
Определение элементов внешнего ориентирования снимка реферат
Обновлено: 02.07.2024
Различают элементы внутреннего и внешнего ориентирования снимка.
Элементы внутреннего ориентирования определяют положение центра проекции S относительно снимка. Ими являются координаты главной точки (х0) у0) в системе координат снимка и фокусное расстояние / объектива АФА (рис. 7.5). Эти элементы почти всегда известны с высокой точностью и записаны в паспорте
АФА. Например, /= 100,020 мм; XQ = -0,012 мм; у0 = +0,023 мм.
Элементы внутреннего ориентирования формируют связку проектирующих лучей. Ее положение в пространстве определяют элементы внешнего ориентирования снимка. Их шесть. Это три линейных элемента — геодезические координаты центра проекции
S\XS\YS\ZS 1 и три угловых элемента (рис. 7.6):
а — продольный угол наклона снимка (угол между осью Z и проекцией главного луча на плоскость XZ);
со — поперечный угол наклона снимка (угол между главным лучом и проекцией главного луча на плоскость XZ);
к — угол поворота снимка (угол на снимке между осью у и следом сечения плоскости снимка с плоскостью, построенной на главном луче и оси У).
Следует заметить, что для всех снимков, полученных данным АФА, элементы внутреннего ориентирования можно считать постоянными известными величинами. Однако элементы внешнего ориентирования у каждого снимка свои и, как правило, неизвестны
10. продольный и поперечный параллаксы точек. Применение параллаксов.
Пара горизонтальных снимков Р1и Р2, полученных с горизонтального базиса B = S1S2, с осями абсцисс, лежащими на одной прямой (идеальный случай съемки) в позитивном варианте, показана на рисунке 5.1.
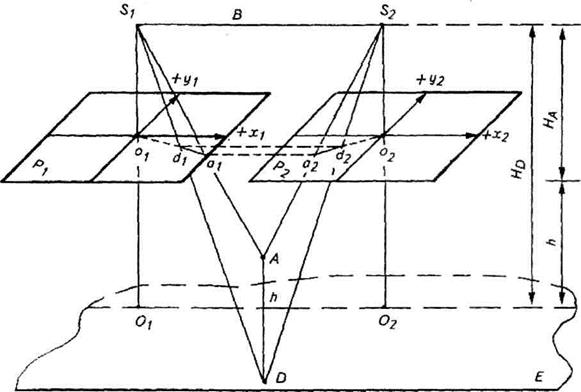
Рис. 5.1 - Изображение отвесной линии на паре снимков идеального случая съемки
Отвесная линия AD (на местности — столб, заводская труба и т. п.) отобразилась на снимках отрезками а1d2 и a2d2, направленными соответственно в точки ох и о2, так как точки надира n1и п2 на горизонтальных снимках совмещаются с главными точками. Точки а1 и а2 будут иметь равные ординаты У а1 =У а2 так как в идеальном случае съемки след сечения снимков базисной плоскостью будет параллелен общему направлению осей абсцисс этих снимков. Аналогичное равенство будет справедливым для любой пары соответственных точек.
Разность ординат соответственных точек пары снимков называют поперечным параллаксом точки Y1 – Y2 = qt(1)
Одна и та же пара снимков в различных ракурсах показана на рисунках 5.1 и 5.2.

Рис. 5.2- Координаты концов отвесной линии, изображенной на паре снимков
Из них видно, что абсциссы точек изображения изменяются в зависимости от высоты их положения относительно плоскости, принятой за начальную (плоскость Е). С увеличением геодезической отметки точки масштаб изображения элементов, лежащих в горизонтальной плоскости, проходящей через эту точку, будет укрупняться. Следовательно, через абсциссы точек пары снимков можно получить информацию о высотах точек и, в частности, о рельефе местности.
Разность абсцисс пары соответственных точек на левом и правом снимках называют продольным параллаксом точки
Элементы ориентирования снимка определяют положение его относительно пространственной прямоугольной системы координат OXYZ в момент фотографирования.
Различают элементы внутреннего и внешнего ориентирования снимка.
Элементы внутреннего ориентирования позволяют найти положение центра проекции относительно снимка. Как известно из предыдущего параграфа, к ним относятся координаты главной точки снимка и фокусное расстояние фотокамеры. Зная элементы внутреннего ориентирования, можно восстановить по снимку связку проектирующих лучей, существовавшую в момент фотографирования.
Элементы внешнего ориентирования определяют положение связки относительно пространственной прямоугольной системы координат в момент фотографирования.
Для аэроснимков используют две системы элементов внешнего ориентирования.

Первая система (рис. 19) содержит: XS,, YS,, ZS— координаты точки фотографирования, в которой находился центр проекции S; αо — угол наклона снимка или угол отклонения оптической оси фотокамеры от отвесной линии; t — дирекционный угол оптической оси фотокамеры — угол между осью SX и проекцией главного луча на плоскость SXY; — угол поворота снимка (на снимке угол между главной вертикалью и осью оу). Оси SX, SY и SZ параллельны соответствующим осям системы координат OXYZ.

Вторая система элементов внешнего ориентирования (рис. 20) включает: XS,, YS,, ZS — координаты точки фотографирования; α — продольный угол наклона снимка, т. е. угол между осью SZ и проекцией главного луча на плоскость SXZ; ω— поперечный угол наклона снимка, составленный главным лучом с плоскостью SXZ; — угол поворота снимка, т. е. угол на снимке между осью оу и следом плоскости, проходящей через главный луч и ось SY.
НЕТ страницы

Непрямолинейность маршрутов, характеризующаяся отношением стрелки прогиба к длине маршрута, не должна превышать 2 % при съемке в масштабах мельче 1 : 5000 и с высот 750 м и выше, а также 3 % при съемке в масштабе 1 :5000 и крупнее и с высот ниже 750 м.
Продольное перекрытие Рх аэрофотоснимков должно быть в среднем 60% (минимальное перекрытие 56%), что обеспечивает наличие тройного продольного перекрытия не менее 12 % (рис. 21, а). Перекрытие трех последовательных аэрофотоснимков является обязательным, так как оно определяет величину перекрытия между соседними стереопарами. В пределах этого перекрытия набирают связующие точки, обеспечивающие передачу координат с одной стереопары на другую.
В зависимости от целей аэрофотосъемки и используемых технических средств продольное перекрытие может устанавливаться в 80 и 90% с колебанием в пределах 3—5%. В этих случаях, если взять аэроснимки через один (Рж = 80%) или три (Рж= = 90%), то получим соответственно два или четыре маршрута с Рж = 6О%, что позволяет провести независимые измерения по каждому из маршрутов.
Поперечное перекрытие Ру аэрофотоснимков (рис. 21, б) из смежных маршрутов должно быть в среднем 30—40 % при минимальном значении 20 % и максимальном, не превышающем среднего на 10—20 %.
В поперечном перекрытии намечают точки полевой привязки аэрофотоснимков, связующие точки для передачи координат с одного маршрута на другой, точки фотограмметрического сгущения. Для повышения точности построения сетей блочной фототриангуляции выполняют аэрофотосъемку с Ру = 60 %.
Углы наклона аэрофотоснимков при съемке без стабилизации не должны превышать 3°, а со стабилизацией—1°. Число аэрофотоснимков с максимальным углом наклона не должно превышать 10 % от общего количества снимков.
Аэрофотосъемка должна производиться при отсутствии облачности. Высота Солнца над горизонтом должна быть не менее 20° при фотографировании на черно-белую фотопленку и 25° — на цветную или спектрозональную. В приполярных областях, покрытых снежным покровом, аэрофотосъемку лучше производить при низком расположении Солнца, что создает большое количество теней и тем самым улучшает условия для фотограмметрических измерений.
Аэронегативы, контактные отпечатки с них на фотобумаге и диапозитивы на стеклянных пластинках должны иметь резкое и хорошо проработанное изображение по всему полю.
Различают элементы внутреннего и внешнего ориентирования снимка.
Элементы внутреннего ориентирования определяют положение центра проекции S относительно снимка. Ими являются координаты главной точки (х0) у0) в системе координат снимка и фокусное расстояние / объектива АФА (рис. 7.5). Эти элементы почти всегда известны с высокой точностью и записаны в паспорте
АФА. Например, /= 100,020 мм; XQ = -0,012 мм; у0 = +0,023 мм.
Элементы внутреннего ориентирования формируют связку проектирующих лучей. Ее положение в пространстве определяют элементы внешнего ориентирования снимка. Их шесть. Это три линейных элемента — геодезические координаты центра проекции
S\XS\YS\ZS 1 и три угловых элемента (рис. 7.6):
а — продольный угол наклона снимка (угол между осью Z и проекцией главного луча на плоскость XZ);
со — поперечный угол наклона снимка (угол между главным лучом и проекцией главного луча на плоскость XZ);
к — угол поворота снимка (угол на снимке между осью у и следом сечения плоскости снимка с плоскостью, построенной на главном луче и оси У).
Следует заметить, что для всех снимков, полученных данным АФА, элементы внутреннего ориентирования можно считать постоянными известными величинами. Однако элементы внешнего ориентирования у каждого снимка свои и, как правило, неизвестны
АНАЛИТИЧЕСКОЕ ТРАНСФОРМИРОВАНИЕ СНИМКОВ
Конечная цель фотограмметрической обработки снимков — преобразование их в заданную картографическую проекцию местности. В Российской Федерации, как известно, такой проекцией является проекция Гаусса—Крюгера. Преобразование снимков в проекцию Гаусса—Крюгера требует выполнения очень громоздких вычислений. При крупномасштабном картографировании проекция Гаусса—Крюгера часто заменяется близкой к ней по геометрическим свойствам ортогональной проекцией.
В фотограмметрии под трансформированием понимают преобразование аэро- или космических снимков, полученных в большинстве случаев в центральной проекции, в ортогональную или какую-либо иную картографическую проекцию.
Суть аналитического трансформирования заключается в преобразовании координат точек снимка в координаты соответствующих точек местности с использованием строгих математических зависимостей.
Для горизонтального снимка, у которого угловые элементы внешнего ориентирования равны нулю (а = со = к = 0), а\ = Ь2=: = с3 = 1. Остальные направляющие косинусы равны нулю.
Если девять элементов ориентирования снимка (х$, yo,f, Xsг, Yj, Zj, а, со, к) известны, то можно вычислить геодезические координаты (Xsг, Yj) ТОЧКИ местности, измерив плоские прямоугольные координаты (х, у) ее изображения на снимке. Задачу по определению геодезических координат точки местности по измеренным координатам ее изображения на снимке называют прямой фотограмметрической засечкой.
В правых частях уравнений (7.2) помимо элементов ориентиро-
XQtyQ,f,Xs,Ys,Zs) и неявном
с2; с3) виде, а также измеренных координат (х, у) точки снимка содержится высотная координата z\ точки местности. Присвоив ей некоторое значение Z?, можно определить плановые координаты Х\, У^ точки местности, но невозможно вычислить все три геодезические координаты ХТА, Y\, ZA точки местности, используя одиночный снимок.
Для решения прямой фотограмметрической засечки существует несколько способов задания высотной координаты точки местности:
определением по имеющимся планам с горизонталями при отождествлении на них интересующей точки местности;
присвоением всем точкам одинаковой высоты, равной средней высоте снимаемой местности;
с использованием цифровой модели рельефа.
Точность определения плановых геодезических координат ХТА, YTA точки местности зависит от точности задания ее высотной координаты ZTA.
ОПРЕДЕЛЕНИЕ ЭЛЕМЕНТОВ ОРИЕНТИРОВАНИЯ СНИМКА
Решение прямой фотограмметрической засечки возможно при условии, что элементы ориентирования снимка известны.
Элементы внутреннего ориентирования, как правило, известны. Они определяются при калибровке АФА с точностью 0,001 мм и записываются в его паспорт.
Элементы внешнего ориентирования снимка можно определить различными способами. Их делят на две группы.
В первую группу входят способы определения элементов внешнего ориентирования снимков в полете с помощью специальных приборов. Например, координаты центров проекций находят по показаниям GPS-приемников, установленных на борту летательного аппарата. Угловые элементы внешнего ориентирования (а, со) определяют с помощью инерциальных систем навигации.
Во вторую группу входят способы для определения элементов внешнего ориентирования снимков по опорным точкам.
Опорными точками называют точки с известными геодезическими координатами. Определение элементов внешнего ориентирования снимков с использованием опорных точек называют обратной фотограмметрической засечкой или задачей по ориентированию снимка, которую решают аналитически с использованием уже известных из раздела 7.4 уравнений связи координат точек снимка и местности:….
В правых частях уравнений (7.2) содержатся все шесть искомых элементов внешнего ориентирования снимка. Для одной опорной точки с геодезическими координатами (ХТ, F, Z1") и измеренными координатами (х, у) ее изображения на снимке можно составить два независимых уравнения вида (7.2) с шестью неизвестными величинами — XTS, Y§, ZJ, а, со, к. Чтобы однозначно определить все шесть элементов внешнего ориентирования, необходимо объединить в систему не менее шести независимых уравнений, содержащих искомые элементы. Для этого требуется не менее трех планово-высотных опорных точек.
Для решения обратной фотограмметрической засечки с контролем используют четыре опорные точки и более, расположенные по углам рабочей площади снимка. Увеличение числа опорных точек позволяет также отбраковывать грубые измерения.
Для решения ряда фотограмметрических задач необходимо знать элементы ориентирования снимка.
Его элементы внешнего ориентирования могут быть получены либо с помощью специальных приборов в процессе аэрофотосъёмки либо в камеральных условиях по геодезическим и фотокоординатам опорных точек. Второй вариант назвали обратной пространственной фотограмметрической засечкой. Математической основой ее решения являются прямые или обратные уравнения коллинеарности.
Рассмотрим один из возможных способов математического решения засечки, основанный на применении уравнений (33).

Пусть на снимке изобразились точки местности, геодезические координаты которых известны (такие точки называют опознаками), и координаты x, y этих точек определены по данным измерений снимка. Примем, что элементы внутреннего ориентирования снимка даны. Тогда неизвестными величинами в формулах (33) окажутся координаты XS,, YS,, ZS центра проекции снимка и три угла . Указанные уравнения нелинейны по отношению к неизвестным, поэтому последние определяются способом приближений. То есть, вначале из каких-либо соображений принимают приближенные значения неизвестных, а затем определяют поправки к ним, используя технику уравнивания параметрическим способом. Таким образом, задачу решают следующим образом:
1. Определяют приближенные значения элементов внешнего ориентирования снимка. Например, угловые величины принимают равными нулю, а координаты центра проекции определяют по данным бортовых измерений или каким-либо другим способом.
2. Выполняют измерение с целью определения координат x и y опознаков на снимках.
3. Приближенные значения элементов внешнего ориентирования, а также элементы внутреннего ориентирования и заданные координаты опознаков подставляют в уравнения (33) и вычисляют координаты x¢ и y ¢ изображений опознаков на снимке. В силу погрешностей измерений, неточности приближенных величин, принятых в качестве неизвестных, и других причин вычисленные координаты не будут равны измеренным.
4. Составляют уравнения поправок, принимая разности l между измеренными и вычисленными координатами точек на снимке в качестве их свободных членов. Указанные уравнения будут иметь вид:
  | (56) |
где - поправки в приближённые значения элементов внешнего ориентирования снимка; lx=x - x¢ ; ly=y - y ¢ ; , – поправки в измеренные координаты x, y. Численные значения коэффициентов a, b,…, g' уравнений (56) вычисляются как частные производные функций x, y (уравнения 33) по соответствующим переменным. Например:

и т.д.
Система уравнений (56) содержит шесть неизвестных. Один опознак позволяет составить два уравнения, поэтому для решения задачи их должно быть не менее трех.
5. При избыточном количестве опознаков система линейных уравнений решается при условии

где Р – матрица весов измеренных координат точек снимка.
То есть составляют и решают нормальные уравнения. Для системы (56) они имеют вид:
 | (57) |

где В – матрица коэффициентов a, b,…,g' для опорных точек снимка; δ – вектор поправок ; l – вектор свободных членов уравнений (56).
Решая уравнения (57), определяют вектор поправок
 | (58) |
6. Вводят поправки δ к приближённым значениям элементов внешнего ориентирования, получают уточнённые значения неизвестных. Поскольку исходная система (35) нелинейная, а приближённые значения могут существенно отличаться от искомых величин, вычисления повторяют, начиная с пункта 3, и продолжают их до тех пор, пока разность векторов δ двух последних приближений не станет меньше установленного допуска. Такой путь решения называют методом итераций.
7. Выполняют оценку точности решения задачи. Для этого в последнем приближении вычисляют весовые коэффициенты Q и поправки V. Средние квадратические ошибки элементов вычисляют по формуле:
 , | (59) |
где i = 1, 2, 3,…,6 – номер поправки δ в уравнениях (56).
Ошибка единицы веса находят из соотношения
 , | (60) |
где п – число опорных точек.

Иногда, например, при калибровке камер, возникает задача определения и элементов внутреннего ориентирования снимка. В этом случае необходимо дополнить матрицу δ поправками , а матрицу В – коэффициентами h, m, n, h', m', n' при определяемых поправках. Поскольку количество неизвестных увеличивается до 9, число опознаков необходимых для решения задачи, должно быть не менее 5, а ошибка единицы веса должна определяться по формуле:
  . | (61) |
Следует иметь в виду, что при аэрофотосъёмке равнинной местности включение дополнительных неизвестных в систему уравнений поправок приводит к ухудшению обусловленности матрицы системы нормальных уравнений. Это приводит к снижению точности определения искомых величин.
Читайте также: