
Интерфейсы измерительных систем реферат
Обновлено: 02.07.2024
* Данная работа не является научным трудом, не является выпускной квалификационной работой и представляет собой результат обработки, структурирования и форматирования собранной информации, предназначенной для использования в качестве источника материала при самостоятельной подготовки учебных работ.
МИНИСТЕРСТВО ОБРАЗОВАНИЯ РОССИЙСКОЙ ФЕДЕРАЦИИ
Московская академия приборостроения и информатики
На тему: Информационно измерительные системы
1 Измерительные информационные системы
1.1 Измерительная система
1.1.1 Измерительный канал измерительной системы
1.3 Системы автоматического контроля
1.4 Системы технической диагностики
1.5 Структура измерительной информационной системы
Список использованных источников
Измерительная информационная система (ИИС) - это совокупность функционально объединенных измерительных, вычислительных и других вспомогательных технических средств, для получения измерительной информации, ее преобразования, обработки с целью представления потребителю в требуемом виде, либо автоматического осуществления логических функций контроля, диагностики, идентификации и др.
Это определение было написано в ГОСТ 8.437-81 Системы информационно-измерительные. Который утратил силу в Российской Федерации от 27.09.2001 На сегодняшний день прямой замены этому ГОСТу нет.
В наш век информационных технологий становится все более актуальным необходимость ИИС т.к. это упрощает и облегчает, доступ к необходимой информации, регулирование сложными технологическими процессами и т.д
В данном реферате рассмотрены основные составляющие и основные направления ИИС, т.к. конкретных типов ИИС на сегодняшний день очень много и в основном суть (состав и назначение) их однообразна.
1 Измерительные информационные системы
Измерительная информационная система (ИИС) - это совокупность функционально объединенных измерительных, вычислительных и других вспомогательных технических средств, для получения измерительной информации, ее преобразования, обработки с целью представления потребителю в требуемом виде, либо автоматического осуществления логических функций контроля, диагностики, идентификации и др./1/.
В зависимости от выполняемых функций ИИС реализуются в виде измерительных систем (ИС), систем автоматического контроля, технической диагностики и др.
В свою очередь в зависимости от назначения измерительные системы разделяют на измерительные информационные, измерительные контролирующие, измерительные управляющие системы и др. /2/.
1.1 Измерительная система
Измерительная система (ИС) — совокупность определенным образом соединенных между собой линиями связи средств измерений (измерительных преобразователей, мер, измерительных коммутаторов, измерительных приборов) и других технических устройств (компонентов измерительной системы), образующих измерительные каналы, реализующая процесс измерений и обеспечивающая автоматическое (автоматизированное) получение результатов измерений (выражаемых числом или кодом) в общем случае изменяющихся во времени и распределенных в пространстве величин, характеризующих определенные свойства (состояние) объекта измерений.
Измерительные системы обладают основными признаками средств измерений и являются их специфической разновидностью/3/.
Основными областями применения собственно измерительных систем являются научные исследования, испытания различных объектов, учетные операции, и др.
Наиболее крупной структурной единицей, для которой могут нормироваться метрологические характеристики (MX), является измерительный канал (ИК) ИС.
1.1.1 Измерительный канал измерительной системы (измерительный канал ИС):
- Конструктивно или функционально выделяемая часть ИС, выполняющая законченную функцию от восприятия измеряемой величины до получения результата ее измерений, выражаемого числом или соответствующим ему кодом, или до получения аналогового сигнала, один из параметров которого — функция измеряемой величины.
Он представляет собой последовательное соединение СИ, образующих ИС (некоторые из этих СИ сами могут быть многоканальными, в этом случае следует говорить о последовательном соединении ИК указанных СИ). Такое соединение СИ, предусмотренное алгоритмом функционирования, выполняет законченную функцию от восприятия измеряемой величины до индикации или регистрации результата измерений включительно, или преобразование его в сигнал, удобный для дальнейшего использования вне ИС, для ввода в цифровое или аналоговое вычислительное устройство, входящее в состав ИС, для совместного преобразования с другими величинами, для воздействия на исполнительные механизмы.
Типовая структура ИК включает в себя первичный измерительный преобразователь, связующий компонент измерительной системы (Техническое устройство или часть окружающей среды, предназначенное или используемое для передачи с минимально возможными искажениями сигналов, несущих информацию об измеряемой величине от одного компонента ИС к другому (проводная линия связи, радиоканал, телефонная линия связи, высоковольтная линия электропередачи с соответствующей каналообразующей аппаратурой, а также переходные устройства — клеммные колодки, кабельные разъемы и т. п.)), промежуточный (унифицирующий) измерительный преобразователь, аналого-цифровой преобразователь, процессор, цифро-аналоговый преобразователь.
Различают простые ИК, реализующие прямые измерения какой-либо величины, и сложные ИК, реализующие косвенные, совокупные или совместные измерения, начальная часть которых разделяется на несколько простых ИК, например, при измерениях мощности в электрических сетях начальная часть ИК состоит из простых каналов измерений напряжения и тока. Учитывая многоканальность систем, использование одних и тех же устройств в составе различных ИК, последние можно выделить зачастую только функционально и их конфигурация реализуется программным путем.
Протяженность ИК может составлять от десятков метров до нескольких сотен километров. Число ИК — от нескольких десятков до нескольких тысяч. Информация от датчиков передается обычно электрическими сигналами (реже — пневматическими) — ток, напряжение, частота следования импульсов. В некоторых областях измерений современные датчики имеют цифровой выход. При большой протяженности ИК используются радиосигналы. Вторичную часть ИС после линий связи, соединяющих ее с датчиками, обычно называют измерительно-вычислительным (ИВК), (комплексный компонент измерительной системы (комплексный компонент ИС, измерительно-вычислительный комплекс): Конструктивно объединенная или территориально локализованная совокупность компонентов, составляющая часть ИС, завершающая, как правило, измерительные преобразования, вычислительные и логические операции, предусмотренные процессом измерений и алгоритмами обработки результатов измерений в иных целях, а также выработки выходных сигналов системы.), или программно-техническим (ПТК) комплексом. Значительная часть современных ИВК (ПТК) строится на базе контроллеров, как правило, модульного исполнения, включающих в себя аналого-цифровые и цифро-аналоговые преобразователи, процессор, модули дискретной (бинарной) информации (входные и выходные), вспомогательные устройства. Промышленность выпускает достаточно универсальные контроллеры, ИВК (ПТК), которые могут использоваться для автоматизации работы различных объектов. Состав, конфигурация, программное обеспечение таких комплексов конкретизируется с учетом специфики объекта. Выделение ИС в отдельный вид СИ обусловлено рядом их особенностей, порождающих специфику их метрологического обеспечения.
К числу таких особенностей можно отнести:
комплектацию ИС как единого, законченного изделия из частей, выпускаемых различными заводами-изготовителями, только на месте эксплуатации. В результате этого отсутствует заводская нормативная и техническая документация (технические условия), регламентирующая технические, в частности, метрологические требования к ИС как к единому изделию;
многоканальность систем, в результате чего ГМКН может подлежать не вся ИС, а только часть ее ИК;
разнесенность на значительные расстояния (иногда на десятки, сотни километров) отдельных частей ИС и, как следствие, различие внешних условий, в которых они находятся;
возможность развития, наращивания ИС в процессе эксплуатации или возможность изменения ее состава (структуры) в зависимости от целей эксперимента, что по существу исключает или затрудняет регламентацию требований к таким ИС в отличие от обычных СИ (измерительных приборов и т.д.), являющихся завершенными изделиями на момент выпуска их заводом-изготовителем;
размещение отдельных частей ИС может быть проведено на перемещающихся объектах. В результате одна (передающая) часть ИС может работать с различными приемными частями в процессе одного и того же цикла измерений по мере перемещения объекта. При выпуске и при эксплуатации таких ИС заранее неизвестны конкретные экземпляры приемной и передающей частей, которые будут работать совместно, тем самым отсутствует „стабильный” объект, для которого регламентируются метрологические требования;
использование первичных измерительных преобразователей, встроенных в технологическое оборудование, что затрудняет контроль ИС в целом;
широкое использование в составе ИС вычислительной техники, что выдвигает проблему аттестации алгоритмов обработки результатов измерений.
Особенности ИС делают особенно актуальной для них проблему расчета MX ИК ИС по MX образующих их компонентов. Метод расчета MX ИК ИС существенно зависит от того, относятся ли образующие его СИ к линейным устройствам. Методы расчета нелинейных систем зависят от вида нелинейности, возможности расчленения СИ на линейную инерционную и нелинейную без инерционную часть, и от других обстоятельств и отличаются большим разнообразием. При расчете MX ИК ИС можно выделить следующие, наиболее характерные этапы:
определение погрешности, обусловленной взаимодействием выходных и входных цепей последовательно включенных СИ;
определение погрешности, вносимой линиями связи;
определение погрешности, обусловленной взаимным влиянием ИК, если не приняты меры к исключению такого влияния;
приведение MX частей ИК, в том числе характеристик погрешностей, указанных в а), б), в), к одной точке ИК, как правило, к его выходу;
суммирование (объединение) MX составных частей, в результате которого получают расчетные значения MX ИК.
Для расчета характеристик случайной составляющей погрешности ИК, являющейся случайной функцией времени, в общем случае, необходимо располагать данными о спектральном составе погрешностей СИ, образующих ИК, и о динамический, характеристиках этих СИ, чтобы учесть эффект фильтрации случайных погрешностей за счет инерционности компонентов ИК. Если пренебречь эффектом фильтрации, то общее отношение между погрешностью ИК и погрешностями образующих его компонентов может быть представлено в виде:
В САК благодаря переходу от измерения абсолютных величин к относительным эффективность работы значительно повышается. Оператор САК при таком способе количественной оценки получает информацию в единицах, непосредственно характеризующих уровень опасности в поведении контролируемого объекта (процесса).
САК имеют обратную связь, используемую для воздействия на объект контроля. В них внешняя память имеет значительно меньший объем, чем объем памяти ИС, так как обработка и представление информации ведутся в реальном режиме контроля объекта.
Объем априорной информации об объекте контроля в отличие от ИС достаточен для составления алгоритма контроля и функционирования самой САК, предусматривающего выполнение операций по обработке информации. Алгоритм функционирования САК определяется параметрами объекта контроля. По сравнению с ИС эксплуатационные параметры САК более высокие: длительность непрерывной работы, устойчивость и воздействие промышленных помех, климатические и механические воздействия.
Системы автоматического контроля могут быть встроенные в объект контроля и внешние по отношению к нему. Первые преимущественно применяются в сложном радиоэлектронном оборудовании и входят в комплект такого оборудования.
1.4 Системы технической диагностики (СТД).
СТД представляет собой совокупность множества возможных состояний объекта, множества сигналов, несущих информацию о состоянии объекта, и алгоритмы их сопоставления.
Объектами технической диагностики являются технические системы. Элементы любого технического объекта обычно могут находиться в двух состояниях: работоспособном и неработоспособном. Поэтому задачей систем технической диагностики СТД является определение работоспособности элемента и локализация неисправностей.
В СТД определение состояния объекта осуществляется программными средствами диагностики. При поиске применяется комбинационный или последовательный метод.
При комбинационном поиске выполняется заданное число проверок независимо от порядка их осуществления. Последовательный поиск связан с анализом результатов каждой проверки и принятием решения на проведение последующей проверки. Системы технической диагностики подразделяют на специализированные и универсальные.
СТД подразделяют на диагностические и прогнозирующие системы. Диагностические системы предназначены для установления точного диагноза, т. е. для обнаружения факта неисправности и локализации места неисправности.
Прогнозирующие СТД по результатам проверки в предыдущие моменты времени предсказывают поведение объекта в будущем.
Существуют еще такие системы как:
Системы распознавания образов (СРО). Предназначены для определения степени соответствия между исследуемым объектом и эталонным образом.
Телеизмерительные информационные системы (ТИИС). которые предназначаются для измерения параметров сосредоточенных и рассредоточенных объектов. В зависимости от того, какой параметр несущего сигнала используется для передачи информации.
Характеристика последовательных и параллельно-последовательных интерфейсов измерительных систем. Приведение примеров их одноступенчатых, двухступенчатых и трехступенчатых структур. Описание процесса обмена информацией между функциональными блоками.
| Рубрика | Программирование, компьютеры и кибернетика |
| Вид | контрольная работа |
| Язык | русский |
| Дата добавления | 13.10.2015 |
| Размер файла | 805,2 K |
Студенты, аспиранты, молодые ученые, использующие базу знаний в своей учебе и работе, будут вам очень благодарны.
1. Типы интерфейсов измерительных систем
По принципу обмена информацией интерфейсы делятся на:
Параллельные - имеют шины (совокупность линий передачи бинарных кодов), которые передают целое слово цифровых данных сразу. Быстродействующие, но неэкономичны, громоздки и имеют низкую помехозащищенность.
Последовательные - передают цифровую информацию побитно, пакетами и сравнительно с параллельными - медленно. Применяют при передаче на большие расстояния, там, где требуются простые, экономичные системы с высокой помехоустойчивостью.
Параллельно-последовательные - комбинация из двух первых типов. Применяют реже. Сочетают более высокое быстродействие и относительную простоту. По способу передачи информации интерфейсы делят на синхронные и асинхронные. Первый тип интерфейсов передают информацию в такт со специальными синхросигналами (которые надо передавать отдельно), при этом все модули работают с одинаковой скоростью. Асинхронные протоколы предполагают квитирование передачи - передатчик ожидает подтверждения приема. В таких системах можно использовать модули с различным быстродействием. По режиму обмена информацией могут быть интерфейсы, в которых передача может идти одновременно в обе стороны, (любой модуль может передавать информацию по интерфейсу в произвольный момент времени) - такие системы называют дуплексными. Если в интерфейсе возможна в данный момент времени передача только от одного из модулей - такие системы называют симплексными. Полудуплексный режим предполагает, что любой из модулей может начать работу, если интерфейс свободен. Мультиплексный режим работы - в каждый момент времени связь может быть между любой парой модулей в системе (в магистральном интерфейсе, например). Конструктивно интерфейс может включать в себя линии данных, адресные линии, линии управления и синхронизации и пр. Кроме этого, в состав интерфейса входят активные и пассивные согласующие устройства и блоки.
2. Структуры интерфейсов измерительных систем
В настоящее время используются следующие структуры интерфейсов: одноступенчатые, двухступенчатые и трехступенчатые возможными вариантами исполнения: цепочечная, радиальная, магистральная, радиально-магистральная, каждая из которых может быть с централизованным или децентрализованным управлением (рис. 1).
Рис. 1. Основные структуры интерфейсов:
а -- цепочечная; б -- радиальная; в -- магистральная; г -- радиально-магистральная
Обмен информацией может быть осуществлен синхронным и асинхронным методами.
Синхронный метод передачи и приема сигналов производится в фиксированные моменты времени. Темп обмена информацией при асинхронном методе определяется сигналом квитирования. Этот метод особенно эффективен при обмене информацией с различным быстродействием функциональных блоков.
В ИИС используются следующие основные интерфейсы: КОП КАМАК, PDP-11, (общая шина), RS-232C, RS-422, RS-423, RS-485, а также системные интерфейсы 8, 16, 32-разрядных микро ЭВМ.
Рис. 2. Приборный интерфейс:
К -- коммутатор; АЦП -- аналого-цифровой преобразователь; ЦПУ -- цифропечатающее устройство; ИКАР -- интерфейсные карты
Интерфейс КАМАК. Он применяется для разветвленных систем сбора информации с большим числом первичных преобразователей и предоставляет возможность построения ИИС с двумя уровнями централизации.
Основными конструктивными элементами являются крейт модуль, стойка.
Крейт (каркас) имеет 25 станций (ячеек), в которые вставляются модули (вставные кассеты). Из них 23 станции рабочие, они служат для включения модулей, 24-я и 25-я станции отводятся для контроллера крейта (КК).
Функциональные блоки (ФБ) могут занимать произвольное расположение, так как адрес каждому ФБ присваивается после его установки в крейт.
Структурная схема системы в стандарте КАМАК представлена на рис. 3.
Рис. 3. Структурная схема системы в стандарте КАМАК
Магистраль крейта состоит из 81 сквозной шины, проходящей через все модули, и двух индивидуальных шин связи каждого управляемого модуля с контроллером крейта. Внутри крейтовые связи образуют горизонтальный интерфейс системы КАМАК (Dataway). Крейты связываются между собой и с центральной ЭВМ верхнего уровня. Меж крейтовые связи проходят через контроллеры крейтов и строятся по принципам ветви (до семи крейтов вертикальный) или замкнутого кольца. Эти связи образуют интерфейс системы КАМАК (Branch highway). Структура КАМАК, таким образом, пирамидальная и включает в себя 2. 4 уровня: верхний уровень -- ЭВМ; второй -- контроллеры ветвей; третий -- контроллеры крейтов; четвертый -- управляемые модули.
Одно крейтовые системы двухуровневые.
Основной принцип, заложенный в системе КАМАК, -- принцип использования центральной ЭВМ. Направления протоколов команд и информации жестко связаны.
Для защиты от помех используются экранирование, заземление, согласование характеристик линий связи, а также контроль по четности и повторение передачи кодов.
Основной недостаток системы -- большая аппаратурная избыточность и наличие сложной системной части практически в каждом модуле, большая стоимость интерфейса и всей системы в целом. Поэтому стандарт КАМАК следует использовать только в сложных ИИС.
Последовательные интерфейсы периферийных устройств. Ими могут служить интерфейсы RS-232C, RS-423, RS-422, RS- 485. Основные параметры этих интерфейсов представлены в табл.1. В основе интерфейсов RS-232C, RS-422 лежит однопроводная несогласованная линия (рис. 4),
Рис. 4. Схемы однопроводной несогласованной (а) и симметричных дифференциальных последовательных линий связи с симплексным (б) и полудуплексным (в) режимами передачи информации по которой информация передается двуполярными посылками со скоростью до 20 Кбод (RS-232C) и 300 Кбод (RS-423) при длине линии не более 15 и 600 м соответственно.
Например, в интерфейсе RS-423 при скорости передачи информации 3 Кбод длина линии может достигать 1200 м, а при скорости 300 Кбод -- всего лишь 12 м. Кроме того, для уменьшения взаимных помех скорость нарастания фронтов передаваемых сигналов ограничивается до 30 В/мкс.
Интерфейс RS-422 распространяется на симметричные дифференциальные линии (витая пара, радиочастотный кабель), обладающие более высокими характеристиками, чем однопроводные линии. В частности, по линии интерфейса RS-422 возможна передача информации со скоростью до 100 Кбод на расстояние до 1200 м и со скоростью 10 Мбод на расстояние до 12 м. Дифференциальный режим (рис.4, б) достигается применением дифференциального передатчика, согласованной линии связи (в виде витой пары или радиочастотного кабеля) и дифференциального приемника. Сигнал передатчика появляется на входе приемника в виде разностного напряжения, тогда как помехи в линии остаются синфазными. Благодаря этому дифференциальный приемник с достаточным диапазоном подавления синфазной составляющей может отличать сигнал от помехи. К тому же интерфейс RS-422 позволяет наряду с симплексным режимом передачи (см. рис. 4, б) организовать полудуплексный режим передачи (рис. 4, в) и мультиплексный режим последовательной передачи информации.
В последнем случае, применяемом для связи между периферийными устройствами микропроцессорных систем, для передачи информации в одном направлении используются две дифференциальные симметричные линии связи, например витые пары. В исходящем направлении включены один передатчик и п приемников. Такой режим позволяет обслуживать до 12 абонентов. Основные трудности заключаются в обеспечении хорошего заземления системы.
параллельный последовательный измерительный интерфейс
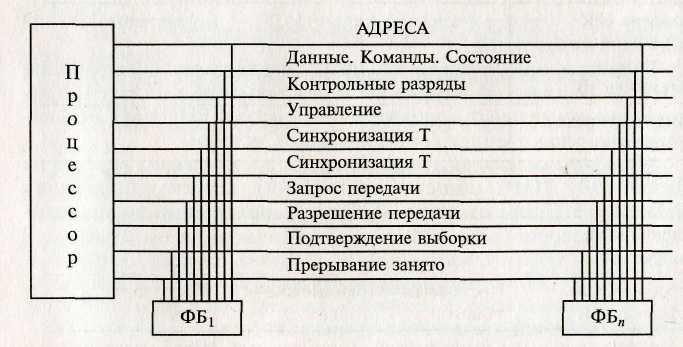
К каналу обмена информацией между отдельными функциональными блоками ЭВМ можно подключать дополнительные блоки памяти и различные устройства ввода-вывода. Такое расширение возможностей ЭВМ позволяет использовать его в ИИС, АСУТП и строить на ее базе ИВК.
Обмен информацией между функциональными блоками происходит асинхронно по каналу, который представляет собой магистраль, состоящую из 38 линий.
Подобные документы
Методика автоматизированного логико-вероятностного расчета надежности для различных параллельно-последовательных структур. Определение вероятности безотказной работы. Структурная и эквивалентная схемы определения надежности сложной системы управления.
лабораторная работа [116,1 K], добавлен 04.11.2015
Применение и развитие измерительной техники. Сущность, значение и классификация информационных измерительных систем, их функции и признаки. Характеристика общих принципов их построения и использования. Основные этапы создания измерительных систем.
реферат [25,9 K], добавлен 19.02.2011
Определение структуры информационно-измерительных систем и устройств сопряжения с ЭВМ. Расчет метрологических характеристик измерительных каналов. Протокол измерений значений функции преобразования ИК ИИС. Продолжительность межповерочных интервалов.
курсовая работа [171,4 K], добавлен 22.03.2015
Характеристики интерфейсов информационного взаимодействия компьютерных иерархических систем. Принцип "обратной связи". Свойства, простота и правила создания программно-аппаратных интерфейсов. Новые направления в проектировании компьютерных систем.
курсовая работа [112,7 K], добавлен 05.01.2017
Изучение системной поддержки, применения, конфигурирования параллельного (LPT) и последовательного (СОМ) интерфейсов ввода-вывода компьютерных систем, проведение их технической диагностики, устранение неисправностей. Разработка собственных устройств USB.
дипломная работа [7,3 M], добавлен 10.07.2010
Разработка городских систем на базе мобильных интерфейсов. Методики геокодирования в информационных системах, ориентированных на определенную группу пользователей. Прототипная реализация туристической карты для мобильных устройств на платформе Android.
дипломная работа [4,3 M], добавлен 05.12.2013
Сущность и предназначение последовательных интерфейсов. Формат асинхронной и синхронной посылки. Функциональные возможности и схема соединения по интерфейсу RS-232C. Назначение сигналов интерфейса. Понятие, конфигурирование и использование СОМ-портов.

использующие ЭВМ для программного управления работой системы.
Возросшие объемы проводимых измерений привели к широкому
использованию программно-управляемых СИ. При этом возросшие требо -
вания к характеристикам СИ оказали существенное влияние на методы
Информационно-измерительные системы содерж ат ряд подсистем:
измерительную, сбора, преобразования, предварительной обработки данных
и подсистемы управления СИ в целом. Все подсистемы в ИИС соединены
между собой в единую систем у. Кроме того, ИИС в настоящее время проек -
тируют на основе агрегатного (модульного) принципа, по которому уст -
ройства, образующие систему, выполняются в виде отдельных, самостоя -
тельных изделий (приборов, блоков). В составе ИИС эти устройства выпол -
няют определенные операции и взаимодействуют друг с другом, переда вая
информационные и управляющие сигналы через систему сопряжения.
Для униф ицированных систем сопряжения между устройствами, участ-
вующими в обмене информ ации, стал общепринятым термин интерфейс
(interface). Под интерфейсом (или сопряжением) поним ают совокуп ность
схемотехнических средств, об еспечивающих непосредств енное
взаимодействие составных элементов ИИС (ГОСТ 15971—74). Устройства
подсоединяются к системе сопряжения и объединяются в ИИС по опреде -
ленным правилам, относя щимся к физической реализации сопряжении.
Конструктивное исполнение этих устройств, характеристики вырабатывае -
мых и принимаемых блоками сигналов и последовательности выдавае мых
сигналов во времени позволяют упорядочить обмен информацией между
Под интерфейсной систем ой понимают совокупность логических уст ройств,
объединенных унифицированным набором связей и предназначен ных
для обеспечения информационной, электрической и конструктивной
совместимости. Интерфейсная система также реализует алгоритмы взаи -
модействия функциональных модулей в соответствии с установленными
Жесткая унификация и стандартизация входных и выходных пара м етров
элементов системы; использование функциональных блоков с адаптивными

Жесткая унификация и стандартизация входных и выходных пара м етров
элементов системы; использование функциональных блоков с адаптивными
На практике часто сочетают оба подхода. Стандартизация интерфей сов
- значительно сократить число типов СИ и их устройств сопряжения;
- ускорить и упростить разработку отдельных СИ и ИИС в целом;
- упростить техническое обслуживание и модернизацию ИИС;
Применение развитых стандартных интерфейсов при организации ИИС
позволяет обеспечить быструю компоновку системы и разработку программ
Основной структурной единицей ИИС является функциональный блок
ФБ, который представляет собой один или несколько объединенных и
взаимодействующих между собой измерительных преобразователей.
Взаимодействие ФБ осуществляется через интерфейсные блоки ИБ по
командам, организующим обмен данными. Команды управления форми -
руются в управляющем блоке УБ и воздействуют на интерфейсные блоки
Между ФБ ИИС осуществляется обмен информационными и
сведения о значении из меряемого параметра, диапазоне измерения, времени
измерения, результатах контроля состояния измерительных каналов и др.
выполнения ими последовательности операций во времени, команде
контроля состояния измерительных каналов. Интерфейс может быть общим
для устройств разных типов, наиболее распространенные интерфейсы
определены международными, государ ственными и отраслевыми
стандартами. Стандарт (ГОСТ 26016—81 "Единая система стандартов
приборостроения. . Интерфейсы, признаки клас сификации и общие
требования") включает четыре признака классификации: способ соединения
комплектов системы (магистральный, радиаль ный, цепочечный,
комбинированный); способ передачи информации (па раллельный,
последовательный, параллельно-последовательный); п ринцип об мена
информацией (асинхронный, синхронный); режим передачи ин формации
(двусторонняя одновременная передача, двусторонняя пооче редная передача,
Указанные признаки позволяют характеризовать только определен ные
Более полная характеристика и систематизация интерфейсов м огут быть
выполнены при условии классификации по нескольким совокупнос тям
признаков: функциональному назначению, логической функциональ ной

К основным характеристикам интерфейса относятся следующие:
функциональное назначение; структура или тип организации связей;
принцип обм ена информацией; способ обмена данными; режим обмена
данными; номенклатура шин и сигналов; количество линий; количество
линий для передачи данных; количество адресов; количество команд;
быстродействие; длина линий связи; число подключаемых устройств; тип
Соединение отдельных приборов и блоков между собой осуществля ется
линиями связи или линиями интерфейса. Линии интерфейса могут
объединяться в группы для выполнения одной из операций в программно-
управляемом процессе передачи данных. Эти группы линий называются
шинами интерфейса. Назначение отдельных линий и шин, их номенклатура и
взаимное расположение в систем е (топологии) являются базовыми при
В отечественных и зарубежных микропроцессорных измерительно-
управляющих вычислительных системах (МП ИУВС) распространены
асинхронные мультиплексные интерфейсы с параллельным способом
передачи информации: 8 -разрядные интерфейсы Microbus; 16-разрядные
интерфейсы общая шина ( Unibus), Microbus, интерфейс микроЭВМ "Элек -
Для связи датчиков информации, исполнительных элементов, терри -
ториально удаленных от процессора на десятки и сотни метров, в МП ИУВС
В таких интерфейсах используются как параллельный, так и
последовательный способы обмена информацией. При этом последний по
причине существенног о упрощения собственно линии связи, а
следовательно, и снижения стои мости наиболее предпочтителен, если при
этом обеспечивается необходимая скорость передачи информации.
В последнее время в связи с развитием микро- и мультипроцессорных
ИУВС, отдельные м икропроцессоры или устройства ввода-вывода кото рых
могут отстоять друг от друга территориально на сотни метров (на пример,
заводская или цеховая ИУВС), все более широко применяются системные
интерфейсы или интерфейсы локальных сетей. Системный интерфейс, как
правило, имеет многоуровневую архитектуру (совокуп ность) аппаратных и
Из зарубежных локальных сетей наиболее известны DEC net фирмы
"Digital Equipment Corp", z-net фирмы " Zilog Inc", сеть фирмы IBM, Om minet
При построении ИИС, согласно ГОСТ 22316-77, должны применяться
следующие структуры соединения функциональных блоков между собой:
- цепочечное соединение, при котором единственный выход предшест -
вующего блока соединен с единственным входом последующего блока,
- радиальное соединение, при котором один блок соединен одновремен -

но с несколькими блоками, причем с каждым из них отдельной независи мой
- магистральное соединение, при котором входы и ( или) выходы
В цепочечной структуре каждая пара источник-приемник соединена
попарно линиями от выходов предыдущих Ф Б ко входам последующих,
обмен данными происходит непосредственно между бло ками или приборами.
Функции управления распределены м ежду этими устройствами. Цепочечную
структуру интерфейсов используют, как пра вило, в несложных системах с
В системе, выполненной по радиальной структуре, име ется центральное
устройство - контроллер, с которым каждая пара ис точник-приемник связана
с помощью индивидуальной группы шин. Бло ки и приборы, подключаемые к
контроллеру, могут изменять свои места при соответствующем изменении
программы работы контроллера. Под управлением контроллера происходит
обмен данными между каждым устройством и контроллером. Связи между
управляющим устройством и одни м из устройств-источников или
приемников сигналов может осу ществляться как по инициативе контроллера,
так и по инициативе уст ройств (абонентов). В последнем случае одно из
устройств вырабатывает сигнал запроса на обслуживание, а контроллер
идентифицирует запрашиваемое устройство. Ког да контроллер г отов к
обмену данными, логически подключаются цепи связи и начинается процесс
обмена. Эти цепи остаются подключенными, пока не будет передана нужная
порция информации. В цепочечной структуре каждая пара источник-прием -
ник соединена попарно линиями от выходов предыдущих ФБ ко входам
последующих, обмен данными происходит непосредственно между бло ками
или приборами. Функции управления распределены между этими
устройствами. Цепочечную структуру интерфейсов используют, как пра вило,
в несложных системах с несколькими функциональными уст ройствами.
В системе, выполненной по радиальной структуре, име ется центральное
устройство - контроллер, с которым каждая пара ис точник-приемник связана
Интерфейс — это совокупность цепей, объединяющих различные устройства, и алгоритмы, определяющая порядок передачи информации между этими устройствами.
Цепи интерфейса подразделяют на три группы: информационные, адресные и управляющие.
Различают программные и физические интерфейсы. Информация передается в виде кодов определенного числа или словами. Для различия байтов данных, команд и адресов используются осведомительные сигналы. Для инициирования передач, синхронизации работы устройств и завершения передачи служат управляющие сигналы.
Основной характеристикой интерфейса является скорость передач информации, которая зависит от алгоритма передачи и технических характеристик цепей связи.
В целях модульного принципа построения систем разработаны стандартные интерфейсы, обеспечивающие информационную, электрическую и конструктивную совместимость различных устройств.
В настоящее время используются следующие структуры интерфейсов: одноступенчатые, двухступенчатые и трехступенчатые
возможными вариантами исполнения: цепочечная, радиальная, магистральная, радиально-магистральная, каждая из которых может быть с централизованным или децентрализованным управлением (рис. 11).
Обмен информацией может быть осуществлен синхронным и асинхронным методами.
Синхронный метод передачи и приема сигналов производится в фиксированные моменты времени. Темп обмена информацией при асинхронном методе определяется сигналом квитирования. Этот метод особенно эффективен при обмене информацией с различным быстродействием функциональных блоков.
В ИИС используются следующие основные интерфейсы: КОП КАМАК, PDP-11, (общая шина), RS-232C, RS-422, RS-423, RS-485, а также системные интерфейсы 8, 16, 32-разрядных микроЭВМ.
Приборный интерфейс предназначен для взаимодействия программируемых и непрограммируемых приборов и построения на их основе измерительных информационных систем. Соединение

Рис. 11. Основные структуры интерфейсов:
а — цепочечная; б — радиальная; в — магистральная; г — радиально-магистральная

Рис. 12. Приборный интерфейс:
К — коммутатор; АЦП — аналого-цифровой преобразователь; ЦПУ — цифропе-чатающее устройство; ИКАР — интерфейсные карты
Интерфейс КАМАК. Он применяется для разветвленных систем сбора информации с большим числом первичных преобразователей и предоставляет возможность построения ИИС с двумя уровнями централизации.
Основными конструктивными элементами являются крейт модуль, стойка.
Крейт (каркас) имеет 25 станций (ячеек), в которые вставляются модули (вставные кассеты). Из них 23 станции рабочие, они служат для включения модулей, 24-я и 25-я станции отводятся для контроллера крейта (КК).
Функциональные блоки (ФБ) могут занимать произвольное расположение, так как адрес каждому ФБ присваивается после его установки в крейт.
Структурная схема системы в стандарте КАМАК представлена на рис. 13.
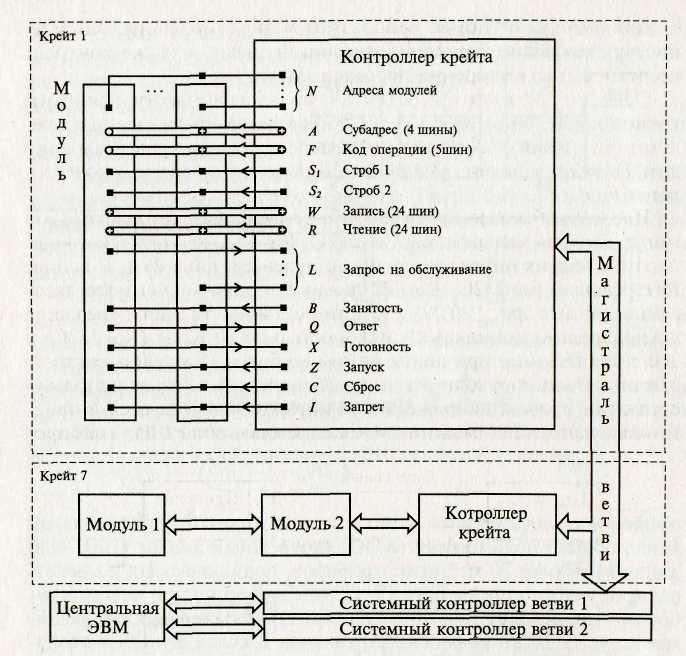
Рис. 13. Структурная схема системы в стандарте КАМАК
Магистраль крейта состоит из 81 сквозной шины, проходящей через все модули, и двух индивидуальных шин связи каждого управляемого модуля с контроллером крейта. Внутрикрейтовые связи образуют горизонтальный интерфейс системы КАМАК (Dataway). Крейты связываются между собой и с центральной ЭВМ верхнего уровня. Межкрейтовые связи проходят через контроллеры крейтов и строятся по принципам ветви (до семи крейтов вертикальный) или замкнутого кольца. Эти связи образуют интерфейс системы КАМАК (Branch highway). Структура КАМАК, таким образом, пирамидальная и включает в себя 2. 4 уровня: верхний уровень — ЭВМ; второй — контроллеры ветвей; третий — контроллеры крейтов; четвертый — управляемые модули.
Однокрейтовые системы двухуровневые.
Основной принцип, заложенный в системе КАМАК, — принцип использования центральной ЭВМ. Направления протоколов команд и информации жестко связаны.
Для защиты от помех используются экранирование, заземление, согласование характеристик линий связи, а также контроль по четности и повторение передачи кодов.
Основной недостаток системы — большая аппаратурная избыточность и наличие сложной системной части практически в каждом модуле, большая стоимость интерфейса и всей системы в целом. Поэтому стандарт КАМАК следует использовать только в сложных ИИС.
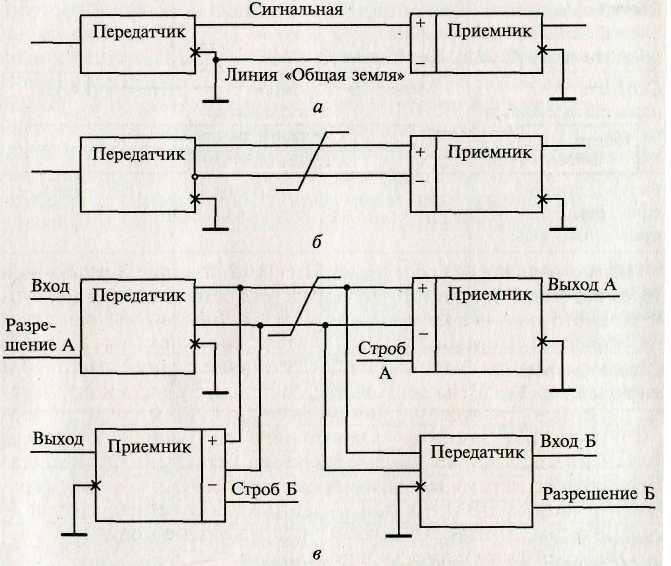
Рис. 14. Схемы однопроводной несогласованной (а) и симметричных
дифференциальных последовательных линий связи с симплексным (б)
и полудуплексным (в) режимами передачи информации
чих сигнальных проводников. Этот способ построения линии наиболее прост, но имеет существенный недостаток: на информационный сигнал накладываются помехи в линии. Так как помехи в линии пропорциональны длине линии связи и ширине полосы

рабочих частот, то в интерфейсах RS-232C и RS-423 наложены ограничения на оба параметра (см. табл.1). Например, в интерфейсе RS-423 при скорости передачи информации 3 Кбод длина линии может достигать 1200 м, а при скорости 300 Кбод — всего лишь 12 м. Кроме того, для уменьшения взаимных помех скорость нарастания фронтов передаваемых сигналов ограничивается до 30 В/мкс.
Интерфейс RS-422 распространяется на симметричные дифференциальные линии (витая пара, радиочастотный кабель), обладающие более высокими характеристиками, чем однопроводные линии. В частности, по линии интерфейса RS-422 возможна передача информации со скоростью до 100 Кбод на расстояние до 1200 м и со скоростью 10 Мбод на расстояние до 12 м. Дифференциальный режим (рис14, б) достигается применением дифференциального передатчика, согласованной линии связи (в виде витой пары или радиочастотного кабеля) и дифференциального приемника. Сигнал передатчика появляется на входе приемника в виде разностного напряжения, тогда как помехи в линии остаются синфазными. Благодаря этому дифференциальный приемник с достаточным диапазоном подавления синфазной составляющей может отличать сигнал от помехи. К тому же интерфейс RS-422 позволяет наряду с симплексным режимом передачи (см. рис. 14, б) организовать полудуплексный режим передачи (рис. 14, в) и мультиплексный режим последовательной передачи информации.
В последнем случае, применяемом для связи между периферийными устройствами микропроцессорных систем, для передачи информации в одном направлении используются две дифференциальные симметричные линии связи, например витые пары. В исходящем направлении включены один передатчик и п приемников. Такой режим позволяет обслуживать до 12 абонентов. Основные трудности заключаются в обеспечении хорошего заземления системы.
К каналу обмена информацией между отдельными функциональными блоками ЭВМ можно подключать дополнительные блоки памяти и различные устройства ввода-вывода. Такое расширение возможностей ЭВМ позволяет использовать его в ИИС, АСУТП и строить на ее базе ИВК.
Обмен информацией между функциональными блоками происходит асинхронно по каналу, который представляет собой магистраль, состоящую из 38 линий.
Под интерфейсом (или сопряжением) понимают совокупность схемотехнических средств, обеспечивающих непосредственное взаимодействие составных элементов ИИС (ГОСТ 15971-74).
Под интерфейсной системой понимают совокупность логических устройств, объединённых унифицированным набором связей и предназначенных для обеспечения информационной, электрической и конструктивной совместимости.
Стандарт (ГОСТ 26016-81 "Единая система стандартов приборостроения. Интерфейсы, признаки классификации и общие требования") включает четыре признака классификации:
- способ соединения комплектов системы (магистральный, радиальный, поперечный, комбинированный);
- способ передачи информации (параллельный, последовательный, параллельно-последовательный);
- принцип обмена информацией (асинхронный, синхронный);
- режим передачи информации (двусторонняя одновременная передача, двусторонняя поочерёдная передача, односторонняя передача).
К основным характеристикам интерфейса относятся следующие:
- структура или тип организаций связей;
- принцип обмена информацией;
- способ обмена данными;
- режим обмена данными;
- номенклатура шин и сигналов;
- количество линий для передачи данных;
- длина линий связи;
- число подключаемых устройств;
- тип линии связи.
При построении ИИС, согласно ГОСТ 22316-77, должны применяться следующие структуры соединения функциональных блоков между собой:
В ИИС и её отдельных подсистемах в зависимости от предъявляемых требований могут также применяться следующие режимы обмена данными между функциональными блоками:
- асинхронный или синхронный по командам функционального блока, принимающего данные, или специализированного управляющего функционального блока (контроллера);
- асинхронный или синхронный по запросу функционального блока, выдающего данные;
- асинхронный или синхронный, при котором данные выдаются источником самостоятельно, без поступления внешних команд.
Классификация свойств функциональных блоков, определяющих правила взаимодействия, представлена на Рис. 22.
В ИИС, имеющих жёсткую, неизменяемую структуру с постоянным составом ФБ, как правило, совместная работа ФБ обеспечивается индивидуальным сопряжением блоков друг с другом. Когда же необходимо в процессе эксплуатации изменять структуру или алгоритмы действия системы целесообразно использовать так называемые стандартные интерфейсы (ИФ).
Рис. 22. Классификация свойств функциональных блоков интерфейса.
Использование таких средств позволяет приблизить аналого-цифровое преобразование и цифровую первичную обработку информации к измерительным цепям с датчиками и наделить ИИС рядом существенных положительных качеств. Основные признаки цифровых программируемых интерфейсов приведены в табл. 12.
Таблица 12 Основные признаки программируемых интерфейсов
В централизованном ИФ осуществляется программное управление работой всех ФБ и имеется возможность изменения алгоритмов работы и состава ФБ.
В ИФ с несколькими уровнями централизации должна предусматриваться стандартизация сопряжении ФБ на каждом из этих уровней.
В ИФ с децентрализованным управлением обработка информации и обмен информацией между ФБ производится без непосредственного участия устройства управления. В системе определяются приоритеты для каждого активного ФБ и выделяется "судья" - ФБ. Обычно такую роль выполняет центральный процессор.
Система шин может быть использована для обмена как информационными, так и служебными сигналами (объединённая система шин). Но в некоторых ИФ для прохождения информационных и служебных потоков сигналов используется раздельная система шин.
Операции обмена информацией между ФБ могут выполняться последовательно либо параллельно. При последовательном выполнении таких операций для обмена информацией используется одна линия связи и происходит разделение сигналов во времени, а при параллельном - несколько линий связи.
По отношению к информационным потокам можно выделить следующие разновидности ФБ:
ФБИ - источники информации, предназначенные для выдачи информации другим ФБ системы;
ФБП - приёмники информации, служащие для получения информации от других ФБ системы;
ФБПИ - приёмники и источники информации, предназначенные для приёма и, после выполнения определённых преобразований, выдачи информации.
ФБИ, ФБП, ФБПИ могут быть активными и пассивными. Для передачи цифровой информации между ФБ возможно использовать синхронный и асинхронный методы.
При синхронной передаче сигналов в цепи ФБИ-ФБП передача и приём производятся в фиксированные моменты времени, определяемые синхронизирующими (стробирующими) импульсами. Использование синхронного обмена информацией повышает помехоустойчивость передачи информации и упрощает алгоритм действия системы.
При асинхронном методе обмен информации проводят за интервалы времени, в среднем меньшие, чем при использовании синхронного метода. Особенно эффективен асинхронный метод обмена информацией при объединении в системе ФБ, имеющих различное быстродействие.
Под конструктивной совместимостью подразумевается стандартизация в рамках системы используемых конструктивов.
Унификация питания ФБ, связанная с наличием общих источников питания на группу ФБ, существенно упрощает ФБ, но, как правило, усложняет сами источники питания.
ИФ с последовательным выполнением операций обмена информацией имеет магистральную систему шин. Наличие небольшого количества линий связи позволяет выполнить их с улучшенной защитой от влияния помех. Последовательные ИФ могут быть выполнены с разомкнутой или замкнутой (петлевой) магистралью, с одноступенчатой или многоступенчатой адресацией объединяемых ФБ.
Приборный стандартный интерфейс обеспечивает работу системы с одним уровнем централизации, имеет раздельные информационные шины и шины управления, относится к ИФ с магистральной системой шин, реализует байт-последовательный, бит-параллельный обмен информацией, объединяет ФБИ, ФБП, ФБПИ, использует асинхронный метод передачи информации
Магистральная система шин (магистраль) обеспечивает параллельное соединение всех ФБ и состоит из трёх групп шин: информационные шины, шины управления передачей данных, общее управление.
Шины управления передачей данных используются для организации асинхронного обмена информацией между ФБП и ФБИ.
Зарубежными фирмами выпускается относительно большое количество различных устройств, основанных на использовании приборного ИФ, а также ФБ с соответствующими устройствами сопряжения.
По сравнению с последовательным приборный ИФ позволяет получать существенно большую скорость обмена информацией. В то же время, использование асинхронного обмена информацией позволяет объединить ФБ, имеющие различное быстродействие.
Интерфейс КАМАК (САМАС- Computer Application for Measurement and Control) предусматривает возможность построения систем с двумя и более уровнями централизации; раздельные системы шин для информационных и управляющих потоков; магистральную систему шин, работающую совместно с несколькими радиальными шинами, связывающими все ФБ с ФБЦ; параллельный порядок выполнения операций обмена информацией; объединение активных ФБЖ; синхронный обмен информацией; работу с любой ЭВМ; унификацию конструкции; унификацию питания.
Первая ступень централизации управления и обработки информации обеспечивается в крейте, а вторая - в ветви, которая может объединять до семи крейтов.
ЛЕКЦИЯ 11
Читайте также: