
Многопозиционные системы наблюдения реферат
Обновлено: 02.07.2024
Когда речь заходит об авиации, мы все живо представляем небо, самолет, аэропорты, путешествия. И редко кто задумывается о сложной системе, созданной для регулирования воздушного движения. Концепция Международной организации гражданской авиации CNS/ATM (Communication, Navigation, Surveillance/Air Traffic Management) предсказывает полную цифровизацию воздушного движения уже в скором будущем.
Сегодня расскажем об одном из самых современных средств наблюдения за воздушным движением — многопозиционных системах наблюдения (МПСН в России, MLAT, WAM в мире), в основе которых лежит принцип мультилатерации.
Технология мультилатерации появилась около 20 лет назад примерно тогда же, когда и автоматическое зависимое наблюдение (ADS-B), что по меркам консервативной отрасли совсем немного. И за эти 20 лет МПСН проделала большой путь от новой технологии до одного из основных средств в сегодняшней и будущей системах аэронавигации.
МПСН — это вторичный радиолокатор, в котором координаты целей измеряются с помощью разностно-дальномерного метода через сеть территориально-распределенных станций (сенсоров спутникозависимого наблюдения ADS-B, АЗН-В).
Как это работает?
Как и в любом вторичном радиолокаторе, наземный запросчик излучает запрос, ответчик на борту воздушного судна принимает запрос и формирует ответ, который принимается системой. Этот ответ используется для измерения положения воздушного судна, а также в нем передаётся дополнительная информация: в первую очередь, высота и идентификация. Но если традиционный локатор измеряет дальность и направление на воздушное судно, для чего используется массивная вращающаяся антенна с узким лучом, то станции МПСН принимают сигналы от целей со всех направлений, а координаты воздушного судна вычисляются по задержке времени прихода сигнала на разные станции.
Таким образом, МПСН являются средством вторичной радиолокации. Но перед традиционными радиолокаторами у МПСН есть ряд преимуществ. В первую очередь, это более высокий темп обновления информации (1 секунда) и более высокая точность. Это возможность создавать зону наблюдения там, где это нужно — на малых высотах, в горной местности и так далее. Это возможность размещать аппаратуру, которая компактная и потребляет энергии не больше электрической лампочки, на существующей инфраструктуре, без капитального строительства.
В России первая интегрированная многопозиционная система наблюдения, выполняющая одновременно функции аэродромного и широкозонного средства наблюдения, появилась в 2016 году. Система поддерживает все режимы наблюдения, в частности, режим АЗН-В 1090 ES, который рекомендован ИКАО в качестве единого стандарта для всего мирового воздушного пространства, а также заявлена как защищенная от кибератак.
Внедрить ее обещают уже в ближайшее время. А первый аэропорт, который оснастят такой системой — это Пулково, Санкт-Петербург.
Многопозиционные системы наблюдения (МПСН), основанные на многопозиционных технологиях АЗН-В, активно используются в качестве высокоточного источника информации о воздушной обстановке в аэропортовых, аэродромных и трассовых зонах УВД.
Наземная станция аэродромной многопозиционной системы наблюдения(АМПСН)
предназначена для определения местоположения и управления движением
воздушных судов, спецавтотранспортом, техническими средствами и другими
объектами, оборудованных ответчиками, находящихся на посадочной прямой и
рабочей площади аэродрома (площади маневрирования и перроне, на взлетно-
посадочной полосе, рулежных дорожках и местах стоянок воздушных судов). Московский аэропорт Домодедово первым в России устанавливает аэродромную многопозиционную систему наблюдения. Установка АМПСН и ее интеграция в уже работающую в Домодедово систему A-SMGCS (Усовершенствованная система управления наземным движением и контроля за ним) является наилучшим решением обеспечения контроля за наземным движением на аэродроме. Объединенные функции двух систем обеспечат наиболее полное и точное отображение на мониторах диспетчеров вышки УВД местоположения и передвижения самолетов и транспортных средств на взлетно-посадочных полосах, рулежных дорожках и перронах аэропорта. В основе новой системы лежит развертывание сети наземных станций системы АМПСН, рассредоточенных по всему аэродрому, стойки центральной обработки информации и 150 маяков (передающих устройств), установленных на спецтранспорт.
Для работы на поверхности а/д и на подлётах к нему(АМПСН)
Наземная станция широкозонной многопозиционной системы наблюдения предназначена для определения местоположения и управления движением воздушных судов оборудованных бортовыми ответчиками работающими в международном диапазоне (в режимах А/С и S) в верхнем и нижнем воздушном пространстве.
Концерн ПВО "Алмаз-Антей" успешно завершил в аэропорту Пулково (Санкт-Петербург) государственные испытания широкозонной многопозиционной системы наблюдения (МПСН) "Мера", которая была развернута в 2012 г. для организации наблюдения за воздушным пространством в районе Санкт-Петербурга. Но система может быть установлена как в маленьких, так и в крупных аэропортах, а также в местах со сложным рельефом местности.
Основные отличия активной МПСН от ВРЛ режима S
Оборудование: распределительный характер, отсутствие вращающейся антенны
Стоимость оборудования для МПСН ниже
ТТХ: меньше период обновления(до 1 сек.), большая точность при больших дальностях
Не является полностью независимой: синхронизация МПСН через ГНСС
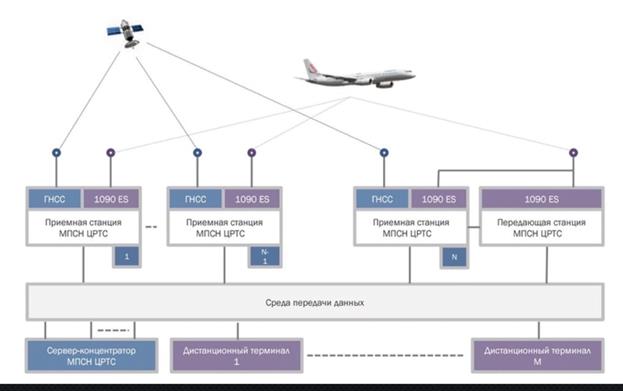
Сенсор-приёмная станция ЭМБЕР, принимает и декодирует ответы RBS и АЗН-В
Для WAM- способность спутниковой синхронизации времени
Запросчик /синхронизатор( частоты работ 1030-1090мГц, 2 комплекта резервирования
Концентратор – обмен информацией с сенсорами и запросчиками по внутрисистемной линии связи, формирование треков, передача данных потребителю, управление запросами, контроль управления системой.
Каналы связи(беспроводная, медная, оптическая).
Тут вы можете оставить комментарий к выбранному абзацу или сообщить об ошибке.
МПСН — (многопозиционная система наблюдения) это вторичный радиолокатор, в котором координаты целей измеряются с помощью разностно-дальномерного метода через сеть территориально-распределенных станций (сенсоров спутникозависимого наблюдения АЗН-В)
Требования
1)Частота :
· запроса – (1030±0,01) мГц,
· ответа - в режимах RBS - (1090±3) МГц;
- в режиме АЗН-В 1090 ES ;
- в режиме S - (1090±1) МГц.
2) Количество антенн в антенной системе –как минимум 3
3)Погрешности горизонтального местоположения ВС не должны превышать:
· 350 м (среднеквадратическая ошибка) для трассовой зоны;
· 150 м (среднеквадратическая ошибка) для аэродромной зоны
4)Количество одновременно сопровождаемых целей – не менее 250
5) Интервал обновления МПСН не должен превышать:
· 8 с - для наблюдения в трассовой зоне.
· 4 с - для наблюдения в аэродромной зоне;
6)МПСН должна обеспечивать временные отметки местоположений ВС, синхронизированные с UTC.
Виды МПСН:
1) МПСН-А(аэродромная) предназначена для определения местоположения и управления движением воздушных судов, спецавтотранспорта, технических средств и других объектов, оборудованных ответчиками, находящихся на посадочной прямой и рабочей площади аэродрома (площади маневрирования и перроне, ВПП, рулежных дорожках и местах стоянок воздушных судов).
2) МПСН-Ш(широкозонная) предназначена для определения местоположения и управления движением воздушных судов, оборудованных бортовыми ответчиками, работающими в международном диапазоне (в режимах A/C и S), в верхнем и нижнем воздушном пространстве.
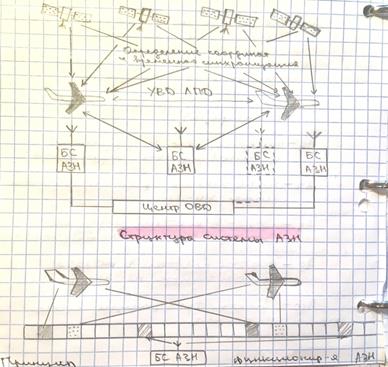
Структурная схема:
Принцип работы. Мультилатерация. Принцип мультилатерации заключается в том, что сигнал бортового ответчика принимают 3 и более приемников, расположенных в заданных местах. Поступающие данные обрабатываются, и центральный компьютер на основе полученной информации вычисляет местоположение воздушного судна в трехмерном пространстве. Определенные таким образом объекты отображаются на экране диспетчера, помеченные идентификатором самолета, высотой и другими данными.

Сам метод измерения также называют английской аббревиатурой TDOA, что означает time difference of arrival — разность времени прихода, или гиперболическим позиционированием, поскольку геометрически место точек, соответствующих определенной разности времени прихода для любых двух станций — это гипербола, а искомые координаты цели — это их пересечения.(как представлено на слайде). Ответы бортового приемоответчика получают либо ВОРЛ, либо станция запроса, которая является частью системы MLAT.
*Для справки- радиолокационная информация в режиме S может содержать 24-битовый адрес воздушного судна и данные о барометрической высоте, в то время как ответчики режимов S и 1090ES обеспечивают предоставление таких дополнительных данных, как информация о векторе состояния и местоположении в координатах Всемирной геодезической системы.
Приводятся принципы построения и оцениваются возможности перспективных многопозиционных радиолокационных систем ПВО, которые позволят вооруженным силам США и их союзников решать качественно новые задачи по скрытному наблюдению и контролю воздушного пространства.
Постоянный рост требований к объему и качеству радиолокационной информации о воздушной и помеховой обстановке, обеспечению высокой защищенности информационных средств от воздействия средств радиоэлектронной борьбы противника вынуждает зарубежных военных специалистов не только искать новые технические решения в создании различных компонентов радиолокационных станций (РЛС), которые являются основными информационными датчиками в системах ПВО, управления воздушным движением и др., но и развивать новые нетрадиционные направления в данной области разработки и создания военной техники [1].
Для обеспечения повышенной скрытности работы подобных систем в боевых условиях рассматриваются различные принципы их построения: наземного, воздушного, космического и смешанных вариантов базирования, использующих зондирующее излучение штатных РЛС, постановщиков активных помех противника, а также радиотехнических систем (рис. 1), нетрадиционных для радиолокации (телевизионных и радиовещательных передающих станций, различных систем и средств связи и т.д.). Наиболее интенсивно работы в данном направлении ведутся в США.
Возможность иметь систему радиолокационного поля, совпадающего с полем покрытия, формируемым зонами подсвета телевизионных, радиовещательных передающих станций (РТПС), базовых станций сотовой телефонной связи и т.п., обусловлена тем, что высота их антенных башен может достигать 50. 250 м, а формируемая ими всенаправленная зона подсвета прижата к поверхности земли. Простейший пересчет по формуле дальности прямой видимости показывает, что летательные аппараты, летящие на предельно малых высотах, попадают в поле подсвета таких передатчиков, начиная с расстояния 50 - 80 км.

Уравнение радиолокации для определения максимальной дальности действия бистатической РЛС имеет вид

где rl,r2 - расстояния от передатчика до цели и от цели до приемника;
Pt - мощность передатчика, Вт;
Gt, GT - коэффициенты усиления передающей и приемной антенн;
Pmin - предельная чувствительность приемного устройства;
k - постоянная Больцмана;
v1, v2 - коэффициенты потерь при распространении радиоволн на пути от передатчика к цели и от цели к приемнику.
Площадь зоны обнаружения МПРС, состоящей из одного передающего и нескольких приемных пунктов (либо наоборот), может значительно превосходить площадь зоны обнаружения эквивалентной совмещенной РЛС.

где А - площадь поперечного сечения объекта, перпендикулярная направлению распространения радиоволн, м ;
λ - длина волны, м.


Концепция МПРС разрабатывается в США с начала 1950-х годов в интересах их использования для решения различных задач, прежде всего контроля воздушно-космического пространства. Проводимые работы носили в основном теоретический, а в отдельных случаях экспериментальный характер. Интерес к многопозиционным радиолокационным системам вновь возник в конце 1990-х годов с появлением высокопроизводительных компьютеров и средств обработки сложных сигналов (радиолокационных, помеховых, сигналов радиотелевизионных передающих станций, радиосигналов станций мобильной связи и пр.), способных обеспечить обработку больших объемов радиолокационной информации для достижения приемлемых точностных характеристик подобных систем [2, 3]. Кроме того, появление космической радионавигационной системы GPS (Global Position System) позволяет производить точную топопривязку и жесткую временную синхронизацию элементов МПРС, что является необходимым условием при корреляционной обработке сигналов в подобных системах. Радиолокационные характеристики сигналов, излучаемых телевизионными (ТВ) и частотно-модулированными (ЧМ) радиовещательными передающими станциями с радиотелефонными станциями сотовой GSM связи приведены в таблице 1.


На рис. 4 - 5 приведены функции неопределенности телевизионных сигналов изображения и звукового сопровождения, УКВ ЧМ радиосигналов и сигналов цифрового широкополосного аудиовещания.
Как следует из анализа приведенных зависимостей, функция неопределенности ТВ сигнала изображения носит многопиковый характер, обусловленный его кадровой и строчной периодичностью. Непрерывный характер ТВ сигнала позволяет осуществлять частотную селекцию эхо-сигналов с высокой точностью, однако наличие в нем периодичности кадров приводит к появлению мешающих составляющих в его функции рассогласования, следующих через 50 Гц. Изменение средней яркости передаваемого ТВ изображения приводит к изменению средней мощности излучения и изменению уровня главного и боковых пиков его времячастотной функции рассогласования. Важным достоинством ТВ сигнала звукового сопровождения и частотно-модулированных сигналов УКВ радиовещания является однопиковый характер их тел неопределенности, что облегчает разрешение эхо-сигналов как по времени запаздывания, так и по частоте Доплера. Однако их нестационарность по ширине спектра оказывает сильное влияние на форму и ширину центрального пика функций неопределенности.
Подобные сигналы в традиционном понимании не предназначены для решения задач радиолокации, так как не обеспечивают требуемую разрешающую способность и точность определения координат целей. Однако совместная обработка в реальном масштабе времени сигналов, излучаемых различными разнотипными средствами, отраженных от ВЦ и одновременно принимаемых в нескольких пунктах приема, позволяет обеспечить требуемые точностные характеристики системы в целом. Для этого предусматривается использование новых адаптивных алгоритмов цифровой обработки радиолокационной информации и применение высокопроизводительных вычислительных средств нового поколения.
Особенностью МПРС с внешними передатчиками подсвета целей является наличие мощных прямых (проникающих) сигналов передатчиков, уровень которых может на 40 - 90 дБ превышать уровень сигналов, отраженных от целей. Для снижения мешающего влияния проникающих сигналов передатчиков и переотражений от подстилающей поверхности и местных предметов с целью расширения зоны обнаружения необходимо применять специальные меры: пространственную режекцию мешающих сигналов, методы автокомпенсации с частотно-селективной обратной связью на высокой и промежуточной частоте, подавление на видеочастоте и др.


Несмотря на то, что работы в данном направлении проводились на протяжении достаточно продолжительного периода, только в последнее время после появления относительно недорогих сверхскоростных цифровых процессоров, позволяющих обрабатывать большие объемы информации, впервые появилась реальная возможность создания экспериментальных образцов, отвечающих современным тактико-техническим требованиям.
Первый экспериментальный образец мобильного приемного модуля системы, в состав которого входят четыре контейнера с однотипными блоками вычислительных средств (размерами 0,5X0,5X0,5 м каждый) и антенная система (размерами 9X2,5 м), был создан в конце 1998 года. В случае их серийного производства стоимость одного приемного модуля системы будет составлять в зависимости от состава используемых средств от 3 до 5 млн. долл.
антенная система с ФАР (линейной или плоской) целевого канала, обеспечивающая прием сигналов, отраженных от целей;


приемное устройство с большим динамическим диапазоном и системами подавления мешающих сигналов передатчиков подсвета целей;
аналогово-цифровой преобразователь радиолокационных сигналов;
устройства отображения воздушной обстановки;

средства регистрации, записи и хранения информации;
средства автономного энергоснабжения.
В состав приемной ФАР входят несколько подрешеток, разработанных на основе существующих типов коммерческих антенных систем различного диапазона и назначения. В качестве экспериментальных образцов в нее дополнительно включены обычные приемные телевизионные антенные устройства. Одно приемное полотно ФАР способно обеспечить зону обзора в азимутальном секторе до 105 град, и в угломес-тном секторе до 50 град., а наиболее эффективный уровень приема отраженных от целей сигналов обеспечивается в азимутальном секторе до 60 град. Для обеспечения перекрытия круговой зоны обзора по азимуту возможно использование несколько полотен ФАР.
Такие системы будут иметь высокий уровень живучести, так как при их функционировании отсутствуют какие-либо признаки использования базовых станций телефонной мобильной связи в качестве передатчиков РЛС. Если же противник каким-либо образом сможет установить этот факт, он будет вынужден уничтожить все передатчики телефонной сети, что представляется маловероятным, учитывая современный масштаб их развертывания. Выявление и уничтожение самих приемных устройств таких радиолокационных систем с помощью технических средств практически невозможно, так как во время своего функционирования они используют сигналы стандартной мобильной телефонной сети. Применение постановщиков помех, по мнению разработчиков, окажется также неэффективным в связи с тем, что в работе рассматриваемых вариантов МПРС возможен режим, в котором устройства РЭП сами окажутся дополнительными источниками подсветки воздушных целей.
1. Jane's Defense Equipment (Электронная библиотека вооружений стран мира), 2006 - 2007.
2. Peter В. Davenport. Using Multistatic Passive Radar for Real-Time Detection of UFO'S in the Near-Earth Environment. - Copyright 2004. - National UFO Reporting Center, Seattle, Washington .
3. H. D. Griffiths. Bistatic and Multistatic Radar. - University College London, Dept. Electronic and Electrical Engineering. Torrington Place, London WC1E 7JE, UK.
4. Jonathan Bamak, Dr. Gregory Baker, Ann Marie Cunningham, Lorraine Martin. Silent Sentry™ Passive Surveillance // Aviation Week&Space Technology. - June 7, 1999. - P.12.
Читайте также: