
Регулирование частоты вращения асинхронного двигателя кратко
Обновлено: 05.07.2024
Частоту вращения асинхронного двигателя можно регулировать:
1. Изменением активного сопротивления в цепи ротора двигателя с фазным ротором.
В роторной цепи проходят большие токи, для которых сложно создать резисторы с непрерывно меняющимся сопротивлением. Поэтому резисторы, обеспечивающие реостатное регулирование, делают ступенчатыми, а следовательно и частоту вращения регулируют ступенчато.
При некотором Мс=const, скольжение SºRполн также увеличивается, а угловая скорость уменьшается. Способ позволяет регулировать плавно регулировать угловую скорость в широких пределах (до s=1)
2. Изменением напряжения подводимое к обмотке статора.
При некотором Мс=const, при снижении напряжения скольжение будет увеличиваться, скорость при этом будет понижаться. Регулирование скольжения возможно в пределах (0
Первый способ. В пазы статора укладываются две обмотки с разным числом полюсов. В зависимости от требуемой частоты вращения к источнику питания подключается та, или иная обмотки.
Второй способ. Обмотку каждой фазы составляют из двух частей, которые в процессе регулирования соединяют последовательно или параллельно. При этом число пар полюсов изменяется в два раза.
1. Изменение значения активного сопротивления роторной цепи двигателя с фазным ротором ( реостатное регулирование ).
Регулирование угловой скорости осуществляется при включении в 3 фазы ротора внешнего сопротивления.

Рис.4. Схема включения регулировочных Рис.5. Механические
резисторов. реостатные характеристики
асинхронного двигателя в двигательном режиме.
Из рис.5 следует, что чем больше сопротивление R1’ Uф’’>Uф’’’>Uфз критическая частота вращения ( критическое скольжение ) остаётся постоянной, а максимальный момент снижается пропорционально квадрату напряжения.
Если Мст>Мкз , двигатель не тронется с места. Поэтому необходимо запускать двигатель при номинальном напряжении, или предварительно снять с его вала нагрузку. Диапазон регулирования небольшой ( до nк ).
Для увеличения диапазона регулирования в цепь ротора вводят нерегулируемый резистор, сопротивление которого достаточно, чтобы получить критическое скольжение ( Sк=3¸4 ) рис.8. Такое регулирование в отличие от реостатного позволяет обеспечить плавное изменение частоты вращения и исключить контактную аппаратуру в роторной цепи.

Рис.8. Механическая характеристика асинхронного двигателя
при изменении напряжения подводимого к статору и включении
активного сопротивления в цепь ротора.
Регулирование асинхронного двигателя совместным изменением частоты и напряжения

Наибольший практический интерес представляет частотный способ плавного регулирования частоты вращения. Это вытекает из формулы: .
Если при неизменном напряжении изменять частоту, то поток будет изменяться обратно пропорционально частоте, так как при уменьшении f1 поток возрастает, то это приведёт к резкому увеличению тока и повышению температуры. При увеличении частоты поток будет уменьшаться и, как следствие, уменьшится допустимый момент.
В номинальном режиме магнитная система двигателя насыщена. При Uном допустимо только увеличение частоты питающего напряжения. Тогда, при значении частоты f1>f1ном , соответственно увеличится w0 и индуктивное сопротивление и уменьшится магнитный поток. В соответствии с уравнением для увеличение w0 и xк = x1+x2’ вызывает уменьшение критического момента ( Мкр )

Критическое скольжение Sк с увеличением xк на основании уравнения для уменьшится. Иногда, механическая характеристика при f1>f1ном , будет иметь вид ( а )( рис.10 ).

Рис.10. Механические характеристики асинхронного двигателя
при изменении частоты питающего напряжения.
В соответствии с законом Костенко - характеристики асинхронного двигателя при частотах питающего напряжения, отличных от номинальной, зависят от соотношения между напряжением сети U1 и частотой сети f1. Основной закон частотного управления имеет вид:

где М1 и U1 - напряжение и момент при частоте f1 ; U2 и М2 - то же при частоте f2.

Для того, чтобы поток Ф при увеличении ил уменьшении частоты f1 оставался постоянным, необходимо при изменении частоты кратко менять напряжение , т.е.
При соблюдении этого условия критический момент изменится: увеличится с ростом частоты и уменьшится с её снижением ( кривые б, в рис.10 ).
При Мст=const ( т.е. М1=М2 ) из закона Костенко следует , т.е. условие целесообразно для приводов, у которых Мст - const.
Если требуется поддержать режим постоянной мощности электродвигателя P2=M2w2 - const, то, так как частота вращения пропорциональна f1, получим условие M1f1=M2f2=const.
С учётом ( б, рис 10 ) , т.е. регулируемый источник переменного тока должен обеспечивать изменение U и f в таких пределах, чтобы Если же двигатель работает на вентиляторную нагрузку, т.е. М~f2 , то и питающее напряжение определяется не только частотой f1 , но и характером изменения момента статической нагрузки на валу двигателя.
Механические характеристики для рассмотренных режимов представлены на рис. 11
Рис.11. Механические характеристики асинхронного двигателя
при регулировании изменения частоты питающего напряжения.
На рис ( а ) приведена регулировочная характеристика при Мст=const; на ( б ) - при Pст=Мстw=const; на ( в ) - при Мст=var ( вентиляторная нагрузка ).
Регулирование угловой скорости двигателей, выполненных на частоту f1=50Гц, выше номинальной ( повышением частоты ) допустимо в 1.5¸2.0 раза. Указанное ограничение обусловлено прежде всего прочностью крепления обмотки ротора, а так же повышенными потерями мощности в стали статора. Регулирование скорости ниже номинальной ( т.е. понижением частоты ) ограничивается нестабильностью работы двигателя, в связи с чем диапазон регулирования Д=1:10¸1:15.
Способ регулирования угловой скорости изменением f1 позволяет получить жёсткие характеристики ( см. рис ).
Потери мощности при работе на регулировочных характеристиках не велики, так как двигатель работает не линейных участках механических характеристик при небольших значениях скольжения ( Рпэ=Мw0S ).
При наличии соответствующего преобразователя частоты можно получить любую плавность регулирования.
Регулирование асинхронного двигателя переключением пар полюсов.
Из выражения или следует , что при изменении числа пар полюсов р получаются механические характеристики с различной частотой вращения идеального холостого хода.
Так как значение р определяется целыми числами, то переход от одной характеристики к другой в процессе регулирования носит ступенчатый характер. Существует два способа регулирования изменением числа пар полюсов.
Первый способ. В пазы статора укладываются две обмотки с разным числом полюсов. В зависимости от требуемой частоты вращения к источнику питания подключается та, или иная обмотки.
Второй способ. Обмотку каждой фазы составляют из двух частей, которые в процессе регулирования соединяют последовательно или параллельно. При этом число пар полюсов изменяется в два раза.
© 2014-2022 — Студопедия.Нет — Информационный студенческий ресурс. Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав (0.006)

Рис. 266. Схема переключения катушек обмотки статора (одной фазы) для изменения числа полюсов: а — при четырех полюсах; б — при двух полюсах
скольжение s. Последнее при заданных значениях момента на валу Мвн и частоты f1 можно изменять путем включения в цепь обмотки ротора реостата.
Регулирование путем изменения частоты питающего напряжения. Этот способ требует наличия преобразователя частоты, к которому должен быть подключен асинхронный двигатель. На основе управляемых полупроводниковых вентилей (тиристоров) созданы статические преобразователи частоты и построен ряд опытных электровозов и тепловозов с асинхронными двигателями, частота вращения которых регулируется путем изменения частоты питающего напряжения. Такой способ регулирования частоты вращения ротора асинхронного двигателя является весьма перспективным.
Регулирование путем изменения числа пар полюсов. Этот способ позволяет получить ступенчатое изменение частоты вращения. Для этой цели отдельные катушки 1, 2 и 3, 4, составляющие одну фазу (рис. 266), переключаются так, чтобы изменялось соответствующим образом направление тока в них (например, с последовательного согласного соединения на встречное). При согласном включении катушек (рис. 266, а) число полюсов равно четырем, при встречном включении (рис. 266, б) — двум. Катушки двух других фаз, сдвинутые в пространстве на 120°, соединяются таким же образом. Такое же уменьшение числа полюсов можно осуществить при переключении катушек с последовательного на параллельное соединение. При изменении числа полюсов изменяется частота вращения n1 магнитного поля двигателя, а следовательно, и частота вращения n его ротора. Если нужно иметь три или четыре частоты вращения n1, то на статоре располагают еще одну обмотку, при переключении которой можно получить еще две частоты. Существуют двигатели, которые обеспечивают изменение частоты вращения n1 при постоянном наибольшем моменте или при приблизительно постоянной мощности (рис. 267).
В асинхронном двигателе число полюсов ротора должно быть равно числу полюсов статора. В короткозамкнутом роторе это условие выполняется автоматически и при переключении обмотки статора никаких изменений в обмотке ротора выполнять не требуется.

Рис. 267. Механические характеристики двухскоростных асинхронных двигателей с постоянным наибольшим моментом (а) и постоянной мощностью (б)

Рис. 268. Механические характеристики асинхронного двигателя при регулировании частоты вращения путем включения реостата в цепь обмотки ротора

Рис. 269. Схемы подключения асинхронного двигателя к сети при изменении направления его вращения
В двигателе же с фазным ротором в этом случае надо было бы изменять число полюсов обмотки ротора, что сильно усложнило бы его конструкцию, поэтому такой способ регулирования частоты вращения используется только в двигателях с коротко-замкнутым ротором. Такие двигатели имеют большие габаритные размеры и массу по сравнению с двигателями общего применения, а следовательно, и большую стоимость. Кроме того, регулирование осуществляется большими ступенями; при частоте f1 = 50 Гц частота вращения поля n1 при переключениях изменяется в отношении 3000:1500:1000:750.
Регулирование путем включения в цепь ротора реостата. При включении в цепь обмотки ротора реостата с различным сопротивлением (Rп4, RпЗ, Rп2 и т. д.) получаем ряд реостатных механических характеристик 4, 3 и 2 двигателя. При этом некоторому нагрузочному моменту Мном (рис. 268) будут соответствовать меньшие частоты вращения n4, n3, n2 и т. д., чем частота nе при работе двигателя на естественной характеристике 1 (при Rп = 0). Это способ регулирования может быть использован только для двигателей с фазным ротором. Он позволяет плавно изменять частоту вращения в широких пределах. Недостатками его являются большие потери энергии в регулировочном реостате, поэтому его используют только при кратковременных режимах работы двигателя (при пуске и пр.).
Изменение направления вращения. Для изменения направления вращения двигателя нужно изменить направление вращения магнитного поля, создаваемого обмотками статора. Это достигается изменением порядка чередования тока в фазах обмотки статора. Например, если максимумы токов поступают в фазы обмотки статора 1 (рис. 269, а) в следующем порядке: фаза А — фаза В — фаза С, то ротор 2 двигателя будет вращаться по часовой стрелке. Если же подавать их в такой последовательности: фаза В — фаза А — фаза С, то ротор начнет вращаться против часовой стрелки. Для этой цели необходимо изменить схему соединения обмоток статора с сетью, переключив две любые фазы (провода). Например, зажим А обмотки статора, который ранее был соединен с линейным проводом Л1, нужно переключить на провод Л2, а зажим В этой обмотки, соединенный ранее с Л2, переключить на провод Л1 (рис. 269,б). Такое переключение можно осуществить обычным переключателем.

Рисунок 1. Асинхронный двигатель Асинхронный двигатель (рис. 1) имеет неподвижную часть, которая называется статор, и вращающуюся часть, именуемую ротором. Магнитное поле создается в обмотке, размещенной в статоре. Такая конструкция электродвигателя позволяет регулировать частоту его вращения различными способами.
Основные технические характеристики, учитываемые при изменении частоты вращения
При регулировании частоты вращения асинхронных электродвигателей следует учитывать несколько основных технических показателей, которые в значительной мере влияют на процесс работы двигателей.
- Диапазон регулирования Д, то есть предел, до которого возможно изменять частоту вращения. Эта характеристика вычисляется по соотношению минимальной и максимальной частоты вращения.
- Плавность регулирования — определяется по минимальному скачку частоты вращения электродвигателя, когда осуществляется переход одной механической характеристики на другую.
- Направление изменения частоты вращения двигателя (так называемая зона регулирования). Номинальные условия работы определяют естественную механическую характеристику двигателя. Когда осуществляется процесс регулирования частоты вращения, эти характеристики (напряжение и частота питающей сети) начнут изменяться. В результате получаются искусственные характеристики, которые обычно ниже естественных.
Есть несколько способов регулирования частоты вращения электродвигателя:
Регулирование частоты вращения изменением частоты питающей сети
Регулирование частоты вращения путем изменения частоты в питающей сети считается одним из самых экономичных способов регулирования, который позволяет добиться отличных механических характеристик электропривода. Когда происходит изменение частоты питающей сети, частота вращения магнитного поля также меняется.
Преобразование стандартной частоты сети, которая составляет 50 Гц, происходит за счет источника питания. Одновременно с изменением частоты происходит и изменение напряжения, которое необходимо для обеспечения высокой жесткости механических характеристик.
Регулирование частоты вращения позволяет добиться различных режимов работы электродвигателя:
- с постоянным вращающим моментом;
- с моментом, который пропорционален квадрату частоты;
- с постоянной мощностью на валу.
В качестве источника питания для регулирования могут использоваться электромашинные вращающиеся преобразователи, а также статические преобразователи частоты, которые работают на полупроводниковых приборах, серийно выпускающихся промышленностью.
Несомненным преимуществом частотного регулирования является наличие возможности плавно регулировать частоту вращения в обе стороны от естественной характеристики. При регулировании достигается высокая жесткость характеристик и отличная перегрузочная способность.
Регулирование частоты вращения изменением числа полюсов
Регулирование частоты вращения путем изменения числа полюсов происходит за счет изменения частоты вращения магнитного поля статора. Частота питающей сети остается неизменной, в то время как происходит изменение частоты вращения магнитного поля и частоты вращения ротора. Они меняются обратно пропорционально числу полюсов. Например, число полюсов равно 2, 4, 6, 8, тогда обороты двигателя при изменении их количества будут составлять 3000, 1500, 1000, 750 оборотов в минуту.
Двигатели, которые обеспечивают переключение числа пар полюсов, имеют обычно короткозамкнутый ротор с обмоткой. Благодаря этому ротору обеспечивается возможность работы двигателя без дополнительных пересоединений в цепи.
Изменение частоты вращения включением в цепь ротора с реостатом
Еще одним способом изменения частоты вращения двигателя является включение в цепь ротора с реостатом. Такой метод имеет существенное ограничение, так как может быть применен только для двигателей с фазным ротором. Он обеспечивает плавное изменение частоты вращения в очень широких пределах. Минусом же являются большие потери энергии в регулировочном реостате.
Изменение направления вращения
Изменение направления вращения двигателя может быть осуществлено за счет изменения направления вращения магнитного поля, которое создается обмотками статора. Изменение направления вращения можно достичь, изменив порядок чередования тока в фазах обмотки статора.
Регулирование частоты вращения. Электродвигатели переменного тока регулируют изменением: частоты тока питающей сети; числа пар полюсов обмотки статора; параметров цепи статора или ротора. Для асинхронных электродвигателей применяются все три способа регулирования, для синхронных — только первый.

У коллекторных электродвигателей переменного тока частоту вращения регулируют способом, указанным для электродвигателя постоянного тока с последовательным возбуждением.
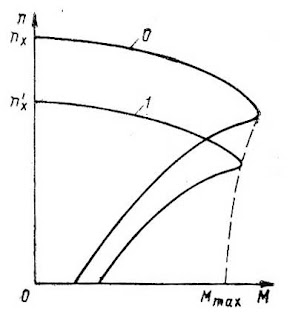
Регулирование частоты вращения изменением частоты тока является наиболее экономичным, но для питания электродвигателя требуется отдельный генератор или преобразователь с регулируемыми частотой и напряжением. При этом способе необходимо стремиться, чтобы характеристики асинхронного электродвигателя обладали достаточной жесткостью, которую обеспечивают совместным регулированием частоты тока и напряжения.
При пропорциональном понижении частоты тока и напряжения жесткость механической характеристики 1 (рис. 1) и максимальный момент Мmах уменьшаются незначительно по сравнению с естественной характеристикой 0. К преимуществам частотного регулирования следует отнести широкий диапазон (до 12:1) и плавность.
Регулирование частоты вращения изменением числа пар полюсов применяют только для асинхронных электродвигателей с короткозамкнутым ротором, так как у двигателей с фазным ротором потребовалось бы одновременное переключение обмотки ротора, усложняющее его схему и конструкцию.
Число пар полюсов можно изменить переключением числа секций одной обмотки или переключением двух независимых обмоток. В первом случае обмотка статора состоит из двух равных частей, включаемых последовательно или параллельно. Такое переключение позволяет изменить число пар полюсов в 2 раза и, следовательно, менять частоту вращения электродвигателя в отношении 2:1. Применение двух обмоток с различным числом пар полюсов позволяет менять частоту вращения в различных соотношениях, например, 1:3; 2:3 и т.д.
Двигатели, способные работать при двух различных числах пар полюсов, называют двухскоростными. Их конструируют для работы с постоянным моментом или постоянной мощностью.
Кроме двухскоростных двигателей, применяют трех- и четырехскоростные. Промышленность выпускает двухскоростные двигатели с одной обмоткой в статоре, трех- и четырехскоростные — с двумя обмотками, которые в свою очередь могут переключаться в отношении 2:1. Этот способ регулирования экономичен (двигатели имеют достаточно жесткие характеристики), но требует сложного переключающего устройства; кроме того, у двигателей с двумя обмотками резко снижается использование активной меди, так как при работе одной из обмоток вторая выключена. Однако благодаря своим преимуществам двигатели с переключением числа пар полюсов широко применяются в судовых электроприводах, не требующих плавного регулирования частоты вращения (шпилей, брашпилей и др.).
Регулирование изменением параметров цепей электродвигателя распространено у двигателей с фазным ротором. При введении в цепь ротора активного сопротивления частота вращения двигателя уменьшается при том же значении вращающего момента (см. рис. 2, характеристика 1). Этот способ неэкономичен, требует дорогого и громоздкого реостата, причем уменьшение частоты вращения составляет 10—20 %, поэтому в судовых условиях он применяется сравнительно редко и в основном на короткие промежутки времени.
Пуск синхронных двигателей. Различают прямой пуск и пуск с ограничением пускового тока.
Прямой пуск прост, но при включении возникают большие пусковые токи, достигающие значений Iп = (4-7) Iном.
При питании электродвигателя от электростанции ограниченной мощности пусковые токи могут вызвать недопустимые кратковременные снижения напряжения, нарушающие работу включенных приемников электрической энергии. Поэтому прямой пуск применяется в том случае, если мощность электродвигателя во много раз меньше мощности электростанции, от которой он питается.
Преимуществом пуска двигателя с помощью автотрансформатора по сравнению с предыдущим способом является возможность установить любое первоначальное напряжение (рис. 3, а) и затем плавно увеличивать его. Недостатком этого способа являются высокая стоимость, большие масса и габаритные размеры пускового автотрансформатора. Характеристики приведены на рис. 3, б.
Включение на время пуска в цепь статора резисторов (рис. 4,а) или реакторов приводит к большим активным потерям в случае резисторов и уменьшению коэффициента мощности в случае реакторов, однако вследствие простоты этих способов они находят достаточно широкое применение. Как видно из формул (2) и (3), включение элементов в цепь статора увеличивает критическую частоту вращения Мmах1 и уменьшает момент Mmах (характеристика 1, рис. 4, б).
Пуск двигателей с фазным ротором осуществляется с помощью пусковых реостатов, включенных в цепь ротора (рис. 5, а).
Пусковой реостат состоит из трех-четырех секций резисторов на каждую фазу. По мере разгона двигателя секции реостата поочередно закорачивают. Сопротивления пускового реостата рассчитывают графоаналитическим методом с использованием пусковой диаграммы. В начале пуска в цепь ротора включают реостат с полным сопротивлением, при котором пусковой момент должен быть Мп = (0,7 - 0,8)Мmах.
Механические характеристики асинхронного двигателя на рабочем участке от М = 0 до М = 0,8 Мmах можно приближенно считать прямолинейными, тогда на пусковой диаграмме (рис. 5, б) искусственная характеристика, соответствующая началу пуска, будет иметь вид прямой 4, проходящей через точки nх и г.
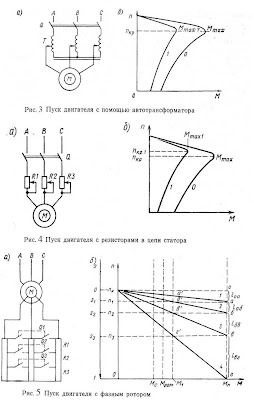
Рис. 3-5. Пуск двигателя с помощью автотрансформатора (3). Пуск двигателя с резисторами в цепи статора (4). Пуск двигателя с фазным ротором (5)
Под действием вращающего момента двигатель начнет вращаться с увеличивающейся частотой вращения, а вращающий момент, как видно из характеристики, будет уменьшаться. Этот процесс будет продолжаться до тех пор, пока вращающий момент не станет равным моменту сопротивления Мс, причем частота вращения будет меньше номинальной, соответствующей естественной характеристике.
Для увеличения частоты вращения необходимо выключить секцию пускового реостата R3 (см. рис. 5), замкнув выключатель Q3. Обычно это делают в точке г' (см. рис. 5, б) при вращающем моменте двигателя M1 = (1,1-1,2) Mном. Оставшееся сопротивление пускового реостата должно быть таким, чтобы момент двигателя на искусственной характеристике 3 не превышал значения пускового момента Mп, т.е. характеристика 3 должна пройти через точку "в" (считается, что за время замыкания выключателя Q3 частота вращения двигателя n3 не изменяется). Аналогично замыкают выключатели Q2 и Q1, двигатель переходит на работу в соответствии с характеристиками 2 и 1, пока не будет полностью шунтирован реостат.
Если для естественной характеристики 1

т. е. отношение критических скольжений для искусственной характеристики 2 и естественной характеристики 1 равно отношению приведенного активного сопротивления фазы ротора, включая сопротивление секции пускового реостата, к приведенному активному сопротивлению ротора.
Далее, из известной в электротехнике формулы:
видно, что при любых одинаковых моментах для естественной и искусственной характеристик имеет место условие s/sкp = const, следовательно, для характеристик 1 и 2 при моменте М = Мп справедливо равенство

На пусковой диаграмме (см. рис. 5) скольжению s1 соответствует отрезок "оа", а скольжению s2 — отрезок "об". Обозначим длину первого отрезка lоа, второго lоа + lоб, тогда:
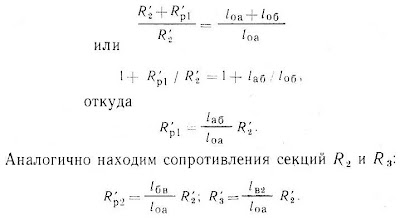
Активное сопротивление обмотки ротора двигателя определяется по каталогу. Если в каталоге данные о сопротивлении отсутствуют, его можно вычислить по формуле:
Электрическое торможение. Способы электрического торможения двигателей переменного тока аналогичны способам торможения двигателей постоянного тока.
Режим торможения с отдачей энергии в сеть наступает при частоте вращения ротора, превышающей частоту вращения магнитного поля. Такой режим возможен при разгоне двигателя под действием падающего груза или при переключении много-скоростного электродвигателя на меньшую скорость.
При разгоне двигателя под действием падающего груза по естественной характеристике 0 (рис. 6) частота вращения увеличивается и при М = 0 достигает частоты вращения магнитного поля nх. При дальнейшем разгоне двигателя частота вращения становится больше nх, э.д.с. больше напряжения сети и машина работает в режиме генератора, отдавая в сеть активную энергию. Этому режиму соответствует участок характеристики в квадранте II.
Динамическое торможение асинхронного двигателя производится отключением обмотки статора от трехфазной питающей сети и включением ее на питание от источника постоянного тока (рис. 7), при этом в двигателе вместо вращающегося магнитного поля возникает неподвижное (nх = 0). В результате взаимодействия вращающегося ротора с неподвижным магнитным полем возникает тормозной момент (см. рис. 6, характеристика 1). Тормозной момент можно регулировать изменением напряжения постоянного тока или изменением сопротивления резистора R (см. рис. 7).
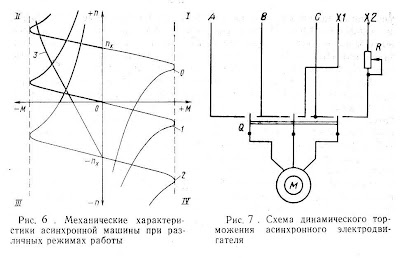
Рис. 6-7. Механические характеристики асинхронной машины при различных режимах работы (6). Схема динамического торможения асинхронного электродвигателя (7)
Для двигателей с фазным ротором, кроме того, регулирование тормозного момента возможно изменением сопротивления резисторов, включенных в цепь ротора.
Торможение противовключением может быть получено при реверсировании двигателя на ходу путем переключения двух фаз обмотки статора, при этом магнитное поле начинает вращаться в обратную сторону и тормозит двигатель. На рис. 6 этому режиму соответствует участок характеристики 2, находящийся в квадранте II. Когда частота вращения двигателя уменьшится до нуля, его необходимо отключить, в противном случае он начнет вращаться в обратную сторону (участок характеристики 2 в квадранте III).
Сравнение способов торможения
Сравнивая различные способы торможения двигателей переменного тока, можно сделать вывод, что наиболее экономичным является торможение с отдачей энергии в сеть, но при нем нельзя затормозить двигатель до частоты вращения меньшей, чем частота вращения магнитного поля.
Динамическое торможение позволяет тормозить электродвигатель до частоты вращения, близкой к нулю, но требует дополнительного источника постоянного тока.
Торможение противовключением наименее эффективно, так как при больших тормозных токах тормозной момент на валу двигателя с короткозамкнутым ротором незначителен.
Поэтому данный способ торможения применяется только для двигателей с фазным ротором, у которых за счет введения в цепь ротора резисторов с большим сопротивлением можно увеличить тормозной момент при одновременном уменьшении тока (см. рис. 6, характеристика 3).
Читайте также: