
Узлы обеспечивающие устойчивость экипажа при движении в кривой кратко
Обновлено: 18.05.2024
Используя метод кинетостатики, покажем уравновешенную систему сил, включающих в себя кроме реальных сил, действующих на экипаж (сила тяжести, опорные реакции, направляющая сила), также и силу инерции – центробежную силу С. В расчёте на одну тележку эта сила равна
где - количество тележек,
- количество осей одной тележки.
Момент центробежной силы вызывает изменение опорной реакции: реакция от наружной рельсовой нити Rн увеличивается, а реакция от Rв от внутренней рельсовой нити уменьшается. В пределе при опрокидывании вагона вокруг наружнего рельса Rв будет равно нулю. Опрокидывающий момент
Если для обеспечения устойчивости принять коэффициент запаса равным 2, чтобы восстанавливающий момент минимум в 2 раза превышал опрокидывающий, то
где - возвышение наружного рельса, м;
- высота центра масс локомотива над уровнем осей колёсных пар, м;
- Расстояние между кругами катания колёс, м
Высота расположения центров масс кузова
где - высота центра масс кузова над уровнем осей колёсных пар, м;
- диаметр бандажа локомотива, м.
Высота расположения центров масс тележки
где - высота центра масс подрессоренных частей тележки над уровнем осей колёсных пар
Высота расположения центров масс неподрессоренных масс колёсных пар
где m к - масса кузова, т;
mнп - масса неподрессоренных частей в расчете на одну колёсную пару, т;
mр – масса рамы тележки, т;
mд - масса тягового двигателя, т
Максимально допустимое по устойчивости от опрокидывания центростремительное ускорение
В кривой без возвышения
Максимально допустимая по устойчивости от опрокидывания центростремительная скорость
В кривой без возвышения
Для экипажа, движущегося в кривой с возвышением наружного рельса, система сил показана на рисунке 3.1.
Рисунок 3.1. Расчётная схема движения локомотива в кривой
Силы, действующие на тележку при движении в кривой
При входе в кривую на переднее колесо со стороны наружного рельса начинает действовать направляющее усилие У1, которое вынуждает экипаж двигаться по окружности вокруг центра кривой О (рисунок 3.2). Экипаж, двигавшийся с линейной скоростью v , начинает вращаться вокруг точки О с угловой скоростью
Величины и направления абсолютных скоростей всех точек тележек будут различны. Для дальнейших расчётов удобно представить абсолютную скорость каждой точки как сумму переносной и относительной скоростей. Нам известна величина и направление скорости v в точке Ω. Тогда можно выразить абсолютную скорость точки А как векторную сумму переносной скорости
Абсолютная скорость v абс любой точки тележки, в частности центра переднего внутреннего колеса А, направлена перпендикулярно радиусу, проведённому из центра О в данную точку, и равна по величине.
где - радиус вращения точки А.
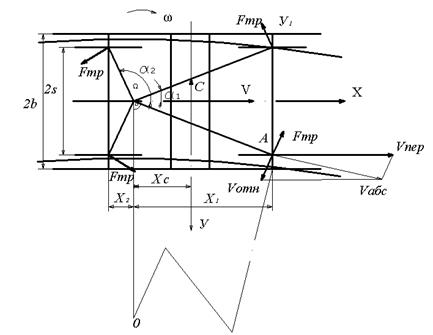
Рисунок 3.2. Схема сил, действующих на тележку в кривой
Все точки тележки, в том числе и центры колёс, имеют переносную скорость, равную v . Тележка движется по рельсам, и перемещение её вдоль продольной оси со скоростью v осуществляется за счёт качения колёс. Вторая составляющая абсолютной скорости – относительная скорость – по своему направлению не совпадает с плоскостью круга катания. А это означает, что движение колеса в этом направлении осуществляется за счёт проскальзывания.
Таким образом, абсолютную скорость каждого колеса можно представить как векторную скорости качения и скорости скольжения во вращательном движении вокруг полюса Ω. Качение колёс не сопровождается заметным сопротивлением, в то время как проскальзывание колёс по рельсам во вращательном движении тележки вокруг полюса Ω сопровождается действием сил трения Fтр. Качение колёс не сопровождается заметным сопротивлением, в то время как проскальзывание колёс по рельсам во вращательном движении вокруг полюса Ω сопровождается действием сил трения Fтр в опорных точках колес, препятствующих проскальзыванию.
Задача о силах, действующих на тележку при движении в кривой, рассматривается с рядом упрощений. Так, коэффициенты трения под всеми колёсами приняты одинаковыми и постоянными; учитывается только горизонтальная составляющая силы трения, определяемая вертикальной нагрузкой на колесо.
Направление и величины внешних сил, приложенных к тележке, определяют её положение относительно рельсов. При невысоких скоростях и соответственно небольших значениях силы С действие момента сил трения может заставить тележку двигаться по кривой в положении наибольшего перекоса, т.е. задняя колёсная пара касается гребнем колеса головки рельса внутренней нити. Полюс Ω максимально удалён от центра тележки; полюсное расстояние рассчитывается по формуле
где Δ – суммарный зазор для колёсной пары в кривой заданного радиуса;
для ρ ≥350 м, Δ=14 мм.
для ρ= 349-300 м, Δ=24 мм.
для ρ≤ 299, Δ=34 мм;
2а - база тележки (задание)
С ростом скорости тележка будет стремиться к хордовой установке, т.е. задняя колёсная пара, пройдя через промежуточные положения, при определённой скорости прижмётся к наружному рельсу. В этом случае полюс Ω окажется точно посередине экипажа, а полюсное расстояние хс=0.
При промежуточной установке тележки (0
© 2014-2022 — Студопедия.Нет — Информационный студенческий ресурс. Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав (0.01)
При проходе кривых участков пути возможна аварийная ситуация, связанная с опрокидыванием экипажа как наружу, так и внутрь кривой. Рассмотрим условия, при которых может произойти опрокидывание.
Центробежная сила, действующая наружу кривой и направленное туда же давление ветра стремятся опрокинуть экипаж наружу кривой. При этом происходит обезгрузка колес на рельсе внутри кривой. Опрокидыванию препятствует сила тяжести, а также ее горизонтальная реакция рельса, обусловленная возвышением наружного рельса.
С другой стороны, может произойти и опрокидывание внутрь кривой. Это возможно при низких скоростях движения в результате возвышения наружного рельса и давления ветра, направленного внутрь кривой, а также при действии растягивающих продольных сил в автосцепках (в режиме тяги). При этом происходит обезгрузка колес на внешнем рельсе. Сила тяжести препятствует опрокидыванию.
Оценка устойчивости производится по формуле:

, (2.19)
где РСТ – статическая вертикальная сила давления колеса на рельс с учетом обезгрузки от вертикальных составляющих сил в автосцепках;
РДИН – аналогичная динамическая вертикальная сила;
[Kус] – допускаемый запас устойчивости от опрокидывания.
Силы РСТ и РДИН выражаются следующим образом:

(2.20)

, (2.21)
где GВ – сила тяжести вагона;

вертикальная составляющая продольной силы, действующей на кузов вагона через автосцепку;

; (2.23)
n – количество осей экипажа;
FK, FT – центробежные силы, действующие на кузов и тележку, соответственно;
FВК, FВТ – силы давления ветра на кузов и тележку, соответственно;
РВ – давление ветра;
SВ, ST – площади ветровой поверхности кузова и тележки, соответственно;

поперечная составляющая продольных сил, действующих через автосцепки;

; (2.26)
2Lсц – длина вагона по осям сцепления автосцепок;
R – радиус расчетной кривой;
mК, mТ – массы кузова и тележки, соответственно;
N – продольная квазистатическая сила в автосцепке;
hцр, hЦТ – расстояния от уровня головки рельса до центров масс кузова и тележки, соответственно;
hВК, hВТ – расстояния от уровня головки рельса до линий действия равнодействующей сил давления ветра на кузов и тележку, соответственно;
ha – расстояние от уровня головки рельса до продольной оси автосцепок;
ΔК, ΔТ – горизонтальные перемещения центров масс относительно центральной вертикальной оси поперечного сечения экипажа для кузова и тележки, соответственно.
Расчеты производятся для двух режимов с учетом наиболее неблагоприятных условий:
- опрокидывание наружу груженого экипажа в режиме торможения;
- опрокидывание внутрь порожнего экипажа в режиме тяги.
Выполнение расчетов.
1. Определяется общие исходные данные в следующей последовательности:
n – по Приложению Б, стр. 15;
масса тележки mт – см. Приложение Б, стр. 2;
hр – возвышение наружного рельса (Приложение Б, стр. 16);
2s – ширина колеи (Приложение Б, стр. 6);
g = 9,81 м/с 2 ;
2Lсц – см. Приложение А, стр. 4;
Δh – см. Приложение Б, стр. 9;
а – см. Приложение Б, стр. 10;
РВ – см. Приложение Б, стр. 17;
SВ - см. Приложение А, стр. 5;
ST – см. Приложение Б, стр. 18;
FВК – по формуле (2.24);
FВТ – по формуле (2.25);
hЦТ – см. Приложение Б, стр. 19;
hВК – см. Приложение Б, стр. 21;
hВТ – см. Приложение Б, стр. 20;
ha – см. Приложение Б, стр. 22;
ΔК - см. Приложение Б, стр. 23;
ΔТ - см. Приложение Б, стр. 24.
2. Выполняется расчет для случая опрокидывания наружу кривой (режим сжатия).
Определяются следующие данные:
N = 1·10 6 Н;
mК принимается равным массе m из раздела 1.1.1;
GВ вычисляется по формуле (2.22);
по формуле (2.23);
РСТ – по формуле (2.20).
Определяются исходные данные:
V – по Приложению А, стр. 12;
Вычисляютсяцентробежные силы по формулам:

; (2.27)

. (2.28)
Далее определяются величины:

- по формуле (2.26);
hцр – по Приложению А, стр. 18;
РДИН – с помощью выражения (2.21).
Наконец, производится оценка устойчивости по неравенству (2.19), в котором принимается [Kус]=1,5.
3. Выполняется расчет для случая опрокидывания внутрь кривой (режим растяжения).
Определяются исходные данные:
N = 0,8·10 6 Н;
mК принимается равной тары T;
GВ вычисляется по формуле (2.22);
по формуле (2.23);
РСТ – по формуле (2.20).
Определяются исходные данные:
V – по Приложению А, стр. 12;
Вычисляютсявеличины по формулам:

; (2.29)

(2.30)
- по формуле (2.26);
hцр – по Приложению А, стр. 19;
РДИН – с помощью выражения (2.21).
Затем окончательно производится оценка устойчивости по неравенству (2.19), в котором следует принять [Kус]=1,2.
Заключение
1. В соответствии с заданием в курсовой работе выполнен анализ собственных вертикальных колебаний кузова на рессорах: подпрыгивания, галопирования и боковой качки. Определены собственные частоты и периоды колебаний.
2. Рассчитаны параметры гасителя колебаний, указанного в задании.
3. Исследованы вынужденные колебания экипажа на вертикальной неровности пути.
4. Определены динамические характеристики кузова экипажа.
6. Выполнена проверка устойчивости колес против схода с рельсов при действии боковых сил. Условие устойчивости выполнено.
7. Проверена и подтверждена устойчивость колес против схода с рельсов под действием продольных сил.
8. Оценена устойчивость экипажа от опрокидывания в кривой для двух режимов: наружу и внутрь. Условие в обоих случаях выполняется.
Список использованных источников:
1. Вершинский С.А., Данилов В.Н., Хусидов В.Д. Динамика вагонов - М.: Транспорт, 1991.
3. Котуранов В.Н., Козлов М.П. Технологическая последовательность экспертных оценок рабочих качеств универсального грузового вагона (на примере цистерны модели 15-1443). Учебное пособие. – М.: МИИТ, 2013, – 145 с.
4. Нормы расчета и проектирования грузовых вагонов железных дорог колеи1520 мм Российской Федерации. ФГУП ВНИИЖТ – ФГУП ГосНИИВ, М., 2004г.
Приложение А. Исходные данные по вариантам задания
| № | Параметр Вариант задания | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 |
| 1 | Тара экипажа T, кг | 21900 | 21900 | 22700 | 22700 | 21000 | 22200 | 21400 | 32000 | 21400 | 22700 |
| 2 | Грузоподъемность P, кг | 62000 | 62000 | 62000 | 62000 | 50000 | 63000 | 62000 | 50000 | 50000 | 60000 |
| 3 | База экипажа 2l, м | 9,83 | 9,83 | 10,0 | 10,0 | 5,81 | 8,66 | 9,72 | 12,13 | 7,12 | 7,12 |
| 4 | Общая длина экипажа 2Lсц, м | 14,73 | 14,73 | 14,73 | 14,73 | 10,03 | 13,92 | 14,62 | 18,074 | 12,02 | 12,02 |
| 5 | Площадь боковой поверхности кузова (ветрового “паруса”) S в, м 2 | 39,5 | 39,5 | 50 | 50 | 25 | 30 | 32 | 59 | 27 | 31 |
| 6 | Высота центра ветровой поверхности кузова относительно центра колес hв, м | 1,93 | 1,93 | 2,2 | 2,2 | 1,87 | 1,8 | 1,7 | 1,7 | 2,11 | 2,22 |
| 7 | Тип гасителя колебаний | с постоянной силой трения | с силой трения, пропорциональной прогибу | с силой трения, пропорциональной прогибу | с силой трения, пропорциональной прогибу | с постоянной силой трения | с постоянной силой трения | гидравлический | гидравлический | гидравлический | с силой трения, пропорциональной прогибу |
| 8 | Использование грузоподъемности экипажа a | 1 | 1 | 1 | 1 | 1 | 0,4 | 0,5 | 0,7 | 0,6 | 0,8 |
| 9 | Высота центра тяжести кузова с грузом над уровнем рессорного подвешивания hц, м | 1,9 | 1,8 | 2,2 | 2,1 | 1,87 | 1,2 | 1,25 | 1,80 | 1,70 | 2,0 |
| 10 | Момент инерции экипажа относительно продольной оси Ix, кг·м 2 | 3,77·10 5 | 3,77·10 5 | 4,64·10 5 | 4,64·10 5 | 2,85·10 5 | 1,6·10 5 | 1,8·10 5 | 1,9·10 5 | 1,8·10 5 | 3,5·10 5 |
| 11 | Момент инерции экипажа относительно поперечной оси I y, кг·м 2 | 15,1·10 5 | 15,1·10 5 | 16,8·10 5 | 16,8·10 5 | 7,4·10 5 | 9,5·10 5 | 11·10 5 | 6,5·10 5 | 5,8·10 5 | 10·10 5 |
| 12 | Скорость движения экипажа V, м/с | 28 | 28 | 22 | 28 | 22 | 20 | 28 | 17 | 20 | 25 |
| 13 | Длина периода неровности пути lн, м | 3 | 3,5 | 4,6 | 2,8 | 3,2 | 6,25 | 12,50 | 12,50 | 4 | 12,50 |
| 14 | Амплитуда неровности пути hн, м | 0,008 | 0,006 | 0,0055 | 0,007 | 0,009 | 0,008 | 0,006 | 0,012 | 0,005 | 0,013 |
| 15 | Амплитуда вертикальных колебаний кузова fД, м | 0,014 | 0,014 | 0,014 | 0,014 | 0,014 | 0,005 | 0,007 | 0,011 | 0,011 | 0,012 |
| 16 | Вертикальная сила, действующая от колеса на рельс РВ, Н | 2,15·10 4 | 2,15·10 4 | 2,15·10 4 | 2,15·10 4 | 2,15·10 4 | 0,65·10 4 | 1,12·10 4 | 1,86·10 4 | 1,86·10 4 | 1,92·10 4 |
| 17 | Боковая сила, действующая от колеса на рельс РБ, Н | 1,08·10 4 | 1,08·10 4 | 1,08·10 4 | 1,08·10 4 | 1,08·10 4 | 0,39·10 4 | 2,1·10 4 | 0,75·10 4 | 0,75·10 4 | 0,93·10 4 |
| 18 | Высота центра масс кузова с грузом над уровнем головки рельса hцр, м | 2,4 | 2,3 | 2,7 | 2,6 | 2,4 | 1,7 | 1,8 | 2,3 | 2,2 | 2,5 |
| 19 | Высота центра масс порожнего кузова над уровнем головки рельса hцр, м | 2,55 | 2,55 | 2,9 | 2,9 | 2,55 | 2,55 | 2,55 | 2,55 | 2,55 | 2,55 |
Приложение Б. Исходные данные по экипажам, общие для всех вариантов задания
+Кузов, тележка(подресоренная часть), КП(неподрес часть). Неподрессоренная масса – жёстко воздействует на путь. Подшипниковый узел, тяговый привод, РП(букса ступ и кузовная), Узлы передачи прод и попереч F.
Основные задачи исследования динамики ПС.
+Наилучшие динамические св-ва экипажа, устойчивость движения экипажа в рельсовой колее,выполение всех требований ПДК.
Основные дин. хар-ки ПС.
+ПС представляет собой систмему физ. Тел и связей между ними. Твёрдые тела(кузов, тележка,КП). Хар-ся массой, моментом инерции и координатами центра тяжести.
Подрессоренная часть ПС.
+Служит для передачи всех вертикальных, продольных и поперечных сил между кузовом и КП.
Неподрессоренная часть ПС.
+ Передача нагрузок оси ПС на путь, создание силы тяги и торможения, направление ПС в рельсовой колее.
Момент инерции тела.
+Физ величина, характеризующая инертность во вращательных движениях вокруг оси, подобно тому как масса тела является мерой его инертности в поступательном движении.
Диссипативные(демпфирующие) элементы.
+Эл-ты деформации, которых сопровождают рассеиванием энергии, обусловленные действием сил поверхностного внутреннего трения.
От чего зависит сила упругости в упругих элементах связей и как оперд?
+Упругие элементы передают силы воздействующие между определёнными элементами, уменьшают их относительные перемещения. Хар-ка – жёсткость.
От чего зависит сила диссипации в дисипативных эл-тах.
+Зависит от скорости поршня и коэф-та вязкости трения.
Что такое коэф-т вязкого трения.
+Гл.хар-ка гидр.гасит.диссипативного.гасителя колебаний. Сила,ктр нужно приложить к поршню, для его перемещения со скорости 1м/с.
Фрикционный диссипативный элемент.
+Силы сопротивления колебаний создаются за счёт трения, каких-либо элементов гасителя.
Что такое колебания?
+Колебания представляют собой ограниченные движения, определяющиеся степенью повторяемости и происходящие относительно среднего расстояния для ПС.
Что такое частота колебаний?
Какие виды колебаний ПС могут присутствовать при движении по пути.
+Вертикальные(галоп и подпр), продольные(подергивание, встряска) и боковые(виляние, боковая качка)
Свободные и вынужденные колебания.
+Свободные при однократном воздействие внешнего возмущения и вынужденные при постоянном воздействии( типо стык рельс).
Установившиеся и неустановившиеся колебания.
+Уст – при движении ПС с пост V по прямому участку пути и неуст – возникают при переходных режимах(вход—выход из кривой, троганье, разгон, подъём, спуск).
Основные элементы ВСП.
+Рельс, шпала, балластный слой, основная площ. Зем. Полотна.
Какая хар-ка пути является основной?
Эквивалентная геометрическая неровность пути.
+ Приближённо учитывает все причины, вызывающие появление колебаний ПС.
Какими моделями описываются динамические св-ва пути.
+Инерционные хар-ки, хар-ки элементов соединения, геометрические размеры.
Как классифицируются возмущения, вызывающие колебания.
+Кинематические, параметрические, силовые.
На какие группы подразделяются геометрическая неровность пути.
+Рифли Lн 0,03 – 0,08. Короткие 0,08 – 0,3. Длинные 0,3 – 3 м.
Сущность принципа Даламбера.
+ Если к действующей на тело активной силы и реакции связи приложить дополнительную систему инерции, то тело будет находиться в равновесии. Сумма всех сил, действующих в системе, дополненная главным вектором равна 0.
Что понимается под силой инерции?
+Сила инерции определяется, как масса, умноженная на ускорение, и направленная в противоположную сторону ускорению. При поступательном движении на тело действуют силы инерции, а при вращательном момент инерции.
Динамическая модель ПС.
+Механическая часть ПС, описанная системой диференциальных уравнений.
Какими параметрами хар-ся дин. модели ПС.
+Масса подрессоренной части и неподресс(кп), жёсткая база тележки, коэф эквивалентного вязкого трения РП, момент инерции подр части, верт жёсткость буксового РП, коэф эквив вяз трения, приведённаяя масса пути.
Что такое число степеней свободы.
+Число доп связей, ктр нужно наложить на систему, чтобы сделать равным нули все возможные перемещ.
Что называют обобщёнными координатами дин.мод.
+Параметры, ктр описывается число степеней свободы.
Какой координатой хар-ся колебания модели с одной степенью свободы.
+Координатой Z – вертикальные перемещения.
Какими обобщёнными координатами хар-ся колебания модели на упругом пути.
Уравнение колебания модели с одной степенью свободы.
Какие колебания позволяет исследовать плоская модель двуосного экипажа.
+Вертикальные (подпрыгивание и галопирование)
Что такое транспортное запаздывание.
+Это время, через которое неровность 2, повторяет неровность 1, определяемой поступательной скоростью движения модели и жёсткой базой тележки.
Как определяются прогибы рессорных подвешиваний при наличии двух видов колебаний?
В каком случае динамическую сист. Называют диссипативной и консервативной.
+Система в ктр энергия расходуется на преодоление сопротивления среды – диссипативная. Энергия не рассеивается – консервативная.
Как определяется собственная частота недемпфированной системы.
Что такое коэф-т относит и крит затух.
+ Крит- система перестёт быть колеб.
42) n 1 – случай большого сопротивления в системе.
Как влияет жёсткость РП на частоту собственных колебаний.
Что позволяет иследовать одноосная модель с двумя степенями свободы.
+Исследование совместных колебаний подпрыг кузова и тележки при движении по абсолютно жёсткому пути с неровностями.
Уравнение колебаний одноосной модели с двумя степенями свободы.
Что такое парциальная частота колебаний.
+ Парциальной системой называется система, полученная из исходной при закреплении всех обобщенных координат кроме одной, частоту по этой координате и называют парциальной частотой.
Основное отличие вынужденных колебаний от свободных.
+ Вынужденные колебания -вызванные внешним возбудителем, параметры таких колебаний зависят от скорости движения и от характеристик возбудителя (рельсовый стык, волнообразный износ головки рельса и т. д.)
.Свободные колебания -возникают в демфированных системах, параметры их зависят от массы, жесткости и коэффициента затухания гасителя колебаний.
От каких параметров зависит частота вынужденных колебаний.
Динамический коэф-т передачи.
Резонанс?
+ Совпадение частот собственных и вынужденных колебаний. Чтобы снизить, надо уменьшить колеб.
Биение.
+Возникает при наличии двух гармонических колебаний с 1ой и той же амплитудой, но отличительной частотой.
Основная задача частотного метода при исследовании колебаний.
+ При исследовании колебаний частотным методом основной задачей является получение аналитического выражения колебательного процесса при движении по пути с аналитически заданным возмущением на ПС
Каким образом находят частотную хар-ку дин.сист?
+ Для получения ЧХ необходимо иметь уравнения колебаний модели и преобразовать их таким образом, чтобы левая часть содержала полином, описывающий собственные колебания, а правая полином описывающий возмущающие воздействия. ЧХ системы будет представлять собой отношение полинома правой части к полиному левой.
Что такое ЧХ связей?
+ ЧХ системы показывает, каким образом динамическая система преобразует по амплитуде и фазе входные обобщенные силы в обобщенные координаты
Как определить АЧХ и ФЧХ Дин.сист?
+Нужно отделить вещественную часть от мнимой.
Что показывает АЧХ и ФЧХ?
АЧХ/ФЧХ показывает, как динамическая система преобразует амплитуду/фазу входного воздействия (возмущения) в зависимости от частоты.

Цель работы - определение угла наклона кузова и скорости начала опрокидывания экипажа при движении в кривой, и влияние на их величины основных параметров экипажа и пути.
Расчётная схема экипажа и действующих на него сил представлена на рис. 1.
– подрессоренная масса экипажа, т:
где - подрессоренная масса экипажа, отнесенная к одной оси, т;
- число осей экипажа;
- жёсткость одной стороны рессорного подвешивания экипажа, кН/м;
- статический прогиб рессорного подвешивания, м;
- высота центра тяжести надрессорного строения от верхней плоскости рессорного подвешивания, м;
- угол наклона надрессорного строения, рад;
- расстояние между осями рессорных комплектов в поперечной плоскости, м.
При расчётах принять м;
- центробежная сила инерции, возникшая при движении экипажа по кривой, кН;
P – реакции рессорного подвешивания, вызванные наклоном надрессорного строения на угол .
Из приведённой на рис.1 схемы следует, что при движении в кривой на подрессоренную часть действует опрокидывающий момент:
Этому моменту противодействует восстанавливающий момент реакций рессорного подвешивания:
Условием равновесия надрессорного строения является равенство:
Преобразуя выражение, получим:
Очевидно, устойчивость экипажа против опрокидывания будет обеспечена при условии:
Масса локомотива разделяется на подрессоренную и иеподрессореииую. К неподрес-соренным массам относят массу колесной пары с буксами, часть массы рессорного подвешивания первой ступени (примерно 2/з), около половины массы тягового электродвигателя при опорно-осевом его подвешивании (двигатель опирается одним концом на ось колесной пары, а другим - на раму тележки). Не-подрессорениая масса, приходящаяся на одни колесио-моториый блок у тепловозов с опорно-осевой подвеской двигателя (тепловозы 2ТЭ10Л, 2ТЭ10В, ТЭМ2 и др.), составляет 4,5-4,6 т. У тепловозов с опорио-рамиым подвешиванием двигателя (двигатель закреплен на раме тележки и значит подрессорен) ие-подрессорениая масса составляет 2,5-2,7 т. При движении тепловоза его подрессоренные н неподрессореиные массы совершают колебания относительно рельсового пути. Причем колебания колесных пар (иеподрессорениых масс) происходят самостоятельно, независимо от колебаний всего экипажа.
В зависимости от направления возмущающих сил колебания экипажа могут вызывать сложные его перемещения в пространстве. У тепловозов различают следующие основные виды колебаний: подпрыгивание, галопирование, поперечная качка, виляние и боковой относ.
Подпрыгивание (перемещение вверх и вниз) совершается под действием периодически изменяющихся вертикальных сил (рис. 171, а), вызывающих колебательное движение надрессорного строения относительно колесных пар. Галопирование (колебание надрессорного строения вокруг поперечной оси у, проходящей через центр тяжести тепловоза) вызывается (рис. 171, б) неодинаковым прогибом рессорного подвешивания передней и задней тележек. Поперечная (боковая) качка (колебания экипажа тэокруг продольной оси х экипажа (рис. 171, в) возникает вследствие разного по знаку прогиба рессорного подвешивания на одной и другой сторонах тепловоза. Виляние (поперечное перемещение и одновременно вращательное движение относительно вертикальной осн тепловоза в зазорах между колесами и рельсами) возникает вследствие извилистого движения колесной пары, вызываемого коиичиостью бандажей, и попеременного воздействия упругих сил со стороны рельсов на колеса каждой колесной пары. Боковой относ (смещение экипажа в поперечном направлении) вызывается действием центробежных сил (иногда и сильного ветра).
Колебания локомотива приносят много вреда. Сопровождающие колебательный процесс чрезмерные динамические нагрузки расстраивают путь, нарушают плавность хода, а иногда могут вызывать сход экипажа с рельсов. Воспринимаемые экипажем динамические нагрузки вредно отражаются на работе тягового оборудования, ухудшают условия труда локомотивной бригады.
Основными параметрами (характеристиками) всех колебательных процессов являются: массы, участвующие в колебательном процес-
Рис. 171. Основные виды колебаний локомотива:
о - подпрыгивание; б - галопирование; в -- поперечная качка

се, размах (амплитуда) колебаний и частота или период колебаний. Количественные показатели этих параметров для колеблющихся в вертикальном направлении подрессоренных масс характеризуют вертикальную динамику локомотива. Вертикальная динамика локомотива считается хорошей, если он имеет плавный ход во всем диапазоне скоростей, т. е. оказывает наименьшее динамическое воздействие иа путь, обеспечивает минимальную утомляемость локомотивных бригад. Горизонтальную динамику характеризуют силы, действующие на рельсы и экипаж в горизонтальной плоскости при прохождении кривых и прямых участков пути, а также поведение экипажа в рельсовой колее (виляине, поперечные броски кузова и т. д.).
Возникающие при колебаниях силы растут с увеличением скорости. Во избежание их чрезмерного роста, при котором создается угроза безопасности движения, следует снижать скорость тепловоза. Для установления допускаемой скорости движения в прямых и кри-иых участках пути необходимо иметь представление о действующих иа колесные пары силах в вертикальной и горизонтальной плоскостях.
Таким образом, динамические силы в контакте между колесом н рельсом зависят от неподрессореиных масс и скорости движения тепловоза. Значение динамических сил зависит также от характера неровностей. При движении по коротким неровностям (длина менее 200 мм) на рельсовых стыках динамические силы имеют ударный характер. При длинных неровностях эти силы имеют безударный (инерционный) характер. Наиболее пагубное воздействие на рельсы оказывают ползуны на бандажах колесных пар, получившиеся в результате заклинивания их при торможении. При наличии ползуна движение колес сопровождается ударами, которые могут привести к излому рельсов и бандажа. Поэтому правилами технической эксплуатации строго ограничивается размер ползуна н скорость следования тепловоза до ближайшего депо. Расчеты показывают, что критическая скорость тепловоза, обусловленная безотрывным качением колес с ползуном, равна 19 км/ч. При этом ударная сила в контакте ползуна с рельсом составляет около 180 кН. Эта сила с увеличением скорости возрастает мало, однако для обеспечения безопасности движения тепловоз должен следовать до депо одиночным порядком со скоростью не более 15 км/ч.
В равной степени динамические нагрузки передаются от рельса к колесу, а от колеса через рессорное подвешивание надрессориому строению тепловоза. Чем мягче рессорное подвешивание, тем меньшая сила будет передаваться кузову, соответственно меньшее ускорение будет иметь ои по отношению к ускорениям колеса, тем с меньшей скоростью будет колебание кузова. Время колебания кузова (период колебания) не зависит от скорости движения. Оно зависит только от характеристик рессорного подвешивания. Полученный колесом со стороны рельса импульс силы (толчок, удар) благодаря рессорному подвешиванию передается надрессориому строению резко смягченным со значительным опозданием. В этом состоит главное назначение рессорного подвешивания - удлинить время воздействия на надрессорное строение толчков и ударов, получаемых со стороны пути.
Критическая скорость и гашение колебаний. Катящиеся по рельсам колеса получают толчки и удары с частотой, зависящей главным образом от периодичности повторения рельсовых стыков. Эту частоту называют частотой вынужденных колебаний. Кузов же колеблется с частотой собственных свободных колебаний, которая зависит от статического прогиба рессорного подвешивания под нагрузкой
Статический прогиб 1ст, приведенный в этой формуле, измеряется в сантиметрах; получаемая частота выражается в герцах (числом колебаний в секунду).
В случае совпадения частот вынужденных и собственных колебаний наступает явление резонанса, при котором резко возрастают амплитуды колебаний кузова, а значит и динамические силы. Скорость, при которой наступает резонанс, называют критической. Она подсчи-тывается по формуле акр = 3,6£/ст где L - длина рельсовых звеньев, м.
Таким образом, чем больше длина рельсовых звеньев н статический прогиб рессорного подвешивания, тем выше критическая скорость. Конструкционная скорость тепловоза выбирается обязательно меньше критической. Неровности иа рельсах могут иметь место ие только иа стыках, поэтому явление резонанса может наступить при скорости значительно ниже критической.
Во избежание резонансных явлений колебания рессорного подвешивания необходимо гасить (затормаживать). Для этой цели существуют специальные устройства, называемые гасителями колебаний или демпферами. В рессорном подвешивании, где применены листовые рессоры, дополнительные устройства для гашения колебаний обычно не требуются, так как рессора совмещает в себе одновременно упругий элемент и демпфер.
Ускорение колеса при движении по неровности пути. Одним из характерных и удобных параметров для определения динамических сил в контакте между колесом и рельсом является ускорение ш„ колеса в вертикальном направлении.
При движении колеса по неровности ускорение зависит не только от ее характера, ио также и от упругости рельсового пути. На длинных неровностях ускорения вследствие упругости пути могут возрасти в 2-3 раза. Напротив, прн движении по коротким неровностям ускорения колеса иа жестком рельсе могут оказаться выше, чем на упругом. ВНИИЖТом предложена эмпирическая формула для вертикальных ускорений колес на стыках:
сок=/2 + 0,13 з ° \ ц.
\ 1(2 (реакции рельса) на силу трения Р между бандажом и рельсом.
зопасное следование локомотива в кривой. Основными оценочными критериями при движении локомотива в кривой являются следующие величины: боковое усилие колес на внутреннюю грань головки рельсов, упрцгое отжатие рельсов под действием этого усилия и радиальное ускорение. Допускаемая величина бокового усилия находится из условия надежного не-всползаиия гребня набегающего колеса иа рельс. Гребни баидажей, направляющие движение колес в рельсовой колее, имеют угол наклона по отношению к подошве рельса у = 70° (рис. 176, а). В точке контакта колеса с рельсом боковое усилие' Y- и нагрузка колеса на рельс П вызывают появление нормальной силы Лг. Сила трения в точке контакта, препятствующая скольжению колеса по наклонной плоскости вниз, равна Nfrp, где 1Тр - коэффициент трения скольжения баидажа о рельс. Вертикальная составляющая этой силы равна Nf TVs\n\. Подъем колеса над головкой рельса облегчается тем, что при положительном угле набегания р. (когда гребень колеса в своем движении стремится пересечь головку рельса) точка .4 контакта гребня направляющего колеса с боковой гранью рельса находится несколько впереди (на размер а) точки Б контакта круга катания бандажа (двухточечный контакт) (рнс. 176,6). При этом колесо, прижимаемое боковым усилием к рельсу, будет стараться всползти на рельс наклонной поверхностью гребня за счет наличия сил трения. Безопасность движения будет надежно обеспечиваться только тогда, когда приподнявшийся гребень колеса имеет возможность соскальзывать вниз. Отношение Y 1П обычно называют критерием безопасности. Это отношение не должно быть больше 0,8. Этот критерий не учитывает боковую упругость рельсов, которая коренным образом может изменить условия всползаиия. Как показывает практика, случаи схода колес с рельсов чаще бывают не от всползаиия, а от потери устойчивости рельсов и расшивки пути из-за значительных боковых усилий. В связи с этим более важным критерием безопасности при движении локомотива в кривой является упругое отжатие наружного рельса у. допускаемая величина которого для рельсов типа Р50 равна 6,5 мм, для Р65 - 6 мм и для Р75 - 5 мм. Превышение этих значений может привести к постепенному
Накоплению остаточных 01жягий, расшивке п«-ти и сходу экипажа с рельсов.
Рельсовая кривая имеет различные неровности в плане, поэтому движение локомотива в кривой имеет динамический характер. Возникающие динамические силы учитываются коэффициентом горизонтальной динамичности. Его величина зависит от скорости движения локомотива, а также от наличия поперечной упругости у связи колесных пар с рамой тележки. Применение упругих упоров в буксач, а также буксовых поводков с резиновыми элементами снижает на 25-30 % динамические горизонтальные силы, а значит и упругое от-жатие.
Рассмотренные выше критерии безопасности являются основополагающими при определении допускаемой скорости движения локомотива в кривой. Решая уравнения равновесия экипажа в кривой, для которой необходимо установить допускаемую скорость, строят зависимость направляющих и боковых усилий от скорости. Эти зависимости обычно называют динамический паспортом локомотива для горизонтальной плоскости (рис 177). Исходя из критерия безопасности (У =0,8/7) по допускаемой величине бокового усилия на рельс определяют допускаемую скорость в кривой, и если величина упругого отжатия при найденном максимальном боковом усилии не превышает допускаемого, ю принятая скорость движения тепловоза в кривой считается установленной
Читайте также: