирование роботов
- формат djvu
- размер 3.08 МБ
- добавлен 24 декабря 2008 г.
М.: Мир, 1986г. — 360 с. Монография французских специалистов по робототехнике посвящена вопросам проектирования отдельных узлов роботов и их функционирования. Рассмотрены принципы действия и конструкции различных схватов манипуляторов, механических передач, электро-, пневмо- и гидродвигателей, используемых в робототехнике. Материал иллюстрирован большим числом схем и чертежей. Для инженеров, проектирующих роботы, а также аспирантов и студентов.
Брицкий В.Д., Тимофеев Б.П. Кинематический и динамический анализ манипуляционной системы робота
- формат pdf
- размер 315.54 КБ
- добавлен 03 октября 2011 г.
Учебное пособие, СПбГУ ИТМО, 2004 г., 19 стр. Методические указания содержат сведения по решения задач, возникающих при кинематическом и динамическом анализе и синтезе мехатронных систем на примере манипуляционной системы робота, используя матричные методы исследования. Расчет дифференциальных уравнений движения звеньев робота представлен в форме Аппеля. Матричные преобразования формализовали процесс определения скоростей и ускорений звеньев и то.
Жмылевская М.Д. Грилин Б.В. Мобильные и подвижные роботы, используемые в немашиностроительных областях
- формат djvu
- размер 3.13 МБ
- добавлен 05 ноября 2010 г.
ВНИИТЭМР (Всероссийский научно-исследовательский институт информации и технико-экономических исследований по машиностроению и робототехнике), Москва, 1991 год - 280 стр. Предлагаемые информационные материалы включают несколько разделов. В первом разделе дан анализ и предложения по классификации мобильных и подвижных роботов, а такие состояние и прогнозы развития роботов, используемых в немашиностроительных отраслях. В последующих. разделах, пред.
Никифоров И.К., Никифорова С.О., Рабданова Н.М. Расчет параметров роботокомплексов
- формат djvu
- размер 1.43 МБ
- добавлен 04 мая 2009 г.
ВСГТУ. — Улан-Удэ, 1998г. — 100 с. В учебном пособии излагаются основы формирования роботокомплексов (РТК) повышенного быстродействия. Даны примеры расчета и проекгирования РТК. Книга предназначена для студентов вузов, аспирантов, а также может быть полезна преподавателям, специалистам по робототехнике и автоматизации производства.
Ноф Ш. (ред.) Справочник по промышленной робототехнике. Книга 1
- формат djvu
- размер 10.11 МБ
- добавлен 15 января 2012 г.
М.: Машиностроение, 1989,— 480 с.: ил. В 2-х кн. Справочник, подготовленный профессором Ш. Нофом (США), содержит богатый фактический материал о развитии робототехники в США, ФРГ, Великобритании, Японии, Швеции и Франции. Читателям предлагаются полезные и многочисленные сведения по конструкциям, системам управления и информационному обеспечению роботов, рекомендации по применению роботов в ГПС. В книгу 1 включены темы: перспективы развития, механ.
Реферат - Мехатроника и мехатронные системы
- формат docx
- размер 78.79 КБ
- добавлен 02 апреля 2010 г.
Реферат - Промышленная робототехника
- формат docx
- размер 43.53 КБ
- добавлен 09 декабря 2010 г.
Введение Основные сведения о робототехнике Основные задачи Манипуляции изделиями и заготовками Загрузочно-разгрузочные работы Перенос изделий с одной производственной установки на другую Упаковка Погрузка тяжелых предметов на конвейер или паллеты Обработка деталей и заготовок Сварка Обработка резаньем Сверление Бесконтактная обработка заготовок Нанесение различных составов на поверхность Чистовая обработка Испытания и контроль Сборка Монтаж печат.
Юревич Е.И. Управление роботами и робототехническими системами
- формат pdf
- размер 8.28 МБ
- добавлен 06 июня 2009 г.
Санкт-Петербург 2000 [PDF] Книга является учебным пособием по робототехнике и служит для изучения систем автоматического, автоматизированного и ручного управления роботами и другими средствами робототехники, а также техническими системами и комплексами, содержащими эти средства. Изложение этих вопросов базируется на теории автоматического управления и прикладной механике.
Cutkosky M.R. Robotic Grasping and Fine Manipulation
- формат pdf
- размер 6.19 МБ
- добавлен 06 мая 2009 г.
Springer (The Springer International Series in Engineering and Computer Science), 1985, 192 pages. The book discusses a wide range of robot tasks in a manufacturing cell, from assembling and loading to grinding and routing parts. Одна из первый книг в робототехнике, посвяшенных задачам моделирования и захвата посредством многопальцевых рук робота.
Murray R.M., Li Z., Sastry S. A Mathematical Introduction to Robotic Manipulation
- формат pdf
- размер 2.67 МБ
- добавлен 30 июня 2009 г.
Один из самых популярных и интересных учебников по робототехнике. CRC Press, 1st edition, 1994, 480 pages. The book presents a mathematical formulation of the kinematics, dynamics, and control of robot manipulators. It uses an elegant set of mathematical tools that emphasizes the geometry of robot motion and allows a large class of robotic manipulation problems to be analyzed within a unified framework. The foundation of the book is a derivation.
Планетарнойназывается передача, имеющая в своём составе зубчатыеколёса с перемещающимися геометрическими осями (рис. 15). Такие колёса (рис. 15, поз. 2) принято называть сателлитами.
Колёса, геометрические оси которых совпадают с общей осью передачи (с осью входного и выходного валов), называют центральными. Центральное колесо с зубьями на внешней стороне обода (рис. 15, поз. 1), то есть направленными от оси вращения колеса, называют солнечной шестерней, а второе центральное колесо, взаимодействующее с сателлитами внутренними зубьями (рис. 15, поз. 3), то есть направленными к оси колеса, называют эпициклическим или просто эпициклом. Звено, несущее на себе подвижные оси сателлитов, называют водилом (рис. 15, поз. 4). На кинематических схемах (рис. 15) зубчатые колёса обычно обозначают арабскими цифрами, а водило – буквой H или h.
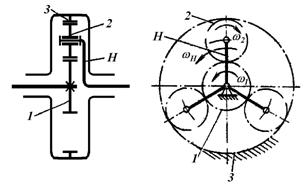 Рис. 15. Планетарная передача (кинематическая схема): 1 – солнечное колесо; 2– сателлит; 3 – эпицикл; H – водило. |
Планетарный ряд, у которого ни одно из звеньев не соединено со стойкой, обладает двумя степенями свободы, то есть требует для однозначного характера движения всех своих звеньев подвода движения извне к двум из этих звеньев. Такой механизм принято называть дифференциальным. Если же в планетарном дифференциальном механизме одно из звеньев соединить со стойкой (сообщить ему постоянную скорость вращательного движения равную 0 радиан в секунду), то такой механизм превращается в передачу. Связывание со стойкой (или между собой) разных звеньев дифференциального планетарного ряда ведёт к изменению передаточного числа планетарной передачи.
Применение планетарных механизмов в коробках передач обеспечивает следующие преимущества:
1. уменьшение габаритов трансмиссии;
2. высокую надежность работы (сохранение работоспособности даже при потере нескольких зубьев на центральных колёсах);
3. высокий КПД при относительно больших передаточных числах;
4. отсутствие поперечной нагрузки на основных валах;
5. возможность изменения передаточного числа без вывода зубчатых колёс из зацепления;
6. возможность отсоединения вала двигателя от трансмиссии при использовании фрикционов коробки передач (коробка передач одновременно выполняет роль главного фрикциона);
7. высокую скорость переключения передач, что способствует повышению среднего темпа движения машины.
Недостатки планетарных передач:
2. резкое снижение КПД при больших передаточных числах.
Как правило, планетарные передачи, имеющие в своём составе эпициклические колёса, отличаются более высоким КПД по сравнению с передачами, состоящими только из колёс внешнего зацепления. Именно поэтому в планетарных коробках передач используются простейшие планетарные ряды с эпициклом. Число переключений в одном ряду обычно не превосходит трёх с целью упрощения системы управления фрикционами и тормозами. Количество планетарных рядов в одной коробке передач тоже обычно не бывает более трёх.
Особенности проектирования и расчёта планетарных передач связаны с наличием избыточных кинематических связей (нескольких сателлитов). Предельно возможное число сателлитов в одном планетарном ряду ограничивается условием соседства, которое гласит: число сателлитов в планетарном ряду должно быть таким, чтобы соседние сателлиты не касались друг друга.
Но в практике машиностроения число сателлитов редко принимают более шести в связи с трудностью обеспечения равномерного распределения нагрузки между ними при большом их количестве.
Второенеобходимоеусловие существования планетарного ряда называется условием соосности.Суть его вытекает из необходимости соблюдения соосности центральных колёс, солнечного и эпицикла, и водила. Для простого планетарного ряда это условие выливается в равенство межосевых расстояний зацепления солнечного колеса с сателлитом a1-2 и зацепления сателлита с эпициклом a2-3.
Разветвление потока мощность при передаче силовых нагрузок через сателлиты обусловливает необходимость принятия специальных мер для обеспечения равномерности распределения нагрузок между сателлитами. Причин неравномерной загрузки сателлитов может быть несколько: неточность изготовления зубчатых колёс, неодинаковость межосевого расстояния у разных сателлитов, перекос геометрических осей сателлитов (непараллельность осей сателлитов и главной оси передачи) и др. При необеспечении равномерного распределения нагрузки между сателлитами расхождение между её величиной у отдельных сателлитов может достигать до 70 %.
Выравнивание нагрузки между сателлитами может быть достигнуто путём:
1. повышения точности изготовления всех деталей передачи;
2. выполнения одного из центральных колёс или водила плавающим, то есть имеющим некоторую радиальную подвижность относительно корпуса и сопряжённых деталей (эпицикл в бортовом редукторе БРДМ), и
3. использование упругих элементов конструкции (обод эпицикла повышенной гибкости, оси сателлитов малой жёсткости и т.п.).
Прочностной расчёт планетарных передач выполняют по формулам для цилиндрических передач. При определении расчётного момента, действующего в зубчатом зацеплении, учитывается число сателлитов, передающих рабочие нагрузки, и неравномерность нагружения их зубьев.
Для изготовления элементов планетарных передач используют материалы, предназначенные для рядовых зубчатых передач, это, главным образом, углеродистые машиностроительные и углеродистые легированные стали, подвергаемые улучшающей термической обработке.
Как уже упоминалось выше, планетарные механизмы в исходном состоянии имеют две степени свободы, и это их свойство предопределило использование этих механизмов в качестве дифференцирующих (суммирующих).
Читайте также: