
Микроконтроллеры в автоматизации физического эксперимента реферат
Обновлено: 03.07.2024
Современный физический эксперимент представляет собой сложную управляемую систему, состоящую из множества взаимосвязанных подсистем, объединенных общей целью функционирования. Сложность и большие материальные затраты для проведениянаучных исследований ставят задачу повышения их эффективности, что обеспечивается автоматизацией, применением компьютеров и современных математических методов обработки экспериментальных данных. Однако главной составляющей эффективности научных исследований является сам исследователь, который должен хорошо разбираться
в устройствах и системах автоматизации, принципах организации и планированииэксперимента.
Предлагаемое учебное пособие написано в виде курса лекций, который авторы читают на физическом факультете Белорусского государственного университета и на факультете мониторинга окружающей среды Международного государственного экологического университета им. А. Д. Сахарова. Круг вопросов по автоматизации физического эксперимента чрезвычайно широк. В книге рассмотрен путьпрохождения экспериментальных данных от датчиков до обработки их на ЭВМ,
а также предоставлены сведения по элементной базе систем автоматизации. Задачи подробно останавливаться на проблемах планирования эксперимента, борьбы с помехами, методах обработки экспериментальных данных не ставилось.
Авторы пособия выражают благодарность коллегам кафедре ядерной физики Э. А. Авданиной, С. Е. Чалейи И. В. Деминой, а также сотрудникам Управления редакционно-издательской работы БГУ за помощь в подготовке рукописи к изданию.
СПИСОК СОКРАЩЕНИЙ, СИМВОЛИЧЕСКИХ ИМЕН И АББРЕВИАТУР
РУССКАЯ НОТАЦИЯ
АЛУ – арифметико-логическое устройство
БВВ – блок ввода/вывода
ВВ/ВЫВ – ввод/вывод
ВПД – внешняя память данных
ВПП – внешняя память программ
ЗУ – запоминающее устройствоЗУПВ – запоминающее устройство с произвольной выборкой
ИС – интегральная схема
КЛБ – конфигурируемый логический блок
КС – комбинационная схема
КМОП – комплементарный МОП
ЛБ – логический блок
ЛИЗМОП – МОП-транзистор с плавающим затвором с использованием
механизма лавинной инжекции
ЛЭ – логический элемент
МЗР – младший значащий разряд
МК –микроконтроллер
МОП – металл – оксид – полупроводник
МП – микропроцессор
МЦ – машинный цикл
ОЗУ – оперативное запоминающее устройство
ПЗУ – постоянное запоминающее устройство
ППЗУ – программируемое постоянное запоминающее
устройство
ПЛИС – программируемая логическая интегральная схема
ПЛМ – программируемая логическая матрица (PLA)
ПМЛ – программируемая матрица логики (PAL)
РОН– регистр общего назначения
РПД – резидентная память данных
РПЗУ – репрограммируемое ПЗУ
РПП – резидентная память программ
РСФ – регистр специальных функций
СДНФ – совершенная дизъюнктивная нормальная форма
СЗР – старший значащий разряд
СК – счетчик команд
СКНФ – совершенная конъюнктивная нормальная форма
Т/Сч – таймер/счетчик
ТТЛ – транзисторно-транзисторнаялогика
ТТЛШ – ТТЛ с диодами Шоттки
УАПП – универсальный асинхронный приемопередатчик
(последовательный порт)
ЦП – центральный процессор
ША – шина адреса
ШД – шина данных
ШУ – шина управления
ЭСЛ – эмиттерно-связанная логика
Представление информации в цифровых устройствах, кодирование символов и основы булевой алгебры. Классификация полупроводниковых запоминающих устройств. Базовая структура микропроцессорной системы, ее функциональное назначение и способы передачи данных.
| Рубрика | Коммуникации, связь, цифровые приборы и радиоэлектроника |
| Вид | учебное пособие |
| Язык | русский |
| Дата добавления | 19.12.2011 |
| Размер файла | 1,7 M |
Студенты, аспиранты, молодые ученые, использующие базу знаний в своей учебе и работе, будут вам очень благодарны.
HTML-версии работы пока нет.
Cкачать архив работы можно перейдя по ссылке, которая находятся ниже.
Подобные документы
Системы счисления в цифровых устройствах. Теоремы, логические константы и переменные операции булевой алгебры. Назначение, параметры и классификация полупроводниковых запоминающих устройств, их структурная схема. Процесс аналого-цифрового преобразования.
курсовая работа [1,8 M], добавлен 21.02.2012
Применение булевой алгебры при анализе и синтезе цифровых электронных устройств. Реализация логических функций в разных базисах. Параметры и характеристики цифровых интегральных микросхем. Структура локальной микропроцессорной системы управления.
книга [3,6 M], добавлен 20.03.2011
Классификация линий передачи по назначению. Отличия цифровых каналов от прямопроводных соединений. Основные методы передачи данных в ЦПС. Ethernet для связи УВК с рабочими станциями ДСП и ШНЦ. Передача данных в системах МПЦ через общедоступные сети.
реферат [65,1 K], добавлен 30.12.2010
Структурная схема цифровых систем передачи и оборудования ввода-вывода сигнала. Методы кодирования речи. Характеристика методов аналого-цифрового и цифро-аналогового преобразования. Способы передачи низкоскоростных цифровых сигналов по цифровым каналам.
презентация [692,5 K], добавлен 18.11.2013
реферат [51,3 K], добавлен 11.02.2009
Представление и классификация кодов, построение кода с заданной коррекцией. Характеристика корректирующих кодов (код Хемминга, код БЧХ). Разработка схемотехнической реализации кодера и декодера. Выбор способа представления информации в канале передачи.
курсовая работа [131,1 K], добавлен 02.01.2011
Система цифровой обработки информации среднего быстродействия. Назначение, состав, принцип работы отдельных блоков и устройств. Расчет потребляемой мощности микропроцессорной системы. Способы адресации данных. Процесс инициализации внешних устройств.
В статье рассматривается роль микроконтроллеров (МК) в системах промышленной автоматизации, в частности, речь пойдет о том, как на базе микроконтроллеров реализуется интерфейс реального мира для различного типа датчиков и исполнительных механизмов. Также мы обсудим необходимость интеграции в микроконтроллеры высокопроизводительных ядер, таких как ARM Cortex-M3, с прецизионной и специализированной периферией, которой снабжены микроконтроллеры серии ADuCM360 компании Analog Devices и семейства EFM32 компании Energy Micro (Silicon Labs). Также не останется без внимания относительно новый протокол обмена данными, который ориентирован на эту область приложений, с конкретной ссылкой на бюджетные микроконтроллеры семейства XC800/XC16x (Infineon) и MSP430F2274 (Texas Instruments), и на специализированные приемопередатчики, включая MAX14821 (Maxim).
Микроконтроллеры интегрируют в себе технические возможности для обработки смешанных сигналов и вычислительную мощность, при этом уровень производительности МК и их функционал постоянно растет. Однако существуют другие разработки, которые позволяют продлить жизненный цикл бюджетных и низкопроизводительных микроконтроллеров.
Прецизионная работа
По соображениям коммерческой необходимости предполагается, что процесс преобразования данных, как ключевая функция микроконтроллеров, должен быть экономически эффективно внедрен в микроконтроллер, что приводит к повышению уровня интеграции функционала для обработки смешанных сигналов. Кроме того, рост уровня интеграции способствует увеличению нагрузки на ядро.
Низкая стоимость и гибкость функционала микроконтроллеров означает широкое применение микроконтроллеров в различных приложениях, но производители в настоящее время стремятся к объединению множества функций в одном микроконтроллере по соображениям экономической эффективности, сложности или безопасности. Где когда-то, возможно, использовались десятки микроконтроллеров, сейчас потребуется только один.
Поэтому неудивительно, что то, что начиналось с 4-разрядных устройств, теперь превратилось в очень сложные и мощные 32-разрядные процессорные ядра, а ядро ARM Cortex-M стало выбором многих производителей.
Совместить высокопроизводительное процессорное ядро с прецизионным и стабильным аналоговым функционалом – непростая задача. Технология КМОП идеальна для высокоскоростных цифровых схем, но с реализацией чувствительной аналоговой периферии могут быть проблемы. Одной из компаний, имеющей огромнейший опыт в этой области, является Analog Devices. Разработанное компанией семейство полностью интегрированных систем сбора данных ADuCM предназначено для непосредственного взаимодействия с прецизионными аналоговыми датчиками. При таком подходе не только уменьшается количество внешних компонентов, но и гарантируется точность преобразования и измерений.
Преобразователь, интегрированный, например, в систему ADuCM360 с ядром ARM Cortex-M3, представляет собой 24-разрядный сигма-дельта АЦП, являющийся частью аналоговой подсистемы. В указанную систему сбора данных интегрированы программируемые источники тока возбуждения и генератор напряжения смещения, но более важной частью являются встроенные фильтры (один из которых используется для прецизионных измерений, другой – для быстрых измерений), которые применяются для обнаружения больших изменений в исходном сигнале.
Производители микроконтроллеров учитывают важную роль датчиков в системах автоматизации и начинают разрабатывать оптимизированные входные аналоговые схемы, которые обеспечивают специализированный интерфейс для индуктивных, емкостных и резистивных датчиков.
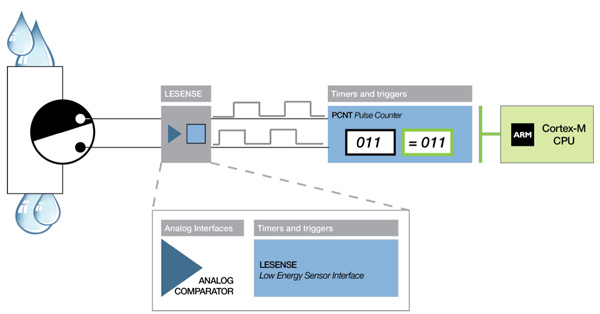 | |
| Рисунок 1. | Технология LESENSE, интегрированная в микроконтроллеры EFM32, подразумевает автономную работу интерфейса датчиков в системах промышленного контроля и автоматизации. |
 | |
| Рисунок 2. | Стартовый набор EFM32 Tiny Gecko Starter Kit позволит полностью оценить возможности микроконтроллеров семейства Tiny Gecko. |
Протокол IO-Link
В первую очередь заметим, что собственный идентификатор (и производителя) и различные настройки встроены в датчик в формате XML и доступны по запросу. Это позволяет системе мгновенно классифицировать датчик и понять его назначение. Но, что более важно, IO-Link позволяет датчикам (и исполнительным механизмам) предоставлять контроллеру данные непрерывно в реальном времени. Фактически, протокол подразумевает обмен тремя типами данных: данные о процессе, сервисные данные и данные о событиях. Данные о процессе передаются циклически, а сервисные данные передаются ациклично и по запросу ведущего контроллера. Сервисные данные могут использоваться при записи/чтении параметров устройства.
 | |
| Рисунок 3. | Интерфейс IO-Link предлагает для микроконтроллеров более простой способ обмена данными с интеллектуальными датчиками и исполнительными механизмами, а для разработчиков – возможность создавать интеллектуальные системы автоматизации. |
Некоторые производители микроконтроллеров присоединились к консорциуму IO-Link, который недавно стал Техническим Комитетом (TC6) в составе международного сообщества PI (PROFIBUS & PROFINET International). По сути, IO-Link устанавливает стандартизированный метод для контроллеров (включая микроконтроллеры и программируемые логические контроллеры) для идентификации, контроля и обмена данными с датчиками и исполнительными механизмами, которые используют этот протокол. Список производителей IO-Link-совместимых устройств постоянно растет, как и всесторонняя аппаратно-программная поддержка производителей микроконтроллеров.
Стек, разработанный Mesco, также был портирован на 16-разрядные микроконтроллеры Texas Instruments серии MSP430, в частности, для MSP430F2274.
Производители также уделяют свое внимание разработке дискретных приемопередатчиков интерфейса IO-Link. Например, компания Maxim выпускает микросхему MAX14821, которая реализует интерфейс физического уровня для микроконтроллера, поддержтвающего канальный уровень протокола (Рисунок 4). Два внутренних линейных регулятора вырабатывают общие для датчика и исполнительного механизма напряжения питания 3.3 В и 5 В, подключение к микроконтроллеру для конфигурирования и мониторинга осуществляется по последовательному интерфейсу SPI.
| Рисунок 4. | Микросхема приемопередатчика MAX14821 предоставляет физический уровень интерфейса IO-Link для микроконтроллера, реализующего канальный уровень интерфейса. |
Вполне вероятно, что благодаря простоте реализации и внедрения интерфейса IO-Link, все больше производителей будут интегрировать этот физический уровень с другой специализированной периферией, присутствующей в микроконтроллерах, с целью применения в промышленных системах автоматизации. Компания Renesas уже представила ассортимент специализированных контроллеров IO-Link Master/Slave на основе своих 16-разрядных микроконтроллеров семейства 78К.

ГОСТ
Применение микроконтроллеров в системах автоматизированной обработки информации и управления — это использование универсальных инструментов, какими являются микроконтроллеры, для реализации процессов управления различным электронным оборудованием.
Введение
Автоматизация различных технологических процессов выполняется при помощи микроконтроллеров, то есть модулей, встраиваемых в производственную архитектуру предприятия. Они превращаются в её составной компонент и формируют независимую систему управления информационной обработкой. Сегодня программируемые логические микроконтроллеры являются нормой в автоматизированных системах. Основным смыслом автоматизации на производстве является контроль изменения состояния определённых объектов и возможность управлять этими процессами. Уменьшение колебаний ведёт к росту производительности и эффективности.
Микроконтроллеры объединяют внутри себя технологические возможности переработки смешанных сигналов и вычислительные мощности, причём производительность микроконтроллеров и их функциональные возможности непрерывно возрастают.
Применение микроконтроллеров в системах автоматизированной обработки информации и управления
Очевидно, что микроконтроллеры останутся бесполезными, если не будет обеспечена их связь с внешним реальным окружением. Они разрабатывались как концентраторы для систем входа и выхода, решая задачи условных переходов и осуществляя управление процессами последовательного и параллельного типа. Их исполняемая функция должна определяться управлением, но при этом имеется возможность перепрограммирования, и это значит, что характеристики управления определяются логикой.
Но при этом, микроконтроллеры вначале проектировались для получения интерфейса связи с аналоговым оборудованием, и это означает, что при функционировании микроконтроллеров, они базируются на процессах аналого-цифровых преобразований. Обычно это выражение аналоговых параметров в цифровом формате, как правило, поступающих от каких-либо датчиков, на базе которых формируется управляющие процедуры. То есть главное использование микроконтроллеров предусматривается в системах автоматизированного или автоматического управления.
Готовые работы на аналогичную тему
Возможность осуществлять управление механическими системами повышенной сложности и размеров, применяя маленький и сравнительно дешёвый микроконтроллер, привело к тому, что микроконтроллеры считаются наиболее значимыми компонентами промышленных автоматизированных систем. И вполне естественно, что ведущие мировые корпорации начали выпуск специализированных семейств микроконтроллеров.
Коммерческая необходимость предполагает, что процесс информационного преобразования, в качестве базовой функции микроконтроллеров, обязан экономически эффективно внедряться в микроконтроллеры. Это ведёт к росту степени функциональной интеграции с целью переработки смешанного сигнала.
Небольшая стоимость и гибкие функциональные возможности микроконтроллеров предполагают их обширное использование в самых разных приложениях. Однако компании, выпускающие сегодня микроконтроллеры, стараются объединить весь функциональный набор в одном микроконтроллере, что повышает его экономическую эффективность. Ранее требовалось использовать в одном устройстве целый набор микроконтроллеров, состоящий из десятков устройств, а сегодня достаточно одного. Объединить процессорное ядро с высокой производительностью и прецизионный аналоговый функциональный набор, обладающий прецизионной стабильностью, является очень непростой задачей.
Одной из фирм, которые имеют огромный опыт в этой сфере, является Analog Devices. Спроектированное этой фирмой семейство целиком интегрированных систем по сбору информационных данных ADuCM, служит для прямого взаимодействия с набором прецизионных аналоговых датчиков. С таким подходом становится меньше число внешних элементов, а также обеспечивается требуемая точность выполнения преобразований и измерений.
Компании, производящие микроконтроллеры, понимают важнейшую роль, которую играют датчики в системах автоматизированной информационной обработки и управления, и поэтому разрабатывают оптимизированные входные аналоговые схемы, обеспечивающие специальный интерфейс для индуктивных, емкостных и резистивных датчиков.
Использование нового мощного интерфейса датчиков и исполнительных механизмов даёт возможность отдельным фирмам продлевать жизненный цикл своих микроконтроллеров на рынке разнообразных систем автоматизации. Данный протокол интерфейса трансляции информационных данных называется IO-Link и он был поддержан лидерами в сфере промышленной автоматизации, а также компаниями, выпускающими микроконтроллеры.
Трансляция информационных данных с использованием протокола IO-Link выполняется по трёх проводному кабелю на дистанцию до двадцати метров, что даёт возможность внедрения интеллектуальных датчиков и исполнительных механизмов в уже действующие системы.
Данный протокол предполагает, что все датчики или исполнительные механизмы считаются интеллектуальными. Говоря по-другому, все точки исполнены на основе микроконтроллеров, но логика протокола очень простая, что позволяет использовать для данных целей восьмиразрядные микроконтроллеры. Это обстоятельство используют сегодня очень многие компании. Идея интерфейса IO-Link изображена на рисунке ниже:

Рисунок 1. Интерфейс IO-Link. Автор24 — интернет-биржа студенческих работ
Международный консорциум производителей, применяющих IO-Link, полагает, что имеется возможность существенно понизить сложность систем, и, помимо этого, добавить различные полезные функции. К примеру, это может быть диагностика в реальном масштабе времени при помощи параметрического мониторинга.
Ряд производителей микроконтроллеров объединились с консорциумом IO-Link, который уде преобразовался в Технический Комитет (ТС6). Фактически IO-Link установил стандартизированную методику для контроллеров и микроконтроллеров в том числе, для информационного обмена с датчиками и другими механизмами, использующими данный протокол.
Структура и использование микроконтроллеров
электрический схема программный
Область применения микроконтроллеров - это различные контроллеры устройств автоматики, пластиковые карты, контроллеры периферийных устройств.
Развитие микроэлектроники и её широкое применений изделий в промышленном производстве, в устройствах и системах управления самыми разнообразными объектами и процессами является в настоящее время одним из основных направлений научно-технического прогресса.
Использование микроконтроллеров в изделиях не только приводит к повышению технико-экономических показателей (стоимости, надежности, потребляемой мощности, габаритных размеров), но и позволяет сократить время разработки изделий и делает их модифицируемыми, адаптивными. Использование микроконтроллеров в системах управления обеспечивает достижение высоких показателей эффективности при низкой стоимости.
Микроконтроллеры представляют собой эффективное средство автоматизации разнообразных объектов и процессов.
В настоящее время в рамках единой базовой архитектуры микроконтроллеры AVR подразделяются на несколько семейств:
Mega AVR для специальных применений;
Далее будет более подробно рассмотрено семейство Mega. Микроконтроллеры этого семейства имеют наиболее развитую периферию, наибольшие среди всех микроконтроллеров AVR объемы памяти программ и данных. Они предназначены для использования в мобильных телефонах, в контроллерах различного периферийного оборудования (такого как принтеры, сканеры, современные дисковые накопители, приводы CD-ROM/DVD-ROM и т. п.), в сложной офисной технике и т. д.
Микроконтроллеры семейства Mega поддерживают несколько режимов пониженного энергопотребления, имеют блок прерываний, сторожевой таймер и допускают программирование непосредственно в готовом устройстве.
1. Аппаратная часть
1.1Структура устройства
Рисунок1. Структурная схема устройства
) DL - Датчик нижнего уровня;
) DH - Датчики верхнего уровня;
) DT - Датчик температуры;
) K1, K2, K3 - электромагнитные краны;
) TEN - электрический нагревательный элемент;
) Arduino Duemilanove - платформа Arduino Duemilanove.
Рисунок 1.1 схема установки
1.2 Описание принципиальной электрической схемы
Рисунок 2. Arduino Duemilanove
Общие сведения
Рабочее напряжение5 В
Постоянный ток через вход / выход40 мА
Постоянный ток для вывода 3.3 В50 мА
Флеш-память 16 Кб (ATmega168) или 32 Кб (ATmega328) при этом 2 Кб используются для загрузчика
ОЗУ 1 Кб (ATmega168) или 2 Кб (ATmega328)512 байт (ATmega168) или 1 Кб (ATmega328)
Тактовая частота16 МГц
Схема и исходные данные
Рисунок 3. Принципиальная схема Arduino Duemilanove
Arduino Duemilanove может получать питание через подключение USB или от внешнего источника питания. Источник питания выбирается автоматически.
Внешнее питание (не USB) может подаваться через преобразователь напряжения AC/DC (блок питания) или аккумуляторной батареей. Преобразователь напряжения подключается посредством разъема 2.1 мм с центральным положительным полюсом. Провода от батареи подключаются к выводам Gnd и Vin разъема питания.
Платформа может работать при внешнем питании от 6 В до 20 В. При напряжении питания ниже 7 В, вывод 5V может выдавать менее 5 В, при этом платформа может работать нестабильно. При использовании напряжения выше 12 В регулятор напряжения может перегреться и повредить плату. Рекомендуемый диапазон от 7 В до 12 В.
V. Регулируемый источник напряжения, используемый для питания микроконтроллера и компонентов на плате. Питание может подаваться от вывода VIN через регулятор напряжения, или от разъема USB, или другого регулируемого источника напряжения 5 В.
V3. Напряжение на выводе 3.3 В генерируемое микросхемой FTDI на платформе. Максимальное потребление тока 50 мА.. Выводы заземления.
Микроконтроллер ATmega168 имеет 16 кБ флеш-памяти для хранения кода программы, а микроконтроллер ATmega328, в свою очередь, имеет 32 кБ (в обоих случаях 2 кБ используется для хранения загрузчика). ATmega168 имеет 1 кБ ОЗУ и 512 байт EEPROM (которая читается и записывается с помощью библиотеки EEPROM), а ATmega328 - 2 кБ ОЗУ и 1 Кб EEPROM.
Каждый из 14 цифровых выводов Duemilanove, используя функции pinMode(), digitalWrite(), и digitalRead(), может настраиваться как вход или выход. Выводы работают при напряжении 5 В. Каждый вывод имеет нагрузочный резистор (стандартно отключен) 20-50 кОм и может пропускать до 40 мА. Некоторые выводы имеют особые функции:
Последовательная шина: 0 (RX) и 1 (TX). Выводы используются для получения (RX) и передачи (TX) данных TTL. Данные выводы подключены к соответствующим выводам микросхемы последовательной шины FTDI USB-to-TTL.
Внешнее прерывание: 2 и 3. Данные выводы могут быть сконфигурированы на вызов прерывания либо на младшем значении, либо на переднем или заднем фронте, или при изменении значения. Подробная информация находится в описании функции attachInterrupt().
ШИМ: 3, 5, 6, 9, 10, и 11. Любой из выводов обеспечивает ШИМ с разрешением 8 бит при помощи функции analogWrite().
SPI: 10 (SS), 11 (MOSI), 12 (MISO), 13 (SCK). Посредством данных выводов осуществляется связь SPI, которая, хотя и поддерживается аппаратной частью, не включена в язык Arduino.: 13. Встроенный светодиод, подключенный к цифровому выводу 13. Если значение на выводе имеет высокий потенциал, то светодиод горит.
На платформе Duemilanove установлены 6 аналоговых входов, каждый разрешением 10 бит (т.е. может принимать 1024 различных значения). Стандартно выводы имеют диапазон измерения до 5 В относительно земли, тем не менее имеется возможность изменить верхний предел посредством вывода AREF и функции analogReference(). Некоторые выводы имеют дополнительные функции:C: 4 (SDA) и 5 (SCL). Посредством выводов осуществляется связь I2C (TWI), для создания которой используется библиотека Wire.
Дополнительная пара выводов платформы:. Опорное напряжение для аналоговых входов. Используется с функцией analogReference().. Низкий уровень сигнала на выводе перезагружает микроконтроллер. Обычно применяется для подключения кнопки с целью блокировки микроконтроллера.
Обратите внимание на соединение между выводами Arduino и портами ATmega168.
На платформе Arduino Duemilanove установлено несколько устройств для осуществления связи с компьютером, другими устройствами Arduino или микроконтроллерами. ATmega168 и ATmega328 поддерживают последовательный интерфейс UART TTL (5 В), осуществляемый выводами 0 (RX) и 1 (TX). Установленная на плате микросхема FTDI FT232RL направляет данный интерфейс через USB, а драйверы FTDI (включены в программу Arduino) предоставляют виртуальный COM порт программе на компьютере. Мониторинг последовательной шины (Serial Monitor) программы Arduino позволяет посылать и получать текстовые данные при подключении к платформе. Светодиоды RX и TX на платформе будут мигать при передаче данных через микросхему FTDI или USB подключение (но не при использовании последовательной передачи через выводы 0 и 1).
Библиотекой SoftwareSerial возможно создать последовательную передачу данных через любой из цифровых выводов Duemilanove.и ATmega328 поддерживают интерфейсы I2C (TWI) и SPI. В Arduino включена библиотека Wire для удобства использования шины I2C. Более подробная информация находится в документации. Для использования интерфейса SPI обратитесь к техническим данным микроконтроллеров ATmega168 и ATmega328.
Микроконтроллеры ATmega168 и ATmega328 поставляются с записанным загрузчиком, облегчающим запись новых программ без использования внешних программаторов. Связь осуществляется оригинальным протоколом STK500.
Имеется возможность не использовать загрузчик и запрограммировать микроконтроллер через выводы ICSP (внутрисхемное программирование). Подробная информация находится в данной инструкции.
Автоматическая (программная) перезагрузкаразработана таким образом, чтобы перед записью нового кода перезагрузка осуществлялась самой программой, а не нажатием кнопки на платформе. Одна из линий FT232RL, управляющих потоком данных (DTR), подключена к выводу перезагрузки микроконтроллеров ATmega168 или ATmega328 через резистор 100 нФ. Активация данной линии, т.е. подача сигнала низкого уровня, перезагружает микроконтроллер. Программа Arduino, используя данную функцию, загружает код одним нажатием кнопки Upload в самой среде программирования. Подача сигнала низкого уровня по линии DTR скоординирована с началом записи кода, что сокращает таймаут загрузчика.
Функция имеет еще одно применение. Перезагрузка Duemilanove происходит каждый раз при подключении к программе Arduino на компьютере с ОС Mac X или Linux (через USB). Следующие полсекунды после перезагрузки работает загрузчик. Во время программирования происходит задержка нескольких первых байтов кода во избежание получения платформой некорректных данных (всех, кроме кода новой программы). Если производится разовая отладка скетча, записанного в платформу, или ввод каких-либо других данных при первом запуске, необходимо убедиться, что программа на компьютере ожидает в течение секунды перед передачей данных.
Токовая защита разъема USB
В Arduino Duemilanove встроена перезагружаемая плавкая вставка (предохранитель), защищающая порт USB компьютера от токов короткого замыкания и сверхтоков. Хотя практически все компьютеры имеют подобную защиту, тем не менее, данный предохранитель обеспечивает дополнительный барьер. Предохранитель автоматически прерывает обмен данных при прохождении тока более 500 мА через USB порт.
Длинна и ширина печатной платы Duemilanove составляют 6.9 и 5.3 см соответственно. Разъем USB и силовой разъем выходят за границы данных размеров. Три отверстия в плате позволяют закрепить ее на поверхности. Расстояние между цифровыми выводами 7 и 8 равняется 0,4 см, хотя между другими выводами оно составляет 0,25 см.
1.3 Описание принципиальной электрической схемы
Схема электрическая принципиальная представлена на рисунке 1.2
1.4 Выбор и расчет элементов схемы
При разработке устройства были использованы следующие электронные компоненты:
термодатчик DS 18B20;
датчики PL - нижнего уровня и датчик PH - высокого уровня
электрический нагревательный элемент
Для включения электронагревателя или электродвигателя микроконтроллер должен выдать сигнал низкого уровня на соответствующую линию порта вывода.
После включения нагревателя устройство должно поддерживать температуру в диапазоне от Тмин до Тмакс. Текущее значение температуры отображается на 3-значном цифровом индикаторе.
В исходном состоянии резервуары пуст, все краны закрыты, нагреватель и двигатель выключены.
Датчик температуры (DT) использует термосопротивление, величина которого зависит от температуры. Датчик проградуирован так, что при температуре 10 С 0 он выдает 0,1 В, а при температуре 200 С 0 - 2,0В.
Даны значения Тмин=85, Тмакс=90. Следовательно Тмин =174 Тмакс =184
1.5 Конструкция устройства
Общая характеристика объекта управления. Агрегат содержит один резервуар (Р), который оснащен датчиками и имеет входные трубы и выпускную трубу. Дополнительно резервуары могут содержать электронагреватель (TEN), миксер, приводимый во вращение электродвигателем (ED). Задана последовательность операций, которая обеспечивает химико-технологический процесс приготовления продута.
Датчик нижнего уровня (DL) сигнализирует о том, что резервуар пуст, если сигнал DL=0. Датчики верхнего уровня (DH) сигнализируют о том, что резервуар заполнен, если сигнал DH=0. На каждой трубе имеется кран, приводимый в движение электромагнитом. Кран будет открыт, если на электромагнит подать сигнал управления низкого уровня (K n =0, n-номер крана). Если сработает датчик нижнего уровня, то соответствующий выпускной кран должен быть закрыт.
Датчик температуры (DT) использует термосопротивление, величина которого зависит от температуры. Датчик проградуирован так, что при температуре 10 С 0 он выдает 0,1 В, а при температуре 200 С 0 - 2,0В.
После включения нагревателя устройство должно поддерживать температуру в диапазоне от Тмин до Тмакс. В исходном состоянии резервуары пуст, все краны закрыты, нагреватель и двигатель выключены.
2. Программное обеспечение
.1 Алгоритм функционирования
Открыть кран К1 на 30 с.
Открыть кран К2 до заполнения резервуара. Р
Запустить электродвигатель на 5 мин. Одновременно включить нагреватель.
Выключить нагреватель. Слить жидкость из Р.
Открыть кран К3 до заполнения Р водой.
Включить двигатель и перемешивать в течение 3 мин.
Даны значения Тмин=85, Тмакс=90. Режим работы светодиодных цифровых индикаторов - динамический. 174-184
Алгоритм функционирования робота представлен на Рисунке 5.
Рисунок 5. Блок схема алгоритма
.2 Описание программы
Функция setup () главная функция.
pinMode (5, INPUT); //dh - на ввод. Датчик высокого уровня
pinMode (6, INPUT); //dl - на ввод. Датчик низкого уровня
pinMode (9, OUTPUT); //k2 на вывод, кран К2
pinMode (10, OUTPUT); //k3 на вывод, кран К3
pinMode (12, OUTPUT); //ten на вывод для нагревательного элемента
pinMode (13, OUTPUT); //dvig на вывод для управления двигателем
pinMode (3, OUTPUT); //tone на вывод спикера
Открыть кран К1 на 30 с.
Открыть кран К2 до заполнения резервуара. Р
Запустить электродвигатель на 5 мин. Одновременно включить нагреватель.
Выключить нагреватель. Слить жидкость из Р.
Открыть кран К3 до заполнения Р водой.
Включить двигатель и перемешивать в течение 3 мин.
Даны значения Тмин=85, Тмакс=90. Режим работы светодиодных цифровых индикаторов - динамический. 174-184
2.3 Технология подготовки и отладки ПО
Разработка программы для микроконтроллера производилась в среде Среда разработки Arduino
Рисунок 6. среда разработки Arduino 0021
Проверка программного кода на ошибки, компиляция.
Остановка мониторинга последовательной шины (Serial monitor) или затемнение других кнопок.
Создание нового скетча.
Открытие меню доступа ко всем скетчам в блокноте. Открывается нажатием в текущем окне.
Примечание: из-за наличия ошибки в Java данное меню не может прокручиваться; при необходимости открыть скетч из этого списка проследуйте в меню File | Sketchbook.
Upload to I/O Board
Компилирует программный код и загружает его в устройство Arduino. Описание загрузки приведено ниже.
Открытие мониторинга последовательной шины (Serial monitor).
Дополнительные команды сгруппированы в пять меню: File, Edit, Sketch, Tools, Help. Доступность меню определяется работой, выполняемой в данный момент.
Copy for Discourse
Копирует в буфер обмена подходящий для размещения на форуме код скетча с выделением синтаксиса.
Копирует код скетча в буфер обмена как HTML код, для размещения на веб-страницах.
Проверка скетча на ошибки.
Show Sketch Folder
Открывает папку, содержащую файл скетча, на рабочем столе.
Добавляет файл в скетч (файл будет скопирован из текущего места расположения). Новый файл появляется в новой закладке в окне скетча. Файл может быть удален из скетча при помощи меню закладок.
Данная опция оптимизирует код, например, выстраивает в одну линию по вертикали открывающую и закрывающую скобки и помещает между ними утверждение.
Выбор используемой платформы. Список с описанием платформ приводится ниже.
Меню содержит список последовательных устройств передачи данных (реальных и виртуальных) на компьютере. Список обновляется автоматически каждый раз при открытии меню Tools.
Пункты данного меню позволяют записать Загрузчик (Bootloader) в микроконтроллер на платформе Arduino. Данное действие не требуется в текущей работе с Arduino, но пригодится, если имеется новый ATmega (без загрузчика). Перед записью рекомендуется проверить правильность выбора платформы из меню. При использовании AVR ISP необходимо выбрать соответствующий программатору порт из меню Serial Port.
Средой Arduino используется принцип блокнота: стандартное место для хранения программ (скетчей). Скетчи из блокнота открываются через меню File > Sketchbook или кнопкой Open на панели инструментов. При первом запуске программы Arduino автоматически создается директория для блокнота. Расположение блокнота меняется через диалоговое окно Preferences.
Закладки, Файлы и Компиляция
Позволяют работать с несколькими файлами скетчей (каждый открывается в отдельной закладке). Файлы кода могут быть стандартными Arduino (без расширения), файлами С (расширение *.с), файлами С++ (*.срр) или головными файлами (.h).
Загрузка скетча в Arduino
Смотрите данную инструкцию для написания собственной библиотеки.
Аппаратные средства других разработчиков
Подробная информация по созданию сборок описаний аппаратных средств других производителей находится на страницах сайта Google Code.
Мониторинг последовательной шины (Serial Monitor)
Отображает данные посылаемые в платформу Arduino (плата USB или плата последовательной шины). Для отправки данных необходимо ввести текст и нажать кнопку Send или Enter. Затем выбирается скорость передачи из выпадающего списка, соответствующая значению Serial.begin в скетче. На ОС Mac или Linux платформа Arduino будет перезагружена (скетч начнется сначала) при подключении мониторинга последовательной шины.
Имеется возможность обмена информацией с платформой через программы Processing, Flash, MaxMSP и т.д. (см. подробности на странице описаний интерфейсов).
При выполнении данного курсового проекта была изучена архитектура микроконтроллера ATmega132 фирмы AVR и построена на его основе платформа Arduino. Приобретены навыки программирования микропроцессорных систем и построения на их основе систем управления химико-технологическим процессом.
Список использованных литературных источников
Теги: Структура и использование микроконтроллеров Реферат Информатика, ВТ, телекоммуникации
Читайте также: