
Реферат на тему ориентация роботов
Обновлено: 04.07.2024
Робот (от чешск. robota ) — автоматическое устройство с антропоморфным действием, которое частично или полностью заменяет человека при выполнении работ в опасных для жизни условиях или при относительной недоступности объекта.
Робот может управляться оператором либо работать по заранее составленной программе. Использование роботов позволяет облегчить или вовсе заменить человеческий труд на производстве, в строительстве, при работе с тяжёлыми грузами, вредными материалами, а также в других тяжёлых или небезопасных для человека условиях.
Промышленный робот — автономное устройство, состоящее из механического манипулятора и перепрограммируемой системы управления, которое применяется для перемещения объектов в пространстве в различных производственных процессах.
Промышленные роботы являются важными компонентами автоматизированных гибких производственных систем (ГПС), которые позволяют увеличить производительность труда.
Бытовые роботы
Одним из первых примеров удачной массовой промышленной реализации бытовых роботов стала механическая собачка AIBO корпорации Sony.
Всё большую популярность набирают роботы-уборщики, по своей сути - автоматические пылесосы, способные самостоятельно прибраться в квартире и вернуться на место для подзарядки без участия человека.
Изобретатель Пит Редмонд (Pete Redmond) создал робота RuBot II, который может собрать кубик Рубика за 35 секунд.
Существует также направление моделизма, которое подразумевает создание роботов. Сейчас моделисты делают как радиоуправляемых роботов, так и автономных. Проводятся соревнование по нескольким основным направлениям. Среди соревнований автономных роботов стоит упомянуть бег на скорость по белой линии, борьбу сумо, робо-футбол.
Производители роботов
Известные коммерческие модели роботов
История
Функциональная схема промышленного робота
В составе робота есть механическая часть и система управления этой механической частью, которая в свою очередь получает сигналы от сенсорной части. Механическая часть робота делится на манипуляционную систему и систему передвижения.
Манипуляторы
Манипулятор — это механизм для управления пространственным положением орудий и объектов труда.
Манипуляторы включают в себя подвижные звенья двух типов:
· звенья, обеспечивающие поступательные движения
· звенья, обеспечивающие угловые перемещения
Сочетание и взаимное расположение звеньев определяет степень подвижности, а также область действия манипуляционной системы робота.
Для обеспечения движения в звеньях могут использоваться электрические, гидравлический или пневматический привод.
Вместо захватных устройств манипулятор может быть оснащен рабочим инструментом. Это может быть пульверизатор, сварочная головка, отвёртка и т. д.
Система передвижения. Внутри помещений, на промышленных объектах используются передвижения вдоль монорельсов, по напольной колее и т. д.
Управление
Управление бывает нескольких типов:
1. Программное управление — самый простой тип системы управления, используется для управления манипуляторами на промышленных объектах. В таких роботах отсутствует сенсорная часть, все действия жёстко фиксированы и регулярно повторяются. Для программирования таких роботов могут применяться среды программирования типа VxWorks/Eclipse или языки программирования например Forth, Оберон, Компонентный Паскаль, Си. В качестве аппаратного обеспечения обычно используются промышленные компьютеры в мобильном исполнении PC/104 реже MicroPC. Может происходить с помощью ПК или программируемого логического контроллера.
2. Адаптивное управление — роботы с адаптивной системой управления оснащены сенсорной частью. Сигналы, передаваемые датчиками, анализируются и в зависимости от результатов принимается решение о дальнейших действиях, переходе к следующей стадии действий и т. д.
3. Основанное на методах искусственного интеллекта.
4. Управление человеком (например, дистанционное управление).
Принципы управления
Современные роботы функционируют на основе принципов обратной связи, подчинённого управления и иерархичности системы управления роботом.
Иерархия системы управления роботом подразумевает деление системы управления на горизонтальные слои, управляющие общим поведением робота, расчётом необходимой траектории движения манипулятора, поведением отдельных его приводов, и слои, непосредственно осуществляющие управление двигателями приводов.
Подчинённое управление
Подчинённое управление служит для построения системы управления приводом. Если необходимо построить систему управления приводом по положению (например, по углу поворота звена манипулятора), то система управления замыкается обратной связью по положению, а внутри системы управления по положению функционирует система управления по скорости со своей обратной связью по скорости, внутри которой существует контур управления по току со своей обратной связью.
Современный робот оснащён не только обратными связями по положению, скорости и ускорениям звеньев. При захвате деталей робот должен знать, удачно ли он захватил деталь. Если деталь хрупкая или её поверхность имеет высокую степень чистоты, строятся сложные системы с обратной связью по усилию, позволяющие роботу схватывать деталь, не повреждая её поверхность и не разрушая её.
Управление роботом может осуществляться как человеком-оператором, так и системой управления промышленным предприятием (ERP-системой), согласующими действия робота с готовностью заготовок и станков с числовым программным управлением к выполнению технологических операций.
Действия промышленного робота
Среди самых распространённых действий, совершаемых промышленными роботами можно назвать следующие:
· перемещение деталей и заготовок от станка к станку или от станка к системам сменных палет;
· сварка швов и точечная сварка;
· выполнение операций резанья с движением инструмента по сложной траектории.
Промышленный робот является устройством, производящим некие манипулятивные функции, схожие с функциями руки человека.
Достоинства использования
· достаточно быстрая окупаемость
· исключение влияния человеческого фактора на конвейерных производствах, а также при проведении монотонных работ, требующих высокой точности;
· повышение точности выполнения технологических операций и, как следствие, улучшение качества;
· возможность использования технологического оборудования в три смены, 365 дней в году;
· рациональность использования производственных помещений;
· исключение воздействия вредных факторов на персонал на производствах с повышенной опасностью;
Если этого робота ударить ногой, он рассыплется на три части. Далее эти части оживут и, ползая как гусеницы, начнут сближаться. Через весьма приличное время трём кускам бота наконец удаётся состыковаться, после чего тот встаёт на ноги, готовый к дальнейшей работе
На выставке Wired NextFest 2008, прошедшей в конце сентября – начале октября в Чикаго, был показан забавный робот ckBot, которого можно было бы принять за художественный проект с техническим уклоном. Но он –часть серьёзной работы, чьи плоды однажды могут пригодиться сразу в нескольких прикладных областях.
Любопытно, что все три части робота идентичны (каждая построена из пяти блоков, обладающих моторизованным сочленением, допускающим поворот деталей на 180 градусов). Это не мешает им в нужный момент определиться, какие из них станут ногами, а какая — туловищем.
Американские инженеры назвали это умение "Самосборка после взрыва" (Self-reassembly After Explosion), впрочем, уточняя, что "взрыв" – это просто некое сильное воздействие, не важно, какой природы.
Построил эту машину Марк Йим (Mark Yim), адъюнкт-профессор инженерии в университете Пенсильвании (University of Pennsylvania) и его коллеги из лаборатории модульных роботов (Modular Robotics Lab).
Как вы уже, наверное, догадались, каждый модуль ckBot обладает своими "мозгами", батарейкой, электромоторчиками и системами связи.
Добавим лишь, что между собой части робота стыкуются при помощи магнитов, а ищут они друг друга благодаря встроенным цифровым камерам и мигающим светодиодным маякам. Кроме того, у каждой части есть акселерометр для "чувства равновесия" как при самостоятельном движении, так и в составе полного робота.
Легко представить, что оснащённый различными датчиками самособирающийся робот пригодится как военным (для разведки, например), так и учёным (изучение планет), или ремонтникам (проникновение в труднодоступные части больших установок).
Что может при этом робота "раскидать" — не вполне понятно. Да и неважно. Главное — рассыпавшись, бот может вернуть себе первоначальный вид. Правда, в нынешнем варианте дроида рановато выпускать на настоящее поле боя, пусть сперва набьёт шишек (смотрите видео до конца).
Логично спросить: "К чему такие сложности?" Дело в том, что, по общему замыслу проекта, ckBot и ему подобные машины должны собираться из куда большего количества модулей. При этом фигура, которую они образуют, зависит только от выбранной программы, а таковых внутри модулей может быть запасено немало. Хотите — получите "змею", желаете — "кошку" или "собаку".
Помните змейку Рубика (Rubik's Snake)? Тот же принцип, только всё крутится само. Так что новый бот мог бы стать классной игрушкой. Но Марк видит для него другое поле деятельности.
Непрерывно трансформируемый робот ("самореконфигурируемый" по определению создателей) пригодится там, где нужно проявлять гибкость в зависимости от ситуации. Скажем, в узкую щель может проползти "змея", какую-то механическую работу лучше поручить андроиду, а на большое расстояние путь катится "колесо".
Да, цепочка блоков ckBot может замкнуться и, меняя форму получившегося обода, катиться со скоростью до 1,6 метра в секунду. Это самый быстрый способ передвижения для ckBot, установили американские исследователи.
СkBot напомнил нам о целом ряде его идеологических предшественников. Вспомним, к примеру, робота из университета Корнелла (Cornell University).
Этот аппарат мог не просто собираться из абсолютно идентичных кусочков, но и строить свои копии. Правда, бот тот стоял на месте, а очередные детальки для сборки его собрата ему надо было класть в строго определённое место.
Получается, что группа под руководством Йима сумела "освободить" такого самосборщика, придав ему и его блокам не только способность к перемещению, но и умение находить друг друга. Осталось только научиться делать такие блоки всё более "умными" и мощными, и вперёд — отпускайте фантазию на волю.
4. РОБОТЫ AQUAJ ELLY И A IRJ ELLY
Таким путем пошли и разработчики компании Festo, создатели интереснейших роботов – AquaJelly и AirJelly, обратившие свое внимание на древнейших представителей фауны, медуз. Разумеется, к этому приложены самые современные технологии, доступные человечеству.
AquaJelly, по сути, представляет собой искусственную медузу, которую приводит в движение электромотор и адаптивная механическая система. Она состоит из полупрозрачной полусферы и восьми щупалец, а центр ее занимает водонепроницаемая емкость, в которой укрыт и двигатель, и пара Li-Ion батарей, и сервоприводы.
5. РОБОТ TETWALKER
TETwalker – это пирамида из шести стержней, соединённых узлами.
В каждом узле находится электроника и электродвигатели, способные в широких пределах менять длину стержней.
Потому правильным тетраэдром данный робот является только находясь в покое. Зато когда робот хочет попутешествовать, он меняет свою форму, так, что центр тяжести выносится за предел опоры.
Тут же следует опрокидывание на бок. Но поскольку все стороны машины совершенно равнозначны – никакого "падения" нет – так робот и двигается.
Каждый узел в вершине пирамиды может нести камеры и сенсоры, так что перед нами работающий прототип робота для исследования других планет.
Его авторы считают, что подобный способ передвижения выгоден, так как этот робот принципиально не может опрокинуться на склоне.
Даже если он скатится в кратер, то спокойно продолжит работу. А если стенки не слишком крутые – сможет и подняться наверх. Надо ли говорить, что обычный марсоход (с колёсами), если перевернётся на камне, то тут же и заканчивает своё "выступление".
Однако, полагают создатели TETwalker, куда интереснее будет, когда нанотехнологии и микромеханика позволят уменьшить размеры такого тетраэдра в десятки, а может и в сотни раз.
Все технологические предпосылки к такому радикальному сокращению уже есть или намечаются в ближайшей перспективе.
И если каждый узел такого робота дополнить стыковочным механизмом – мириады подобных машин смогут формировать ту самую "живую амёбу", меняющую форму в зависимости от условий, а также заживляющую пробоины.
Она же сможет автоматически собираться в радиотелескоп или круглый планетоход типа "перекати-поле".
Миниатюрные и сравнительно простые процессоры таких модулей смогут объединяться в единый компьютер, возможно, похожий на нейронную сеть.
"Мы не жили бы долго, если бы наши тела работали, как современные космические корабли, — рассказал глава проекта доктор Стивен Кёртис (Steven Curtis). – Когда у нас возникает травма, новые клетки заменяют повреждённые. Подобным образом неповреждённые единицы роя объединятся, продолжая выполнение миссии, несмотря на обширное повреждение".
Да, авторы проекта предлагают называть такие корабли-роботы роями, хотя, учитывая, что его элементы будут соединены между собой, больше подошло бы определение многоклеточный организм.
Как бы то ни было, нынешний треугольный робот – наглядный пример, как может работать одна клетка такого робота-роя.
Он не только ходил (если можно применить к нему такое слово) по полу лаборатории в центре Годдарда, но уже успел побывать на испытаниях в Антарктиде.
В январе 2005 года машина оказалась на научной станции Макмердо (McMurdo), где условия во многом напоминают Марс.
Тест показал, что некоторые изменения улучшат работу робота. Например, размещение двигателей в середине распорок, а не в узлах, упростит конструкцию узлов и увеличит их надёжность.
Также в рамках данного проекта специалисты развивают новое программное обеспечение, позволяющее треугольникам собираться в "разумные" (до некоторой степени) машины.
Удивительный мир робототехники и его многообещающее будущее

Робототехника - это отрасль науки и техники, которая занимается проектированием, конструированием и эксплуатацией роботов, а также компьютерных систем для их управления, сенсорной обратной связи и обработки информации.
Хотя первые роботы были придуманы много лет назад, реальный потенциал полностью автономной робототехники был реализован во второй половине XX века.
Вы также можете прочитать: История робототехники
Применение робототехники
Основная цель робототехники заключалась в том, чтобы просто выполнять набор сложных задач, в основном на промышленных предприятиях, но теперь она распространилась на множество областей.
Сегодня мы можем выделить следующие сферы применения робототехники:
- Военные роботы: Само собой разумеется, что военные операции сопряжены с высоким уровнем риска и, следовательно, имеет смысл использовать машины для спасения человеческих жизней. Существует множество разновидностей военных роботов, а именно БПЛА (беспилотные летательные аппараты, также известные как дроны), UGV (беспилотные наземные транспортные средства) и UUV (беспилотные подводные аппараты). Они используются для обнаружения террористов и проведения атак. Есть даже четвероногие роботы для переноски тяжелого оружия и боеприпасов.

- Образование: многие школы и институты используют роботов для обучения и вовлечения студентов в программы STEM (наука, технология, инженерия и математика). Студентам доступно множество наборов, с помощью которых они могут многое узнать о робототехнике. Не только это, но и детям с аутизмом и другими поведенческими расстройствами также удобнее взаимодействовать с роботами и получать знания по различным предметам.
- Здравоохранение: Разрабатываются различные виды роботов, которые будут использоваться в больницах, чтобы помочь врачам и медсестрам в уходе за пациентами. Есть роботы, которые могут продезинфицировать место, позаботиться о потребностях пациентов и даже удалить нежелательные элементы из тела без хирургического вмешательства. Существует также робот по имени да Винчи, который помогает с точностью выполнять операции, которые сложно выполнить вручную.
- Сельское хозяйство: на сельскохозяйственных полях используются малогабаритные роботы, оснащенные камерой и датчиками. Они перемещаются по полям и обнаруживают сорняки и другие виды инфекций. Датчики помогают наносить химические средства только на пораженные участки, тем самым защищая окружающую среду от выброса вредных химикатов в воздух.

- Производство: Очевидно, промышленные роботы широко используются на промышленных предприятиях. Такие факторы, как отрицательный прирост населения в некоторых странах, незаинтересованность молодых работников заниматься заводской работой и экономия времени при использовании роботизированного оборудования, определяют подъем интереса к промышленным роботам. Самая распространенная иллюстрация, которую можно здесь привести, - это автомобильные заводы, которые вместе с рабочими производят автомобили.

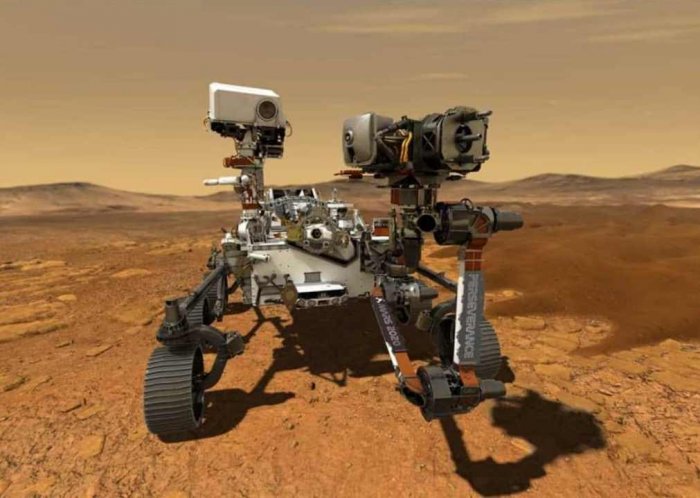
- Космос: несколько стран построили собственных космических роботов различных форм и размеров, чтобы исследовать космос. Некоторые из них не могут даже контролировать свой собственный вес на Земле, но эффективно работают в космосе с отличной ловкостью.
Применение промышленных роботов:
Виды роботов
От тяжелых, металлических и проводных машин, известных как супер роботы, до крошечных автономных устройств, известных как наноботы, область робототехники была исследована в значительной степени. Ниже перечислены наиболее интересные виды роботов, которые были разработаны в последнее время.
Давайте посмотрим список некоторых интересных форм роботов:
Экзоскелеты: это технология, в которой электронный костюм для тела предлагает пользователю движение конечностей и увеличивает силу.
В первую очередь они используются в военных целях для подъема тяжелых грузов и для пациентов с травмами позвоночника.
Пример: Ekso Bionics разработала эксо-костюмы для всего тела, которые могут носить люди, пострадавшие от инсульта или травмы спинного мозга, чтобы снова встать на ноги.
Первоначально разработанные для солдат, эти костюмы также используются в различных реабилитационных клиниках для пациентов со слабостью нижних конечностей.

Гуманоидные роботы: это роботы с телом, напоминающим человеческое, с головой, двумя руками, туловищем и двумя ногами.
Подкатегория гуманоидов известна как андроиды, которые внешне очень похожи на человека с точки зрения эстетики и могут имитировать человеческое поведение.
Пример: Атлас - один из самых продвинутых роботов-гуманоидов, разработанный компанией Boston Dynamics, принадлежащей Google.
Хотя это не андроид с человеческими кожей и выражениями лица, но он может делать много интересного. Он может ходить по снегу и восстанавливать равновесие, как и мы, открывать двери, поднимать ящики и даже ощущать предметы, лежащие перед ним.

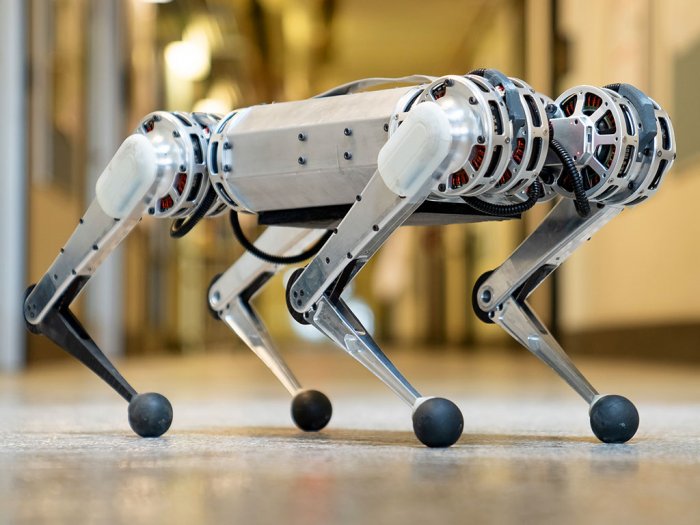
Роботы-животные: робототехника, вдохновленная биологией, - это довольно новая категория робототехники, в которой естественные биологические характеристики живых существ воспроизводятся в виде моделей роботов, вдохновленных животными.
Наблюдаются такие черты животных, как то, как они прыгают, карабкаются, ходят или ползут, а затем предпринимаются попытки воспроизвести их в настройке машины.
Пример: существует робот по имени Cheetah, разработанный Boston Dynamics, который может скакать со скоростью более 45 км в час.
В Массачусетском технологическом институте разработан аналогичный робот с таким же названием, который может обнаруживать препятствия и перепрыгивать через них при беге со скоростью 20 км в час.
Роботы-спасатели. Одним из наиболее логичных и разумных способов использования роботов является их развертывание в ситуациях, связанных с ликвидацией последствий стихийных бедствий при проведении спасательных операций. Требуется много мужества, а также усилия, чтобы найти и спасти жертв во время человеческой или техногенной катастрофы.
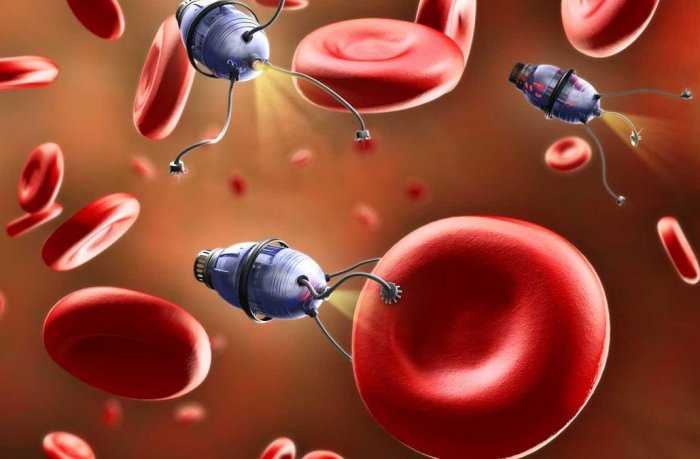
Наноботы: эти крошечные устройства предназначены для выполнения повторяющихся задач с точностью до наноразмеров в несколько нанометров или меньше. Они применяются при сборке и обслуживании сложных систем или для создания устройств, машин и схем на атомарном или молекулярном уровне. Кроме того, в сфере здравоохранения наноботов используют для доставки лекарств, уничтожения раковых клеток и т. д.
Пример: группа физиков из Университета Майнца в Германии сконструировала самый маленький в мире двигатель из одного атома. Он преобразует тепловую энергию в движение в самом маленьком масштабе, который мы когда-либо видели.
Рой: робототехника роя очень похожа на имитацию группы насекомых или муравьев в виде крошечных устройств, которые ползают вместе и формируют определенные конструкции. Их можно использовать в таких областях, как сельское хозяйство, спасательные работы или военные операции.
Пример: Гарвардский университет разработал рой из 1024 крошечных роботов, которые могли создавать определенные образования, такие как алфавиты, пятиконечные звезды и другие сложные конструкции, без какого-либо центрального интеллекта.

Сегодня существует множество роботов различных форм, размеров и конструкций, но все они подвержены определенным проблемам.
Например, роботы, участвующие в специальных конкурсах робототехники, эффективно выполняли задачи, подобные людям, но у них не было надлежащей системы для восприятия окружающей среды, и они просто следовали инструкциям оператора.
Кроме того, существуют мини-роботы, такие как Darwin, разработанные ROBOTIS, которые довольно хорошо умеют ходить, играть в футбол и даже вставать после падения, но их нельзя использовать в приложениях, требующих физической силы. Также есть робот по имени Cozmo от Anki, который даже может выражать чувства и играть, но это просто робот для развлечения.
Задачи, возложенные на роботов, включают в себя вождение автомобиля, прогулку по неровной дороге, расчистку мусора, поворот клапанов, подключение шлангов, открытие дверей, просверливание дыры, подъем по лестнице. Хотя это легко для людей, то же самое для роботов чрезвычайно сложно.
Чтобы робот сделал всего один шаг, требуются сотни и тысячи строк кода. Кроме того, люди начали ходить после нескольких лет эволюции, и даже сейчас, когда рождается ребенок, требуется больше года, чтобы научиться ходить в совершенстве. Итак, существует еще много технических проблем и препятствий, которые необходимо преодолеть ученым и инженерам.
Многие люди считают, что активная разработка и массовое внедрение роботов отнимут у людей множество рабочих мест. Однако Шерри Теркл, профессор Массачусетского технологического института, говорит, что роботы - это не заменители, а спутники людей, и их развитие скорее приведет к созданию дополнительных рабочих мест.
Еще одна проблема заключается в том, что нам нужно установить ограничение на характер задач, которые назначаются роботам. Логично использовать их в местах, которые слишком опасны для людей. Несомненно, технология всегда предлагала множество преимуществ и играет важную роль в нашей жизни, но не менее важно также определить пределы ее использования.


Робототехника в современном мире

Автор работы награжден дипломом победителя III степени
Текст работы размещён без изображений и формул.
Полная версия работы доступна во вкладке "Файлы работы" в формате PDF
Робототе́хника (от робот и техника ; англ. robotics — роботика , роботехника ) — прикладная наука , занимающаяся разработкой автоматизированных технических систем и являющаяся важнейшей технической основой развития производства.
Робототехника опирается на такие дисциплины:
Выделяют строительную, промышленную, бытовую, медицинскую, авиационную и экстремальную (военную, космическую, подводную) робототехнику.(Википедия)
В робототехнике соединяются механика, система управления и искусственный интеллект, поэтому она является важнейшим направлением научно-технического прогресса. Робототехнику требуются знания в вышеперечисленных дисциплинах, в результате робототехник, в отличие от узкого специалиста, обладает широким кругозором и системным мышлением.
Робот – устройство, управляемое с помощью электронной платы или компьютера, который можно запрограммировать на выполнение определенных операций. Он является электромеханическим, гидравлическим, пневматическим устройством или их сочетанием, в зависимости от сферы применения, предназначенный для замены человека или облегчения его труда.
Управление роботами делится на:
телеуправление – то есть с участием человека;
Существует три класса устройств робототехники, это сборные устройства, манипуляторы и уже готовые работы.
Системы управления робототехнических устройств строятся на том же техническом базисе, что и все другие автоматические устройства. В отличие от автоматов робот не просто следует заранее вложенному в него алгоритму, а способен воспринимать внешние сигналы и в соответствии с ними адаптировать свои действия в изменяющейся ситуации. Важно понимать, что на данный момент ещё нет универсальных роботов, которых можно было бы использовать для любой задачи. Инженеры-изобретатели разрабатывают и программируют роботов отдельно для каждой конкретной задачи.
По уровню применения робототехника подразделяется на:
Игровая робототехника может быть предназначена для детей и для взрослых. Игровая робототехника для детей направлена на выработку у них интереса к программированию и инженерным наукам. Игровая робототехника может быть полезна и для взрослых, так как её применение может способствовать выработке навыков поведения в типичных жизненных и опасных ситуациях.
В рамках обучающей робототехники используются робототехнические комплекты для детских, учебных и досуговых центров на базе Huna, Lego, Fishertechnik, Arduino. Например, компания LEGO выпустила первый робототехнический конструктор в рамках новой линейки конструкторов MINDSTORMS в 1998 году, открывая детям дверцу в волшебный мир роботов.
Актуальность темы.
В 21веке робототехника используется во всех видах промышленности, строительства, быта, авиации, особенно в экстремальных сферах деятельности человечества таких, как военная, космическая и подводная.
Цель реферата.
Целью реферата является рассмотрение видов и типов роботов, а также сферы их использования в современном мире.
Строительная робототехника.
Строительная робототехника, как это понятно из её названия, связана со сферой строительства. То есть работа идёт над разработкой роботов, которых можно будет использовать как при строительстве различных объектов, так и, что интересно, при их разрушении. Трудоёмкость обоих этих процессов высока, да и технологичность каждой операции процесса строительства должна быть на должном уровне. Поэтому использование роботов в этой сфере поможет соблюдать установленные технические стандарты и требования, а также может помочь максимально исключить ошибки, допускаемые из-за человеческого фактора.
Промышленная робототехника.
Промышленные роботы уже активно используются на заводах и фабриках, при производстве игрушек, чайников, мотоциклов, конфет, а также в производстве действительно сложных изделий, например, автомобилей. Роботы могут без помощи человека варить металл, штамповать, собирать по частям готовые продукты, всё это происходит благодаря особым конструкциям и программам, которые определяют функционал каждого робота. Говоря иными, а именно научными словами, такие устройства предназначены для автоматизации производства — изготовления чего-либо без помощи человека.
Бытовая робототехника.
Роботы для использования в домохозяйствах, включая персональных роботов, как правило, узкоспециализированные - каждый под какой-то один вид деятельности. В перспективе можно ожидать появления многофункциональных, универсальных роботов, способных выполнять различные виды деятельности. Жаргонное название - "домашники". Отличаются многообразием видов, в зависимости от назначения. Они могут быть: помощниками для пожилых людей, дворецкими, кухонными работниками, охранниками и т.д.
В данное время всё усиливается спрос на умные дома, они позволяют быстро реконфигурировать одно и то же помещение в соответствие с текущими задачами в режиме реального времени. Электроприводы, повинующиеся заложенной программе или нажатию кнопок в приложении, выдвигают из недр робо-комплекса кроватили или столы, настраивают конфигурацию шкафов и полок. А в роботизированном доме даже перегородки между комнатами могут передвигаться так, как нужно сейчас хозяину. Как в ручном режиме, так и автоматически, например, в таком доме занавески раздвинутся как раз тогда, когда хозяин встает, одновременно включится, например, кофеварка.
Медицинская робототехника.
Главной целью развития медицинской робототехники является высокая точность и повышение эффективности лечения, уменьшение рисков нанесения вреда здоровью человека. В настоящее время роботы играют колоссальную роль в развитии современной медицины. Они способствуют точной работе при операциях, помогают провести диагностику и поставить правильный диагноз. Заменяют отсутствующие конечности и органы, восстанавливают и улучшают физические возможности человека, снижают время на госпитализацию, обеспечивают удобство, быстроту реагирования и комфорт, экономят финансовые затраты на обслуживание. Вот некоторые роботы применяемые в медицине: роботы хирурги, роботизированные протезы, нанороботы и многие другие медицинские роботы.
Авиационная робототехника.
Авиация в плане роботизации не отстаёт от других сфер деятельности человека.
В нынешнее время очень популярным являются беспилотные летательные аппараты (БПЛА). БПЛА - беспилотный летательный аппарат военного назначения, разновидность военного робота. В задачу этих автономных систем, созданных для полёта, входит выполнение миссий, потенциально опасных для человека.
Также в авиации широко используются промышленные роботы, задействованные в производстве, обслуживании и ремонте самолётов.
Военная робототехника.
К группе военных роботов относят всевозможные беспилотные разведчики, машины для минирования и разминирования местности. Был разработан даже настоящий робот-медик. Называется этот робот Bloodhound, а предназначен он для оказания помощи раненым, к которым невозможно приблизиться врачам из-за сильного огня со стороны противника. Bloodhound оснащён видеокамерами, радиостанцией с микрофоном и динамиками, а также стетоскопом. Все эти элементы робота позволяют медикам дистанционно управлять им, проводить первичный осмотр раненого и даже беседовать с ним. После постановки диагноза Bloodhound может остановить кровотечение (например, наложить повязку на рану) и сделать назначенный укол, который позволит раненому дождаться эвакуации. Благодаря таким роботам можно спасти огромное количество человеческих жизней.
В 2004 российские инженеры создали робота, способного обнаруживать и обезвреживать взрывные устройства. Такой робот способен проникать и доставлять в труднодоступные зоны средства наблюдения и разведки, а также осматривать подозрительные объекты и в случае необходимости осуществлять их транспортировку до места назначения или разминирование. Робот может работать индивидуально или в группе таких же машин.
Космическая робототехника.
Космороботы – это роботы, приспособленные работать в космическом пространстве. Преимущество космических роботов перед человеком заключается в том, что они могут работать в крайне неблагоприятных условиях и обходиться без каких-либо ресурсов, так как в большинстве случаев они работают на солнечных батареях. Также гораздо легче будет пережить потерю такого робота, чем гибель астронавта. Обычно, задача косморобота заключается в проведении какой-нибудь научной деятельности. Вообще-то, тоже самое может сделать и обычный робот, работающий на земной поверхности, но к космороботу есть несколько основных требований, которым он должен соответствовать.
функционировать в сложных условиях враждебной среды;
весить как можно меньше;
потреблять мало энергии и иметь долгий срок службы;
работать в автоматическом режиме;
обладать чрезвычайной надежностью;
Для того, чтобы соответствовать всем этим требованиям, учёные создают все новые и новые устройства, механизмы, приводы, микроконтроллеры, обладающие высокой прочностью и использующим как можно меньше энергии. Эксперты подсчитали, что отправление на Марс человека будет стоить примерно 200-300 миллиардов долларов, при том, что это будет безвозвратное отправление. Еще придется потратить несколько месяцев на психологическую адаптацию участников экспедиции. А отправка корабля, на борту которого будет робот, обойдется примерно в 5-10 миллиардов долларов. Так что роботы в космосе обходятся намного дешевле, чем люди.
Подводная робототехника.
В современной жизни человек уже использует роботов во всех сферах своей деятельности. В большинстве своём роботы являются не заменимыми помощниками, но всё чаще они используются там, где человек справлялся без особого труда. Благодаря своему интеллекту человек развил науку, и смог создать робототехнику, но из-за своей лени он всё чаще стремится заменить свой труд роботами. Но и этого человеку мало, теперь человек пытается создать, для своих роботов, искусственный интеллект. С искусственным интеллектом роботы смогут самостоятельно оценивать происходящее вокруг них и принимать решения по действиям, которые им необходимо произвести. Человеку не надо уже будет тратить силы и время на подачу необходимых команд и алгоритмов. Но такое положение дел может привести к деградации человечества, а возможно и исчезновения, как вида, с лица земли. Вполне возможно, что великие достижения человеческого разума и человеческая лень, могут обернуться против самого человека.
Прейко М., Устройства управления роботами: схемотехника и программирование – М.: Издательство ДМК, 2004, 202с.
Робототехника в современном мире
Автор работы награжден дипломом победителя III степени
Текст работы размещён без изображений и формул.
Полная версия работы доступна во вкладке "Файлы работы" в формате PDF
Робототе́хника (от робот и техника ; англ. robotics — роботика , роботехника ) — прикладная наука , занимающаяся разработкой автоматизированных технических систем и являющаяся важнейшей технической основой развития производства.
Робототехника опирается на такие дисциплины:
Выделяют строительную, промышленную, бытовую, медицинскую, авиационную и экстремальную (военную, космическую, подводную) робототехнику.(Википедия)
В робототехнике соединяются механика, система управления и искусственный интеллект, поэтому она является важнейшим направлением научно-технического прогресса. Робототехнику требуются знания в вышеперечисленных дисциплинах, в результате робототехник, в отличие от узкого специалиста, обладает широким кругозором и системным мышлением.
Робот – устройство, управляемое с помощью электронной платы или компьютера, который можно запрограммировать на выполнение определенных операций. Он является электромеханическим, гидравлическим, пневматическим устройством или их сочетанием, в зависимости от сферы применения, предназначенный для замены человека или облегчения его труда.
Управление роботами делится на:
телеуправление – то есть с участием человека;
Существует три класса устройств робототехники, это сборные устройства, манипуляторы и уже готовые работы.
Системы управления робототехнических устройств строятся на том же техническом базисе, что и все другие автоматические устройства. В отличие от автоматов робот не просто следует заранее вложенному в него алгоритму, а способен воспринимать внешние сигналы и в соответствии с ними адаптировать свои действия в изменяющейся ситуации. Важно понимать, что на данный момент ещё нет универсальных роботов, которых можно было бы использовать для любой задачи. Инженеры-изобретатели разрабатывают и программируют роботов отдельно для каждой конкретной задачи.
По уровню применения робототехника подразделяется на:
Игровая робототехника может быть предназначена для детей и для взрослых. Игровая робототехника для детей направлена на выработку у них интереса к программированию и инженерным наукам. Игровая робототехника может быть полезна и для взрослых, так как её применение может способствовать выработке навыков поведения в типичных жизненных и опасных ситуациях.
В рамках обучающей робототехники используются робототехнические комплекты для детских, учебных и досуговых центров на базе Huna, Lego, Fishertechnik, Arduino. Например, компания LEGO выпустила первый робототехнический конструктор в рамках новой линейки конструкторов MINDSTORMS в 1998 году, открывая детям дверцу в волшебный мир роботов.
Актуальность темы.
В 21веке робототехника используется во всех видах промышленности, строительства, быта, авиации, особенно в экстремальных сферах деятельности человечества таких, как военная, космическая и подводная.
Цель реферата.
Целью реферата является рассмотрение видов и типов роботов, а также сферы их использования в современном мире.
Строительная робототехника.
Строительная робототехника, как это понятно из её названия, связана со сферой строительства. То есть работа идёт над разработкой роботов, которых можно будет использовать как при строительстве различных объектов, так и, что интересно, при их разрушении. Трудоёмкость обоих этих процессов высока, да и технологичность каждой операции процесса строительства должна быть на должном уровне. Поэтому использование роботов в этой сфере поможет соблюдать установленные технические стандарты и требования, а также может помочь максимально исключить ошибки, допускаемые из-за человеческого фактора.
Промышленная робототехника.
Промышленные роботы уже активно используются на заводах и фабриках, при производстве игрушек, чайников, мотоциклов, конфет, а также в производстве действительно сложных изделий, например, автомобилей. Роботы могут без помощи человека варить металл, штамповать, собирать по частям готовые продукты, всё это происходит благодаря особым конструкциям и программам, которые определяют функционал каждого робота. Говоря иными, а именно научными словами, такие устройства предназначены для автоматизации производства — изготовления чего-либо без помощи человека.
Бытовая робототехника.
Роботы для использования в домохозяйствах, включая персональных роботов, как правило, узкоспециализированные - каждый под какой-то один вид деятельности. В перспективе можно ожидать появления многофункциональных, универсальных роботов, способных выполнять различные виды деятельности. Жаргонное название - "домашники". Отличаются многообразием видов, в зависимости от назначения. Они могут быть: помощниками для пожилых людей, дворецкими, кухонными работниками, охранниками и т.д.
В данное время всё усиливается спрос на умные дома, они позволяют быстро реконфигурировать одно и то же помещение в соответствие с текущими задачами в режиме реального времени. Электроприводы, повинующиеся заложенной программе или нажатию кнопок в приложении, выдвигают из недр робо-комплекса кроватили или столы, настраивают конфигурацию шкафов и полок. А в роботизированном доме даже перегородки между комнатами могут передвигаться так, как нужно сейчас хозяину. Как в ручном режиме, так и автоматически, например, в таком доме занавески раздвинутся как раз тогда, когда хозяин встает, одновременно включится, например, кофеварка.
Медицинская робототехника.
Главной целью развития медицинской робототехники является высокая точность и повышение эффективности лечения, уменьшение рисков нанесения вреда здоровью человека. В настоящее время роботы играют колоссальную роль в развитии современной медицины. Они способствуют точной работе при операциях, помогают провести диагностику и поставить правильный диагноз. Заменяют отсутствующие конечности и органы, восстанавливают и улучшают физические возможности человека, снижают время на госпитализацию, обеспечивают удобство, быстроту реагирования и комфорт, экономят финансовые затраты на обслуживание. Вот некоторые роботы применяемые в медицине: роботы хирурги, роботизированные протезы, нанороботы и многие другие медицинские роботы.
Авиационная робототехника.
Авиация в плане роботизации не отстаёт от других сфер деятельности человека.
В нынешнее время очень популярным являются беспилотные летательные аппараты (БПЛА). БПЛА - беспилотный летательный аппарат военного назначения, разновидность военного робота. В задачу этих автономных систем, созданных для полёта, входит выполнение миссий, потенциально опасных для человека.
Также в авиации широко используются промышленные роботы, задействованные в производстве, обслуживании и ремонте самолётов.
Военная робототехника.
К группе военных роботов относят всевозможные беспилотные разведчики, машины для минирования и разминирования местности. Был разработан даже настоящий робот-медик. Называется этот робот Bloodhound, а предназначен он для оказания помощи раненым, к которым невозможно приблизиться врачам из-за сильного огня со стороны противника. Bloodhound оснащён видеокамерами, радиостанцией с микрофоном и динамиками, а также стетоскопом. Все эти элементы робота позволяют медикам дистанционно управлять им, проводить первичный осмотр раненого и даже беседовать с ним. После постановки диагноза Bloodhound может остановить кровотечение (например, наложить повязку на рану) и сделать назначенный укол, который позволит раненому дождаться эвакуации. Благодаря таким роботам можно спасти огромное количество человеческих жизней.
В 2004 российские инженеры создали робота, способного обнаруживать и обезвреживать взрывные устройства. Такой робот способен проникать и доставлять в труднодоступные зоны средства наблюдения и разведки, а также осматривать подозрительные объекты и в случае необходимости осуществлять их транспортировку до места назначения или разминирование. Робот может работать индивидуально или в группе таких же машин.
Космическая робототехника.
Космороботы – это роботы, приспособленные работать в космическом пространстве. Преимущество космических роботов перед человеком заключается в том, что они могут работать в крайне неблагоприятных условиях и обходиться без каких-либо ресурсов, так как в большинстве случаев они работают на солнечных батареях. Также гораздо легче будет пережить потерю такого робота, чем гибель астронавта. Обычно, задача косморобота заключается в проведении какой-нибудь научной деятельности. Вообще-то, тоже самое может сделать и обычный робот, работающий на земной поверхности, но к космороботу есть несколько основных требований, которым он должен соответствовать.
функционировать в сложных условиях враждебной среды;
весить как можно меньше;
потреблять мало энергии и иметь долгий срок службы;
работать в автоматическом режиме;
обладать чрезвычайной надежностью;
Для того, чтобы соответствовать всем этим требованиям, учёные создают все новые и новые устройства, механизмы, приводы, микроконтроллеры, обладающие высокой прочностью и использующим как можно меньше энергии. Эксперты подсчитали, что отправление на Марс человека будет стоить примерно 200-300 миллиардов долларов, при том, что это будет безвозвратное отправление. Еще придется потратить несколько месяцев на психологическую адаптацию участников экспедиции. А отправка корабля, на борту которого будет робот, обойдется примерно в 5-10 миллиардов долларов. Так что роботы в космосе обходятся намного дешевле, чем люди.
Подводная робототехника.
В современной жизни человек уже использует роботов во всех сферах своей деятельности. В большинстве своём роботы являются не заменимыми помощниками, но всё чаще они используются там, где человек справлялся без особого труда. Благодаря своему интеллекту человек развил науку, и смог создать робототехнику, но из-за своей лени он всё чаще стремится заменить свой труд роботами. Но и этого человеку мало, теперь человек пытается создать, для своих роботов, искусственный интеллект. С искусственным интеллектом роботы смогут самостоятельно оценивать происходящее вокруг них и принимать решения по действиям, которые им необходимо произвести. Человеку не надо уже будет тратить силы и время на подачу необходимых команд и алгоритмов. Но такое положение дел может привести к деградации человечества, а возможно и исчезновения, как вида, с лица земли. Вполне возможно, что великие достижения человеческого разума и человеческая лень, могут обернуться против самого человека.
Прейко М., Устройства управления роботами: схемотехника и программирование – М.: Издательство ДМК, 2004, 202с.
Читайте также: