
Кинематика и динамика вращательного движения кратко
Обновлено: 02.07.2024
Если все точки тела совершают движения по окружностям, при этом все центры данных окружностей находятся на одной прямой, тогда такое движение тела (системы) называют вращением. При этом ось, на которой находятся центры окружностей, получила название оси вращения:
- ее положение может быть внутри тела (системы) или вне его;
- она может двигаться или быть неподвижной;
- плоскости траекторий движения точек тела перпендикулярны оси вращения;
- в трехмерном пространстве каждое вращение обладает осью вращения (теорема Эйлера).
Угловая скорость
Допустим, что некоторое твердое тело совершает вращения вокруг неподвижной оси. В таком движении точки данного тела описывают окружности. Центы этих окружностей принадлежат оси вращения, радиусы их различны.
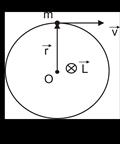
Рассмотрим одну точку нашего тела. Пусть она перемещается по окружности, радиус которой равен $R$ (рис.1).
Рисунок 1. Угловая скорость. Автор24 — интернет-биржа студенческих работ
Положение, рассматриваемой точки будем задавать при помощи угла поворота $\Delta \varphi$.
Элементарно малые углы поворота можно рассматривать как векторы. При этом величина вектора $d\vec \varphi$ равна величине угла поворота $\Delta \varphi$ (рис.1).
Направление $d\vec \varphi$ подчинено правилу правого буравчика, то есть направлено вдоль направления поступательного перемещения острия винта, при вращении его головки, совпадающем с направлением вращения точки по ее окружности.
$d\vec \varphi$ называют аксиальным вектором (псевдовектором). Псевдо векторы не имеют точки приложения, их изображают в любой точке на оси вращения.
Готовые работы на аналогичную тему
$\vec \omega$ - угловая скорость.
Вектор $\omega$ направлен по оси вращения (правило правого винта), и совпадает по направлению с элементарным углом поворота $d\vec \varphi$ (рис.1).
Единица $\omega$ - это радиан, деленный на секунду (рад/с).
Линейную скорость нашей материальной точки можно связать с угловой скоростью, эту связь легко установить, рассматривая рис.1.
Мы получили, линейная скорость по величине равна:
В виде вектора линейная скорость материальной точки, определяется так:
$\vec v = \vec \omega \times \vec R (3),$
где $R$ - радиус окружности.
Из формулы (3) следует, что величина линейной скорости равна:
$v=\omega \times R sin (\alpha )(4),$
где $\alpha$ - угол между векторами $\vec \omega$ и $\vec R$.
Направление результата векторного произведения в (4) определяет правило правого винта. Головку винта вращают от $\vec \omega$ к $\vec R$, поступательное перемещение острия указывает направление $\vec v$.
При постоянной угловой скорости вращение называют равномерным.
Период вращения
Для характеристики равномерного вращения вводят такую физическую величину, как период вращения $T$.
Периодом вращения называют время, равное времени полного оборота точки на угол в $360^0 C$:
Величину, обратную периоду вращения называют частотой ($\nu$):
$\omega = 2\pi \nu (7).$
Угловое ускорение
Угловым ускорением называют вектор, равный:
или второй производной от угла поворота:
При движении по окружности вектор $\omega$ изменяется только по величине, не изменяя своего направления. В этом случае полное ускорение материальной точки можно найти, применяя выражение (3) и (8) как:
$\vec \varepsilon= \frac =\frac \times \vec R+\vec \omega \times \frac=\frac \times \vec R+ \vec \omega \times \vec v $.
Если тело совершает вращения около неподвижной оси, то $\vec \varepsilon$ имеет направление вдоль оси вращения тела.
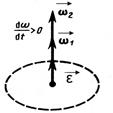
Если угловая скорость вращения тела увеличивается (вращение ускоренное), то вектор углового ускорения и вектор угловой скорости сонаправлены.
При замедленном вращении векторы углового ускорения и угловой скорости имеют противоположные направления.
Тангенциальная и нормальная компоненты линейного ускорения
По определению, составляющая линейного ускорения ($a_$), которая отвечает за изменение величины скорости движения тела (тангенциальное ускорение) равна:
Принимая во внимание выражение (2), мы получим:
Ускорение, отвечающее за изменение направления скорости движения при криволинейном перемещении – это нормальное (или центростремительное ускорение) ($a_n$) равно:
Использовав формулу (2), имеем:
Мы получили связи между линейными параметрами движения:
- длиной пути ($s$) пройденным, материальной точкой по дуге окружности радиуса $R$;
- линейной скоростью перемещения точки $v$;
- тангенциальным ускорением $a_$;
- нормальным ускорением $a_n$
и угловыми величинами:
- углом поворота $\varphi$;
- угловой скоростью $\omega$;
- угловым ускорением $varepsilon$.
$s=R\Delta \varphi$, $v=R\omega$, $a_=R\varepsilon$, $a_n=\omega^2R.$
Вращение с постоянным угловым ускорением
Если вращение материальной точки происходит с постоянным угловым ускорением ($\varepsilon = const$,), то его называют равнопеременным.
В таком случае это движение можно описывать при помощи следующих уравнений. Для угловой скорости имеют место равенства:
$\omega = \omega _0+\varepsilon t (13) $
при вращении с положительным ускорением (равноускоренное движение) и
$\omega = \omega _0-\varepsilon t (14) $
при равнозамедленном вращении. В формулах (13) и (14) $\omega_0$ - начальная скорость вращения.
Угол поворота материальной точки при равноускоренном движении задает формула:
$\varphi= \varphi_0 + \omega _0 t +\frac (15)$
при равноускоренном движении
$\varphi= \varphi_0 + \omega _0 t - \frac (16)$
при равнозамедленном движении. В уравнениях (15) и (16) $\varphi_0 $ - начальный угол поворота.
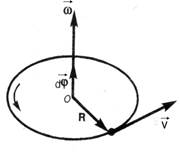
При вращении твердого тела вокруг неподвижной оси отдельные точки тела описывают окружности, центры которых лежат на оси вращения. Пусть некоторая точка движется по окружности радиуса R и за бесконечно малый промежуток времени dt совершает поворот на угол (малый поворот рассматривается как вектор, модуль которого равен углу поворота dφ, а направление подчиняется правилу правого винта (рис. 1)).
Угловой скоростью называется векторная физическая величина, определяемая первой производной угла поворота по времени:
Вектор , как и вектор , направлен вдоль оси вращения по правилу правого винта (рис. 1).
Угловым ускорением называется векторная физическая величина, определяемая первой производной угловой скорости по времени:
При ускоренном движении вектор по направлению совпадает с (рис.2, а), а при замедленном - и направлены противоположно друг другу (рис. 2,б).
 а |  б |
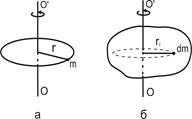
Моментом инерции I материальной точки называется скалярная физическая величина, определяемая произведением ее массы m на квадрат радиуса окружности r, по которой она может двигаться относительно некоторой произвольно выбранной оси ОО ' (рис. 3,а).
момент инерции всего тела
где ri – радиус вращения i – той элементарной массы, а интеграл берется по всему объему тела (рис. 3,б). Для однородных тел, для которых плотность (где m – масса тела, а V – его объем, т.е. плотность определяется массой, заключенной в единице объема), момент инерции будет вычисляться по формуле
Если известен момент инерции тела относительно оси ОО', проходящей через центр масс тела (обозначим его Io), то момент инерции тела относительно любой параллельной ей оси ZZ'
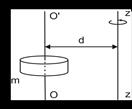
(обозначим его I ) равен
где m – масса тела, d – расстояние между осями (рис. 4).
Модуль момента силы равен , где α – угол между и , - плечо силы (l - длина перпендикуляра, опущенного из точки О на направление действия силы (рис. 5)).
Основное уравнение динамики вращательного движения твердого тела относительно неподвижной оси: , то есть направление совпадает с направлением (рис. 4). Моментом силы Mz относительно неподвижной оси ZZ' называется проекция этого момента на данную ось.
Если твердое тело, вращающееся вокруг некоторой неподвижной оси ZZ', представить в виде совокупности элементарных масс, и спроектировать моменты импульсов всех этих элементарных масс на это направление, получим момент импульса тела Lz относительно этой оси. Суммирование производим по всем элементарным массам mi, на которые разбивается тело.
так как , где ω - угловая скорость вращения тела, I – момент инерции твердого тела. В общем случае .
Закон сохранения момента импульса: момент импульса замкнутой системы тел не меняется со временем, причем это утверждение справедливо для момента импульса, взятого относительно любой точки инерциальной системы отсчета. Этот закон выполняется только в инерциальных системах отсчета.
Кинетическая энергия измеряется работой, которую тело может произвести благодаря инерции при затормаживании тела до полной остановки. Кинетическая энергия материальной точки массы m при поступательном движении со скоростью V определяется фор-мулой Ек = . При вращательном движении роль массы m выпол-няет момент инерции I, а вместо скорости V выступает угловая скорость ω, и формула кинетической энергии при вращательном движении материальной точки приобретает вид: Eк вращ .

Потенциальная энергия измеряется работой, которую тело может совершить при перемещении его из одного простран-ственного положения в другое. Так, потенциальная энергия тела массы m, поднятого на высоту h над поверхностью Земли Eпот = mgh. Потенциальная энергия упруго деформированной пружины Епот = , где k – коэффициент упругости, х – деформация пружины. Потенциаль-ная энергия при закручивании стержня Епот = , где D – константа, зависящая от упругих свойств стержня при его кручении (так называ-мый модуль кручения), αо – угол деформации при закручивании.
Закон сохранения механической энергии гласит: полная механическая энергия замкнутой системы тел, между которыми действуют только консервативные силы, остается постоянной, возможны лишь превращения кинетической энергии в потенциальную и наоборот. Напомним, что консервативными называют силы, работа которых по замкнутой траектории равна нулю. Так, при закручивании упругого стержня (нити) закон сохранения энергии может быть записан как .
При вращении твердого тела вокруг неподвижной оси отдельные точки тела описывают окружности, центры которых лежат на оси вращения. Пусть некоторая точка движется по окружности радиуса R и за бесконечно малый промежуток времени dt совершает поворот на угол (малый поворот рассматривается как вектор, модуль которого равен углу поворота dφ, а направление подчиняется правилу правого винта (рис. 1)).
Угловой скоростью называется векторная физическая величина, определяемая первой производной угла поворота по времени:
Вектор , как и вектор , направлен вдоль оси вращения по правилу правого винта (рис. 1).
Угловым ускорением называется векторная физическая величина, определяемая первой производной угловой скорости по времени:
При ускоренном движении вектор по направлению совпадает с (рис.2, а), а при замедленном - и направлены противоположно друг другу (рис. 2,б).
| а | б |
Моментом инерции I материальной точки называется скалярная физическая величина, определяемая произведением ее массы m на квадрат радиуса окружности r, по которой она может двигаться относительно некоторой произвольно выбранной оси ОО ' (рис. 3,а).
момент инерции всего тела
где ri – радиус вращения i – той элементарной массы, а интеграл берется по всему объему тела (рис. 3,б). Для однородных тел, для которых плотность (где m – масса тела, а V – его объем, т.е. плотность определяется массой, заключенной в единице объема), момент инерции будет вычисляться по формуле
Если известен момент инерции тела относительно оси ОО', проходящей через центр масс тела (обозначим его Io), то момент инерции тела относительно любой параллельной ей оси ZZ'
(обозначим его I ) равен
где m – масса тела, d – расстояние между осями (рис. 4).
Модуль момента силы равен , где α – угол между и , - плечо силы (l - длина перпендикуляра, опущенного из точки О на направление действия силы (рис. 5)).
Основное уравнение динамики вращательного движения твердого тела относительно неподвижной оси: , то есть направление совпадает с направлением (рис. 4). Моментом силы Mz относительно неподвижной оси ZZ' называется проекция этого момента на данную ось.
Если твердое тело, вращающееся вокруг некоторой неподвижной оси ZZ', представить в виде совокупности элементарных масс, и спроектировать моменты импульсов всех этих элементарных масс на это направление, получим момент импульса тела Lz относительно этой оси. Суммирование производим по всем элементарным массам mi, на которые разбивается тело.
так как , где ω - угловая скорость вращения тела, I – момент инерции твердого тела. В общем случае .
Закон сохранения момента импульса: момент импульса замкнутой системы тел не меняется со временем, причем это утверждение справедливо для момента импульса, взятого относительно любой точки инерциальной системы отсчета. Этот закон выполняется только в инерциальных системах отсчета.
Кинетическая энергия измеряется работой, которую тело может произвести благодаря инерции при затормаживании тела до полной остановки. Кинетическая энергия материальной точки массы m при поступательном движении со скоростью V определяется фор-мулой Ек = . При вращательном движении роль массы m выпол-няет момент инерции I, а вместо скорости V выступает угловая скорость ω, и формула кинетической энергии при вращательном движении материальной точки приобретает вид: Eк вращ .
Потенциальная энергия измеряется работой, которую тело может совершить при перемещении его из одного простран-ственного положения в другое. Так, потенциальная энергия тела массы m, поднятого на высоту h над поверхностью Земли Eпот = mgh. Потенциальная энергия упруго деформированной пружины Епот = , где k – коэффициент упругости, х – деформация пружины. Потенциаль-ная энергия при закручивании стержня Епот = , где D – константа, зависящая от упругих свойств стержня при его кручении (так называ-мый модуль кручения), αо – угол деформации при закручивании.
Закон сохранения механической энергии гласит: полная механическая энергия замкнутой системы тел, между которыми действуют только консервативные силы, остается постоянной, возможны лишь превращения кинетической энергии в потенциальную и наоборот. Напомним, что консервативными называют силы, работа которых по замкнутой траектории равна нулю. Так, при закручивании упругого стержня (нити) закон сохранения энергии может быть записан как .
В этой статье описывается важный раздел физики - "Кинематика и динамика вращательного движения".
Основные понятия кинематики вращательного движения
Вращательным движением материальной точки вокруг неподвижной оси называют такое движение, траекторией которого является окружность, находящаяся в плоскости перпендикулярной к оси, а центр ее лежит на оси вращения.
Вращательное движение твердого тела - это движение, при котором по концентрическим (центры которых лежат на одной оси) окружностям движутся все точки тела в соответствии с правилом для вращательного движения материальной точки.
Пусть произвольное твердое тело T совершает вращения вокруг оси O, которая перпендикулярна плоскости рисунка. Выберем на данном теле точку M. При вращении эта точка будет описывать вокруг оси O круг радиусом r.
Через некоторое время радиус повернется относительно исходного положения на угол Δφ.
За положительное направление поворота принято направление правого винта (по часовой стрелке). Изменение угла поворота со временем называется уравнением вращательного движения твердого тела:
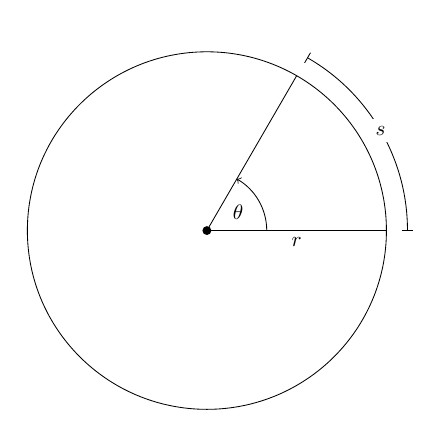
Если φ измерять в радианах (1 рад - это угол, соответствующий дуге, длиной равной ее радиусу), то длина дуги окружности ΔS, которую пройдет материальная точка M за время Δt, равна:
Основные элементы кинематики равномерного вращательного движения
Мерой перемещения материальной точки за небольшой промежуток времени dt служит вектор элементарного поворота dφ.
Угловая скорость материальной точки или тела - это физическая величина, которая определяется отношением вектора элементарного поворота к продолжительности этого поворота. Направление вектора можно определить правилом правого винта вдоль оси О. В скалярном виде:
Если ω = dφ/dt = const, то такое движение называется равномерное вращательное движение. При нем угловую скорость определяют по формуле
Согласно предварительной формуле размерность угловой скорости
Равномерное вращательное движение тела можно описать периодом вращения. Период вращения T - физическая величина, определяющая время, за которое тело вокруг оси вращения выполняет один полный оборот ([T] = 1 с). Если в формуле для угловой скорости принять t = T, φ = 2 π (полный один оборот радиуса r), то
поэтому период вращения определим следующим образом:
Число оборотов, которое за единицу времени совершает тело, называется частотой вращения ν, которая равна:
Единицы измерения частоты: [ν]= 1/c = 1 c -1 = 1 Гц.
Сравнивая формулы для угловой скорости и частоты вращения, получим выражение, связывающее эти величины:
Основные элементы кинематики неравномерного вращательного движения
Неравномерное вращательное движение твердого тела или материальной точки вокруг неподвижной оси характеризует его угловая скорость, которая изменяется со временем.
Вектор ε, характеризующий скорость изменения угловой скорости, называется вектором углового ускорения:
Если тело вращается, ускоряясь, то есть dω/dt > 0, вектор имеет направление вдоль оси в ту же сторону, что и ω.
Если вращательное движение замедлено - dω/dt 2 /r = ω 2 r 2 /r.
Итак, в скалярном виде
Тангенциальное ускоренной материальной точки, которая выполняет вращательное движение
Момент импульса материальной точки
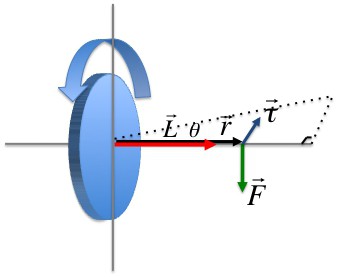
Векторное произведение радиуса-вектора траектории материальной точки массой mi на ее импульс называется моментом импульса этой точки касательно оси вращения. Направление вектора можно определить, воспользовавшись правилом правого винта.
Момент импульса материальной точки (Li) направлен перпендикулярно плоскости, проведенной через ri и υi, и образует с ними правую тройку векторов (то есть при движении с конца вектора ri к υi правый винт покажет направление вектора Li).
В скалярной форме
Учитывая, что при движении по кругу радиус-вектор и вектор линейной скорости для i-й материальной точки взаимно перпендикулярные,
Так что момент импульса материальной точки для вращательного движения примет вид
Момент силы, которая действует на i-ю материальную точку
Векторное произведение радиуса-вектора, который проведен в точку приложения силы, на эту силу называется моментом силы, действующей на i-ю материальную точку относительно оси вращения.
В скалярной форме
Величина li, равная длине перпендикуляра, опущенного из точки вращения на направление действия силы, называется плечом силы Fi.
Динамика вращательного движения
Уравнение динамики вращательного движения записывается так:
Формулировка закона следующая: скорость изменения момента импульса тела, которое совершает вращение вокруг неподвижной оси, равна результирующему моменту относительно этой оси всех внешних сил, приложенных к телу.
Момент импульса и момент инерции
Известно, что для i-й материальной точки момент импульса в скалярной форме задается формулой
Если вместо линейной скорости подставить ее выражение через угловую:
то выражение для момента импульса примет вид
Величина Ii = miri 2 называется моментом инерции относительно оси i-й материальной точки абсолютно твердого тела, проходящей через его центр масс. Тогда момент импульса материальной точки запишем:
Момент импульса абсолютно твердого тела запишем как сумму моментов импульса материальных точек, составляющих данное тело:
Момент силы и момент инерции
Закон вращательного движения гласит:
Известно, что представить момент импульса тела можно через момент инерции:
Учитывая, что угловое ускорение определяется выражением
получим формулу для момента силы, представленного через момент инерции:
Замечание. Момент силы считается положительным, если угловое ускорение, которым он вызван, больше нуля, и наоборот.
Теорема Штейнера. Закон сложения моментов инерции
Если ось вращения тела через центр масс его не проходит, то относительно этой оси можно найти его момент инерции по теореме Штейнера:
I = I0 + ma 2 ,
где I0 - начальный момент инерции тела; m - масса тела; a - расстояние между осями.
Если система, которая совершает обороты округ неподвижной оси, состоит из n тел, то суммарный момент инерции такого типа системы будет равен сумме моментов, ее составляющих (закон сложения моментов инерции).
Первые два из них – простейшие, а остальные представляют как комбинацию основных движений.
Поступательное криволинейное движение. Угол поворота тела
Поступательным называют движение твердого тела, при котором любая прямая, проведенная в нем, двигается, оставаясь параллельной своему начальному направлению.
Прямолинейное движение является поступательным, но не всякое поступательное будет прямолинейным. При наличии поступательного движения путь тела представляют в виде кривых линий.

Рисунок 1 . Поступательное криволинейное движение кабин колеса обзора
Свойства поступательного движения определяются теоремой: при поступательном движении все точки тела описывают одинаковые траектории и в каждый момент времени обладают одинаковыми по модулю и направлению значениями скорости и ускорения.
Следовательно, поступательное движение твердого тела определено движением любой его точки. Это сводится к задаче кинематики точки.
Если имеется поступательное движение, то общая скорость для всех точек тела υ → называется скоростью поступательного движения, а ускорение a → - ускорением поступательного движения. Изображение векторов υ → и a → принято указывать приложенными в любой точке тела.
Понятие о скорости и ускорении тела имеют смысл только при наличии поступательного движения. В других случаях точки тела характеризуются разными скоростями и ускорениями.
Вращательное движение абсолютно твердого тела вокруг неподвижной оси – это движение всех точек тела, находящихся в плоскостях, перпендикулярных неподвижной прямой, называемой осью вращения, и описывание окружностей, центры которых располагаются на этой оси.
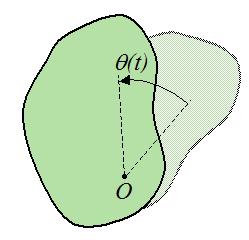
Чтобы определить положение вращающегося тела, необходимо начертить ось вращения, вдоль которой направляется ось A z , полуплоскость – неподвижную, проходящую через тело и движущуюся с ним, как показано на рисунке 2 .

Рисунок 2 . Угол поворота тела
Положение тела в любой момент времени будет характеризоваться соответствующим знаком перед углом φ между полуплоскостями, который получил название угол поворота тела. При его откладывании, начиная от неподвижной плоскости (направление против хода часовой стрелки), угол принимает положительное значение, против плоскости – отрицательное. Измерение угла производится в радианах. Для определения положения тела в любой момент времени следует учитывать зависимость угла φ от t , то есть φ = f ( t ) . Уравнение является законом вращательного движения твердого тела вокруг неподвижной оси.
При наличии такого вращения значения углов поворота радиус-вектора различных точек тела будут аналогичны.
Вращательное движение твердого тела характеризуется угловой скоростью ω и угловым ускорением ε .
Уравнения вращательного движения получают из уравнений поступательного, используя замены перемещения S на угловое перемещение φ , скорость υ на угловую скорость ω , а ускорение a на угловое ε .
Вращательное и поступательное движение. Формулы
| Поступательное | Вращательное |
| Равномерное | |
| s = υ · t | φ = ω · t |
| υ = c o n s t | ω = c o n s t |
| a = 0 | ε = 0 |
| Равнопеременное | |
| s = υ 0 t ± a t 2 2 | φ = ω 0 t ± ε · t 2 2 |
| υ = υ 0 ± a · t | ω = ω 0 ± ε · t |
| a = c o n s t | ε = c o n s t |
| Неравномерное | |
| s = f ( t ) | φ = f ( t ) |
| υ = d s d t | ω = d φ d t |
| a = d υ d t = d 2 s d t 2 | ε = d ω d t = d 2 φ d t 2 |
Задачи на вращательное движение
Дана материальная точка, которая движется прямолинейно соответственно уравнению s = t 4 + 2 t 2 + 5 . Вычислить мгновенную скорость и ускорение точки в конце второй секунды после начала движения, среднюю скорость и пройденный за этот промежуток времени путь.
Дано: s = t 4 + 2 t 2 + 5 , t = 2 с .
Найти: s ; υ ; υ ; α .
Решение
s = 2 4 + 2 · 2 2 + 5 = 29 м .
υ = d s d t = 4 t 3 + 4 t = 4 · 2 3 + 4 · 2 = 37 м / с .
υ = ∆ s ∆ t = 29 2 = 14 , 5 м / с .
a = d υ d t = 12 t 2 + 4 = 12 · 2 2 + 4 = 52 м / с 2 .
Ответ: s = 29 м ; υ = 37 м / с ; υ = 14 , 5 м / с ; α = 52 м / с 2
Задано тело, вращающееся вокруг неподвижной оси по уравнению φ = t 4 + 2 t 2 + 5 . Произвести вычисление мгновенной угловой скорости, углового ускорения тела в конце 2 секунды после начала движения, средней угловой скорости и угла поворота за данный промежуток времени.
Дано: φ = t 4 + 2 t 2 + 5 , t = 2 с .
Найти: φ ; ω ; ω ; ε .
Решение
φ = 2 4 + 2 · 2 2 + 5 = 29 р а д .
ω = d φ d t = 4 t 3 + 4 t = 4 · 2 3 + 4 · 2 = 37 р а д / с .
ω = ∆ φ ∆ t = 29 2 = 14 , 5 р а д / с .
ε = d ω d t = 12 2 + 4 = 12 · 2 2 + 4 = 52 р а д / с 2 .
Ответ: φ = 29 р а д ; ω = 37 р а д / с ; ω = 14 , 5 р а д / с ; ε = 52 р а д / с 2 .
Вращательное движение твердого тела – движение, при котором все точки объекта описывают траекторию в виде окружности.
Распространенный случай в физике – вокруг покоящейся оси (рис. 1).

Рис. 1 Вращение твердого тела вокруг оси
Линия, соединяющая неподвижные точки, читается осью вращения. Кинематика перемещения в целом аналогична поступательной. Только путь измеряется не в метрах, а в радианах или градусах.
Последние связаны между собой следующей формулой:
ϕ – угол в радианах (рад);
γ – угол в градусах (°).
Закон и уравнение вращательного движения твердого тела
Законы движения также схожи. Для равноускоренного движения:

ϕ0 – начальный угол (рад);
ω0 – начальная угловая скорость (рад/с);
ε – угловое ускорение (рад/с 2 ).
Под положительным понимают перемещение против часовой стрелки.
Угловая скорость
В обычной жизни вращение оценивается в оборотах за единицу времени. За минуту чаще всего. Для расчетов такие характеристики неудобны. Поэтому определяется так:

Скорость в оборотах ν легко связать с угловой:

ν – скорость в оборотах (1/с).
Используется еще одна важная величина – период вращения T. За это время предмет совершает полный поворот:

Угловое ускорение

В уравнении движения был показан частный случай равноускоренного перемещения. Но это не всегда так. Также ε может принимать отрицательные значения в случае замедления.
Линейные величины
При малых величинах пройденный путь (см. рис. 2) будет равен:
где r – расстояние до центра вращения (м).

Рис. 2 Перемещение
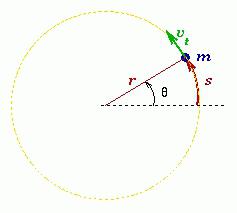
Откуда следует линейная скорость:
Вектор, перпендикулярный отрезку, r. То есть расположенный на касательной к окружности вращения.
И, соответственно, ускорение:
Кроме того, передвижение по кривой линии невозможно без центростремительного ускорения:
Возвратно-вращательное движение
Общий случай раскачивания маятника. Анализ подобных противоположных телодвижений пары объектов порождает некоторые парадоксы.
Приверженцы таких рассуждений существуют и доводы имеют право на жизнь. Не все общепринятые взгляды безупречны. Евклидова геометрия тому пример. Теория довольно запутана, и здесь мы ее рассматривать не будем.
С учетом масс
Представив себе, что тело состоит из незначительных масс mi, получим любопытные результаты. Кинетическая энергия выразится так:

Джоуль (Дж) – единица энергии и работы в системе СИ.
Моментом инерции относительно выбранной оси называется:
или в соответствующей интегральной форме.
Тогда энергия выразится следующим образом:
То есть имеется некий аналог массы. Но последняя является неизменной присущей объекту величиной. Момент же инерции зависит от местонахождения оси.
В реальных условиях распространен случай вращения вокруг оси, включающей центр масс. Найдем его для системы, указанной на рис. 3.

Рис. 3 Определение центра масс.
Определится по формулам:
Вектор, направленный из начала координат в центр масс, в общем случае выразится следующим образом:
Можно перевести в интегральную форму. В присутствии гравитации – заодно и центр тяжести.
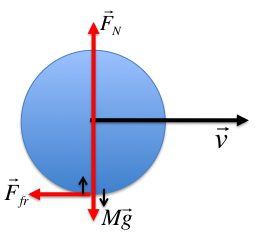
Можно сказать, что общее движение предмета включает поступательное и вращательное. Пример – качение чего-то округлого (рис. 4). При этом все перемещение точек можно исчерпывающе изобразить на рисунке. В таком варианте движение называется плоским.
Полная кинетическая энергия равна:

m – масса объекта;
IC – момент инерции относительно оси, включающей центр масс.

Рис. 4 Качение колеса
Частные случаи вращательного движения
1. Равномерное (рис. 5), с постоянной скоростью, с нулевым ускорением.
Выражается уравнением: φ = φ0 + ωt

Рис. 5 При ε = 0.
2. Равноускоренное. Рассмотрено ранее. Но все же уместны некоторые пояснения (рис. 6).

Рис. 6 ε = const.
3. Вокруг неподвижной оси. Наиболее распространенный в рассмотрении вариант. Как для реальных нужд, так и в теории.
4. Возвратно-вращательное. В математическом выражении напоминает колебания. При подробном рассмотрении вызывает неудобные вопросы.
Заключение
Для разработчиков оборудования тема отнюдь не праздная. Рассматриваются задачи по передаче силового момента (в частности в ременных механизмах). Разбирается механика работы подшипников, гироскопов.
В артиллерии снаряды стабилизируются вращением. Да и расчеты их на прочность связаны со сложным напряженным состоянием в связи с раскручиванием в стволе.
Орбиты планет имеют отношение к рассматриваемой кинематике.
На самом деле все сферы использования данной темы невозможно перечислить, это действительно нужный раздел.
Читайте также: