
Положение тела в пространстве кратко
Обновлено: 05.07.2024
Как определить положение тела? В одном древнем документе, относящемся к началу нашей эры, приведено такое описание местонахождения клада, содержащего слитки золота и серебра: «Стань у восточного угла крайнего дома села лицом на север и, пройдя
Тело отсчета можно выбрать совершенно произвольно. Им может служить, например, дом, в котором мы живем, вагон поезда, в котором мы едем, и вообще любое другое тело. Телами отсчета могут служить Земля, Солнце, звезды. Нам, живущим на Земле, удобно указывать положение тела относительно Земли. Впрочем, астрономы предпочитают вести отсчет относительно звезд.
Если тело отсчета выбрано, то положение тела задается расстоянием или расстояниями, отсчитываемыми от этого тела до тела отсчета.
Допустим, что тело может двигаться только вдоль некоторой линии. Так движется поезд по железной дороге, автомобиль по шоссе и т. д. Так как тело может находиться либо с одной, либо с другой стороны от тела отсчета, то расстояния, отсчитываемые в одну сторону от него, например вправо, считают положительными, в другую (Влево) — отрицательными.
Как определить, например, положение автомобилей на дороге (рис. 3)?
В качестве тела отсчета выберем придорожное селение А. Мысленно проведем вдоль дороги прямую со стрелкой, указывающей направление отсчета, которое мы примем за положительное.
Ее называют координатной осью. Отметим на координатной оси точку О, соответствующую селению А (начало отсчета). Тогда положение автомобиля определится длиной отрезка Число, выражающее эту длину в определенном масштабе, называют координатой автомобиля. На рисунке 3 масштаб выбран так, что координата получилась равной 1200 м.
Для автомобиля II координата выражается числом 400 м, но так как ее приходится отсчитывать влево от начала отсчета, то ей нужно приписать знак
Таким образом, положение тела на линии определяется одной координатой — расстоянием вдоль линии от этого тела до тела отсчета.
Если тело может двигаться в пределах некоторой плоскости (например, лодка на озере), то через выбранную на теле отсчета точку проводят две взаимно перпендикулярные прямые — оси координат.
Их принято обозначать, как это сделано на рисунке и а называют просто осями X и Они образуют так называемую прямоугольную систему координат
Из курса алгебры VII класса известно, что положение точки на плоскости определяют двумя координатами, отсчитываемыми от начала координат О вдоль осей X и Эти два числа, выражающие расстояния от начала координат, обозначают малыми буквами х и у. Например, у точки А (см. рис. 4): точки В:
Наконец, чтобы задать положение тела в пространстве (например, положение самолета в воздухе), нужно мысленно провести через тело отсчета три взаимно перпендикулярные прямые (три оси координат). Их принято обозначать (рис. 5). Соответственно этому положение тела (точки) в пространстве определяется тремя координатами:
Именно такая система координат использована в документе о кладе, о котором рассказано в начале параграфа. Чтобы найти клад, нужно только знать, где находится начало координат, от которого следует отсчитывать расстояние по осям X, Y и Z.
Итак, полооюение точки на линии, плоскости и в пространстве определяют соответственно одним, двумя и тремя числами — координатами. Пространство, в котором мы живем, является, как
говорят, пространством трех измерений, или трехмерным пространством.
В дальнейшем мы будем иметь дело главным образом с движениями вдоль линий или на плоскостях. Поэтому нам придется пользоваться либо одной, либо двумя координатами.
Мы уже говорили, что механика — это наука о том, как определять положение тела в любой момент времени. Поскольку положение тела определяется его координатами, то задача механики сводится к тому, чтобы уметь вычислять координаты тела в любой момент времени.
При движении тела его координаты изменяются. Если, например, координата, отсчитанная по оси X, в какой-то начальный момент времени была а спустя промежуток времени она стала равной то это значит, что координата изменилась на величину
Чтобы решить задачу механики, надо знать, как изменяются координаты тела со временем. Но как это узнать? Какими данными нужно для этого располагать? Чтодолжно быть известно заранее?
Ответы на эти вопросы дает раздел механики, который называют кинематикой. В нем мы ознакомимся с различными видами движения и с тем, как в разных случаях можно определять положение тела в любой момент времени.
Движение. Виды движений. Описание движения. Система отсчета.
Механическим движением тела (точки) называется изменение его положения в пространстве относительно других тел с течением времени.
Виды движений:
А) Равномерное прямолинейное движение материальной точки.
Б) Равноускоренное прямолинейное движение материальной точки.
В) Движение тела по дуге окружности с постоянной по модулю скоростью.
Г) Гармоническое колебательное движение. Важным случаем механического движения являются колебания, при которых параметры движения точки (координаты, скорость, ускорение) повторяются через определенные промежутки времени.
Описания движения .
1. Векторный способ описания движения
ОПРЕДЕЛЕНИЕ: Векторный способ описания движения – это описание изменения радиус-вектора материальной точки в пространстве с течением времени.
Рассмотрим движение точки М в некоторой системе отсчета Oxyz (рис.1). Зададим радиус-вектор точки r — вектор, соединяющий начало координат с этой точкой.
При движении точки M вектор r будет с течением времени изменяться, т.е. будет каким-то образом зависеть от времени. Эта зависимость r = r ( t ) представляет собой закон движения в векторном виде.
В процессе движения конец радиус-вектора будет описывать траекторию, а его изменение – перемещение s точки.

2. Координатный способ описания движения
ОПРЕДЕЛЕНИЕ: Координатный способ описания движения – описание изменения во времени координат точки в выбранной системе отсчета.

При координатном способе положение точки в пространстве задается тремя координатами (рис.2). Выбор системы координат зависит от конкретной задачи. Можно работать в декартовой (прямоугольной) системе, иногда удобнее бывает сферическая или цилиндрическая системы координат.
В декартовой системе координат положение точки определяется тройкой чисел ( x , y , z ) — ее декартовыми координатами.
Чтобы задать закон движения точки, необходимо знать значения ее координат в каждый момент времени. Закон движения в координатном виде в общем случае представляет собой систему трех уравнений: x = x ( t ), y = y ( t ), z = z ( t )
Между векторным и координатным способом описания движения существует непосредственная связь, а именно: числовые значения проекций радиус-вектора движущейся точки на координатные оси системы с тем же началом отсчета равны координатам точки: rx = x , ry = y , rz = z .
3. Естественный способ описания движения
ОПРЕДЕЛЕНИЕ: Естественный способ описания движения – описание движения вдоль траектории. Этим способом пользуются, когда траектория точки заранее известна.
Пусть точка М движется вдоль траектории АВ в системе отсчета Oxyz (рис.3). Выберем на траектории какую-нибудь неподвижную точку О 1 , которую будем считать началом отсчета, и определим положительное и отрицательное направления. Тогда положение точки M будет определяться расстоянием S от точки О 1 . При движении точка М переместится в точку М 1 , соответственно изменится ее расстояние от точки О 1 . Таким образом, расстояние S зависит от времени, а характер этой зависимости позволит определить положение точки М на траектории в любой момент времени. Закон движения в этом случае имеет вид: s = s ( t ) .

Пример 1

Пример 2

Под системой отсчета понимают тело отсчета, которое условно считается неподвижным, систему координат, связанную с телом отсчета, и часы, также связанные с телом отсчета. В кинематике система отсчета выбирается в соответствии с конкретными условиями задачи описания движения тела.
В кинематике движение тел изучается без выяснения причин, его вызывающих.
Кинематика – это раздел механики, в котором изучаются способы описания движений и связь между величинами, характеризующими это движение.
Долгое время понятия о кинематике были основаны на работах Аристотеля, который считал, что скорость падения зависит от веса тела, а тело может двигаться только при действии на него некоторых сил. Только в конце XVI века этим вопросом подробно занялся Галилео Галилей, который проводил знаменитые опыты на Пизанской башне, изучая свободное падение и инерцию тел. Галилей доказал неправильность идей Аристотеля.
Чтобы описать движение тела, нужно указать способ определения его положения в любой момент времени. Это непростая задача. Ведь зачастую разные части тела движутся с разной скоростью и по разной траектории. Проще описать движение какой-либо точки тела. Зная, как движется каждая точка тела, мы узнаем, как движется все тело.
Не всегда нужно очень точно описывать движение тела. Если расстояние, которое проходит предмет, намного превышает его размеры, то мы можем принять его за точку. Например, если велосипедист проедет 10 км, то не важно, как двигалась каждая часть его тела. В этом случае мы упрощаем действительность. В этой ситуации большая точность не нужна, ведь длина пройденного велосипедистом пути во много раз превышает размеры самого велосипедиста.
Для того чтобы определить положение точки в пространстве, нужно сравнить положение ее с каким-либо телом. Положение велосипедиста, движущегося по дороге различно относительно разных километровых столбов. Поэтому, чтобы задать положение в пространстве, необходимо указать тело отсчета – тело, относительно которого задаётся положение данного тела или данной точки.
Для описания движения тела, то есть определения его положения в пространстве, необходимо с телом отсчета связать систему координат, в которой положение задается с помощью трех координат.
При движении на плоскости с телом отсчета связывают систему координат, состоящую из двух координатных осей.
Чтобы описать движение точки, нужно научиться определять её положение в любой момент времени относительно выбранного тела отсчета.
Движение точки можно задать несколькими различными способами. Координатный способ. Его суть заключается в том, что мы задаем текущее положение точки с помощью координат. Если точка изменяет свое положение, то ее координаты также будут меняться с течением времени. Или, если сказать иначе, координаты исследуемой точки зависят от времени, поэтому они являются функциями времени.
Уравнения, которые вы видите, принято называть кинематическими уравнениями движения точки, записанными в координатной форме. Если они известны, то мы можем рассчитать координаты точки в любой момент времени, а, следовательно, и ее текущее положение относительно выбранного тела отсчета. Вид уравнений для любого конкретного движения будет вполне определенным.
Векторный способ. Положение точки определяется с помощью радиус-вектора. Радиус-вектором называется вектор, который выходит из начала координат и доходит до точки, положение которой нужно определить. Если мы рассматриваем движение материальной точки, радиус-вектор, который задает ее положение, с течением времени изменяется: поворачивается и меняет свою длину, другими словами является функцией времени.
Уравнение, которое вы видите на экране, это закон движения точки, записанный в векторной форме. Если он известен, то мы можем вычислить радиус-вектор точки для любого момента времени и, следовательно, можем определить текущее положение точки. Вместо того, чтобы задавать сразу три скалярных уравнения, можно задать всего одно векторное уравнение, соответствующее скалярным.
Линия, по которой движется точка в пространстве, называется траекторией.
Движения точки подразделяют на два вида: прямолинейное и криволинейное в зависимости от формы траектории. Если траектория движения прямая линия, то движение точки будет называться прямолинейным, а если кривая - криволинейным. Например, лифт, поднимаясь и опускаясь в шахте, движется прямолинейно. Самолет, совершающий вираж движется криволинейно. Движение по окружности – это частный случай криволинейного движения.
Относительность механического движения проявляется в том, что траектории движения одного и того же тела в разных системах отсчета могут отличаться. Например, человек, идущий прямолинейно по вращающейся карусели, движется по спирали относительно земли.
Поскольку движение происходит во времени, то при описании движения необходимо использовать прибор для измерения времени – часы.
Современные часы - это достаточно сложный механизм. Они позволяют отсчитывать время в секундах с высочайшей точностью (до тринадцатого знака после запятой). Конечно, ни одни механические часы не могут похвастаться такой точностью. Самые точные в мире механические часы, циферблат которых мы каждый день наблюдаем на телеэкране, в десять тысяч раз менее точны, чем государственный эталон времени. В России главный эталон времени находится во Всероссийском научно-исследовательском институте физико-технических и радиотехнических измерений под Москвой, это сложный комплекс, в который входят дающие строго определенную частоту генераторы, водородные хранители частоты, хранители шкал времени, приборы для измерения временных интервалов и другая аппаратура. Некоторые составляющие эталона уникальны: радиооптический частотный мост, служащий для измерения частот излучения лазера. Кроме России, такие мосты есть только в США, Канаде, Франции и Великобритании. Российский государственный эталон времени входит в группу лучших мировых эталонов, его относительная погрешность не превышает пять на десять в минус четырнадцатой степени секунды, что позволяет накопить погрешность не более 1 секунды за полмиллиона лет. Очевидно, что в быту нет никакой необходимости измерять время настолько точно. Однако для физических исследований, космонавтики, геодезии, радиоастрономии, управления воздушным транспортом настолько высокая точность в измерении времени просто необходима. От точности этих измерений зависит точность, с которой мы сможем рассчитать положение тела в какой-либо момент времени.
Поэтому, чтобы рассчитать положение тела или точки относительно выбранного тела отсчета в зависимости от времени, надо связать с ним систему координат и измерить время. Система координат, связанная с телом отсчета, и часы составляют систему отсчета.
Часто при решении практических задач бывает важно знать начальную точку движения и конечную. При этом не имеет значения, по какой траектории движется тело. Например, пассажир должен иметь информацию о пункте отправления его автобуса и пункте назначения. При этом для него не важно, по какому маршруту движется автобус. Маршруты автобусов могут быть самые разнообразные, но пункт отправления и пункт назначения будут одни и те же. Поэтому движение характеризуют с помощью физической величины, называемой перемещением. Направленный отрезок, соединяющий начальное положение точки и ее конечное положение, называют вектором перемещения или просто перемещением точки.
Единицей перемещения в международной системе единиц является 1 метр. Перемещение – это векторная величина, она характеризуется модулем и направлением. Модуль вектора перемещения равен длине направленного отрезка.
С другой стороны, длина пути автобуса при движении по различным маршрутам может оказаться разной.
Длина пути или просто путь – это скаляр. Путь – это расстояние, пройденное телом вдоль траектории.
Путь и перемещению совпадают, только если тело движется прямолинейно в одну сторону. Во всех остальных случаях путь больше, чем модуль перемещения. В случае, если движение начинается и заканчивается в одной точке, перемещение равно нулю.
При векторном способе задания движения перемещение можно рассматривать как изменение радиус-вектора движущегося тела.
На рисунке мы видим траекторию движения тела из точки М1 в точку М2. Тогда радиус-вектор r1 задает положение тела в начальный момент времени, а радиус-вектор r2 – в конечный момент времени. Вектор, соединяющий точки М1 и М2, – это вектор перемещения. Этот вектор равен разности векторов r1 и r2, то есть изменению радиус-вектора.

Чтобы говорить о положении каких-либо тел, необходимо определиться с тем, как обозначать это положение. Какими величинами мы можем характеризовать положение того или иного тела, сколько параметров для этого нужно? На этом уроке мы и рассмотрим данные вопросы.
В данный момент вы не можете посмотреть или раздать видеоурок ученикам
Чтобы получить доступ к этому и другим видеоурокам комплекта, вам нужно добавить его в личный кабинет, приобретя в каталоге.
Получите невероятные возможности



Конспект урока "Положение и движение точки в пространстве"
Мы продолжаем тему классической механики Ньютона. Механика делится на два основных раздела: кинематика и динамика. Мы начнём с изучения кинематики.

Кинематика изучает движение тел, способы описания этого движения, а также, его характеристики.
Описать движение человека или полет бабочки математически — это крайне сложная задача. Но есть задачи и проще: например, описать движение материальной точки. Добавим теперь, что эта точка двигается равномерно и прямолинейно. Тогда, описать её движение не так уж сложно. Именно с таких идеализированных моделей и следует начать изучение кинематики. Ведь если мы сможем описать движение каждой точки тела, то мы также сможем описать движение самого тела.
В первую очередь, нужно создать систему отсчёта. Система отсчёта состоит из тела отсчёта, системы координат и счётчика времени.
Тело отсчёта — это физическое тело, относительно которого задаётся положение данного тела или точки.
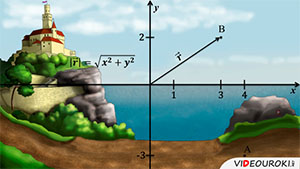
Понять это довольно просто. На рисунке изображено дерево.

На каком расстоянии находится это дерево? На каком расстоянии от чего? — спросите вы. Конечно, нам нужно выбрать точку отсчета. Это может быть белый треугольник на камне, а может быть флажок на за́мке. В зависимости от этого выбора, ответ на вопрос будет различным. Необходимо выбрать какую-то точку за точку отсчёта, то есть за ноль. Скажем, мы можем обозначить за ноль центр картинки.

Далее, мы используем декартовы координаты, чтобы описать положения тел. Выбираем единичный отрезок и, исходя из этого определяем положения тел. Это положение задаётся с помощью координат. Например, точка А имеет координаты четыре и минус три, а точка Б — три и два. Также, можно задать положение тела с помощью радиус-вектора — это вектор, который соединяет точку и начало координат.

Радиус-вектор обозначается латинской буквой r и, как и любой другой вектор, имеет длину и направление. Длиной радиус-вектора будет является геометрическая сумма координат точки. Иными словами, мы вычисляем длину радиус-вектора, используя теорему Пифагора. То есть, длина радиус-вектора, описывающего положение точки B будет равна .
Модуль и направление любого вектора находят с помощью проекций этого вектора на оси координат.

Что же такое проекция? Давайте рассмотрим вектор с начальной точкой А и конечной точкой B, находящийся в системе координат на плоскости.

Из точек А и B опустим перпендикуляры на ось икс. Длина отрезка А1 B1 — это и есть проекция вектора цэ на ось x. Точно таким же способом находится проекция вектора на ось y. Как видно из построения: . Аналогично можно найти проекцию на ось y: ..
Проекция вектора на ось — это алгебраическая величина. Её знак можно определить так: если, двигаясь от начальной точки проекции до конечной точки проекции, надо идти в положительном направлении, то проекция положительная, а в противном случае — она отрицательная.
Иначе это можно объяснить так: если вектор составляет острый угол с направлением оси, на которую мы собираемся сделать проекцию, то проекция будет положительной, а если угол между вектором и направлением оси — тупой, то проекция будет отрицательной.
Нетрудно догадаться, что если вектор перпендикулярен оси, то его проекция на эту ось будет равна нулю.
Аналогично, если вектор параллелен оси, то его проекция на эту ось будет равна модулю вектора.

Рассмотрим теперь, как задать положение точки в пространстве, а не на плоскости. Как вы знаете, у есть три пространственных измерения, поэтому, чтобы задать положение точки в пространстве нам нужно три координаты. Сначала мы точно также, как и ранее, находим точку на плоскости, а потом от этой точки откладываем числовое значение координаты z параллельно оси Z.

Положение такой точки точно также можно задать с помощью радиус-вектора. Его модуль также будет находиться с помощью геометрической суммы координат точки.
Примеры решения задач.
Задача 1. В системе координат отметьте точку N (1;3;7), постройте соответствующий радиус-вектор и найдите его длину.

Задача 2. В системе координат отметьте точку N (1;3;7), постройте соответствующий радиус-вектор и найдите его длину.

Задача 3. Постройте проекции вектора на оси x и y и найдите их числовые значения, если , а угол между и осью x составляет 30.
Читайте также: