
История развития теории механизмов и машин реферат
Обновлено: 03.07.2024
Опорный конспект лекций дисциплины составлен с целью предоставления помощи преподавателям при подготовке к лекционным занятиям и самостоятельного изучения дисциплины курсантами при подготовке к текущему, модульному контролю знаний и экзаменам. Согласно рабочей программе конспект лекций включает в себя два раздела.
В курсе теории механизмов и машин широко используется современный математический аппарат, и изучаются как аналитические, так и графические приемы решения задач анализа и синтеза механизмов.
В этом разделе раскрывается также основы классификации и выбора механических передач, критерии работоспособности и основы расчета фрикционных, ременных, цепных, зубчатых и червячных передач, а также расчета валов, подшипников, муфт и соединений деталей машин.
Раздел 1. Теория механизмов и машин
Лекция № 1. Структура механизмов
План
2. Основные понятия и определения.
3. Классификация кинематических пар. Степень свободы.
4. Структурный анализ механизмов.
Краткий исторический обзор развития ТММ
Простейшие механизмы (рычажные, зубчатые и др.) были известны с давних времен. Постепенно шел процесс их исследования, совершенствования и внедрения в практику с целью облегчения труда человека и повышения производительности труда.
Так в 15 веке Леонардо да Винчи разработал проекты конструкции механизмов ткацких станков, печатных и деревообрабатывающих машин.
Математик и механик А. Эйлер (1707-1783), автор 850 научных трудов, исследовал колебания и устойчивость упругих тел, а также профили зубьев зубчатых колес, и пришел к выводу о том, что наиболее перспективным является эвольвентный профиль.
Русский механик и изобретатель И. И. Ползунов (1720-1766) впервые разработал проект механизма двухцилиндрового парового двигателя, сконструировал автоматический регулятор питания котла водой и т.д.
Механик И. И. Кулибин(1735-1818) создал знаменитые часы в форме яйца, представляющего собой сложнейший по тем временам механизм автоматического действия.
Знаменитый русский ученый П. Л. Чебышев (1821-1894) опубликовал 15 работ по структуре и синтезу рычажных механизмов, изобрел свыше 40 различных новых механизмов. Структурная формула плоских механизмов называется сейчас формулой Чебышева.
Значительный вклад в динамику машин внес отец русской авиации Н. Е. Жуковский (1847-1921). Он был не только основоположником современной аэродинамики, но и автором целого ряда работ по прикладной механике и теории регулирования хода машин.
Существенный вклад в становление механики внес И. И. Артоболевский (1905-1977). Он является организатором школы теории механизмов и машин. Им написаны многочисленные труды по структуре, кинематике и синтезу механизмов, динамике машин и теории машин-автоматов, а также учебники, получившие всеобщее признание.
В 30-е года и последующие годы большой вклад в теорию механизмов и машин внесли своими исследованиями М. Т. Бруевич− один из создателей теории точности механизмов, Г. Г. Баранов (1899-1968) − автор трудов по кинематике пространственных механизмов, С. Н. Кожевников, разработавший общее методы динамического анализа механизмов с упругими звеньями и механизмов тяжело нагруженных машин.
2. Основные понятия и определения
Теория механизмов и машин − это наука, изучающая строение кинематику и динамику механизмов методом их анализа и синтеза .
Анализ− это исследование структурных, кинематических и динамических свойств механизмов.
Синтез− это проектирование механизмов с заданными структурными кинематическими и динамическими свойствами.
Всякий механизм состоит из деталей. Подвижные детали называются звеньями, неподвижные – стойками.
Таким образом, в любом механизме имеются одно неподвижное звено и одно или несколько подвижных звеньев.
Подвижное соединение двух соприкасающихся звеньев называется кинематической парой.
Совокупность поверхностей, линей и точек звена, входящих в соприкосновение с другим звеном пары, называют элементом пары.
Система звеньев, связанных между собой кинематическими парами, называется кинематической цепью.
Кинематическая цепь взаимосвязанных подвижных звеньев, в состав которой входит неподвижное звено (стойка), предназначенная для преобразования заданных движений одного или нескольких звеньев в требуемое движение других звеньев называется механизмом.
На относительное движение каждого звена кинематической пары могут накладываться ограничения, зависимые от способа соединения звеньев пары. Эти ограничения называют условиями связи или связями.
Свободно движущееся в пространстве твердое тело имеет 6 степеней (Н) свободы (рисунок 1.1). Число связей (S), которое можно наложить на относительное движение каждого звена кинематической пары может быть не более 5, иначе звенья станут неподвижными, т.е.

Рисунок 1.1 - Степени свободы тел в пространстве
Следовательно, число степеней свободы (Н) звена кинематической пары может быть равно H=6-S, т.е. 1 ≤ Н ≤ 5, (1.2)
Классификация кинематических пар и цепей
Кинематические пары могут быть:
поступательными и вращательными,
низшими и высшими,
одноподвижными и многоподвижными (I….V класса).
Поступательныминазывается пары, допускающие только поступательное движение звеньев, вращательными – пары, допускающие только вращательное движение вокруг некоторой оси.
К низшим парам относятся пары, у которых звенья касаются между собой по всей поверхности. К ним относятся поступательные и вращательные кинематические пары.
К высшим относятся пары, звенья которых соприкасаются друг другом в точке или по линии. К ним относятся фрикционные, кулачковые зубчатые, храповые и мальтийские пары.
В зависимости от числа условий связи, все кинематические пары делятся на классы. Они могут быть:
- пятиподвижными (сферич.), S=1, I класс,
- четырехподвижными (цилиндр), S=2, II класс,
- трехподвижными (сферич.), S=3, III класс,
- двухподвижными (цилиндр), S=4, IV класс,
- одноподвижная (поступат. и вращат.), S=5, V класс.
При нулевой степени свободы кинематической цепи ни одно из звеньев не может двигаться относительно неподвижного звена (стойки) и кинематическая цепь превращается в ферму.
Кинематические цепи могут быть простымии сложными.
У простой кинематической цепи каждое звено входит не более чем в две кинематические пары, у сложной пары каждое звено входит более чем в 2 кинематические пары (рисунок 1.2).

Простая КП Сложные КП
Рисунок 1.2 − Виды кинематических цепей
Простые и сложные кинематические цепи, в свою очередь, делятся на незамкнутые и замкнутые (рисунок 1.3) .
Рисунок 1.3 − Кинематические цепи
а − простая (незамкнутая); б – сложная незамкнутая; в – простая замкнутая;
1, 2,….6 – звенья; А, В, …. L − кинематические пары.
Число степеней свободы кинематической пары относительно неподвижного звена называется подвижностьюкинематической цепи(механизма).
Подвижность пространственной цепи (механизма) определяется по формуле Сомова-Малышева
W=6n-5p5-4p4-3p3-2p2-p1, (1.3) где n-число подвижных звеньев,
p1…p5 – число пар I…V классов.
Подвижность плоского механизма уменьшается на 3 и рассчитывается по формуле Чебышева
W=3n - 2p5 - p4 (1.4)
При изучении структуры и кинематики плоских механизмов во многих случаях удобно заменять высшие пары механизмов низшими. При этом подвижность механизма не должна изменяться. Полученный механизм называется заменяющим (рисунок 1.4)
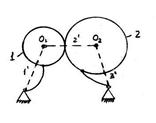
Рисунок 1.4 − Схема механизма с высшей парой
Представляемый подвижными звеньями 1,2 фрикционный механизм состоит из высшей кинематической пары 1,2 IV класса и двух низших пар 01 и 02 V класса и стойки, т.е. n=2, P5=2, P4=1. Подвижность такого механизма составляет
W=3n - 2p - p4=3 ·2 –2 ·2 -1=1, (1.5)
Заменяющий механизмпредставлен подвижными звеньями 1´2´3´ и стойками 0. Кинематические пары 01´; 1´,2´ 2´3´, 3´0 является вращательными парами пятого класса. Имеем n=3, p5=4, и p4=0
Тогда подвижность заменяющего механизма будет равна
W=3n - 2p5 - p4=3 ·3 –2 ·4 - 0=1, (1.6)
Таким образом, после замены высшей пары низшей подвижность механизма не изменилась, следовательно, замена выполнена правильно.
В статье идет речь о развитие науки о механизмах — теории механизмов и машин (ТММ). Выделены четыре основных этапа развития научной дисциплины, приводятся ученые, внесшие значительный вклад в развитие ТММ.
Ключевые слова
Текст научной работы
Наука теория механизмов и машин как научная дисциплина занимается изучением вопросов, связанных с рассмотрением особенностей строения, структуры, кинематики и динамики типовых механизмов. Свои истоки научная дисциплина берет в 15 — 16 веках. Научная дисциплина развивается экспоненциально. За относительно небольшой для человечества промежуток времени в пять столетий примитивные механизмы, разработанные инженерами того времени превратились в сложные системы, которые окружают нас повсеместно. С развитием общества и роста численности населения земли люди вынуждены были искать способы повышения производительности труда. К таким способам можно отнести развитие технических средств, применяемых человеком в производственных процессах. В настоящее время разработанные человеком механизмы, являющимися неотъемлемыми частями разнообразных машин эксплуатируются на земле, на воде и даже в космосе.
В данной работе хотелось бы вспомнить о тех ученых, которые внесли весомый вклад в развитие и совершенствование механизмов. В учебниках мы можем встретить информацию о том, что историю развития науки теории механизмов и машин можно условно разделить на четыре периода. Рассмотрим эти четыре периода.
1-й период. Этот период развития науки ТММ, период эмпирического развития науки о механизмах, относится к периоду 15 — 19 веков. В это время изобретается большое количество простых машин и механизмов. Это всевозможные подъемники, мельницы, камнедробилки, ткацкие и токарные станки, паровые машины. Ученые, инженеры того времени, внесшие вклад в развитие науки — Леонардо да Винчи (рис. 1), Ползунов, Уатт.

Рисунок 1. Леонардо да Винчи 1452 — 1519 гг.
2-й период. Этот период принято считать от начала до середины XIX века. В это время начинается развитие теории механизмов и машин именно как науки. Появляются такие раздела теории механизмов и машин, как кинематическая геометрия механизмов, автора Савари (рис. 2), предлагается теоретическое описание кинетостатики под авторством ученого Кариолиса, впервые производится расчет маховика. Разрабатываются и издаются научные труды по механике машин и механизмов, из издательств выходят первые учебники, автором которых стал российский ученый Чижов.

Рисунок 2. Анн Жан Мари Рене Савари 1774 — 1833 гг.
3-й период. Этот период берет свое начало во второй половине XIX века и заканчивается в начале XX века. Данные период в литературе нередко называют периодом фундаментального развития ТММ. К основным достижениям ученых этого периода можно отнести разработку основ структурной теории российским ученым Чебышевым (рис. 3), основы теории регулирования машин, основы теории гидродинамической смазки, основы аналитической теории зацепления, структурная классификация и структурный анализ ученого Ассура, разработанный Мором метод планов скоростей и ускорений.

Рисунок 3. Пафну́тий Льво́вич Чебышев 1821 — 1894 гг.
Ну и, наконец, 4-й период. Этот период относится к нашему времени. Называют этот период, периодом бурного развития большинства научных направлений и разделов теории механизмов и машин не только в нашей стране, но за границей. Своими работами вклад в развитие науки внесли Российские ученые Артоболевский И.И. (рис. 4), Литвин Ф.Л. и Фролов К.В.

Рисунок 4. Иван Иванович Артоболевский 1905 — 1977гг.
В заключении хотелось бы отметить, что Российские ученые внесли существенный вклад в развитие науки ТММ в мире.
Цитировать
Всемирные промышленные выставки, организованные в 60—80-х годах XIX века продемонстрировали заметный прогресс мирового машиностроения. Число машин в различных областях производства из года в год увеличивалось. Возрастали и потребности создателей машин в научном осмыслении и обосновании опыта проектирования машин, в разработке методов их расчета и изготовления.
Механика машин, бывшая до середины XIX в. в основном наукой описательной, начинает пользоваться аналитическими, графическими и экспериментальными методами исследований. Происходит первоначальная дифференциация теории машин: из нее выделяются описательное машиноведение, теория паровой машины, некоторые ответвления науки о машинах различных производств, в частности о транспортных машинах; к концу столетия оформляется в самостоятельное научное направление учение о деталях машин.
Усложняется и расчленяется теория механизмов, выделяются кинематика механизмов, кинематическая геометрия: самостоятельное значение получает теория шарнирных механизмов, начинает разрабатываться учение о структуре механизмов. В связи с растущим применением передач в машинах развивается теория зубчатых зацеплений, появляются приближенные методы расчета ременных и цепных передач. В динамике машин к началу XX в. самостоятельное значение приобретают теория трения и теория автоматического регулирования.
В ходе развития машинного производства теория машин и механизмов становилась все более важным, а в некоторых случаях определяющим фактором технического прогресса машиностроения. Значительная роль принадлежала тем широким научным поискам и многочисленным исследованиям, которые были начаты в последней трети XIX в. и развиты в первые десятилетия XX в.
1 НЕМЕЦКАЯ ШКОЛА МАШИНОВЕДЕНИЯ
Роберт Виллис родился 27 февраля 1800 г. в Лондоне в семье врача, учился в Кембриджском университете, по окончании которого сперва занялся естествознанием, а затем философией, прикладной механикой и архитектурой. С 1829 г. он преподавал в Кембриджском университете, в 1832 г. получил Джексоновскую кафедру (Jacksonian professor). В 1832 г. Виллис был избран членом Королевского общества, а в 1833 г.— действительным членом Британской ассоциации наук.
Рассматривая системы классификации механизмов, созданные до него, Виллис ставит в упрек школе Монжа то, что предложенная ею система пригодна лишь для перечисления и описания элементов машин, но ничего не дает для вычисления параметров их движения. По мнению Виллиса, систематика Борньи лучше приспособлена для описания механизмов, чем систематика школы Монжа, но также ничего не дает при исследовании законов движения отдельных механизмов. Кинематика же должна быть не описательной наукой, а расчетной.
На этом основании Виллис предлагает уточнить основное положение учения о механизмах и рассматривать их не как приспособления, служащие для преобразования движения, а как систему жестких звеньев, с помощью которой можно выполнить передачу и преобразование движения и которая зависит исключительно от конструкции этой системы. Тем самым Виллис связывает движение с геометрией механизма, исключает действие иных механизмов и рассматривает механизм как замкнутый и себе объект.
Исходя из этого, Виллис основывает свою классификацию на следующих принципах.
1. Отношение скоростей. Если скорости ведущего и ведомого звеньев механизма зависят от соответствующих сил, то отношение их от сил уже не зависит. Принимается, что отношение скоростей может быть постоянным или переменным.
2. Элементарная форма механизма. Виллис распределяет все механизмы на четыре группы: механизмы с перекатывающимися звеньями, механизмы со взаимно скользящими звеньями, шарнирные механизмы, передачи гибкими звеньями. Несколько позже Виллис добавил пятую группу – сдвоенные звенья.
Простыми механизмами, по Виллису, являются такие, которые имеют по два или три подвижных звена. Он подразделяет их на классы: к классу А относятся механизмы, у которых соотношение скоростей ведущего и ведомого звеньев сохраняют постоянную величину и знак для всего времени движения механизма; к классу В относятся механизмы с отношением скоростей, переменным по величине, но постоянным по знаку; наконец, класс С заключает в себе механизмы, у которых отношение скоростей постоянно, но отношение направлений переменно.
Дальнейшее подразделение классов на группы Виллис производит, исходя из способа передачи движения: 1) при помощи взаимного перекатывания поверхностей; 2) при помощи взаимного скольжения поверхностей; 3) при помощи гибкого звена; 4) шарнирными механизмами; 5) при помощи сдваивания звеньев. Далее Виллис рассматривает сложные механизмы. Он подразделяет их на два класса, исходя из принципа сложения скоростей и сложения перемещений.
Таковы основные принципы классификации Виллиса. Нельзя сказать, чтобы она была очень ясной, да автор и сам это понял и внес во второе издание своей книги некоторые коррективы, не особенно, впрочем, существенные. Очистив техническую кинематику от инородных включений, Виллис не смог провести последовательный анализ, в результате чего в его систематике механизмов оказались слабые места.
В третьей четверти века шарнирные механизмы попадают также в поле зрения немецких ученых, ведущая роль здесь, несомненно, принадлежит крупнейшему немецкому машиноведу Рело, который в значительной степени обогатил учение о машинах.
Франц Рело родился 30 сентября 1829 г. в Эшвейлере, близ Ахена, в семье, для которой техника была традиционным занятием. Получив начальное образование в школе и некоторую техническую подготовку в семье, он начал работать на заводе, сперва учеником, а затем конструктором и техником. Работая, он усиленно занимался самообразованием, в частности изучал труды Редтенбахера. С 1850 по 1852 г. он слушал лекции в Политехническом институте в Карлсруэ, всецело находившемся в те годы под влиянием Редтенбахера.
Во введении Рело излагает краткую историю науки о машинах. Разбирая труды своих предшественников, он приходит к выводу, что в сущности кинематика как наука еще не создана. Каждая наука характеризуется определенной системой. В технической науке такая система должна не только пояснять, но и помогать создавать новое, в частности, в механике машин система должна облегчить создание новых механизмов, однако, говорит Рело, ни одна из предшествовавших систем Новых механизмов не создала.
Первая глава содержит изложение основных принципов науки. Рело утверждает, что науку о машинах следует разделить на четыре отдельных дисциплины: собственно науку о машинах, которая должна заниматься описанием существующих машин; теорию машин, которая является применением механики к машинам и объектом изучения которой должны быть машины-двигатели, а отчасти и рабочие машины; учение о построении машин и кинематику, или теорию механизмов.
Связь между понятиями механизма и машины принимает затем у Рело следующую форму: если мы понудим одно из звеньев механизма с помощью некоторой силы изменить первоначальное положение, то получим машину. Как видим, в определении машины Рело исходит совершенно из иного принципа, чем его предшественники. У них существование машины определялось наличием некоторых составных частей, а именно, двигателя, или приемника, передачи и рабочего органа, или орудия. Иначе говоря, машина определялась аналитически. Идея Рело синтетична: он исходит из понятия кинематической пары и через понятия кинематической цепи и механизма переходит к определению машины. Вместе с тем определение Рело оказывается неполным: ему удовлетворяют и весы, и теодолит, и другие подобные приборы; таким образом, понятие машины расширяется, что едва ли необходимо.
Во второй главе изложены принципы форономии. Под этим названием Рело, пользуясь определением Аронгольда, понимает кинематическую геометрию. Сюда он относит понятия мгновенного центра вращения, полодий, исследование движения.
Исследованию кинематических пар, центрального понятия кинематики Рело, посвящены третья и четвертая главы. Рело указывает, что существует лишь три вида низших облекающих пар: вращательные, поступательные и винтовые. Высшими Рело называет пары, образуемые телами, которые могут вращаться около мгновенной оси, непрерывно меняющей свое положение. Он разбирает зависимые пары, образующиеся при силовом замыкании гибкими и жидкими элементами, пружинами. Кинематические цепи Рело исследует в пятой главе.
В десятой главе Рело исследует большую группу шестеренных механизмов, служащих для передвижения жидкостей и газов. Здесь он впервые высказывает мысль о том, что элементы кинематических пар не обязательно должны быть твердыми телами.
Двенадцатая глава посвящена анализу понятия машины. Она послужила поводом к дискуссии о машине, разыгравшейся вскоре после выхода книги в свет. Начав с критики концепции французской школы, наиболее ярко выраженной в трудах Понселе, Рело приводит ряд примеров, которые, по его мнению, не соответствуют основному положению Понселе о трехчленном делении машины на двигатель, передачу и орудие. На основании подобных рассуждений Рело выводит, что орудие не составляет необходимой части машины, а является лишь возможным ее элементом. По функциональному признаку Рело делит все машины на два класса: машины для изменения положения и машины для изменения формы.
Рело приходит к выводу: чтобы при помощи машины получить тело определенной формы, необходимо, чтобы форма орудия была огибающей заданной поверхности. Этот вывод является одним из первых, если вообще не первым, относящимся к механике орудия.
Продолжая свои рассуждения, Рело утверждает далее, что ни орудие, ни привод, ни трансмиссия не являются обязательными составляющими машины; машина представляет собой замкнутую кинематическую цепь, причем передвигаемое или обрабатываемое тело является членом или кинематическим элементом этой цепи. Взамен общепринятой классификации Рело предлагает свою:
а) главный механизм, в котором можно обнаружить
приемник и орудие;
б) распределитель с его подразделениями, питанием и отведением;
в) механизм регулировки и остановки;
г) механизм передачи.
Однако Рело отмечает, что и эта классификация несовершенна и что некоторые устройства в машинах могут попасть в разные ее подразделения.
Последняя, тринадцатая, Глава посвящена синтезу механизмов. Рело различает прямой и непрямой синтез. Под прямым синтезом он понимает составление механизмов, которые могут обеспечить на заданном обрабатываемом теле определенные изменения места и формы. Но основным методом составления новых механизмов Рело считает непрямой синтез, под которым подразумевает предварительное решение всех задач определенного типа, среди которых может оказаться и искомая.
Вместе с тем целый ряд идей и определений Рело оказался недостаточно обоснованным и вызвал возражения. Рело пользовался большим авторитетом среди ученых в области прикладной механики. Но у него было и много противников, борьба с которыми зачастую принимала с обеих сторон резкие формы и особенно обострилась на рубеже столетий.
2 ВКЛАД ЧЕБЫШЕВА В РАЗВИТИЕ ТЕОРИИ МЕХАНИЗМОВ И МАШИН
Свою педагогическую деятельность в Петербургском университете Чебышев начал с чтения курса практической механики. Кроме этого курса Чебышев в разное время читал высшую алгебру, сферическую тригонометрию, аналитическую геометрию, теорию чисел, интегральное исчисление, теорию вероятностей, теорию эллиптических функций.
С Чебышева начинается большая русская наука в области механики машин. Более того, он оказал существенное влияние и на мировую историю науки: в сущности лишь после его работ механика машин получила возможность использовать математический аппарат.
Важнейшим направлением исследований Чебышева в области кинематики было создание им теории шарнирных механизмов, значение которой для развития теории машин было осознано значительно позже.
Для решения задач синтеза шарнирных механизмов Чебышев разработал специальную математическую теорию — теорию наилучшего приближения функций полиномами. Основной задачей ее явилось нахождение точки, описывающей приближенно прямую линию.
3m – 2 (n+v) = l.
Эта знаменитая формула в несколько измененном виде была названа формулой Чебышева.
И в Академии наук, и в университете П. Л. Чебышев был очень близок с В. Я. Буняковским и О. И. Сомовым. Благодаря трудам этих трех ученых в 60-х годах XIХ в. была создана Петербургская математическая школа. Можно сказать, что к этому времени относится и создание русской школы в области теории механизмов и машин.
П. JI. Чебышев заложил основы исследования структуры механизмов, разработал метрический синтез механизмов и глубоко теоретически и практически изучил шарнирные механизмы. В сущности лишь от него начинается планомерное изучение этой важнейшей группы механизмов, и он первый указал на то, что теория механизмов — это наука математическая. Ученики Чебышева продолжили и закрепили исследование и развитие его идей в области механики машин, поэтому с его именем обычно и связывается становление русской специальной научной школы в этом направлении.
3 ФОРМИРОВАНИЕ КОНСТРУКТОРСКО - ТЕХНОЛОГИЧЕСКОГО НАПРАВЛЕНИЯ ИЗУЧЕНИЯ МАШИН.
В ходе развития машинного производства машиноведение становилось все более важным фактором технического прогресса машиностроения. Важную роль играли те научные поиски и многочисленные исследования, которые были развиты в первые десятилетия XX в. на основании исследовательских работ последней трети XIX в.
В Англии наибольшую роль в развитии кинематики машин на рубеже XIX—XX вв. сыграли работы А. Кейли, Д. Сильвестра и особенно А. Кеннеди, создавшего первый английский учебник по механике машин.
Весьма широкой и плодотворной была на рубеже столетий деятельность русской школы механики машин. Россия, в целом значительно уступавшая в промышленном развитии главным капиталистическим странам мира, имела ряд солидных технических школ. Многие русские профессора сочетали работу в университетах с преподаванием в технических вузах.
Проблемы трения в машинах и создания высокоэффективных способов жидкостной смазки успешно разрабатывал профессор Н. П. Петров — один из основателей гидродинамической теории трения. Он впервые дал сложным явлениям трения математическую интерпретацию, создал методы их точного измерения и регулирования, ввел в практику машиностроения многие ранее неизвестные коэффициенты трения, разработал правила изготовления смазок для узлов машин.
Крупным вкладом в науку о механизмах в середине XIX столетия явилась работа английского ученого Р. Виллиса, посвященная теории механизмов. Ему принадлежит классификация механизмов, основы которой не потеряли и теперь своего значения.
Создание русской школы по теории механизмов относится к середине XIX в. и непосредственно связано с именем П. Л. Чебышева, ставшего основоположником теории структурного и кинематического синтеза механизмов. Его труды стали тем фундаментом, на котором были впоследствии развиты аналитические методы синтеза механизмов, получившие такое широкое развитие в наше время.
На протяжении своего становления теория механизмов и машин находилась на стыке идей механики и теоретического машиностроения. Однако запросы машиностроения наука о машинах полностью удовлетворить не смогла: попытки разработать методы синтеза механизмов были неудачными, не было создано и теории рабочих машин.
Разработка новых направлений теории механизмов и машин стала делом ученых второй четверти XX в.
СПИСОК ЛИТЕРАТУРЫ
1. Артоболевский И. И. Теория механизмов и машин. Учебник для втузов. – М.: Наука, 1988.
2. Боголюбов Н.И. Теория механизмов и машин в историческом развитии ее идей. – М.: Наука, 1976.
3. Зайцев Г.Н. История техники и технологий. Учебник для вузов. – СПб: Политехника, 2007.
4. Ковалев В.И. История техники: учебное пособие для вузов – 3 изд. – Старый Оскол: ТНТ, 2009.
В 1914 ᴦ. он написал труд ʼʼДинамика механизмовʼʼ, который явился первым систематическим курсом в этой области. Н.И. Мерцалов первым начал исследовать пространственные механизмы. Академик В.П. Горячкин провёл фундаментальные исследования в области теории сельскохозяйственных машин.
Профессор Л.А. Ассур разработал строгую в научном отношении классификацию плоских шарнирно-рычажных механизмов, которая послужила базой для многочисленных исследований в этой области советских учёных. В XIX и XX столетиях большое значение для развития практической механики в России приобретают исследования академиков М.В. Остроградского и А.М. Ляпунова, профессора И.В. Мещерского и др.
Достижения отечественной школы теории механизмов и машин в дореволюционный период заслуживают высокой оценки. Но подлинный расцвет она получила в связи с бурным развитием советского машиностроения и в настоящее время занимает одно из ведущих мест в мире. За отводящееся на курс время трудно проанализировать или даже перечислить многочисленные и значительные исследования советских учёных в этой области, упомянем лишь о некоторых из них.
На протяжении более сорока лет в Москве плодотворную научно-исследовательскую и научно-организаторскую деятельность в области теории механизмов и машин вёл академик И.И. Артоболевский. Его труды по теории структуры, по теории пространственных механизмов, синтезу и динамике машин и механизмов стали классическими. Он создал новые методы проективной и кинематической геометрии и аналитической динамики. Академик Н.Г. Бруевич приложил методы теории вероятностей к исследованию погрешностей действия машин и приборов и явился основателем теории точности механизмов. Он также развил аналитические методы исследования плоских и пространственных механизмов.
ʼʼТеория механизмов и машинʼʼ представляет собой один из важных разделов прикладной механики, в котором изложены методы исследования и построения механизмов и машин. Под исследованием механизмов и машин понимают изучение движения звеньев машин и их точек. Построение, или синтез, механизмов представляет разработку рациональных методов определения параметров механизмов, машин и приборов по заданным функциям их движения.
В условиях научно-технической революции успешная производственная и научно-исследовательская деятельность специалиста невозможна без соответствующей теоретической, практической и общеинженерной конструкторско-технологической подготовки.
Этот курс являемся фундаментальным в системе подготовки инженеров. Структура и содержание курса предусматривает обязательное последовательное изучение составляющих его дисциплин и их разделов при творческой направленности лабораторного практикума и курсового проектирования.
Эффективность изучения курса должна быть достигнута при условиях: правильной дозировки учебной нагрузки (в целом и по отдельным разделам и главам); чёткости и ясности выдаваемых заданий; обеспеченности учебными и другими пособиями высокого качества (системности, краткости, обстоятельности); систематичности в руководстве работой студентов, осуществляемом по плану; своевременного контроля сроков, объёма и качества выполнения заданий и проектов.
РАЗВИТИЯ ТЕОРИИ МЕХАНИЗМОВ М МАШИН - понятие и виды. Классификация и особенности категории "РАЗВИТИЯ ТЕОРИИ МЕХАНИЗМОВ М МАШИН" 2017, 2018.
Читайте также: