
Реферат на тему кулачковый механизм
Обновлено: 03.07.2024
Рецензент д.т.н., проф. Плахтин В.Д.
Авторы: Г.А. Тимофеев, М.В. Самойлова
г Московский государственный технический университет
Исходные данные, основные требования и
этапы проектирования . 4
2. Выбор закона движения толкателя . 7
3. Определение кинематических передаточных функций
кулачкового механизма . 13
4. Определение основных размеров кулачкового механизма
из условия ограничения угла давления . 20
5. Определение координат профиля кулачка . 29
6. Описание программы расчета кулачкового механизма
7. Проектирование кулачковых механизмов графическим
8.Рекомендуемая последовательность проектирования
кулачкового механизма . 46
Кулачковые механизмы - плоские или пространственные механизмы с одной высшей кинематической парой, выполняющие самые разные функции, получившие широкое распространение в механизмах перемещения рабочих органов различных машин-автоматов, в устройствах подачи станков, механизмах газораспределения двигателей внутреннего сгорания и во многих других случаях, когда требуется получить возвратно- вращательное или возвратно-поступательное движение ведомого звена по заданному закону. Воспроизведение движения ведомого звена (толкателя) кулачковые механизмы осуществляют теоретически точно. Их ведущее звено называется кулачком.
Кулачковый механизм, в большинстве случаев, является составной частью проектируемой машины. Он может использоваться как основной, но чаще является вспомогательным механизмом для выполнения технологической операции, последовательность и продолжительность которой согласуется с движением звеньев основного механизма.
Поэтому проектирование кулачковых механизмов выполняется после того, как предварительно намечена общая компоновка машины, спроектированы ее рабочие органы, установлена продолжительность и последовательность выполнения элементов движения ведомого звена кулачкового механизма, выбран закон движения.
Проектирование кулачкового механизма заключается в определении взаимного расположения ведущего звена (кулачка), ведомого звена (толкателя) и координат профиля кулачка, обеспечивающих заданный закон движения толкателя. При этом должны быть удовлетворенны требования, определяющиеся технологическим процессом и эксплуатационными показателями механизма. Эти требования отражаются в исходных данных для проектирования.
Проектное решение оценивается комплексом показателей, таких как, размеры, взаимозаменяемость деталей, их прочность, долговечность, стоимость и т.д. Получить решение, в котором все эти показатели являются оптимальными, невозможно. Поэтому оптимизируют один или несколько показателей с обеспечением выполнения ограничений по остальным показателям. Применение системы автоматизированных расчетов курсового проектирования [1] позволяет рассматривать при проектировании многовариантные решения и выбирать наилучший вариант конструкции.
В данном учебном пособии рассмотрена методика проектирования кулачковых механизмов с оптимизацией по габаритам. Дополнительное условие синтеза - обеспечение допустимых углов давления на входное звено во всех положениях механизма, т.е. обеспечение отсутствия заклинивания кулачкового механизма. Наряду с аналитическим методом, реализованным на ЭВМ в диалоговом режиме, дается и графический.
1. Исходные данные, основные требования и этапы проектирования
В комплексных заданиях на курсовой проект (работу) содержатся следующие исходные данные:
Структурная схема кулачкового механизма, показывающая характер взаимосвязей звеньев и их относительное расположение, тип кулачка, вид толкателя и характер его движения. Ведущим звеном в кулачковом механизме (рис. 1, 2) является дисковый кулачок 1, ведомым - толкатель 2, снабженный роликом 3. Толкатель может совершать поступательное (рис. 1) или вращательное (рис. 2) движение.
Максимальное перемещение толкателя - ход толкателя h (рис. 1, 2) или угол поворота толкателя b (рис. 2)
Длина толкателя 2 в случае вращательно перемещающегося толкателя или внеосность е в случае поступательно движущегося толкателя.
Фазовые углы: угол рабочего профиля кулачка и его составляющие - при удалении , при дальнем стоянии , и сближении , которые назначаются в соответствии с циклограммой, отражающей согласованность перемещений исполнительных звеньев механизма.
Закон движения толкателя в виде графика изменения ускорения толкателя в зависимости от угла поворота кулачка. Закон движения определяется конкретной технологической операцией, для выполнения которой предназначен проектируемый механизм.
Допустимый угол давления [J].
Направление вращения кулачка и частота его вращения в с -1 .
При проектировании кулачковых механизмов необходимо соблюдать следующие основные требования:
проектируемый механизм должен обеспечивать заданный закон движения;
механизм должен иметь наименьшие габариты при достаточной надежности работы;
детали, составляющие механизм, должны быть технологичными, а их сборка - простой.
Проектирование кулачкового механизма делится на три основных этапа:
Определение кинематических передаточных функций, характеризующих изменение ускорения, скорости и перемещения толкателя, в функции времени или угла поворота кулачка.
Определение основных размеров кулачкового механизма - минимального радиуса кулачка , внеосности или межосевого расстояния w, при которых углы давления не превышают допустимых значений.
Определение координат профиля кулачка.
Проектирование кулачкового механизма может быть выполнено графическим методом либо по аналитическим зависимостям с применением ЭВМ. В учебных целях при выполнении курсового проекта используют сочетание графических методов определения параметров кулачкового механизма с анализом математических моделей и выполнением расчетов на ЭВМ.
Применение графического метода позволяет предварительно изучить алгоритм реализации поставленной задачи, выявить связи между отдельными параметрами и сформировать математическую модель для составления программы расчета на ЭВМ. В итоге расчетов на ЭВМ студент получает таблицу результатов, которые ему следует проанализировать и сравнить с результатами графических построений и вычислений.
Выбор закона движения толкателя
При проектировании профиля кулачка обычно задаются законом движения толкателя. Выбор закона движения определяется главным образом теми требованиями, которые предъявляет технологический процесс к движению толкателя. В качестве требуемого закона движения можно принять определенный тип кривой перемещения, скорости или ускорения. Динамика кулачковых механизмов в основном определяется законами изменения ускорений (так как с ускорениями толкателя связаны пропорциональные им и массе толкателя силы инерции, учитывать которые приходиться при расчете замыкающих пружин, при определении напряжений в деталях механизма и т.д.), поэтому обычно в качества закона движения толкателя задаются кривой (или уравнением) относительных ускорений толкателя. Технологические соображения в большинстве случаев заставляют обращаться к сложным законам движения.
В табл. 1. 5 приведены некоторые законы движения толкателя, представленные в виде безразмерных коэффициентов относительных значений ускорений и угла поворота Ку на фазе удаления. Коэффициент угла поворота Ку = j1р / jу меняется в пределах от 0 до I, а коэффициент ускорения в пределах может изменяться по величине и по знаку. Для приведенных примеров вначале, а также в промежуточных положениях ускорение может изменяться скачком на конечную величину (мягкий удар за счет мгновенного изменения силы инерции). Для ряда законов ускорение меняется скачком в конце фазы удаления, в других случаях скачки на графиках ускорений могут отсутствовать.
Кинематические характеристики кулачкового механизма при задании функций через безразмерные коэффициенты могут быть представлены на фазе удаления в следующем виде:
кинематическая передаточная функция скорости толкателя -
кинематическая передаточная функция ускорения толкателя
Связь между кинематическими параметрами толкателя - ускорением , скоростью и перемещением определяется известными соотношениями:
где Т - время одного оборота кулачка.
Так как закон изменения скорости кулачка неизвестен, приведенные зависимости нельзя использовать непосредственно, но их можно выразить через кинематические передаточные функции, которые не зависят от времени:
При расчете размеров и координат профиля кулачка кулачкового механизма определяющими являются ход толкателя, угол рабочего профиля кулачка и функциональная зависимость ускорения (относительного ускорения) толкателя от угла поворота кулачка. Если задать эту зависимость в аналитической форме, то последующим интегрированием могут быть получены зависимости кинематической передаточной функции скорости и перемещения толкателя.
Любую непрерывную дифференцируемую функцию вида можно представить разложением в ряд:
(1) - полиномиальное разложение;
(2) - разложение в тригонометрический ряд;
Двойное интегрирование выражений (1) и (2) позволяет получить
где С1 , С2 - константы интегрирования.
Если предположить что , то интегралы от Р из формул (3) . (6) можно исключить. Таким образом, имея зависимости вида (1) или (2), легко получить аналитические зависимости вида (3) или (4) и зависимости вида (5) или (6).
В программе QUL реализован алгоритм, вычисляющий значения первого и второго интеграла относительного ускорения толкателя для определения углов поворота кулачка. Следует заметить что в общем виде может иметь точки разрыва. При этом функция при разбивается на участки
где - индекс участка (режима).
Так что функция - кусочно-непрерывная дифференцируемая функция в области своего определения , каждый - й участок называется режимом, при этом
Чтобы избежать неопределенности в задании функции , отрезки открыты справа. Для обеспечения задания функции на - ом режиме предполагается, что . Требование не является обязательным.
Точность интегрирования определяется не шагом по углу поворота, а точностью задания функции на участке, т.е. величиной .
Если исходная функция заданна в виде графика или таблицы значений, то решение получают при помощи численных или графических методов. Для определения передаточной функции скорости толкателя интегрируют заданную функцию ускорения толкателя, интегрируя полученную функцию скорости, находят функцию перемещения толкателя. Обычно применяется численное интегрирование методом трапеций по формулам:
где - приращение угла поворота кулачка на шаге интегрирования,
N - число равноотстоящих точек, в которых заданны значения переменной.
В течение цикла движения толкатель кулачкового механизма должен переместиться из начального положения на величину хода h , а затем возвратиться в исходное положение, то есть перемещение толкателя на фазе удаления равно перемещению на фазе сближения. Следовательно, график кинематической передаточной функции скорости должен удовлетворять условию:
где jсо -угловая координата начальной точки фазы сближения.
Скорость и кинематическая передаточная функция скорости толкателя на фазах ближнего и дальнего выстоя равны нулю. Чтобы эти условия выполнялись необходимо выполнить соотношения
где jyp - угловое перемещение при разгоне на фазе удаления;
jср - угловое перемещение при разгоне на фазе сближения;
jст = jраб - (jсо + jср) - угловое перемещение при торможении на фазе сближения.
Эти условия необходимо учитывать при построении безразмерных графиков передаточной функции скорости и передаточной функции ускорения, выравнивая соответствующие указанным интегралам площади над осью абсцисс и под ней.
При работе над листом проекта с использованием графического интегрирования (рис. 3) все три графика располагают один под другим на одинаковой базе по оси абсцисс, которую удобно выбирать в пределах 150. 240 мм. График скорости толкателя (рис. 3б) получается (строится) методом графического интегрирования из графика ускорения толкателя. Для этого на продолжении оси t графика ускорений с левой стороны выбирается отрезок интегрирования К1 =30. 50 мм. После построения графика скорости строится график перемещений толкателя рис. 3в. Для этого также на продолжении оси абсцисс t графика откладывается отрезок интегрирования К2. Можно принимать К1 = К2. Или принять их равными mj. В зависимости от принятых отрезков интегрирования на графике ордината получается больше или меньше. Если частота вращения кулачка n1 (с -1 ) и максимальное перемещение (ход) толкателя h в исходных данных на проект заданы, то можно определить следующие масштабы:
Масштаб времени, мм / c , (7)
Масштаб перемещений, мм / м , (8)
Масштаб скорости, мм / мс -1 (9)
Масштаб ускорений, мм / мс -2 (10)
где - максимальная ордината с графика перемещений точки В центра ролика толкателя, мм;
- угол рабочего профиля кулачка в градусах;
- база графика, мм;
- частота вращения кулачка, c -1 .
Если в задании на проект значение угловой скорости или частоты вращения кулачка не заданы , то можно интегрировать заданный график по углу поворота кулачка и получить графики кинематических передаточных функций. Для перехода от вычисленных интегралов и к действительным значениям кинематической передаточной функции скорости и перемещения определяются масштабы, которые вычисляются с учетом заданного максимального перемещения ( хода ) толкателя h и максимального вычисленного перемещения из массива перемещений .
Масштаб угла поворота, мм / рад , (11)
Масштаб передаточной функции
скорости ,мм / м рад -1 , , (12)
Масштаб передаточной функции
ускорения, мм / м рад -2 , , (13)
где - угол рабочего профиля кулачка в радианах,
К1 ,К2 - отрезки интегрирования, мм.
В массиве отыскиваются максимальное и минимальное значения и соответствующие им углы и перемещения толкателя .
4. Определение основных размеров кулачкового механизма из условия ограничения угла давления
При выборе основных размеров кулачкового механизма - минимального радиуса кулачка , смещения оси толкателя относительно оси вращения кулачка или расстояния между осями вращения кулачка и толкателя w, стремятся получить минимально возможные значения углов давления , т.к. при этом уменьшаются реакции в кинематических парах, величина вращающего момента на валу кулачка, силы трения; повышается КПД и надежность механизма
Если Вам нужна помощь с академической работой (курсовая, контрольная, диплом, реферат и т.д.), обратитесь к нашим специалистам. Более 90000 специалистов готовы Вам помочь.
Кулачковые механизмы — плоские или пространственные механизмы с одной высшей кинематической парой, выполняющие самые разные функции, получившие широкое распространение в механизмах перемещения рабочих органов различных машин-автоматов, в устройствах подачи станков, механизмах газораспределения двигателей внутреннего сгорания и во многих других случаях, когда требуется получить возвратно- вращательное или возвратно-поступательное движение ведомого звена по заданному закону. Воспроизведение движения ведомого звена (толкателя) кулачковые механизмы осуществляют теоретически точно. Их ведущее звено называется кулачком.
Кулачковый механизм, в большинстве случаев, является составной частью проектируемой машины. Он может использоваться как основной, но чаще является вспомогательным механизмом для выполнения технологической операции, последовательность и продолжительность которой согласуется с движением звеньев основного механизма.
Поэтому проектирование кулачковых механизмов выполняется после того, как предварительно намечена общая компоновка машины, спроектированы ее рабочие органы, установлена продолжительность и последовательность выполнения элементов движения ведомого звена кулачкового механизма, выбран закон движения.
Проектирование кулачкового механизма заключается в определении взаимного расположения ведущего звена (кулачка), ведомого звена (толкателя) и координат профиля кулачка, обеспечивающих заданный закон движения толкателя. При этом должны быть удовлетворенны требования, определяющиеся технологическим процессом и эксплуатационными показателями механизма. Эти требования отражаются в исходных данных для проектирования.
1.1 ВИДЫ КУЛАЧКОВЫХ МЕХАНИЗМОВ
Кулачковым механизмом называется механизм, в состав которого входит кулачок (звено, рабочая поверхность которого имеет переменную кривизну). Зубчатый механизм можно рассматривать как многокулачковый механизм.
Кулачковые механизмы широко применяются в двигателях внутреннего сгорания, в текстильных машинах, в полиграфических машинах, в машинах – автоматах различного назначения, в разнообразных приборах. Достоинство кулачковых механизмов – возможность воспроизводить почти любой закон движения, причем синтез их относительно несложен. Недостатки – наличие высшей кинематической пары и, как следствие, ограниченная долговечность, сложность изготовления, высокая стоимость.
Кулачковый механизм состоит из кулачка (обычно вращающегося) и толкателя, совершающего возвратно – поступательное движение. Иногда толкатель совершает колебательное движение, в таком случае он называется колебателем или коромыслом. Для уменьшения трения толкатель снабжают роликом. Схемы кулачковых механизмов чрезвычайно разнообразны. Кулачковые механизмы бывают плоские и пространственные, с толкателем, имеющим рабочим элементом острие, ролик или плоскость, центральные и дезаксиальные (рис. 1.1).
Соприкосновение звеньев в кулачковом механизме обеспечивается силовым или геометрическим замыканием (рис. 1.2). Силовое замыкание осуществляется с помощью пружины. Геометрическое замыкание осуществляется с помощью паза, в котором помещается ролик толкателя. Недостатком такой конструкции является трудоемкость точного выполнения паза и наличие удара при реверсировании движения толкателя из-за неизбежного зазора между роликом и пазом. От этого недостатка свободен двухдисковый кулачок. Еще одну разновидность представляет диаметральный кулачок с рамочным толкателем. Его особенность состоит в том, что произвольно можно выбрать только часть профиля кулачка, оставшаяся часть профиля определяется из условия замыкания кулачка рамкой.
1.2 ЗАМЕНЯЮЩИЕ МЕХАНИЗМЫ
Кулачковый механизм может быть заменен кинематически эквивалентным рычажным механизмом. В основе такой замены лежит принцип замены механизма с вышей парой механизмом с низшими парами: через точку касания элементов высшей пары следует провести общую нормаль к профилям, в центрах кривизны профилей поместить шарниры или поступательные пары (если одним из профилей является прямая линия. Движение ведомых звеньев будет одинаковым в кулачковых и заменяющих их рычажных механизмах. Следует подчеркнуть, что речь идет о мгновенно заменяющих механизмах, так как в связи с непрерывным изменением радиуса кривизны кулачка меняется длина кривошипа и шатуна. Таким образом, задачу кинематического исследования кулачкового механизма можно свести к исследованию соответствующего рычажного механизма.
1.3 ЭЛЕМЕНТЫ ПРОФИЛЯ КУЛАЧКА
Несмотря на чрезвычайное разнообразие профилей кулачков можно указать общие для всех их элементы. Для всякого кулачка можно найти точки наиболее и наименее удаленные от центра вращения и указать соответствующие им максимальный радиус Rmax и минимальный радиус Rmin. Окружность радиусом Rmin называется окружностью минимального радиуса. Она играет важную роль при последующем анализе кулачковых механизмов. В моменты, когда толкатель контактирует с точками профиля, соответствующими Rmin и Rmax, он неподвижен. Если такая точка одна, то толкатель совершает мгновенную остановку, если таких точек много, так, что они образуют дугу радиуса Rmin или Rmax, имеет место нижний или верхний выстой.
Между периодами остановок (выстоев) лежат периоды подъема и опускания толкателя. Они соответствуют левому и правому рабочему профилю кулачка. Именно рабочий профиль определяет закон перемещения толкателя при подъеме или опускании. Соответствующие периоды называются фазами работы толкателя и на профиле кулачка определяются фазовыми углами: углом нижнего выстоя φнв, углом подьема φп, углом верхнего выстоя φвв, углом опускания φо.
Фазовые углы связаны соотношением
φп + φвв + φо + φнв = 360˚
Для любого кулачкового механизма диаграмма перемещений толкателя имеет характерный вид, представленный на рис. 1.3
Разнообразие законов движения достигается за счет различного сочетания длительностей фаз, а также различных законов подъема и опускания толкателя.
1.4 ВЫБОР ЗАКОНА ДВИЖЕНИЯ ТОЛКАТЕЛЯ
В ряде технологических машин, таких как текстильные, полиграфические и другие, закон движения полностью определен той операцией, для выполнения которой механизм предназначен. В таком случае выбор закона движения отпадает. Однако во многих случаях, например, в машинах – автоматах, автомобильных двигателях технологическим процессом задаются только фазовые углы и величины перемещений. Внутри каждой фазы подъема и опускания закон движения может быть произвольным, Тогда закон движения выбирается таким, чтобы механизм был оптимальным в динамическом отношении.
Простейшим законом является закон постоянной скорости (рис. 1.4). Скорость в точке 1 теоретически мгновенно изменяет направление, следовательно ускорение стремится к бесконечности. Практически из – за упругости звеньев изменение направления происходит за некоторый малый промежуток времени, поэтому ускорение не бесконечно, но велико, а следовательно и очень велика сила инерции. Это явление носит название жесткого удара. Такой закон движения может быть применен только для малоответственных тихоходных механизмов.
Жесткого удара можно избежать, если принять закон постоянного ускорения. Однако здесь мгновенно изменяется направление ускорения и следовательно – направление силы инерции. Это тоже проявляется в виде удара – “ мягкого удара”, который приводит к колебаниям и дополнительным динамическим нагрузкам. При применении закона косинусоидального ускорения в точке 1 сила инерции равна нулю, но мягкий удар в точке 2 все же происходит, если далее следует выстой толкателя.
Безударными будут синусоидальный закон и полиноминальный закон. Однако применение двух последних законов предъявляет очень высокие требования к точности изготовления кулачков.
Раньше обычно применялись кулачки, очерченные дугами сопряженных окружностей. Несмотря на то, что профиль таких кулачков был абсолютно гладким, в точках сопряжения происходили мягкие удары, так как имело место мгновенное изменение радиусов кривизны.
1.5 ИЗГОТОВЛЕНИЕ КУЛАЧКОВ
Кулачковые механизмы очень чувствительны к точности профиля кулачка. Поэтому они требуют особо тщательного изготовления. Основной метод изготовления кулачков – по точкам. На требуемом расстоянии от оси кулачка устанавливается фреза и производится обработка элемента профиля. Затем заготовка с помощью делительного устройства поворачивается на 0.5 – 1˚, фреза устанавливается в новое положение и так далее. Процесс очень трудоемок, так как требует большого числа установок. Возникающие при таком способе изготовления гребешки на профиле удаляются при последующей доработке. Для изготовления кулачков применяются также копировально-фрезерные станки и станки с числовым программным управлением. Профиль кулачка задается в числовом виде и автоматически воспроизводится на заготовке.
1.6 АНАЛИЗ КУЛАЧКОВЫХ МЕХАНИЗМОВ
Анализ кулачкового механизма состоит в определении кинематических параметров движения толкателя: перемещения, скорости и ускорения. Рассмотрим эту задачу на примере центрального кулачкового механизма с толкателем, имеющим острие (рис. 1.5).
Как видно из рисунка, для данного положения кулачкового механизма перемещение толкателя есть разность между радиус – вектором профиля кулачка и окружностью минимального радиуса. Для определения перемещения в другом положении следует повернуть кулачок и снова найти эту разность. Однако с целью облегчения построений удобно сообщить механизму обращенное движение со скоростью равной скорости вращения кулачка, но в обратном направлении. В таком случае кулачок будет оставаться неподвижным, а ось толкателя будет занимать последовательные положения 1, 2, 3…
За начало отсчета принимают точку отрыва профиля кулачка от окружности минимального радиуса. Обычно окружность разбивают на 12 частей. Части берутся равными, так как согласно формуле φ = ω t при постоянной скорости вращения углы поворота φ при равных интервалах времени тоже будут равными. Замерив перемещения и отложив их как ординаты, соединяют точки плавной кривой. Полученный график есть график s(φ) или в другом масштабе – график
s(t) Графики v(t) и a(t) получаются графическим дифференцированием графика s(t).
Если толкатель снабжен роликом, то следует рассмотреть эквивалентный механизм, у которого центр ролика как острие работает по центровому профилю кулачка. Центровым профилем называется траектория ролика в обращенном движении. Центровой профиль является эквидистантной кривой по отношению к действительному профилю. Расстояние между ними, измеренное по нормали к профилю, равно радиусу ролика.
Анализ кулачковых механизмов других видов принципиально подобен рассмотренному выше.
1.7 УГОЛ ДАВЛЕНИЯ И ЕГО СВЯЗЬ С РАЗМЕРАМИ КУЛАЧКА
Более важную для практики и в то же время более сложную задачу представляет синтез кулачкового механизма. Синтез кулачковых механизмов выполняется в два этапа. Первый этап – определение основных размеров механизма: минимального радиуса, диаметра ролика, длины колебателя, положение неподвижных элементов механизма. Второй этап – определение профиля кулачка по заданному закону движения. Определение минимального радиуса кулачка производится на основании угла давления.
Углом давления называется угол между направлением силы и направлением перемещения, вызванного этой силой. В случае кулачкового механизма сила действует по общей нормали, проведенной через точку касания ролика и кулачка, направление перемещения – по оси толкателя (рис. 1.6).Угол θ между этими направлениями – угол давления.
Перенесем силу Р по линии действия n – n в точку В и разложим на составляющие N и T. Сила Т является движущей силой для толкателя, сила N прижимает толкатель к направляющей, в результате чего возникает сила трения F.
T = P cos θ N = P sin θ F = f N
С увеличением угла θ движущая сила T уменьшается, сила N, а значит и сила трения F увеличивается. При некотором предельном значении угла θ движущая сила станет равной силе трения – толкатель застопорится.
F = T f P sin θ = P cos θ
Отсюда tgθ = 1/f, т.е. предельный угол давления определяется коэффициентом трения f. В правильно спроектированном кулачковом механизме угол давления значительно меньше предельного.
Практика рекомендует, исходя из рационального к.п.д., допустимый угол давления до 30° для механизмов с роликовым толкателем и до 45° — для механизмов с роликовым колебателем.
Выбирая соответствующие размеры кулачка, всегда можно удовлетворить поставленному требованию по углу давления. Выясни связь между размерами кулачка и углом давления Для этого рассмотрим эквивалентный исходному кулачковый механизм с острым толкателем, работающим по центровому профилю (рис. 1.6).
Построим план скоростей для этого механизма
Vb2 = Vb1 + Vb2, b1
Из плана скоростей следует
tg θ = Vb2 / Vb1 = Vb/ ω (Ro + s) (1.1)
Из анализа этой формулы следует, что между углом давления и минимальным радиусом существует нелинейная связь, такая, что с увеличением минимального радиуса Ro угол давления уменьшается. Уменьшение угла давления благоприятно сказывается на к.п.д. механизма, однако это достигается за счет увеличения его габаритов.
На основании этой формулы разработан графический прием определения минимального радиуса (рис. 1.7), используемый обычно при курсовом проектировании.
Исходя из графиков движения толкателя s(t) и v(t) методом исключения общего переменного строится график v(s), а затем. переходом к новой переменной ŝ = v / ω – график ŝ(s). Переменная ŝ называется аналогом скорости. Положительное направление оси ŝ берется по направлению вращения кулачка. В связи с тем, что размерность s и ŝ одинакова, масштабные коэффициенты по обеим осям выбираются также одинаковыми.
Если от точки О вниз отложить минимальный радиус, а затем точку О1 соединить линией с произвольной точкой 1 на графике, то эта линия образует с осью ординат угол θ – это вытекает из имеющегося соответствия отрезков на рис. 1.7 и формулы (1.1).
Максимальный угол давления получится, если из точки О1 провести касательную к левой части графика. Для кулачка с силовым замыканием достаточно рассмотреть левую часть графика, так как опасность заклинивания существует только на фазе подъема.
1.8 ОПРЕДЕЛЕНИЕ ОСНОВНЫХ РАЗМЕРОВ КУЛАЧКОВОГО МЕХАНИЗМА С КОЛЕБАТЕЛЕМ
В основе определения минимального радиуса для кулачкового механизма с колебателем также лежит рассмотренное выше соотношение между минимальным радиусом и углом давления. Различие заключается в своеобразии построения графика ŝ(s), учитывающем непрерывное изменение направлений s и ŝ.
Угол давления для такого механизма определится как угол между направлением общей нормали n – n и вектором скорости VB (рис. 1.8).
Построение графика s(ŝ) выполняется следующим образом. В выбранном масштабе строятся крайние положения колебателя В1С и В2С. Дуга В1В2, представляющая траекторию точки В, делится на равные части и через точки деления проводятся лучи из точки С. Для каждого положения колебателя соответствующий участок дуги и луч можно рассматривать как оси s и ŝ. Откладываем на лучах в принятом масштабе аналоги скорости ŝ, истинная величина которых рассчитывается по формуле
Значения ω2 берутся из имеющегося в нашем распоряжении графика ω2(φ2).
На фазе подъема аналоги скоростей откладываются от центра С, на фазе опускания 0 — к центру. В точках, где аналоги скоростей максимальны, строятся перпендикуляры к лучам и к ним под допустимым углом давления проводятся прямые линии.
Если выбрать центр вращения кулачка в заштрихованной зоне, то отрезок ОВ1 можно принять за минимальный радиус. В таком случае приближенно будет удовлетворяться допустимый угол давления. Выбрав положение очки О, мы тем самым определяем еще один размер механизма – расстояние между центрами вращения кулачка и колебателя – точками О и С. Рис 1.9
При проектировании механизмов часто нужно знать закон движения ведомого звена. Если проектируются механизмы с низшими кинематическими парами, то закон движения известен – это либо прямая линия (например, для строгания), либо окружность (сверление). Но чаще ведомое звено совершает сложное движение по заданному закону. По данной траектории и проектируют кулачковые механизмы.
Кулачковые механизмы получили широкое распространение в машинах и приборах. Например, в двигателях внутреннего сгорания (в механизмах газораспределения) они используются для открывания и закрывания впускных клапанов, в токарных полуавтоматах для регулирования хода резца и т.д. Поэтому, в зависимости от назначения, разновидностей кулачковых механизмов великое множество. Основное достоинство: простота изготовления и получение любой траектории ведомого звена – толкателя.
Простейший кулачковый механизм состоит из кулачковой шайбы 1 (или просто кулачка); ролика 2, который огибает кулачковую шайбу; толкателя 3 (штанги) и опоры 4 (рисунок 4.1 а ,б).
а - с поступательно движущимся центральным роликовым толкателем;
б - с поступательно движущимся смещенным роликовым толкателем;
в - с поступательно движущимся тарельчатым (плоским) толкателем;
г - с качающимся роликовым толкателем (с коромыслом).
Рисунок 4.1 - Схемы плоских кулачковых механизмов
Ведущее звено в кулачковых механизмах называется кулачком. На кинематических схемах кулачок обозначается цифрой 1. Ведомое звено называется толкателем, обозначается предпоследней цифрой.
По характеру движения толкателя кулачковые механизмы делятся:
1. с поступательно движущимся толкателем (рисунок 4.1, а-в);
2. с качающимся толкателем (рисунок 4.1, г).
Если траектория движения толкателя совпадает с осью вращения кулачка, то такой механизм называется кулачковым механизмом с центральным роликовым толкателем (рисунок 4.1, а). Если траектория движения толкателя не совпадает с осью вращения кулачка (образуется расстояние е – эксцентриситет или смещение), то такой механизм называется кулачковым механизмом со смещенным роликовым толкателем (рисунок 4.1, б).
Кулачок очерчен профилем. Профиль кулачка – сечение кулачка плоскостью, параллельной плоскости движения кулачка.
Кулачковые также как и все другие механизмы бывают:
1. Плоские – кулачковые механизмы, движение звеньев которых осуществляются в параллельных плоскостях (рисунок 4.1, а-г).
2. Пространственные – кулачковые механизмы, все точки которых движутся по замкнутым пространственным кривым (рисунок 4.2, а).
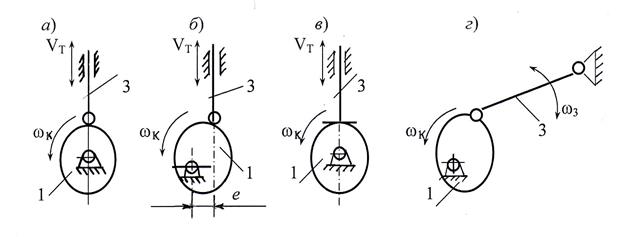
Плоские кулачковые механизмы также различают по характеру контакта кулачка и толкателя, а также по характеру движения кулачка и толкателя (таблица 4.1).
Таблица 4.1 - Классификация кулачковых механизмов по характеру контакта
| Характер движения кулачок- -толкатель | Вид контакта | |||
| Ролик | Прямая | Точка | Кривая | |
| В-В | ωК ωТ | ωК ωТ | ωК ωТ | ωК ωТ |
| В-П | ωК VT | ωК VT | ωК VT | ωК VT |
| П-В | ωТ VК | ωТ VК | ωТ VК | ωТ VК |
| П-П | VT VК | VT VК | VT VК | |
| Примечание. ωК, ωТ – угловые скорости кулачка и толкателя; VT, VК - линейные скорости толкателя и кулачка. |
По числу звеньев кулачковые механизмы делятся на
Ø простые – состоят из 3-х звеньев (рисунок 4.1).
Ø сложные – состоят из более чем 4-х звеньев (рисунок 4.2, б).
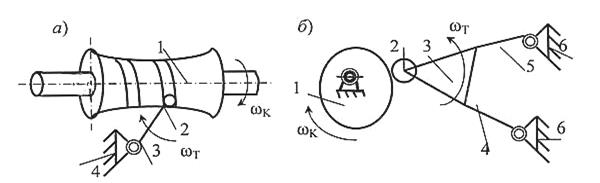
а - пространственный кулачковый механизм;
б - сложный кулачковый механизм.
При работе кулачковых механизмов необходимо постоянное соприкосновение ведущего и ведомого звеньев. Это касание может быть обеспечено: а) чисто геометрически, если выполнить кулачок в форме паза, боковые поверхности которого огибают ролик (рисунок 4.3, а);
б) с помощью пружины или силовое замыкание (рисунок 4.3, б).


а - с геометрическим замыканием с пазовым кулачком;
б - с геометрическим замыканием с двумя кулачками в рамке;
в - с силовым замыканием с поступательно движущимся толкателем;
г - с силовым замыканием с качающимся коромысловым толкателем.
Рисунок 4.3 - Плоские кулачковые механизмы
Достоинства кулачковых механизмов: простота конструкций; возможность получить любой закон движения толкателя.
Недостатки: быстрый износ в высшей кинематической паре.
При проектировании кулачковых механизмов решаются 2 задачи:
1. Анализ работы кулачкового механизма – по заданным размерам и профилю кулачка определяется закон движения ведомого звена (толкателя);
2. Синтез кулачкового механизма – по заданному закону движения толкателя определяются размеры кулачка.

Кулачко́вый механи́зм — механизм, образующий высшую кинематическую пару, имеющий подвижное звено, совершающее вращательное движение, — кулак (кулачок), с поверхностью переменной кривизны или имеющей форму эксцентрика, взаимодействующей с другим подвижным звеном — толкателем, если подвижное звено совершает прямолинейное движение, или коромыслом, если подвижное звено совершает качание. Кулак, совершающий прямолинейное движение, называется копиром.
Содержание
Классификация
Кулачковые механизмы подразделяют на 4 группы:
- По типу толкателя:
- с плоским толкателем,
- с роликовым (на рисунке),
- с игольчатым,
- с остроконечным.
- По характеру движения толкателя:
- возвратно-поступательное (на рисунке),
- качающееся.
- По характеру движения кулачка:
- возвратно-поступательное,
- качающееся,
- вращающееся (на рисунке).
- Кулачковые механизмы с роликовым толкателем бывают:
- дезаксиальные (ось кулачка не под толкателем),
- центральные (ось кулачка под толкателем) (на рисунке).
Основные характеристики кулачкового механизма — это максимальное перемещение толкателя (угол качания коромысла), максимальная скорость или ускорение исполнительного механизма и закон движения исполнительного механизма.
Кулачковый механизм имеет сходные черты с механизмом планшайба-стержни
Применения
Кулачковый механизм применяется в двигателях внутреннего сгорания в газораспределительном механизме, в металлорежущих станках и других машинах для воспроизведения сложной траектории движения рабочих органов и выполнения функций управления, таких как включение и выключение рабочих органов по определённой схеме.
См. также
Литература
- Механизмы
- Детали машин и механизмов
Wikimedia Foundation . 2010 .
Полезное
Смотреть что такое "Кулачковый механизм" в других словарях:
КУЛАЧКОВЫЙ МЕХАНИЗМ — механизм, подвижное звено которого (кулак) взаимодействует с другим подвижным звеном (толкателем). Кулачковый механизм осуществляет почти любой (заранее заданный) закон движения … Большой Энциклопедический словарь
Кулачковый механизм — механизм, в состав которого обычно входят два подвижных звена кулачок и толкатель и неподвижное звено стойка; К. м. осуществляют почти любой практически требуемый закон движения ведомого звена толкателя при непрерывном движении ведущего… … Большая советская энциклопедия
КУЛАЧКОВЫЙ МЕХАНИЗМ — механизм, подвижное звено к рого (кулак; или кулачок), имеющее поверхность перем. кривизны, взаимодействует с др. подвижным звеном (толкателем, или штангой), образуя высшую кинематическую пару. К. м. осуществляет почти любой (заранее заданный)… … Большой энциклопедический политехнический словарь
кулачковый механизм — Механизм, в состав которого входит кулачок. [Сборник рекомендуемых терминов. Выпуск 99. Теория механизмов и машин. Академия наук СССР. Комитет научно технической терминологии. 1984 г.] Тематики теория механизмов и машин Обобщающие термины виды… … Справочник технического переводчика
КУЛАЧКОВЫЙ МЕХАНИЗМ — кинематическая система тел (звеньев), подвижное звено которой ( (см.)), взаимодействуя с др. рабочим звеном (толкателем, штангой), позволяет изменять его движение соответственно заданному условию. Это свойство К. м. обеспечило его широкое… … Большая политехническая энциклопедия
кулачковый механизм — механизм, подвижное звено которого (кулак) взаимодействует с другим подвижным звеном (толкателем). Кулачковый механизм осуществляет почти любой (заранее заданный) закон движения. * * * КУЛАЧКОВЫЙ МЕХАНИЗМ КУЛАЧКОВЫЙ МЕХАНИЗМ, механизм, подвижное… … Энциклопедический словарь
кулачковый механизм — Механизм, в состав которого входит кулачок … Политехнический терминологический толковый словарь
кулачковый механизм — cam mechanism Механизм, содержащий по крайней мере один кулачок. Шифр IFToMM: 1.3.39 Раздел: СТРУКТУРА МЕХАНИЗМОВ … Теория механизмов и машин
КУЛАЧКОВЫЙ МЕХАНИЗМ — кинематическая пара, применяемая для преобразования вращения в заданный вид движения или изменение положения перемещаемых деталей. Представляет собой комбинацию асимметричных дисков или цилиндров; используется в различных механизмах, станках и… … Энциклопедия Кольера
Механизм Ватта — (анимация). См. также Лемниската Бернулли Механизм Уатта (механизм Ватта, параллелограмм Ватта) изобретён Джеймсом Уаттом (19 января 1736 25 августа 1819) для придания поршню паровой машины прямолинейного движения. Этот ме … Википедия
Читайте также: