
Механические характеристики электродвигателей реферат
Обновлено: 30.06.2024
Повторим и разовьем это понятие.
Механической характеристикой двигателя, независимо от рода тока, называют зави
симость угловой скорости вала двигателя ω ( далее – двигателя ) от электромагнитного мо
мента двигателя М, т.е зависимость ω (М).
Здесь следует сделать важное замечание: в соответствии с уравнением моментов
М = М, в установившемся режиме электромагнитный момент двигателя определяется
величиной статического момента механизма. Это означает, что величина электромагнит-
ного момента двигателя полностью зависит от момента механизма – чем больше тормоз-
ной момент механизма, тем больше вращающий момент двигателя, и наоборот. Иначе го-
воря, для любого двигателя входной величиной является момент механизма, а выходной – его скорость.
Различают естественные и искусственные механические характеристикиэлектро
Естественная механическая характеристика - это зависимость ω ( М ), снятая при нормальных условиях работы двигателя, т.е. при номинальных параметрах питающей сети и отсутствии добавочных резисторов в цепях обмоток двигателей.
К параметрам питающей сети относят:: на постоянном токе – напряжение, на пере-
менном – напряжение и частота тока.
Характеристики, снятые при условиях, отличных от нормальных, называют искус-
Искусственные характеристики можно получить путем изменения параметров само
го двигателя, например, путем введения резисторов в цепь обмотки якоря двигателя посто
янного тока или в цепь обмотки статора асинхронного двигателя, либо изменением пара-
метров питающей сети, т.е. напряжения и частоты переменного тока.
Каждый электродвигатель имеет одну естественную и множество искусственных
характеристик. Число последних зависит от числа ступеней регулирующего элемента, на-
пример, числа ступеней регулировочного реостата в цепи обмотки якоря двигателя посто-
янного тока. Если у двигателя таких ступеней – пять, то такой двигатель имеет шесть ха-
рактеристик – пять искусственных и одну естественную.
Искусственные механические характеристики применяются для получения таких режимов работы двигателя, как регулирование скорости, реверс, электрическое торможе
Рассмотрим естественные механические характеристики двигателей разных типов.
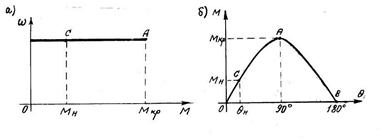
Рис. 8.4. Естественная механическая ( а ) и угловая ( б ) характеристики синхрон
ного двигателя; θ – угол отставания оси ротора от оси магнитного поля обмотки статора
Естественная механическая характеристика синхронного двигателя ( рис. 8.1, а ) – абсолютно жесткая, потому что ее жесткость
β = ΔМ / Δω = ΔМ / 0 = ∞.
Иначе говоря, при изменении электромагнитного момента М двигателя в широких пределах скорость двигателя не изменяется.
Cтабильность скорости ротора синхронного двигателя объясняется при помощи угловой характеристики синхронного двигателя θ ( М ) следующим образом ( рис.8.14, б ).
Если механическая нагрузка к ротору не приложена, то оси ротора и вращающегося магнитного поля обмотки статора совпадают, т.е. θ = 0° ( точка 0 на рис. 8.14, б ). Электромагнитный момент двигателя М = 0, двигатель работает в режиме холостого хода.
Если приложить к валу двигателя механическую нагрузку и увеличивать ее, то ро-
тор под действием механической нагрузки станет отставать от магнитного поля обмотки статора на все больший угол θ. Чем больше механическая нагрузка на валу, тем больше этот угол и тем больше вращающий электромагнитный момент двигателя.
Такое одновременное увеличение вращающего момента двигателя, вызываемое уве
личением тормозного момента механизма как раз и обеспечивает стабильность скорости двигателя ( на рис. 8.4, а участок характеристики от М = 0 до М = М).
Однако постоянство скорости двигателя сохраняется до тех пор, пока угол θ≤90°.
При θ = 90° двигатель развивает критический ( максимальный ) момент М( точка А на рис. 8.4, а ).
Если при θ = 90° вновь увеличить механическую нагрузку ( θ > 90° ), электромаг-
нитный момент двигателя станет уменьшаться ( отрезок АВ угловой характеристики ), т.е
этот момент окажется меньше тормозного момента механизма. В результате скорость рото
ра двигателя станет уменьшаться, и в конце концов ротор остановится.
Поскольку при этом скорость ротора меньше скорости вращающегося магнитного поля обмотки статора, говорят, что двигатель выпал из синхронизма.
Как следует из угловой характеристики двигателя, условие выпадения двигателя из синхронизма такое: : θ≤90°.
На практике номинальный угол θ= 20…40°.
Область применения синхронных двигателей: на судах – в качестве гребных элект-
родвигателей, вращающих винты; на берегу – для привода мощных механизмов, напри-
мер, компрессоров на газоперекачивающих станциях.
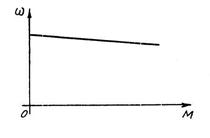
Рис. 8.5. Естественная механическая характеристика двигателя постоянного тока параллельного возбуждения
Естественная механическая характеристика двигателя постоянного тока паралель-
ного возбуждения ( рис. 8.5 ) – жесткая, потому что ее жесткость
Это означает, что при изменении электромагнитного момента двигателя в широких пределах его скорость достаточна стабильна ( т.е. изменяется незначительно ).
Такие двигатели применяются там, где при изменении нагрузки механизма в широ-
ких пределах скорость двигателя не должна изменяться резко - в электроприводах насо-
сов, вентиляторов и т.п.
Естественная механическая характеристика двигателя постоянного тока последова-
тельного возбуждения ( рис. 8.6 ) – мягкая, потому что ее жесткость
Это означает, что при изменении электромагнитного момента двигателя даже в не-
больших пределах его скорость изменяется значительно.
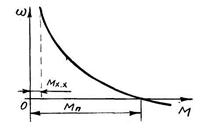
Рис. 8.6. Естественная механическая характеристика двигателя постоянного тока последовательного возбуждения
Напомним две характерные особенности этого двигателя:
- при уменьшении механической нагрузки на валу или ее отсутствии ( М = М)
тель нельзя оставлять без нагрузки на валу;
- При пуске двигатель развивает пусковые моменты Мгораздо большие, чем у дви-
гателей других типов.
Эти двигатели не применяются на судах, но применяются на берегу, например, в электротранспорте, в частности, в троллейбусах, где они не остаются без нагрузки на валу и где нужны большие пусковые моменты ( при трогании троллейбуса с места ).
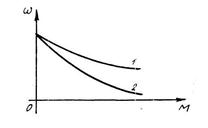
Рис. 8.7. Естественные механическиея характеристики двигателей постоянного тока смешанного возбуждения: 1- с параллельно-последовательным возбуждением;
2 - с последовательно- параллельным возбуждением
Естественная механическая характеристика двигателя постоянного тока смешанно-
го возбуждения является промежуточной между характеристиками двигателей паралель-
ного и последовательного возбуждения, т.к. магнитный поток возбуждения создается сов-
местным действием обеих обмоток – параллельной и последовательной.
Различают два вида двигателей смешанного возбуждения:
1. с параллельно-последовательным возбуждением, у которых основную часть ре-
зультирующего магнитного потока создает параллельная обмотка ( до 70%, остальные 30% - последовательная );
2. с последовательно- параллельным возбуждением, у которых основную часть ре-
зультирующего магнитного потока создает последовательная обмотка ( до 70%, остальные 30% - параллельная ).
Поэтому график механической характеристики двигателя первого вида более жест-кий, чем у двигателя второго вида.
Обе механические характеристики - мягкие, потому что их жесткость
β = ΔМ / Δω = ΔМ / 0 > 10%.
На судах двигатели смешанного возбуждения применяются в регулируемых элект-
роприводах – лебедках, кранах, брашпилях и шпилях.
Естественная механическая характеристика асинхронного двигателя имеет два участка – нерабочий ( разгонный ) АВ и рабочий ВСD ( рис. 8.8 ).
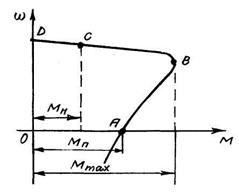
Рис. 8.8. Естественная механическая характеристика асинхронного двигателя
При пуске двигатель развивает пусковой момент М( отрезок ОА ), после чего раз
гоняется по траектории АВС до точки С. При этом на участке АВ одновременно увеличи-
ваются как скорость, так и момент, в точке В двигатель развивает максимальный момент М. На участке ВС скорость продолжает увеличиваться, а момент уменьшается, вплоть до номинального ( точка С ). На участке BC двигатель перегружен, т.к. в любой точке этого участка электромагнитный момент двигателя больше номинального ( М >
В нормальних условиях двигатель работает на участке СD, жесткость которого
Дети в семье, как цветы, за ними нужен уход, но когда они вырастут - вы в убытке не останетесь! © Александр Дьяков ==> читать все изречения.
Название работы: Механические характеристики электродвигателей
Предметная область: Физика
Описание: Скорость почти всех электродвигателей является убывающей функцией момента двигателя, то есть с увеличением момента скорость уменьшается [чил 33]. Но степень изменения скорости у разных электродвигателей различна и характерезуется параметром жесткость механические характеристик.
Дата добавления: 2014-03-28
Размер файла: 86.95 KB
Работу скачали: 90 чел.
Механические характеристики электродвигателей
1. Естественные и искусственные механические характеристики электродвигателей
- Жесткость механических характеристик
- Естественная механическая характеристика двигателя постоянного тока параллельного возбуждения
- Естественная механическая характеристика двигателя постоянного тока последовательного возбуждения
- Естественная механическая характеристика асинхронного двигателя
- Механическая характеристика синхронного двигателя. Область применения синхронных двигателей на судах
Механической характеристикой двигателя, независимо от рода тока, называют зависимость угловой скорости вала электродвигателя ω (далее двигателя) от электромагнитного момента двигателя , т.е зависимость ω ().
Здесь следует сделать важное замечание: в соответствии с уравнением моментов, в установившемся режиме = , электромагнитный момент двигателя уравновешивается статическ им момент ом ( момент ом сопротивления) механизма. Это означает, что величина электромагнитного момента двигателя полностью зависит от момента механизма чем больше тормозной момент механизма, тем больше вращающий момент двигателя, и наоборот.
То есть, для любого двигателя входной величиной является момент механизма, а выходной его скорость .
Скорость почти всех электродвигателей является убывающей функцей момента двигателя, то есть с увеличением момента скорость уменьшается [чил 33]. Но степень изменения скорости у разных электродвигателей различна и характерезуется параметром жесткость механические характеристик.
Жёсткость механические характеристик электропривода β это отношение разности электромагнитных моментов двигателя при разных скоростях к соответствующуй разности угловых скоростей электропривода .
β = ( М 2 М 1 ) /( ω 2 ω 1 ) = Δ / Δω
Обычно на рабочих участках механические характеристики электродвигателей имеют отрицательную жёсткость β 2 1 ,
М 1 М 2 ) при большей скорости электромагнитный момент меньше.
Различают естественные и искусственные механические характеристик и электродвигателей .
Естественная механическая характеристика это зависимость ω(), снятая при нормальных условиях работы двигателя, т.е. при номинальных параметрах питающей сети и отсутствии добавочных резисторов в цепях обмоток двигателей.
К параметрам питающей сети относятся: при постоянном токе напряжение, при переменном токе напряжение и частота тока.
Характеристики, снятые при условиях, отличных от нормальных , называют искусственными .
Искусственные характеристики можно получить путем изменения параметров двигателя, например, путем введения резисторов в цепь обмотки якоря двигателя постоянного тока или в цепь обмотки ротора асинхронного двигателя, либо изменением параметров питающей сети, т.е. напряжения и частоты переменного тока.
Каждый электродвигатель имеет одну естественную и множество искусственных характеристик. Число искусственных характеристик зависит от числа ступеней регулирующего элемента, например, числа ступеней регулировочного реостата в цепи обмотки якоря двигателя постоянного тока. Если у двигателя таких ступеней пять, то такой двигатель имеет шесть характеристик пять искусственных и одну естественную.
Искусственные механические характеристики применяются для получения таких режимов работы двигателя, как регулирование скорости, реверс, электрическое торможение, и др.
Рассмотрим естественн ые механические характеристики двигателей разных типов .

Рис. 10.1 Естественная механическая (а) и угловая (б) характеристики синхронного двигателя; θ угол отставания оси ротора от оси магнитного поля обмотки статора
Естественная механическая характеристика синхронного двигателя
Естественная механическая характеристика синхронного двигателя (рис. 10.1а ) абсолютно жесткая это характеристика при которой скорость с изменением момента не изменяется , ее жесткость (β = ∞)
C табильность скорости ротора синхронного двигателя объясняется угловой характеристики синхронного двигателя θ() следующим образом ( рис. 10.1 б ), если механическая нагрузка к ротору не приложена, то оси ротора и вращающегося магнитного поля обмотки статора совпадают, т.е. θ = 0° (точка 0 на рис. 10.1 б). Если электромагнитный момент двигателя М = 0, двигатель работает в режиме холостого хода.
Если приложить к валу двигателя механическую нагрузку и увеличивать ее, то ротор под действием механической нагрузки станет отставать от магнитного поля обмотки статора на все больший угол θ.
Чем больше механическая нагрузка на валу, тем больше этот угол и тем больше вращающий электромагнитный момент двигателя.
Такое одновременное увеличение вращающего момента двигателя, вызываемое увеличением тормозного момента механизма как раз и обеспечивает стабильность скорости двигателя ( на рис. 10.1 а участок характеристики от = 0 до = ).
Однако постоянство скорости двигателя сохраняется до тех пор, пока угол θ≤90°. При θ = 90° двигатель развивает критический (максимальный) момент (точка А на рис. 10.1 а).
Если при θ = 90° вновь увеличить механическую нагрузку (θ > 90°), электромагнитный момент двигателя станет уменьшаться (отрезок АВ угловой характеристики), т.е. этот момент окажется меньше тормозного момента механизма. В результате скорость ротора двигателя станет уменьшаться, и в конце концов ротор остановится.
Поскольку при этом скорость ротора меньше скорости вращающегося магнитного поля обмотки статора, говорят, что двигатель выпал из синхронизма.
Как следует из угловой характеристики двигателя, условие выпадения двигателя из синхронизма такое: θ≤90°.
На практике номинальный угол θ= 20…40°.
Область применения синхронных двигателей: на судах в качестве гребных электродвигателей, вращающих винты; на берегу для привода мощных механизмов, например, компрессоров на газоперекачивающих станциях.
Естественная механическая характеристика двигателя постоянного тока
Естественная механическая характеристика двигателя постоянного тока паралельного возбуждения ( рис. 8.5 ) ж ё сткая , потому что ее жёсткость

Рис. 10.2 Естественная механическая характеристика двигателя постоянного тока параллельного возбуждения
Это означает, что при изменении электромагнитного момента двигателя в широких пределах его скорость достаточно стабильна (т.е. изменяется незначительно).
Такие двигатели применяются там, где при изменении нагрузки механизма в широких пределах скорость двигателя не должна изменяться резко в электроприводах насосов, вентиляторов и т.п.

Рис. 10.3 Естественная механическая характеристика двигателя постоянного тока последовательного возбуждения
Естественная механическая характеристика двигателя постоянного тока последовательного возбуждения (рис. 10.3 ) мягкая , потому что ее жёсткость
Это означает, что при изменении электромагнитного момента двигателя даже в небольших пределах его скорость изменяется значительно.
Напомним две характерные особенности этого двигателя двигателя постоянного тока последовательного возбуждения :
- П ри уменьшении механической нагрузки на валу или ее отсутствии ( = )
- При пуске двигатель развивает пусковые моменты больше, чем у двигателей других типов.
Эти двигатели не применяются на судах, но применяются на берегу, например, в электротранспорте, в частности, в троллейбусах, где они не остаются без нагрузки на валу и где нужны большие пусковые моменты (при трогании троллейбуса с места).

Рис. 10.4 Естественные механические характеристики двигателей постоянного тока смешанного возбуждения: 1 с параллельно-последовательным возбуждением;
2 - с последовательно параллельным возбуждением
Естественная механическая характеристика двигателя постоянного тока смешанного возбуждения промежуточная между характеристиками двигателей паралельного и последовательного возбуждения, т.к. магнитный поток возбуждения создается совместным действием обеих обмоток параллельной и последовательной.
Различают два вида двигателей смешанного возбуждения:
- с паралельно последовательным возбуждением, у которых основную часть результирующего магнитного потока создает параллельная обмотка (до 70%, остальные 30% последовательная);
2. с последовательно параллельным возбуждением, у которых основную часть результирующего магнитного потока создает последовательная обмотка (до 70%, остальные 30% параллельная).
Поэтому график механической характеристики двигателя первого вида более жесткий, чем у двигателя второго вида.
Обе механические характеристики мягкие , потому что их жесткость
На судах двигатели смешанного возбуждения применяются в регулируемых электроприводах лебедках, кранах, брашпилях и шпилях.
Естественная механическая характеристика асинхронного двигателя
Естественная механическая характеристика асинхронного двигателя имеет два участка нерабочий (разгонный) АВ и рабочий ВС D (рис. 8.8).

Рис. 10.5 Естественная механическая характеристика асинхронного двигателя
При пуске двигатель развивает пусковой момент (отрезок ОА), после чего разгоняется по траектории АВС до точки С. При этом на участке АВ одновременно увеличиваются как скорость, так и момент, в точке В двигатель развивает максимальный момент . На участке ВС скорость продолжает увеличиваться, а момент уменьшается, до номинального (точка С). На участке BC двигатель перегружен , т.к. в любой точке этого участка электромагнитный момент двигателя больше номинального ( > > ).
В нормальних условиях двигатель работает на участке С D , жесткость которого
Это означает, что при изменении момента в широких пределах скорость двигателя изменяется незначительно.
Асинхронные двигатели нашли самое широкое применение на судах с электростанцией на переменном токе.
Промышленность выпускает специально для судов асинхронные двигатели разных серий, например, 4А…ОМ2 (четвертая серия асинхронных двигателей), МАП (морской асинхронный полюсопереключаемый), МТ F ( c фазным ротором) и др.
При этом двигатели серии 4А односкоростные, серии МАП двух- и трехскоростные, серии МТ F число скоростей определяется схемой управления ( до 5 скоростей ).
3.1 Расчет и построение графиков переходных процессов и M(t) при разгоне привода от нулевой начальной скорости до рабочей
3.2 Расчет и построение графиков переходных процессов и M(t) при переводе привода из положения "Подъем" с рабочей скоростью в положение "Спуск" при опускании пустой крюковой подвески в режиме рекуперативного торможения со скоростью щ>щ0

3.3 Расчет и построение графиков переходных процессов и M(t) при торможении электропривода в конце подъема груза, определение места
установки конечного выключателя, ограничивающего высоту подъема крюковой подвески
4. Разработка принципиальной электрической схемы электропривода
Объект проектирования: электропривод с двигателем постоянного тока.
Цель работы: выбрать электродвигатель по мощности, рассчитать и построить механические характеристики электропривода в рабочих режимах и электромеханические переходные процессы в электроприводе, разработать принципиальную электрическую схему электропривода.
ЭЛЕКТРОПРИВОД, РАСЧЕТ, МОЩНОСТЬ, СКОРОСТЬ, ХАРАКТЕРИСТИКА, СТРУКТУРА, СХЕМА, ПРОЦЕСС.
Электроприводом называется электромеханическая система, состоящая из электродвигательного, преобразовательного, передаточного и управляющего устройств, предназначенных для приведения в движение исполнительных органов рабочей машины и управления этим движением.
Нельзя представить себе ни одного современного производственного механизма, в любой области техники, который не приводился бы в действие электроприводом. В электроприводе основным элементом, непосредственно преобразующим электрическую энергию в механическую, является электродвигатель, который чаще всего управляется при помощи соответствующих преобразовательных и управляющих устройств с целью формирования статических и динамических характеристик электропривода, отвечающих требованиям производственного механизма.
Целью данной курсовой работы является расчет электродвигателя, входящего в состав электропривода механизма подъема мостового крана, а также создание системы управления электроприводом, которая бы обеспечила заданные режимы его работы.
1.1 Статическая нагрузочная диаграмма электропривода
Для построения статической нагрузочной диаграммы необходимо найти статические моменты на двигателе, мощности и время на переходах.
Определим время подъема и опускания груза (крюковой подвески):

Все необходимые промежутки времени определяются с помощью пакета Mathcad 8
Определим продолжительность цикла:

Продолжительность включения механизма в статике:

Определим статические моменты на валу электродвигателя при подъеме и опускании грузов (крюковой подвески):

Таким образом, статическая диаграмма будет состоять из следующих участков: подъем груза (tр1), остановка механизма на время (to1), опускание груза (tр2), остановка на время разгрузки (to2), подъем крюковой подвески (tр3), остановка механизма подъема на время перемещения крюковой подвески к месту загрузки (to3), опускание крюковой подвески (tр4), остановка механизма на время загрузки (to4). Диаграмма представлена на рисунке 1.1.

Рисунок 1.1 — Статическая нагрузочная диаграмма
1.2 Предварительный выбор электродвигателя по мощности и скорости
Мощность электродвигателя с ближайшей стандартной продолжительностью включения ПВст выбираем из условия подъема номинального груза по расчетной мощности:

Т.к. tц>10 мин, то выбирается двигатель со стандартной продолжительностью включения ПВ=100% по условию Рн*100%>=Ррасч
Номинальную частоту вращения двигателя определим из формулы:

Исходя из условий nн> nр и Рн*100%>=Ррасч выберем электродвигатель постоянного тока 4ПФ160S. Он обладает следующими параметрами:
-мощность 15 кВт;
-ток якоря 79.6 А;
-номинальная частота вращения 850 об/мин;
-максимальная частота 4000 об/мин;
-напряжение якоря 220 В;
1.3 Динамическая нагрузочная диаграмма электропривода
Определим динамический пусковой момент по формуле:

Где М1 и М2 – максимальный и минимальный пусковые моменты соответственно

Где ш – кратность пусковых моментов
Определим время подъема и опускания груза , для этого:

Момент инерции якоря

Момент инерции муфты с тормозным шкивом

Суммарный , приведенный момент инерции


Угловая скорость вращения вала двигателя
Время пуска привода для каждой операции

Для определения времени электрического торможения механизма подъема найдем суммарный приведенный момент инерции при торможении



Где Kт – коэффициент запаса торможения.

Уточненное значение продолжительности включения


Число циклов в час
 |
1.4 Проверочный расчет электродвигателя по нагреву
Определим эквивалентный момент по данным динамической нагрузочной диаграммы

Коэффициенты, учитывающие ухудшение условий охлаждения двигателя при пусках и торможениях


Эквивалентная мощность, соответствующая моменту эквивалентному

Должно выполняться условие

Т.е. оно выполняется
1.5 Проверочный расчет электродвигателя по условиям пуска

.
1.6 Проверочный расчет электродвигателя по условиям допустимой перегрузки

2 Механические характеристики электропривода в рабочих режимах
2.1 Расчет и построение естественной и рабочей механических характеристик электропривода в двигательном режиме работы, определение величины сопротивления рабочей секции, статизма электропривода
Естественную характеристику электропривода построим по точкам с координатами и .

Необходимые для построения значения скоростей найдем как:
Скорость холостого хода



- Активное сопротивление обмотки якоря
Механические характеристики асинхронного двигателя (АД).
Устройство а синхронной машины.
студента __2___ курса
(группа АВЭЭ - /06/3,5 )
Ваховского Владимира Александровича
проф., докт. техн. наук А.И. Ракаев
Механические характеристики асинхронного двигателя (АД).
2. Асинхронные машины.
3. Уравнение механической характеристики асинхронного двигателя.
4. Линеаризация механической характеристики асинхронного двигателя.
5. Механические характеристики асинхронных двигателей при симметричных режимах
6. Тормозные режимы асинхронных двигателей
7. Технические реализации. Применения
8. Устройство а синхронной машины.
9. Принцип действия Асинхронные машины.
10 . Список литературы
Механические характеристики асинхронного двигателя (АД).
Электроприводы переменного тока широко применяются в промышленности, транспорте, строительной индустрии и других отраслях народного хозяйства. Их преимущественное распространение обусловлено: высокой надежностью машины переменного тока из-за отсутствия коллектора, простотой управления нерегулируемыми приводами, поскольку большинство из них непосредственно включается в сеть, низкой стоимостью электрических машин и простыми требованиями к их обслуживанию и правилами эксплуатации.
В зависимости от типа используемого двигателя различают не только приводы переменного и постоянного тока, но и асинхронные, синхронные, шаговые и другие разновидности приводов. Однако не следует думать, что приводы переменного тока везде и всюду могут применяться вместо приводов постоянного тока. Для каждого вида привода имеются сложившиеся области перспективного использования. Причем трудно однозначно и определенно перечислить наперед все факторы, которые определяют выбор рода тока для привода. Наряду с традиционными приводами, построенными на базе асинхронных и синхронных машин, в последние десятилетия применяют приводы переменного тока с универсальными и шаговыми двигателями, двигателями двойного питания и с электромагнитной редукцией скорости.
2. Асинхронные машины.
Принцип действия асинхронной машины в самом общем виде состоит в следующем: один из элементов машины - статор используется для создания движущегося с определенной скоростью магнитного поля, а в замкнутых проводящих пассивных контурах другого элемента-ротора наводятся ЭДС, вызывающие протекание токов и образование сил (моментов) при их взаимодействии с магнитным полем. Все эти явления имеют место при несинхронном-асинхронном движении ротора относительно поля, что и дало машинам такого типа название - асинхронные.
Несмотря на простоту физических явлений и материализующих их конструктивов, полное математическое описание процессов в асинхронной машине весьма сложно:
во-первых, все напряжения, токи, потокосцепления -переменные, т.е. характеризуются частотой, амплитудой, фазой или соответствующими векторными величинами;
во-вторых, взаимодействуют движущиеся контуры, взаимное расположение которых изменяется в пространстве;
в-третьих, магнитный поток нелинейно связан с намагничивающим током (проявляется насыщение магнитной цепи), активные сопротивления роторной цепи зависят от частоты (эффект вытеснения тока), сопротивления всех цепей зависят от температуры и т.п.
Рассмотрим самую простую модель асинхронной машины, пригодную для объяснения основных явлений в асинхронном электроприводе.
Механические характеристики двигателя полностью определяют качество работы электромеханической системы в установившемся режиме и ее производительность. Они также влияют и на динамические режимы электропривода, характеризуя избыточный динамический момент, определяющий ускорение или замедление двигателя
3. Уравнение механической характеристики асинхронного двигателя
В современной практике проектирования используются программы, учитывающие при расчете механических характеристик намагничивание магнитной системы машины Но при этом теряется наглядность в их исследовании. Поэтому все дальнейшие зависимости будут найдены при выполнении этого основного допущения.
Подведенная к двигателю из сети электрическая мощность расходуется на покрытие потерь в контуре намагничивания p μ , в меди статора p M 1 , и остаток ее преобразуется в электромагнитную мощность. Таким образом,
где ω 0 = 2π f 1 / p - число пар полюсов статора машины.
После незначительных преобразований, найдем
Следовательно, зависимость M = f ( s ) является сложной функцией от скольжения. Исследуем ее на экстремум, взяв производную
Приравняв числитель выражения (4-15) нулю, найдем значение критического скольжения s K , при котором зависимость М = f ( s ) имеет максимум:
Физически уменьшение М при s s K и s > s K объясняется следующим. При s s K уменьшение скольжения сопряжено с уменьшением тока и момента двигателя, а при s > s K , хотя и происходит увеличение тока двигателя, но его активная составляющая, обусловливающая электромагнитный момент, не растет, а уменьшается, что также приводит к уменьшению момента, развиваемого двигателем.
Положительный знак s K соответствует двигательному, а отрицательный - генераторному режиму работы машины.
Следует иметь в виду, что, как у машины постоянного тока, относительная величина r 1 уменьшается при увеличении мощности машин и уже для двигателей мощностью 100 кВт составляет 10-15% величины x 1 + x 2 '. Поэтому формулу (4-16) можно использовать в упрощенной форме, пренебрегая r 1
где x К.З - индуктивное приведенное сопротивление короткого замыкания.
Этого нельзя делать для машин средней и особенно малой мощности, у которых сопротивление r 1 соизмеримо с x К.З .
Используя формулы (4-14) и (4-16), можно получить иную запись механической характеристики асинхронного двигателя, если найти значения его критических моментов в двигательном М К.Д и генераторном М К.Г режимах работы:
Отношение критических моментов
Здесь принято часто используемое обозначение:
Формула (4-19) показывает, что значение критического момента машины в генераторном режиме может быть существенно больше, чем в двигательном режиме (см. рис. 4-8).
Для практического использования удобнее иное, чем в формуле (4-14), выражение механической характеристики асинхронного двигателя. Найдем его, используя формулы (4-14), (4-17) и (4-20):
Если пренебречь влиянием активного сопротивления статора, то ε = 0, и формула (4-21) приобретает такой вид (при М К.Д = М К.Г = М К ):
Впервые выражение (4-22) получил М. Kloss [18], поэтому его называют формулой Клосса.
Формулы (4-21) или (4-22) удобнее для расчетов, чем (4-14), поскольку они не требуют знания параметров двигателя. В этом случае все расчеты производятся по данным каталога. Ввиду того, что значение s K в каталогах не указано, его приходится определять на основе других сведений, например, величины перегрузочной способности машины М К / М НОМ = λ М . Тогда из формулы (4-21) получим:
откуда, решая квадратное уравнение, найдем
где γ = λ М + (1 - λ М )ε.
В выражении (4-24) следует брать перед корнем знак плюс, поскольку другое значение s K противоречит физическому смыслу.
Приближенное решение уравнения (4-24) можно получить при коэффициенте ε = 0, но лучше определить его значение. Наиболее достоверные результаты будут получены, если, располагая параметрами машины, величину ε определять из формулы (4-20), a s K - из выражения (4-16). Для асинхронных двигателей с фазным ротором выражения (4-14) и (4-21) дают более достоверные результаты, так как в этих машинах менее заметны влияния насыщения стали и вытеснения тока в обмотках ротора (скинэффект).
Похожие страницы:
Расчет механических характеристик асинхронных двигателей с короткозамкнутым ротором
. . 3) Произвести расчет механической характеристики асинхронного двигателя в режиме динамического торможения. 4) Построить механические характеристики исполнительного механизма и асинхронного двигателя в двигательном и тормозном .
Трехфазный асинхронный двигатель
. механическую характеристику асинхронного двигателя. Рисунок 2. График механических характеристик асинхронного двигателя (зависимость момента М от скольжения S Заключение Диапазон рабочих характеристик асинхронного двигателя соответствует .
Исследование асинхронного двигателя с фазным ротором
. , опытному и расчетному методам определения рабочих и механических характеристик асинхронного двигателя с фазным ротором, а также по оценке .
Построение механических характеристик асинхронного двигателя
. двигателя построить естественную и искусственную характеристики Решение: Для асинхронного двигателя с фазным ротором естественная характеристика . Ом. Рис 1. Механические характеристики , S =. М S Вопрос №2 Для двигателя постоянного тока параллельного .
Асинхронный двигатель с короткозамкнутым ротором
. . Экспериментально определить механическую характеристику n(M), зависимость механического момента на валу двигателя от скольжения M(S), рабочие характеристики асинхронного двигателя n(P2 .
Читайте также: