
Космическая навигация при проведении полевых работ реферат
Обновлено: 05.07.2024
Идея создания спутниковой навигации родилась ещё в 50-е годы. В тот момент, когда СССР был запущен первый искусственный спутник Земли, американские учёные во главе с Ричардом Кершнером, наблюдали сигнал, исходящий от советского спутника и обнаружили, что благодаря эффекту Доплера частота принимаемого сигнала увеличивается при приближении спутника и уменьшается при его отдалении. Суть открытия заключалась в том, что если Вы точно знаете свои координаты на Земле, то становится возможным измерить положение спутника, и наоборот, точно зная положение спутника, можно определить собственные координаты.
Реализована эта идея была через 20 лет. Первый тестовый спутник выведен на орбиту 14 июля 1974 г. США, а последний из всех 24 спутников, необходимых для полного покрытия земной поверхности, был выведен на орбиту в 1993 г., таким образом Глобальная система позиционирования или сокращённо GPS встала на вооружение. Стало возможным использовать GPS для точного наведения ракет на неподвижные, а затем и на подвижные объекты в воздухе и на земле. Также с помощью системы вмонтированной в спутники стало реально определять мощные ядерные заряды, находящиеся на поверхности планеты.
Первоначально GPS – глобальная система позиционирования, разрабатывалась как чисто военный проект. Но после того, как в 1983 г. был сбит вторгшийся в воздушное пространство Советского Союза самолёт Корейских Авиалиний с 269 пассажирами на борту, президент США Рональд Рейган разрешил частичное использование системы навигации для гражданских целей. Но точность была уменьшена специальным алгоритмом.
Затем появилась информация о том, что некоторые компании расшифровали алгоритм уменьшения точности и с успехом компенсируют эту составляющую ошибки, и в 2000 г. это загрубление точности было отменено указом президента США.
1. Спутниковая система навигации
Спутниковая система навигации – комплексная электронно-техническая система, состоящая из совокупности наземного и космического оборудования, предназначенная для определения местоположения (географических координат и высоты), а также параметров движения (скороти и направлення движения и т.д.) для наземных, водных и воздушных объектов.
1.1 Что такое GPS?
Такая точность, во многом, стала возможной благодаря шагам Американского правительства, которое в 2000 году сделало систему GPS доступной и открытой для гражданских пользователей. Напомним, что ранее с помощью специального режима избирательного доступа (SA – Selective Availability) в передаваемый сигнал вносились искажения, снижающие точность позиционирования до 70–100 метров. С 1 мая 2000 года, этот режим был отключен и точность повысилась до 3–10 метров.
Растущая зависимость европейской экономики от системы GPS, и, как следствие, от администрации США, вынудила Европу начать разработку собственной навигационной системы – Galilleo. Новая система во многом похожа на систему GPS.
2. Состав системы GPS
2.1 Космический сегмент
Космический сегмент системы GPS состоит из орбитальной группировки спутников, излучающих навигационные сигналы. Спутники расположены на 6-и орбитах на высоте около 20000 км. Период обращения спутников составляет 12 часов и скорость около 3 км/c. Таким образом, за сутки, каждый спутник совершает два полных оборота вокруг Земли.
Первый спутник был запущен в феврале 1978 года. Его размер с раскрытыми солнечными батареями равнялся 5 метрам, а вес – более 900 кг. Это был спутник первой модификации GPS-I. За последние 30 лет, на орбите сменилось несколько модификаций GPS спутников: GPS II-A, GPS II-R, GPS IIR-M. В процессе модернизации снижался вес спутников, улучшалось стабильность бортовых часов, повышалась надежность.
2.2 Наземный сегмент
В дополнение к наземным GPS станциям существует несколько частных и государственных сетей слежения, которые выполняют измерения навигационных GPS сигналов для уточнения параметров атмосферы и траекторий движения спутников.

2.3 Аппаратура пользователей
3. Работа GPS-навигатора
3.1 Нестабильность часов приемника
Из описанного выше принципа видно, что для определения местоположения достаточно поймать сигналы от двух спутников и построить две пересекающиеся прямые. Однако на практике точность такого метода была бы недостаточной из-за наличия ошибки часов приемника. Дело в том, что спутники, находящиеся на орбите, имеют на борту очень точные и, естественно, дорогостоящие атомные часы. Что же касается GPS-приемников, особенно бытовых, то использование таких часов было бы неоправдано в смысле габаритов и стоимости. Это было одной из серьезных проблем, с которыми столкнулись разработчики – ведь неточность хода часов всего в одну тысячную секунды приводила бы к ошибке более 250 км! Для решения этой проблемы и для возможности использования в GPS-приемниках обычных кварцевых часов (аналогичных тем, которые используются в быту) было предложено использовать не два, а три реперных ориентира, т.е. три пересекающиеся прямые. Как же это работает?
Предположим, что часы GPS-радиоприемника немного спешат, т.е. измеренное время прохождения радиоволн будет больше реального. Это означает, что обе расчитанные линии, и, следовательно, точка их пересечения будут находиться на большем расстоянии от ориентиров (спутников), чем на самом деле. Если же часы отстают, то точка пересечения переместится ближе к спутникам. Возмем теперь третий ориентир (спутник). Легко видеть, что пересечение трех линий даст нам треугольник, размеры и положение которого могут меняться в зависимости от хода часов. Более того, учитывая, что неточность часов для всех трех сигналов будет практически одинаковой, можно автоматически подобрать такую величину коррекции, которая обеспечит пересечение всех трех линий в одной искомой точке.
3.2 Принцип действия GPS
где t – время распространения радиосигнала от спутника до наблюдателя, а с – постоянная величина, равная скорости света. Соответственно, зная время, за которое сигнал дошел от спутника до GPS приемника и, умножив ее на скорость света, можно определить расстояние.

Стоит отметить, что для точного вычисления расстояния часы GPS приемника и GPS спутника должны быть синхронизированы с высокой точностью. Потому что отличие даже в несколько микросекунд приводят к ошибке в несколько десятков километров, а это в свою очередь вносит погрешность в вычисление позиции.
Геометрический фактор определяет относительное расположение GPS приемника и спутников, используемых в подсчете позиции. Его величина влияет на точность определения позиции. Если все спутники расположены в одном направлении от GPS приемника, то площадь пересечения всех окружностей будет достаточно большой. Эта площадь характеризует величину неопределенности измерений, влияющих на точность подсчёта и позиции (рисунок 3).


3.3 Точность системы
Как известно, спутниковая GPS-система оплачивается и находится под контролем Департамента обороны США, который зарезервировал предельную точность исключительно для своих военных целей. Для этого передаваемый спутниками сигнал кодируется с помощью специального Р-кода, который может быть декодирован только военными GPS-приемниками. В дополнение к этому, в сигналы времени от спутниковых атомных часов добавляется случайная ошибка, которая искажает полученные значения координат. В результате точность гражданских GPS-премников ухудшается более чем в 10 раз по сравнению с военными и составляет около 50–150 м.
В действительности, на практике все выглядит несколько сложнее, чем в теории. Это объясняется влиянием на GPS измерения различного рода ошибок. Можно выделить три категории ошибок (рисунок 5):
Ошибки связанны с распространением навигационного сигнала.
Ошибки приемной аппаратуры.

Второй тип системных ошибок связан с неточностью передаваемых эфемерид. В математической модели учитываются множество факторов, влияющих на изменение траектории орбит GPS спутников, но небольшие ошибки все равно присутствуют.
Наиболее существенный вклад в навигационные измерения вносят ошибки, связанные с распространением сигнала атмосфере Земли, а именно в ионосферных и тропосферных ее слоях. Ионосфера Земли представляет собой слой заряженных частиц на высоте от 120 до 200 км. Эти частицы снижают скорость распространения сигнала, и, следовательно, увеличивают его время. Соответственно вносится ошибка в оценку расстояния от GPS приемника до спутника. Эти задержки могут быть смоделированы для разного времени суток, усреднены и внесены в измерения, но, к сожалению, эти модели не могут точно отобразить реальную ситуацию. После прохождения ионосферного слоя, навигационный сигнал попадает в тропосферный слой, в котором происходят все погодные явления и присутствуют водяные пары, также влияющее на скорость распространения сигнала. Для борьбы с ионосферными задержками используют дифференциальные метод определения позиции. Корректирующие поправки передаются с помощью геостационарных спутников WAAS/EGNOS и позволяют повысить точность позиционирования до 1 метра.

3.4 Дифференциальная GPS
4. Современное состояние
В настоящее время работают или готовятся к развёртыванию следующие системы спутниковой навигации:
Принадлежит министерству обороны США, что считается другими государствами её главным недостатком. Более известна под названием GPS. Единственная полностью работающая спутниковая навигационная система.
Глобальная навигационная спутниковая система (ГЛОНАСС) – советская и российская спутниковая система навигации, разработанная по заказу Министерства обороны СССР.
Принадлежит министерству обороны России. Является попыткой восстановить функционировавшую с 1982 года советскую систему. Находится на этапе повторного развёртывания спутниковой группировки (оптимальное состояние орбитальной группировки спутников, запущенных в СССР, было в 1993–1995 гг.). Современная система, по заявлениям разработчиков наземного оборудования, будет обладать некоторыми техническими преимуществами по сравнению с NAVSTAR. Однако в настоящее время эти утверждения проверить невозможно ввиду недостаточности спутниковой группировки и отсутствия доступного клиентского оборудования.
Основой системы должны являться 24 спутника, движущихся над поверхностью Земли в трёх орбитальных плоскостях с наклонением 64,8° и высотой 19100 км. Принцип измерения аналогичен американской системе навигации NAVSTAR.
Развёртываемая в настоящее время Китаем подсистема GNSS, предназначенная для использования только в этой стране. Особенность – небольшое количество спутников, находящихся на геостационарной орбите.
Европейская система, находящаяся на этапе создания спутниковой группировки.
Индийская навигационная спутниковая система, в состоянии разработки. Предполагается для использования только в этой стране. Запуск первого спутника ожидается в 2009 году.
4.1 Создание карт для навигационных систем

5. Системы спутниковой навигации ГЛОНАСС и GPS
Система Глонасс предназначена для глобальной оперативной навигации приземных подвижных объектов. СРНСС разработана по заказу Министерства Обороны. По своей структуре Глонасс так же, как и GPS, считается системой двойного действия, то есть может использоваться как в военных, так и в гражданских целях.
Система в целом включает в себя три функциональные части (в профессиональной литературе эти части называются сегментами).

космический сегмент, в который входит орбитальная группировка искусственных спутников Земли (иными словами, навигационных космических аппаратов);
сегмент управления, наземный комплекс управления (НКУ) орбитальной группировкой космических аппаратов;
аппаратура пользователей системы.
Из этих трёх частей последняя, аппаратура пользователей, самая многочисленная. Система Глонасс является беззапросной, поэтому количество потребителей системы не имеет значения. Помимо основной функции – навигационных определений, – система позволяет производить высокоточную взаимную синхронизацию стандартов частоты и времени на удалённых наземных объектах и взаимную геодезическую привязку. Кроме того, с её помощью можно производить определение ориентации объекта на основе измерений, производимых от четырёх приёмников сигналов навигационных спутников.
В системе Глонасс в качестве радионавигационной опорной станции используются навигационные космические аппараты (НКА), вращающиеся по круговой геостационарной орбите на высоте ~ 19100 км. Период обращения спутника вокруг Земли равен, в среднем, 11 часов 45 минут. Время эксплуатации спутника – 5 лет, за это время параметры его орбиты не должны отличаться от номинальных значений больше чем на 5%. Сам спутник представляет собой герметический контейнер диаметром 1,35 м и длиной 7,84 м, внутри которого размещается различного рода аппаратура. Питание всех систем производится от солнечных батарей. Общая масса спутника – 1415 кг. В состав бортовой аппаратуры входят: бортовой навигационный передатчик, хронизатор (часы), бортовой управляющий комплекс, система ориентации и стабилизации и так далее.



Сегмент наземного комплекса управления системы ГЛОНАСС выполняет следующие функции:
эфемеридное и частотно-временное обеспечение;
мониторинг радионавигационного поля;
радиотелеметрический мониторинг НКА;
командное и программное радиоуправление НКА.
Для синхронизации шкал времени различных спутников с необходимой точностью на борту НКА используются цезиевые стандарты частоты с относительной нестабильностью порядка 10–13. На наземном комплексе управления используется водородный стандарт с относительной нестабильностью 10–14. Кроме того, в состав НКУ входят средства коррекции шкал времени спутников относительно эталонной шкалы с погрешность 3–5 нс.
Американская система GPS по своим функциональным возможностям аналогична отечественной системе Глонасс. Её основное назначение – высокоточное определение координат потребителя, составляющих вектора скорости, и привязка к системной шкале времени. Аналогично отечественной, система GPS разработана для Министерства Обороны США и находится под его управлением. Согласно интерфейсному контрольному документу, основными разработчиками системы являются:
по космическому сегменту – Rockwell International Space Division, Martin Marietta Astro Space Division;
по сегменту управления – IBM, Federal System Company;
по сегменту потребителей – Rockwell International, Collins Avio-nics & Communication Division.
Как и система Глонасс, GPS состоит из космического сегмента, наземного командно-измерительного комплекса и сегмента потребителей.
Как было сказано выше, орбитальная группировка GPS состоит из 28 навигационных космических аппаратов. Все они находятся на круговых орбитах
Если Вам нужна помощь с академической работой (курсовая, контрольная, диплом, реферат и т.д.), обратитесь к нашим специалистам. Более 90000 специалистов готовы Вам помочь.
- Для учеников 1-11 классов и дошкольников
- Бесплатные сертификаты учителям и участникам
Глобальные навигационные спутниковые системы (ГНСС).
Объяснить, что такое ГНСС.
Объяснить общие принципы работы спутниковой навигации(СН).
Описать действующие СНС- GPS и GLONASS , их составляющих (космический и наземный сегменты) и областей применения.
Рассказать, какие СНС готовятся к запуску или находятся в стадии разработки( GALLILEO , COMPASS ).
Объяснить сбои СНС:
Во время солнечных вспышек.
Во время геомагнитных возмущений.
Рассказать о факторах, влияющих на ухудшение точности позиционирования.
Спутниковая навигация: понятие, система, действие.


Сколько существует человечество, столько и решается вопрос о том, как определить свое местоположение на суше и на море, в лесу или в городе. На сегодняшний день отпала необходимость ориентироваться, как древние путешественники и мореплаватели по звездам или компасу. Эпоха открытия радиоволн существенно упростило задачу навигации и открыло новые перспективы перед человечеством во многих сферах жизни и деятельности, а с открытием возможности покорения космического пространства совершился огромный прорыв в области определения координат местоположения объекта на Земле. Искусственные спутники Земли стали опорными станциями для радионавигации и на сегодняшний день системы спутниковой навигации стали доступны не только военным или морякам, но и простым людям, частным лицам и компаниям, для которых навигация необходима.
Понятие: Спутниковая система навигации
— комплексная электронно-техническая система, состоящая из совокупности наземного и космического оборудования, предназначенная для определения местоположения (географических координат и высоты), а также параметров движения (скорости и направления движения и т. д.) для наземных, водных и воздушных объектов.
Действие: Принцип работы спутниковых систем навигации основан на измерении расстояния от антенны на объекте (координаты которого необходимо получить) до спутников, положение которых известно с большой точностью. Таблица положений всех спутников называется альманахом, которым должен располагать любой спутниковый приёмник до начала измерений. Обычно приёмник сохраняет альманах в памяти со времени последнего выключения и если он не устарел — мгновенно использует его. Каждый спутник передаёт в своём сигнале весь альманах.
Таким образом, зная расстояния до нескольких спутников системы, с помощью обычных геометрических построений, на основе альманаха, можно вычислить положение объекта в пространстве. Метод измерения расстояния от спутника до антенны приёмника основан на определённости скорости распространения радиоволн. Для осуществления возможности измерения времени распространения радиосигнала, каждый спутник навигационной системы излучает сигналы точного времени, в составе своего сигнала используя точно синхронизированные с системным временем атомные часы.
При работе спутникового приёмника его часы синхронизируются с системным временем и при дальнейшем приёме сигналов вычисляется задержка между временем излучения, содержащимся в самом сигнале, и временем приёма сигнала. Располагая этой информацией, навигационный приёмник вычисляет координаты антенны. Для получения информации о скорости большинство навигационных приёмников используют эффект Доплера. Дополнительно накапливая и обрабатывая эти данные за определённый промежуток времени, становится возможным вычислить такие параметры движения, как скорость (текущую, максимальную, среднюю), пройденный путь и т. д. В реальности работа системы происходит значительно сложнее.
Ниже перечислены некоторые проблемы, требующие специальных технических приёмов по их решению: Отсутствие атомных часов в большинстве навигационных приёмников. Этот недостаток обычно устраняется требованием получения информации не менее чем с трёх (2-мерная навигация при известной высоте) или четырёх (3-мерная навигация) спутников; (При наличии сигнала хотя бы с одного спутника можно определить текущее время с хорошей точностью). Неоднородность гравитационного поля Земли, влияющая на орбиты спутников; Неоднородность атмосферы, из-за которой скорость и направление распространения радиоволн может меняться в определённых пределах; Отражения сигналов от наземных объектов, что особенно заметно в городе; Невозможность разместить на спутниках передатчики большой мощности, из-за чего приём их сигналов возможен только в прямой видимости на открытом воздухе.
История и перспективы развития.
Долговременная программа развития космической навигационной системы реализовывается по следующим укрупненным этапам:
Эксперты считают, что главные задачи в нынешний период восстановления и развития ГЛОНАСС это:
- развивать орбитальную группировку до 6 плоскостей с 48 спутниками с целью обеспечения высокоточного позиционирования в условиях закрытой местности (такая программа уже принята США);
- обеспечить радиоэлектронную безопасность и независимость системы;
- А главное - привлечь к работе настоящих специалистов, которые способны доложить всю правду о ГЛОНАСС. ГЛОНАСС является приоритетной из всех космических программ, потому что без нее через несколько лет Россия останется беззащитной. Без ГЛОНАСС асимметричный ответ на американскую ПРО и прочие потенциальные угрозы в принципе невозможен. Поэтому президент так настойчиво требует в максимально короткие сроки возродить ГЛОНАСС.
Принцип работы.
Спутники системы ГЛОНАСС непрерывно излучают навигационные сигналы двух типов: навигационный сигнал стандартной точности (СТ) в диапазоне L1 (1,6 ГГц) и навигационный сигнал высокой точности (ВТ) в диапазонах L1 и L2 (1,2 ГГц). Информация, предоставляемая навигационным сигналом СТ, доступна всем потребителям на постоянной и глобальной основе и обеспечивает, при использовании приёмников ГЛОНАСС, возможность определения:
* горизонтальных координат с точностью 50-70 м (вероятность 99,7%);
* вертикальных координат с точностью 70 м (вероятность 99,7%);
* составляющих вектора скорости с точностью 15 см/с (вероятность 99,7%)
* точного времени с точностью 0,7 мкс (вероятность 99,7%).
Эти точности можно значительно улучшить, если использовать дифференциальный метод навигации и/или дополнительные специальные методы измерений.
Сигнал ВТ предназначен, в основном, для потребителей Министерства обороны России, и его несанкционированное использование не рекомендуется. Вопрос о предоставлении сигнала ВТ гражданским потребителям находится в стадии рассмотрения.
Для определения пространственных координат и точного времени требуется принять и обработать навигационные сигналы не менее чем от 4-х спутников ГЛОНАСС. При приёме навигационных радиосигналов ГЛОНАСС приёмник, используя известные радиотехнические методы, измеряет дальности до видимых спутников и измеряет скорости их движения.
Одновременно с проведением измерений в приёмнике выполняется автоматическая обработка содержащихся в каждом навигационном радиосигнале меток времени и цифровой информации. Цифровая информация описывает положение данного спутника в пространстве и времени (эфемериды) относительно единой для системы шкалы времени и в геоцентрической связанной декартовой системе координат. Кроме того, цифровая информация описывает положение других спутников системы (альманах) в виде кеплеровских элементов их орбит и содержит некоторые другие параметры. Результаты измерений и принятая цифровая информация являются исходными данными для решения навигационной задачи по определению координат и параметров движения. Навигационная задача решается автоматически в вычислительном устройстве приёмника, при этом используется известный метод наименьших квадратов. В результате решения определяются три координаты местоположения потребителя, скорость его движения и осуществляется привязка шкалы времени потребителя к высокоточной шкале Универсального координированного времени (UTC).
ГЛОНАСС сегодня.
Сравнение ГЛОНАСС и GPS.

НЕДОСТАКИ GPS-СИСТЕМЫ.
Несмотря на все преимущества, у GPS-систем есть и недостатки. Например, GPS- приемник может быть отключен в любой момент, скажем, из соображений безопасности США. Кроме того, внедрение GPS- технологии подразумевает наличие подробных электронных карт c масштабом до 100 м, которые есть в свободной продаже не в каждой стране. Нельзя не упомянуть то обстоятельство, что при вычислении координат спутниковая система допускает погрешности. Природа этих ошибок различна. Основными источниками ошибок, влияющими на точность навигационных вычислений в GPS-системе, в частности, являются:
-погрешности, обусловленные режимом селективного доступа (Selective availability, S/A). Используя данный режим, Министерство Обороны США намеренно снижает точность определения местонахождения для гражданских лиц. В режиме S/A формируются ошибки искусственного происхождения, вносимые в сигнал на борту GPS-спутников с целью огрубления навигационных измерений. Такими ошибками являются неверные данные об орбите спутника и искажения показаний его часов за счет внесения добавочного псевдослучайного сигнала. Величина среднеквадратического отклонения из-за влияния этого фактора составляет, примерно, 30 м.
-погрешности, связанные с распространением радиоволн в тропосфере. Возникают при прохождении радиоволн через нижние слои атмосферы. Значения погрешностей этого вида при использовании сигналов с С/А- кодом не превышают 30 м.
-эфемеридная погрешность. Ошибки обусловлены расхождением между фактическим положением GPS-спутника и его расчетным положением, которое устанавливается по данным навигационного сигнала, передаваемого с борта спутника. Значение погрешности обычно не боее 3м.
- погрешность ухода шкалы времени спутника вызвана расхождением шкал времени различных спутников. Устраняется с помощью наземных станций слежения или за счет компенсации ухода шкалы времени в дифференциальном режиме определения местоположения.
- погрешность определения расстояния до спутника является статистическим показателем. Он вычисляется для конкретного спутника и заданного интервала времени. Ошибка не коррелированна с другими видами погрешностей. Ее величина обычно не превышает 10 м.
НЕДОСТАТКИ СИСТЕМЫ ГЛОНАСС:
-необходимость сдвига диапазона частот вправо, так как в настоящее время ГЛОНАСС мешает работе как подвижной спутниковой связи, так и радиоастрономии
-при смене эфемерид спутников, погрешности координат в обычном режиме увеличиваются на 25-30м, а в дифференциальном режиме - превышают 10 м;
-при коррекции набежавшей секунды нарушается непрерывность сигнала ГЛОНАСС. Это приводит к большим погрешностям определения координат места потребителя, что недопустимо для гражданской авиации;
-сложность пересчета данных систем ГЛОНАСС и GPS из-за отсутствия официально опубликованной матрицы перехода между используемыми системами координат.
Однако он был сорван из-за разногласий между правительствами стран ЕС и нежелания частных компаний инвестировать в Galileo. Консорциум частных компаний состоял из EADS, Thales, Inmarsat, Alcatel-Lucent, Finmeccanica, AENA, Hispasat и немецкой группы, включающей Deutsche Telekom и German Aerospace Centre.
В мае 2007 года консорциум вышел из проекта, и руководство Galileo взяла на себя Еврокомиссия. Сейчас из 30 планируемых спутников на орбите находится только один, второй планируется вывести на орбиту 27 апреля 2008 года.
На данный момент ЕС потратил на реализацию проекта около 1 млрд евро
Влияние ионосферы на характеристики трансионосферных радиосигналов
Электромагнитные волны, распространяющиеся через ионосферу, испытывают самые разнообразные возмущения. Основной характеристикой ионосферы, определяющей изменение параметров радиоволны, является интегральное (полное) электронное содержание I ( t ) или его производные (по времени и пространству) I ´ t ( t ), I′ x ( t ) и I′ y ( t ) вдоль пути распространения.
Изменения ПЭС можно условно разделить на регулярные и нерегулярные. Регулярные изменения (сезонные, суточные), по крайней мере, для магнитоспокойной среднеширотной ионосферы, описываются моделями, дающими относительные точности прогноза ПЭС до 50 - 80 %. Нерегулярные изменения (вариации) связаны с ионосферными неоднородностями различной природы, спектр которых носит степенной характер.
В результате проведенных в последнее время исследований стало ясно, что возмущения ионосферы во время магнитных бурь сказываются на деградации сигналов и сбоях системы GPS не только на экваторе и в полярной зоне, но даже на средних широтах. Однако вопрос о причинах и конкретных механизмах этого влияния остается в значительной степени открытым.
Основной задачей будущих исследований является изучение физических механизмов многомасштабных вариаций полного электронного содержания в ионосфере во время геомагнитных возмущений околоземного космического пространства, сопровождающихся деградацией сигналов и сбоями спутниковых радиотехнических систем. Эти исследования должны носить комплексный характер с максимальным привлечением ряда независимых экспериментальных средств мониторинга ионосферы (цифровые ионозонды, радары некогерентного рассеяния, ЛЧМ-ионозонды и т.д.).
Каждый полный набор данных включает ионосферную модель, которая используется в приемнике для аппроксимации задержки фазы сигнала при его прохождении через ионосферу при любом расположении спутников и в любой момент времени. Методы измерение дальности до спутника С помощью псевдослучайного кода. Псевдодальность – расстояние между антенной приемника и спутником измеренное с помощью псевдослучайного кода. Как говорилось раньше, эти расстояния необходимы для расчета координат. Процедура определения псевдодальности, может быть описана следующим образом.
Представим, что часы на спутнике и приемнике полностью синхронизированы друг с другом. Когда код PRN передается от спутника, приемник воспроизводит точную копию того же кода. После некоторое время, код переданный спутником будет принят приемником. Сравнивая переданный код и его точную копию, приемник может вычислить время нужное для того чтоб код достиг приемника. Умножение времени путешествия на скоростью света дает нам дальность между спутником и приемником . Измерения расстояния по коду К сожалению, предположение, что приемник и спутниковые часы полностью синхронизированы, не совсем верен. Этот метод вычисления дальности требовал бы очень точной синхронизации часов спутника и приемника. На спутники GPS стоят очень точные атомные часы, очень дорого обеспечить такими часами приемник, так как их цена может достигать 20 000 $.
Проблему синхронизации часов решают, рассматривая ошибку часов приемника как дополнительное неизвестное в навигационных уравнениях.
Расстояния между спутником и приемником - сумма общего количества полных циклов плюс дробный цикл между приемником и спутник, умноженный на длину волны несущей. Дальность, определенная с помощью фазы несущей, имеет намного большую точность чем дальность, полученная с помощью кода.
Есть, однако, одна проблема. Несущая это синусоидальная волна, что означает, что все циклы выглядят одинаково. Поэтому, приемник GPS не может отличить один цикл от другого. Другими словами, приемник, сразу при включении, не может определить общее количество полных циклов между спутником и приемником. Он может определить только дробную часть цикла (с точность не менее 2 мм), в то время как полное число циклов остается неизвестным, или неоднозначным.
К счастью, приемник может отслеживать изменение фазы, будучи включенным. Это означает, что начальная неопределенность решается с течением временем. Определение полного числа циклов несущей (длин волн) между антенной и спутником называется разрешением неоднозначности - поиском целого значения числа длин волн. Для измерений в режиме с постобработкой, который используется для определения местоположения с точностью на уровне сантиметра, это целое значение определяется во время обработки на компьютере. Для измерений в реальном времени, которые используются для определения местоположения с точностью на уровне сантиметра, это целое значение определяется в течение процесса называемого инициализацией.
Пропуск цикла сигнал - это скачок в целое число циклов в фазе несущей при измерении дальности. Пропадание сигнала может быть вызвано преградой между сигналом и спутником. Радиопомехи, ионосферное возмущение, и высокая динамика приемника - все это также может быть причинной пропадания сигнала. Так же проскальзывания цикла может произойти из-за сбоя приемника. Пропуск цикла может длиться в течение любого времени.
Вам необходимо знать координаты вашей базовой станции как можно точнее, так как точность получаемая в результате дифференциальной коррекции напрямую зависит от точности координат базовой станции. Существует два метода выполнения дифференциальной коррекции, в реальном времени и в постобработке
Шебшаевич В. С., Дмитриев П. П., Иванцев Н. В. и др. Сетевые спутниковые радионавигационные системы / Под ред. В. С. Шебшаевича. — 2-е изд., перераб. и доп. — М.: Радио и связь, 1993. — 408 с. — ISBN 5-256-00174-4
ИНТЕРФЕЙСНЫЙ КОНТРОЛЬНЫЙ ДОКУМЕНТ (редакция 5.0). КООРДИНАЦИОННЫЙ НАУЧНО-ИНФОРМАЦИОННЫЙ ЦЕНТР (2002). — официальное техническое описание параметров и сигнала ГЛОНАСС. Проверено 14 декабря 2009.
ИНТЕРФЕЙСНЫЙ КОНТРОЛЬНЫЙ ДОКУМЕНТ (редакция 5.1). РОССИЙСКИЙ НАУЧНО-ИССЛЕДОВАТЕЛЬСКИЙ ИНСТИТУТ КОСМИЧЕСКОГО ПРИБОРОСТРОЕНИЯ (2008). — официальное техническое описание параметров и сигнала ГЛОНАСС. Проверено 14 декабря 2009.
Замена традиционных средств измерений на электронные привела к появлению новых методов и технологий геодезиче¬ских работ. Спутниковые радионавигацион¬ные системы (СРНС) и геодезических приемников принципиально изме¬нило методику построения опорных геодезических сетей. Термин "GPS технологии" (или ГЛОНАСС/GPS технологии) применяется для способов определения координат с применением спутниковых радионавигационных систем– американской системы GPS и российской ГЛОНАСС. Каждая из этих СРНС при полном развертывании состоит из 24 спутников, вращающихся на орбитах с высотой около 20000 км. Спутники непрерывно передают сигналы, содержащие информацию об их положении и точном времени, а также дальномерные коды, позволяющие измерить расстояния.
Содержание
Введение. 2
Глава 1. Геодезические работы с использованием спутниковых систем. 4
1.1. Спутниковые радионавигационные системы 4
1.2Пространственная геоцентрическая система координат 6
1.3Геодезические приёмники 8
1.4Планирование и проведение измерений 13
1.5Обработка результатов спутниковых измерений 22
Заключение. 29
Список литературы 31
Прикрепленные файлы: 1 файл
курсачччч.docx
Глава 1. Геодезические работы с использованием спутниковых систем. 4
1.1. Спутниковые радионавигационные системы 4
1.2Пространственная геоцентрическая система координат 6
1.3Геодезические приёмники 8
1.4Планирование и проведение измерений 13
1.5Обработка результатов спутниковых измерений 22
Список литературы 31
Введение.
Традиционные методы геодезических измерений и графического отображения полученной информации на бумажных носителях остались в прошлом. Современное геодезическое обеспечение инженерно-строительных изысканий, проектирования и строительства различных объектов, а также инвентаризации, кадастра и оценки объектов недвижимости базируется на использовании принципиально новых геодезических приборов и технологий, геодезических информационных систем пространственных баз данных. Все полевые измерения и съёмки выполняются сейчас электронными приборами с автоматической регистрацией результатов, автоматизированы и все последующие процессы геодезического производства.
Замена традиционных средств измерений на электронные привела к появлению новых методов и технологий геодезических работ. Спутниковые радионавигационные системы (СРНС) и геодезических приемников принципиально изменило методику построения опорных геодезических сетей. Термин "GPS технологии" (или ГЛОНАСС/GPS технологии) применяется для способов определения координат с применением спутниковых радионавигационных систем– американской системы GPS и российской ГЛОНАСС. Каждая из этих СРНС при полном развертывании состоит из 24 спутников, вращающихся на орбитах с высотой около 20000 км. Спутники непрерывно передают сигналы, содержащие информацию об их положении и точном времени, а также дальномерные коды, позволяющие измерить расстояния.
Определение координат пользователя СРНС производится с помощью специальных спутниковых приемников, измеряющих либо время прохождения сигнала от нескольких спутников до приемника, либо фазу сигнала на несущей частоте. В первом случае расстояния измеряются с метровым уровнем точности, во втором случае – с миллиметровым уровнем точности. При этом реализован однонаправленный метод измерения расстояний, поскольку и GPS, и ГЛОНАСС являются беззапросными спутниковыми системами, допускающими одновременное использование их многими пользователями.
Каждый приемник может производить измерения либо независимо от других приемников, либо синхронно с другими приемниками. В первом случае, достигается точность однократного определения координат по кодам порядка 1-15 м. Такой способ идеально подходит для навигации любых перемещающихся объектов, от пешеходов до ракет. Однако более высокую точность можно получать при одновременных наблюдениях спутников несколькими приемниками по фазовым измерениям. При таком способе наблюдений один из приемников обычно располагается в пункте с известными координатами. Тогда положение остальных приемников можно определить относительно первого приемника с точностью нескольких миллиметров. При этом возможны измерения на расстояниях от нескольких метров до тысяч километров. Кроме определения местоположения границ земельного участка также необходимы кадастровый учет и государственная регистрация.
Принципиальным достоинством спутниковых методов позиционирования является возможность определения координат в любое время суток и в любой точке. Отпадает необходимость наличия прямой видимости между исходными и определяемыми пунктами. Это позволяет сократить сроки выполнения геодезических работ , снизилось влияние многих погрешностей, в том числе зависящих от исполнителя.
Глава 1. Геодезические работы с использованием спутниковых систем.
1.1. Спутниковые радионавигационные системы
Системы спутниковых определений координат первоначально развивались для навигационных целей и обеспечивали точность, не превышающую нескольких метров. Однако современные геодезические приёмники, методы математической обработки позволяют определять плановые координаты с погрешностями 5. 10 мм, высотные — 15. 30 мм и меньше. Их точность удовлетворяет требованиям построения опорных геодезических и межевых сетей, обеспечения кадастровых, землеустроительных, изыскательских и других инженерно-геодезических работ. При этом не требуется обеспечивать взаимную видимость между пунктами, строить над ними высокие сигналы, проводить комплекс точных угловых и линейных измерений. Спутниковые измерения выполняются в любых погодных условиях в течение нескольких минут, что существенно упростило производство полевых работ. Однако для наблюдения навигационных спутников (НС) небесный свод над приёмником должен быть достаточно свободен от застройки и растительности.
Структура, способы функционирования и требуемые характеристики подсистем СРНС во многом зависят от заданного качества навигационного обеспечения и выбранной концепции навигационных измерений. Для достижения таких важнейших качеств, как непрерывность и высокая точность навигационных определений, в глобальной рабочей зоне в составе со временной СРНС типа ГЛОНАСС(глобальная навигационная спутниковая система Р.Ф) и GPS(США) функционируют три основные под системы космических аппаратов (ПКА), состоящая из навигационных спутников (НС):космическим сегментом; контроля и управления ;сегмент потребителей СРНС(аппаратура потребителя) . Разнообразие видов приемоиндикаторов СРНС обеспечивает потребности наземных, морских, авиационных и космических (в пределах ближнего космоса) потребителей.
Основной операцией, выполняемой в СРНС с помощью этих сегментов, является определение пространственных координат местоположения потребителей и времени, т. е. пространственно-временных координат (ПВК). Эту операцию осуществляют в соответствии с концепцией независимой навигации, предусматривающей вычисление искомых навигационных параметров непосредственно в аппаратуре потребителя. В рамках этой концепции в СРНС выбран позиционный способ определения местоположения потребителей на основе пассивных дальномерных измерений по сигналам нескольких навигационных искусственных спутников Земли с известны микоординатами .
Высокая точность определения местоположения потребителей обусловлена многими факторами, включая взаимное расположение спутников и пара метры их навигационных сигналов. Структура космического сегмента обеспечивает для потребителя постоянную видимость требуемого числа спутников.
Рис.1 Спутник ГЛОНАССА
1.2Пространственная геоцентрическая система координат
Если за начало координат принят центр общего земного эллипсоида (центр масс Земли), а ось Z совмещена с осью вращения Земли, то такую систему называют Геоцентрической. Она применяется при решении геодезических задач, связанных с обширными частями земной поверхности или со всей фигурой Земли (например, в космической геодезии).
В системе геоцентрических координат положение точки A на поверхности эллипсоида определяют геодезической долготой L и геоцентрической широтой Ф, равной углу между радиус-вектором с и плоскостью экватора
В геоцентрической системе пространственные прямоугольные и эллипсоидальные координаты связаны соотношениями:
X=pcosῳ cosL; Y=pcosῳsinL; Z=psinῳ , где р=R+h; R-средний радиус земли; h-высота пункта над поверхностью элиппсоида ;
ῳ-геоцентрическая высота; L- геодезическая долгота. При решении некоторых задач на поверхности эллипсоида вместо геодезической
широты B или геоцентрической широты удобно использовать приведенную широту U, оставляя в качестве второй координаты геодезическую долготу L :
Из центра меридианного эллипса EPE1P1 проведена окружность EP’E1P’1 радиусом , равным большой полуоси А. точка А´ получена пересечением окружности линией АА1, параллельной малой оси эллипса РР1, АС-нормаль к поверхности эллипсоида в точке А . Тогда приведенная широта U определяется как угол , составленный радиусом – вектора ОА´ с плоскостью экватора. Геодезическая , приведенная и геоцентрическая широты связаны между собой простыми соотношениями : tgB=tgU=tgῳ
1.3Геодезические приёмники
Для определения координат точек местности с точностью, удовлетворяющей геодезическим требованиям, применяются специальные геодезические приёмники. Такие приёмники осуществляют захват сигнала от навигационных спутников, измеряют по фазе несущей частоты псевдодальность, по ней и по дополнительно полученной информации вычисляются координаты.
В геодезии используются фазовые приёмники, так как в настоящее время только они обеспечивают миллиметровую и сантиметровую точность позицирования. Наряду с фазовыми существуют кодовые приёмники, работающие по Р- и С/А-кодам, они широко распространены в навигации, но в геодезии имеют ограниченное применение. Следует отметить, что современные геодезические приёмники измерения ведут по фазе и дополнительно по кодам сигнала, ускоряя тем самым процесс позицирования.
Приёмники подразделяют на двухсистемные, работающие по спутникам ГЛОНАСС/ GPS одновременно или раздельно, и односистемные, работающие только по НС одной системы. В настоящее время наиболее распространены в геодезии односистемные GPS -приёмники. Вместе с тем в РФ с 2003 года начат выпуск двухсистемного приемника ГЕО-161, имеющего ряд преимуществ, к двухсистемным относятся также приёмники типа Lеgасу-Е-2484 и другие. С развитием систем ГЛОНАСС, GPS, GALILEO многосистемные приёмники в геодезических работах станут более перспективными.
Кроме того, геодезические приёмники подразделяют на одно- и двухчастотные, одно- и многоканальные. В одночастных измерения псевдодальности выполняются по одной частоте сигнала, а в двухчастотных — на частотах L1 и L2 одновременно. Двухчастотные приёмники требуют меньше времени на инициализацию и позицирование, обеспечивают высокую точность. К двухчастотным приёмникам относятся Тrіmblе 4000851, Тrimblе 5700, Тrimble 5800, 2-МАХ и другие.
Одноканальные приемники захват сигналов осуществляют последовательно по каждому НС. Многоканальные одновременно отслеживают и принимают сигналы от созвездия спутников, включающего до 8— 12 НС. В настоящее время выпускаются, в основном, многоканальные приемники, которые имеют дополнительные каналы приема сигналов от геостационарных спутников.
а ) Сигнал НС б) Сигнал НС
Рис. 4 а) режим постобработки; 6) режим реального времени;
3 — генератор опорного сигнала;
5— блок первичной обработки;
7 - контроллер с ПО режима КТК;
8 — блок связи с базовой станцией
На рисунке 4 представлены две блок-схемы приёмников, которые различаются применяемым режимом обработки результатов измерений. Если приёмник работает в режиме постобработки, то результаты измерений заносятся в блок памяти приёмника, а по завершении наблюдений передаются в компьютер для постобработки. Для передачи в компьютер приёмник имеет специальные порты подключения и кабель. При полевых работах можно к приёмнику подключить контроллер, с клавиатуры которого вносится информация о пунктах, особенностях наблюдений, высоте антенны.
Если приёмник работает в режиме реального времени, то подключение контроллера обязательно. Кроме того, приёмник должен иметь блок связи, по которому передаётся необходимая для обработки информация с базового пункта на определяемый. Контроллер должен быть оснащён программным обеспечением обработки в режиме РТК. Для связи используют специальные радиомодемы (например, Тrimmark, Trimble) или каналы мобильной связи.
В настоящее время геодезические приёмники выпускаются разных конструкций. В ряде приборов антенный блок.
Определен от приемника , применяются легкие антенны , которые устанава-ются на раздвижной вехе и могут быть вынесены над закрывающими небосвод объектами. К таким приёмникам относятся Тrimble5700, Тhales 6500, РгоМаrк-2 и другие. В других приборах (Тrimble 4600STRATUS Sоkkіа) антенна и приёмник объединены в одном корпусе, куда вставляются также элементы питания. Такие приёмники имеют только панель управления, состоящую из клавиши включения и небольшого табло. Наиболее информативна панель управления приёмников Stratus, которая позволяет контролировать автоматически протекающий процесс измерений .
В геодезических приёмниках применяются специальные конструкции антенн с высокой стабильностью фазового центра, чувствительные к GPS сигналам. Для подавления многолучёвости от местных предметов антенны имеют отражающее устройство, применяются микрополосковые конструкции. Такие антенны с высокой стабильностью фазового центра и подавлением влияния многолучёвости могут обеспечивать миллиметровую точность определения координат.
В качестве источников питания используются компактные литиево-ионные аккумуляторы(Stratus) или элементы типа АА(Тrimble 4600). Геодезические приёмники устанавливаются над точкой на штатив) или на вехе с круглым уровнем . При установке на вехе применяется бипод, который делает положение вехи и приемника устойчивым .
Сельскохозяйственное изучение территории – одно из эффективных направлений использования космической информации. Круг вопросов, решение которых возможно по космическим снимкам, включает как задачи оперативного получения информации о составе и состоянии сельскохозяйственных культур, потенциальной урожайности, болезнях и повреждениях посевов вредителями и т. д., так и задачи инвентаризации земельных ресурсов, оценки биомассы, изучения динамики сельскохозяйственного использования земель. [5].
Достоинство дистанционных материалов – однородность и сравнимость на обширные территории, большая обзорность, современность и перманентность – являются решающими для вышеназванных задач.
В реферате была предпринята попытка широко осветить тему, показав как принципы, заложенные в системы комического мониторинга сельскохозяйственных культур так и их конкретные реализации.
Сельскохозяйственные задачи, решаемые с помощью данных дистанционного зондирования
Системы космического мониторинга сельскохозяйственных угодий в большинстве случаев основаны на вегетационном индексе растительности, который позволяет отслеживать динамику развития сельскохозяйственных культур [13].
Отклонение вегетационного индекса от нормы сообщает о диспропорциях в развитии сельскохозяйственных культур, что свидетельствует о необходимости дополнительных сельскохозяйственных работ на этих участках. Это могут быть проблемы с поливом, большое количество сорняков, повреждение растений вредителями и др.
Пользователями технологий космического мониторинга сельскохозяйственных угодий являются [13]
· агрономы и сельское хозяйство (контроль с/х посевов, прогнозирование урожайности, оптимизация управленческих решений);
· владельцы бизнеса (оценка бизнес-перспектив, принятие разумных решений по капитальным вложениям и другим управленческим решениям);
· инвесторы и инвестиционные аналитики (оценка инвестиционного потенциала, помощь в принятия инвестиционных решений, обеспечение надежности прогнозов);
· страховые брокеры (проверка обращений клиентов, установление шкалы ставок и страховых премий, определение суммы выплат);
· сельскохозяйственные производители техники (интеграция решений в системы сельскохозяйственной техники);
· государственные и отраслевые организации, занимающиеся сельским хозяйством, продовольственной безопасностью и экологическими проблемами.
Кроме того данные космической съемки применяются для прогноза точной погоды на поле, что позволяет спланировать сельскохозяйственные работы [16]. Данные в микроволновом диапазоне позволяют оценивать температуру почвы, влажность с низким пространственным разрешением (километры). Также вегетационный индекс может служить в качестве раннего индикатора урожайности (рис. 1), что поможет фермерам принять правильные маркетинговые решения.
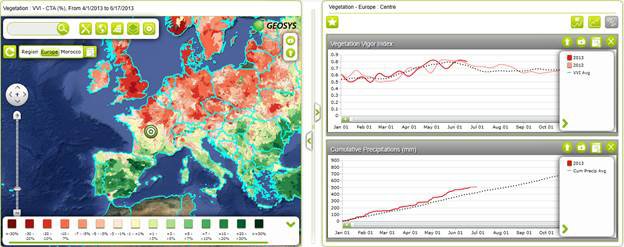
Рис. 1. Сравнение хода вегетационного индекса в 2013 и 2012 г. [17]
Использование вегетационных индексов
Для характеристики растительного покрова используют различные вегетационные индексы (VI, NDVI, EVI), которые получают на основе анализа спектральной яркости в красной и ближней инфракрасной зонах [6].
Основное предположение по использованию вегетационных индексов состоит в том, что некоторые математические операции с разными каналами ДЗЗ могут дать полезную информацию о растительности. Это подтверждается множеством эмпирических данных. Второе предположение - это идея, что открытая почва на снимке будет формировать в спектральном пространстве прямую линию (почвенная линия). Почти все распространенные вегетационные индексы используют только соотношение красного – ближнего инфракрасного каналов, предполагая, что в ближней инфракрасной области лежит линия открытой почвы. Подразумевается, что эта линия означает нулевое количество растительности.
Первым индексом растительности (1972 г.) на основе отражения был индекс коэффициентов отражения (RatioVI, RVI), который рассчитываеся как [6]
В 1974 г. этот индекс был улучшен и назван как разностный нормализованный вегетационный индекс растительности (NDVI).
Индекс может принимать значения от -1 до 1. На рис. 2 приведены карты NDVIс различной детальностью.
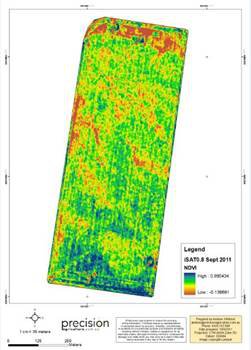
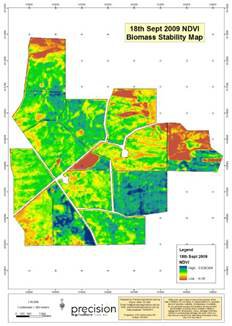
Рис. 2. Продукты iSAT0.8 м и iSAT 30 м. Первый хорошо подходит для оценки микровариаций в состоянии сельскохозяйственных культур, второй подходит для более мелкомасштабного зонирования [18]
Поскольку индексы RVIи NDVI не избавлены от влияния отражения света от почвы, в 1977 г. был предложен индекс растительности, основанный на понятии линии почвы, названный перпендикулярным индексом растительности (Perpendicular Vegetation Index –PVI), который определяется как ортогональное (перпендикулярное) расстояние между точкой, представляющей растительность на поле и линией почвы.
![]()
Индекс PVI имеет следующий диапазон значений:
Почвенный вегетационный индекс (Soil Adjusted VI, SAVI)
![]()
L=0 для наибольшего индекса облиствения
L=1 для наименьшего, оптимальное значение L=0,5
Вегетационный индекс устойчивый к влиянию атмосферы (AtmosphericallyResistant VI, ARVI)
Как правило, a=1. При малом покрытии растительности и неизвестном типе атмосферы a=0,5.
Для определенных индексов существуют свои пороги чувствительности к разреженности растительности
Специально для MODIS на основе NDVI разработан индекс нового поколения EVI (Enhanced Vegetation Index –улучшенный вегетационный индекс): [14]
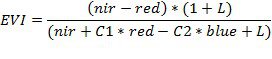
где nir, red, blue –скорректированные за атмосферу (по данным съёмки MODIS) значения отражательной способности в ближней инфракрасной, красной и голубой зоне (0.841-0.876, 0.620- 0.670 0.459 - 0.479 мкм); L – поправочный коэффициент, учитывающий влияние почвы; С1, С2 –коэффициенты, контролирующие вклад голубой зоны в коррекцию красной за рассеяние атмосферными аэрозолями. Новый индекс позволяет выделить больше градаций в районах с высокой зелёной биомассой и имеет преимущества для мониторинга растительности, поскольку влияние почвы и атмосферы в значениях EVI минимизировано.
В статье [12] выполнено исследование с целью определить, какие спектральные каналы наиболее подходят для характеристики отдельных биофизических параметров сельскохозяйственных посевов. Были проведены спектральные измерения отражательной способности хлопка, картофеля, сои, кукурузы и подсолнечника. Рассматриваемые характеристики включали биомассу, листовой индекс, высоту растения.
Установлено, что наиболее сильная взаимосвязь с характеристиками посевов наблюдалась в узких диапазонах красного (650-700 нм), зеленого (500-550 нм) и ближнего инфракрасного (900-940 нм). Центр чувствительности к влажности расположен в 982 нм.
Прогноз урожайности
Прогнозная оценка урожайности текущего сезона строится на основе сравнения с релевантными параметрами прошлых лет (NDVI, температура, осадки, солнечная радиация) и исторических данных по урожайности, полученных из статистических источников. [8]
В статье [9] освещен прогноз урожая риса с использованием радиолокационной информации.
Точная и своевременная информация о росте риса и прогнозе его урожайности помогает правительствам и другие заинтересованным сторонам проводить экономическую политику, предвидеть и координировать усилия по оказанию помощи в случае природной катастрофы, и обеспечивает основу для страхового решение оценки рисков потери урожая из риса. Это стало возможным благодаря использованию радиолокатора с синтезированной апертурой в сочетании с технологиями моделирования урожая.
Технология прогноза урожая риса включает два ключевых модуля: MAPscale-Rice и ORYZA2000. Первый позволяет преобразовать спутниковые радиолокационные данные в такие продукты как площадь под рисом, начало сезона, фенологическая фаза, листовой индекс LAI. Второй модуль позволяет по этим данным получать непосредственно оценку урожая.
Индекс листовой поверхности (leaf area index, LAI) определяется как общее покрытие земельного участка одной стороной поверхности листьев. LAI сильно связан с такими процессами как суммарное испарение, затенение почвы, фотосинтез, опад листьев и др. Полученное с помощью ДДЗ значение LAI позволяет моделировать эти процессы. LAI очень важен для оценки урожайности. Для зерновых приводится следующее соотношение
Урожай (кг/га)=1571,2*ln(LAI)+2033,6 [7]
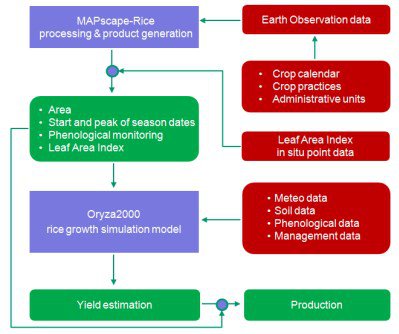
Рис. 3. Схема обработки данных для оценки урожая
В среднем достигнутая точность прогнозных данных по сравнению с фактическими составила 85% или 702 кг/га.
Применение моделей биологической продуктивности растений в сочетании с космическими радиолокационными снимками среднего пространственного разрешения позволяет достоверно оценивать валовые сборы основных зерновых культур на региональном уровне в Западной Сибири [2].
Определение состава сельскохозяйственных культур
Дешифрирования сельскохозяйственных угодий имеет свои особенности. Одним из основных свойств сельскохозяйственных объектов является их быстрая сезонная физиономическая изменчивость. Каждое растение в течение вегетационного периода проходит несколько фаз развития. Фенологическое развитие сельскохозяйственных культур приводит к существенным изменениям их отражательной способности. Ход её изменения у разных растений различен и является надежным дешифровочным признаком. Поэтому применение снимков, полученных в разные сроки, позволяет разделить культуры, физиономически сходные на одинаковой стадии развития (и поэтому не разделяющиеся на одном снимке), но имеющие разные сроки прохождения фаз развития.
Для разделения культур на группы, играющие различную роль в севооборотах (непропашные колосовые, пропашные, многолетние травы и т. д.) необходимо проведение съемки несколько раз в период вегетации: весной, летом, осенью. Ранние осенние снимки позволяют убранные озимые и яровые зерновые колосовые отделить от пропашных, находящихся ещё в различных фазах вегетации. Сочетание весенних и осенних снимков дает возможность определить долю чистых паров, ранневесенние снимки – разделить озимые и яровые культуры. Чистые пары на летних снимках любого срока изображаются как голая почва. [5].
Занятые пары на весенних и раннелетних снимках изображаются также, как и поля под сельскохозяйственными культурами, а за месяц до посева озимых культур их распахивают и они изображаются на позднелетних снимках как обнаженная почва. На осенних снимках на них видны восходы озимых культур. Поля под зяблевой вспашкой на позднелетних и осенних снимках изображаются как голая почва.
Чтобы определить состав сельскохозяйственных культур обычно проводят классификацию [10]. Она может быть контролируемой, то есть с обучающей выборкой или неконтролируемой без неё. Методы классификации зависят от данных. Разработаны специальные методы для упрощения многозональных снимков, классификации гиперспектральных снимков, полнополяризационных радиолокационных данных. Используют даже марковские модели.
Использование радиолокационных данных
Преимущества съёмки в радиодиапазоне заключаются в возможности проводить исследования в условиях облачности, независимо от условий освещенности. Радиолокационные данные хорошо использовать для оценки состояния посевов и влажности почв.
В статье [8] показано использование данных SIR-Cи AIRSAR для оценки возможности радиолокационного зондирования для выделения различных видов растительности и оценки биомассы. Результаты показали, что комбинация Lи P диапазонов позволяет отличать сельскохозяйственные поля от других видов земель, а комбинация Lи C позволяет производить классификацию внутри сельскохозяйственных участков.
При оценке биомассы диапазон Pдает лучший результат для лесов и кустарников, L–для сельскохозяйственных культур с низкой плотностью, Lи C –для сельскохозяйственных культур с высокой плотностью.
В другой статье [11] приводится исследование корреляции данных в видимом, ближнем инфракрасном и микроволновом диапазоне с различными характеристиками сельскохозяйственных культур. Проводились полевые работы по определению влажности почвы, общего объема биомассы и высоты растений. Результаты показали, что использование радиолокационных данных в диапазонах C, L, Pвместе с оптическими улучшает классификацию по сравнению с использованием данных только в оптическом диапазоне. Оказалось, что радиолокационное зондирование позволяет лучше определять различие в высоте растений, чем биомассу. K диапазон и Cдиапазон чувствительны к вариациям высот небольших растений, в то время как Pдиапазон позволяет различать высокие и низкие растения.
Статья [2] посвящена дешифрированию типов сельскохозяйственных культур на юге Западной Сибири. Цветовой RGB синтез из снимков, выполненных в июне, июле и августе на одну и ту же территорию позволяет визуально разделять следующие культуры: подсолнечник, пшеница, кукуруза, просо. Не разделяются пшеница и овес, что связано с совпадением фенофаз развития культур. При включении в цветовой синтез снимков за май и сентябрь достоверно выделяются паровые поля, стерняи естественная нераспаханная степь, используемая под пастбище.
В статье [3] также приводится опыт дешифрирования сельскохозяйственнух культур по радиолокационным снимкам. В конце июня хорошо разделяются яровые культуры от озимых, а также озимая рожь от озимой пшеницы, кроме того, выделяются необрабатываемые земли и чистый пар;
Обзор сервисов космического мониторинга – Cropio, Вега
На основе интернет-источника [15] был составлена таблица, где сравниваются популярные системы спутникового мониторинга с/х угодий. На рис. 4. приведен интерфейс одного из сервисов.
Читайте также: