
Элементы кинематики механизмов конспект
Обновлено: 16.05.2024
Кинематическая схема – это схема, на которой показана последовательность передачи движения от двигателя через передаточный механизм к рабочим органам машины и из взаимосвязь.
На кинематических схемах изображают только те элементы машины или механизма, которые принимают участие в передаче движения без соблюдения размеров и пропорций.
Все элементы на схеме обозначают условными графическими обозначениями согласно ГОСТ 2.770-68 ЕСКД Обозначения условные графические в схемах.
Кинематические схемы выполняют в соответствии с требованиями
ГОСТ 2.703-2011 ЕСКД Правила выполнения кинематических схем.
Читать кинематическую схему начинают от двигателя, как источника движения всех подвижных деталей механизма. На схеме он обозначается, как правило, окружностью с буквой М в середине.
Определяя последовательно по условным обозначениям каждый элемент кинематической цепи, устанавливают его назначение и характер передачи движения.
Основные условные обозначения
| Наименование | Обозначение |
| Вал, валик, ось, стержень, шатун и т.п. |  |
| Подшипники скольжения и качения на валу (без уточнения типа) |  |
| Муфта. Общее обозначение без уточнения типа |  |
| Передачи фрикционные: а) с цилиндрическими роликами |  |
| Передача ремнем без уточнения типа ремня |  |
| Передача плоским ремнем |  |
| Передача клиновым ремнем |  |
| Наименование | Обозначение |
| Передача круглым ремнем |  |
| Передача зубчатым ремнем |  |
| Передача цепью, общее обозначение без уточ- нения типа цепи |  |
| Передачи зубчатые (цилиндрические): а) внешнее зацепление (общее обозначение без уточнения тина зубьев) |  |
| б) то же, с прямыми, косыми и шевронными зубьями |  |
| Передачи зубчатые с пересекающимися валами, конические |  |
| Наименование | Обозначение |
| Передачи зубчатые со скрещивающимися валами: а) червячные с цилиндрическим червя ком | 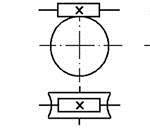 |
| б) червячные глобоидные |  |
| Передача винт-гайка |  |
| Электродвигатель |  |
Пример описания кинематической схемы:

Вращательное движение от электродвигателя 1 через муфту(упругую) 2 передается на вал Ӏ с зубчатым колесом 3 ( обычно это шестерня), которое зацепляется с зубчатым колесом 4 второго вала ӀӀ. Зубчатая передача является цилиндрической косозубой и расположена в корпусе 5. На вал ӀӀ насажен звездочка 6 цепной передачи. С помощью цепи движение передается на выходной вал ӀӀӀ через вторую звездочку. Опорами валов являются подшипники.
Кинематическая схема – это схема, на которой показана последовательность передачи движения от двигателя через передаточный механизм к рабочим органам машины и из взаимосвязь.
На кинематических схемах изображают только те элементы машины или механизма, которые принимают участие в передаче движения без соблюдения размеров и пропорций.
Все элементы на схеме обозначают условными графическими обозначениями согласно ГОСТ 2.770-68 ЕСКД Обозначения условные графические в схемах.
Кинематические схемы выполняют в соответствии с требованиями
ГОСТ 2.703-2011 ЕСКД Правила выполнения кинематических схем.
Читать кинематическую схему начинают от двигателя, как источника движения всех подвижных деталей механизма. На схеме он обозначается, как правило, окружностью с буквой М в середине.
Определяя последовательно по условным обозначениям каждый элемент кинематической цепи, устанавливают его назначение и характер передачи движения.
Основные условные обозначения
| Наименование | Обозначение |
| Вал, валик, ось, стержень, шатун и т.п. | |
| Подшипники скольжения и качения на валу (без уточнения типа) | |
| Муфта. Общее обозначение без уточнения типа | |
| Передачи фрикционные: а) с цилиндрическими роликами | |
| Передача ремнем без уточнения типа ремня | |
| Передача плоским ремнем | |
| Передача клиновым ремнем | |
| Наименование | Обозначение |
| Передача круглым ремнем | |
| Передача зубчатым ремнем | |
| Передача цепью, общее обозначение без уточ- нения типа цепи | |
| Передачи зубчатые (цилиндрические): а) внешнее зацепление (общее обозначение без уточнения тина зубьев) | |
| б) то же, с прямыми, косыми и шевронными зубьями | |
| Передачи зубчатые с пересекающимися валами, конические | |
| Наименование | Обозначение |
| Передачи зубчатые со скрещивающимися валами: а) червячные с цилиндрическим червя ком | |
| б) червячные глобоидные | |
| Передача винт-гайка | |
| Электродвигатель | |
Пример описания кинематической схемы:

Вращательное движение от электродвигателя 1 через муфту(упругую) 2 передается на вал Ӏ с зубчатым колесом 3 ( обычно это шестерня), которое зацепляется с зубчатым колесом 4 второго вала ӀӀ. Зубчатая передача является цилиндрической косозубой и расположена в корпусе 5. На вал ӀӀ насажен звездочка 6 цепной передачи. С помощью цепи движение передается на выходной вал ӀӀӀ через вторую звездочку. Опорами валов являются подшипники.
- Для учеников 1-11 классов и дошкольников
- Бесплатные сертификаты учителям и участникам
ТЕМА 1.1 Кинематика
Основные понятия кинематики
МЕХАНИКА — раздел физики, который изучает механическое движение и причины, вызывающие это движение, а так же взаимодействие тел.
МЕХАНИЧЕСКОЕ ДВИЖЕНИЕ — изменение во времени и пространстве расположения тел или их частей относительно друг друга.
КИНЕМАТИКА – раздел механики, изучающий механическое движение тел без учета причин, вызывающих это движение.
МАТЕРИАЛЬНАЯ ТОЧКА — тело, формой и размерами которого в условиях данной задачи можно пренебречь.
СИСТЕМОЙ ОТСЧЕТА назовем совокупность системы координат и часов.
Движение тела связано с его перемещением в пространстве.

Положение материальной точки на плоскости в некоторый момент времени в декартовой системе координат задается радиус-вектором .
ТРАЕКТОРИЯ – линия, которую материальная точка описывает в пространстве при движении.
ПРОЙДЕННЫЙ ПУТЬ (длина пути) s – длина участка траектории, пройденного за определенный промежуток времени.
ПЕРЕМЕЩЕНИЕ – вектор, соединяющий начальное и конечное положение тела.
2) Поступательное и вращательное движение
ПОСТУПАТЕЛЬНОЕ ДВИЖЕНИЕ — это движение, при котором любая прямая, связанная с телом, остается параллельной первоначальному положению.
ВРАЩАТЕЛЬНОЕ ДВИЖЕНИЕ — это движение, при котором все точки тела движутся по окружностям, центры которых лежат на одной прямой, называемой осью вращения.
СКОРОСТЬ — векторная величина, определяющая быстроту движения и направление в определенный момент времени.
Вектор средней скорости определяется так:
Скорость в определенный момент времени называется МГНОВЕННОЙ СКОРОСТЬЮ, которая направлена всегда по касательной к траектории.
УСКОРЕНИЕ — векторная величина, определяющая быстроту изменения скорости по модулю и направлению.
Среднее ускорение определяется так:
3) Равномерное прямолинейное движение
РАВНОМЕРНОЕ ПРЯМОЛИНЕЙНОЕ ДВИЖЕНИЕ – это движение, при котором тело, двигаясь вдоль одного направления, за равные промежутки времени совершает одинаковые перемещения, т.е. скорость тела остается неизменной.
Уравнение равномерного движения имеет вид:
По графику зависимости скорости от времени путь, пройденный телом за промежуток времени, определяется как площадь фигуры под кривой.
Рассмотрим движение тела относительно двух систем отсчета: системы координат, связанной с подвижной платформой, и системы координат, связанной с Землей. Пусть эти системы движутся друг относительно друга равномерно и прямолинейно.

КЛАССИЧЕСКИЙ ЗАКОН СЛОЖЕНИЯ СКОРОСТЕЙ: скорость тела относительно неподвижной системы отсчета равна скорости тела относительно подвижной системы отсчета плюс скорость самой подвижной системы:
ЗАМЕЧАНИЕ 1: Если относительное движение происходит в произвольном направлении, то закон сложения скоростей записывается для проекций.
ЗАМЕЧАНИЕ 2: Для двух тел, движущихся с определенными скоростями относительно неподвижной системы координат закон будет звучать так: скорость второго тела относительно первого равна разности скорости второго тела относительно неподвижной системы координат и скорости первого тела относительно неподвижной системы координат .
4) Равнопеременное прямолинейное движение.
РАВНОПЕРЕМЕННОЕ ПРЯМОЛИНЕЙНОЕ ДВИЖЕНИЕ – это движение с постоянным ускорением.
Движение тела с постоянным ускорением, при котором модуль скорости тела увеличивается со временем, называется равноускоренным , в противном случае равнозамедленным .
Радиус-вектор при таком движении определяется так:
ЗАМЕЧЕНИЕ: при решении задач указанные уравнения проецируются на необходимые оси координат.
5) Движение тела, брошенного вертикально вверх и под углом к горизонту.
СВОБОДНОЕ ПАДЕНИЕ – движение тела в безвоздушном пространстве только под действием гравитационных сил.
Движение тела, брошенного вертикально вверх, с некоторой начальной скоростью, происходит только вдоль оси Y . Поэтому уравнения зависимости координаты и скорости от времени в проекциях на ось Y имеют вид:
Рассмотрим движение тела, брошенного под углом к горизонту .

Соответствующие уравнения имеют вид:
Учитывая эти уравнения получаем:
Время подъема:
Максимальная высота подъема:
Дальность полета:
6) Движение материальной точки по окружности с постоянной по модулю скоростью
Пусть материальная точка двигаясь окружности перемещается из точки A в точку B .
При постоянном модуле скорости направление вектора стремится к центру, а значит и ускорение также направлено к центру. Это ускорение называю ЦЕНТРОСТРЕМИТЕЛЬНЫМ или НОРМАЛЬНЫМ:
ПЕРИОД ВРАЩЕНИЯ — время, в течение которого материальная точка проходит окружность.
ЧАСТОТА ВРАЩЕНИЯ — число оборотов материальной точки за 1 секунду.
Период и частота вращения связаны соотношением:
ЛИНЕЙНАЯ СКОРОСТЬ — величина, определяемая отношением длины дуги окружности ко времени, в течение которого эта дуга будет пройдена
УГЛОВАЯ СКОРОСТЬ — величина, определяемая отношением угла поворота тела ко времени, за которое произошел этот поворот, причем:
Зависимость угловой и линейной скорости:
где R – радиус окружности, по которой происходит движение.
Сила, с которой действует удерживающее тело (связь) на вращающееся тело, называется ЦЕНТРОСТРЕМИТЕЛЬНОЙ СИЛОЙ (эта сила приложена к вращающемуся телу и направлена по радиусу к центру вращения).
Сила, с которой действует вращающееся тело на удерживающее тело (связь), называется ЦЕНТРОБЕЖНОЙ СИЛОЙ (эта сила приложена к удерживающему телу и направлена по радиусу от центра вращения).
ЗАМЕЧАНИЕ: если тело движется неравномерно по произвольной траектории, то вектор полного ускорения представляется в виде суммы нормального и тангенциального ускорения (касательное ускорение):
Для полного понимания последовательности работы отдельных элементов созданного агрегата разрабатывается специальная схема взаимодействия. Схема кинематическая позволяет не только определить структуру всего агрегата, но и характер взаимодействия отдельных элементов. Она является своеобразным описанием его работы. Например, описание кинематической схемы станка включает все его элементы, способы соединения, принципы взаимодействия и точность работы каждой детали и конструкции в целом.

По назначению и выполняемым функциям схемы делятся на следующие типы:
- функциональные (поясняют основные функции каждой детали и всего механизма);
- структурные (предназначены для представления структуры всего агрегата);
- принципиальные (показывают последовательность различных связей между отдельными деталями).
Элементы, наносимые на чертёж, имеют стандартные обозначения. Зная назначения каждого из них можно понять особенности работы конкретного станка или агрегата.
Правила выполнения схем
Выполнение графических изображений кинематических схем производиться с использованием следующих правил:
- выбор правильного обозначения применяемой конструкции;
- точное указание места расположения отдельной детали;
- последовательность их взаимодействия;
- ширина линий (устанавливается существующими стандартами);
- правильность отображения сносок;
- нанесение необходимых надписей и символов.
Правила выполнения кинематических схем заключаются в описании следующих конструктивных единиц:
- отдельных элементов;
- линий кинематических связей;
- звеньев;
- кинематических пар (объединяют две или несколько элементов).
Разработчик вправе выбирать масштаб по своему усмотрению.Это разрешено утверждёнными стандартами. На чертеже допускается не соблюдение реального расположения конструктивных составляющих в корпусе агрегата.

Отдельной составляющей схемы считается блок (устройство, агрегат). Он предназначен для выполнения определённых функций. Его особенностью является не возможность деления на более мелкие детали без потери функционального назначения. Такими элементами являются: набор шестерён, один или несколько валов, установленные подшипники, используемый электродвигатель.
Линией связи между деталями обозначаются отрезком заданной длины и толщины. Он указывает на присутствие механизма связи между отдельными изделиями или устройствами. Если эта связь выполнена достаточно жёстко, конструкция объединяется в звено. Объединённые детали и звенья в единое целое называется установкой.
Для более подробного описания взаимодействующих элементов или звеньев, передачи направления движения допускается их объединение в так называемые кинематические пары. Особенности и порядок выполнения графических изображений зависит от их назначения.
На функциональных схемах отображают отдельные детали конструкции, которые задействованы в основном процессе передачи движения. Для удобства (по возможности) несколько деталей объединяют в отдельные функциональные группы. На чертеже обязательно отображают их функциональные связи. Каждый из них имеет собственный графический символ. Он установлен существующими стандартами и правилами оформления чертежей. Для лучшего понимания проходящего технологического процесса рекомендуется наносить технические характеристики использованных комплектующих. Кроме пояснительных надписей допускается размещение на свободном месте листа таблиц или диаграммы.

На принципиальных схемах отображают детали или их группы. Это могут быть, валы, передаточные механизмы или готовый двигатель. Они дают представление и понимание используемых принципов работы всего агрегата. Каждая деталь или узел изображается в отключённом состоянии (без указания порядка взаимодействия с другими деталями). Их составляются для проведения регулировок и отладки собранного агрегата. С этой целью изображаются все основные кинематические связи: механические и не механические. Эти связи наносятся между отдельными элементами, кинематическими парами или группами элементов. Графически они располагаются в границах контура, обозначающего корпус агрегата. Чертёж каждого механизма, состоящего из нескольких комплектующих, может исполняться отдельным документом. На основном листе делается соответствующая ссылка. Если в составе отдельного агрегата или целого устройства применяют несколько одинаковых деталей, допускается выполнение одного чертежа. Остальные изображаются с допустимыми упрощениями. Положение комплектующих изделий может быть выбрано на основании наиболее оптимального процесса взаимодействия. Если этого недостаточно разрешается изобразить пунктирными линиями конечное положение детали.
Для лучшего понимания разрешается переносить элементы по поверхности листа. Обязательным условием является сохранение кинематических и функциональных связей. При нехватке места на поле чертежа в рамках границ корпуса агрегата, допускается отдельную деталь вынести за границы. В этом случае обязательно должны быть выполнены пояснения для ссылок. Они должны обеспечивать сохранение кинематических связей.
На принципиальной схеме обязательно указывают:
- максимально допустимое число оборотов вращающихся валов, передаточных звеньев;
- допустимое отклонение детали от исходного состояния;
- справочные таблицы;
- графики и диаграммы;
- характеристики, полученные расчётным путём на этапе проектирования;
- надписи, для пояснения специфики отдельных изделий или кинематических пар.
Схема,разработанная для пояснения протекающих динамических процессов, включает размеры каждого изделия с указанием допустимых значений механических нагрузок. На ней подробно наносят характеристики валов, места расположения, применяемых опор. При пересечении различных деталей необходимо сохранять неразрывность начерченных линий. При наложении изображений различных конструкций дальнюю изображают как невидимую. Все линии и фигуры исполняются по правилам чертежной графики.
На кинематических схемах отображают:
- сплошными линиями установленной толщины –вращающиеся детали;
- линиями тоньше на половину–конструкции, которые указываются с упрощениями, например, червячные передачи или зубчатые колёса;
- взаимосвязи между отдельными составляющими, особенно кинематическими парами,выполняют пунктирными линиями;
- указание взаимосвязи между двигателем и передаточными механизмами–двойными пунктирными линиями;
- все связи, полученные расчётным путём, на этапе проектирования,при доработке наносятся тройными пунктирными линиями.
Кинематическим группам присваивают наименования. Оно поясняет тип и функциональное назначение. Могут быть указаны особенности привода подачи или специфику червячной передачи. Все эти пояснения делаются как вынесенные надписи на специально изображённой полке. Все эти надписи могут быть объединены в отдельный перечень. В нём делаются специальные пометки, указывающие на характеристики известные из справочников и стандартов, полученные расчётным путём и характеристики, получаемые в процессе отладки и регулировки всего механизма. В этом случае такие параметры помечаются специальной надписью, которая указывает, что они подбираются при регулировании.
Регламентирующие документы
Порядок и правила обозначения всех деталей, из которых состоит механизм,на всех типах схем установлены принятыми государственными стандартами. Эти правила, регламентируют порядок оформления графических элементов (фигур, надписей, обозначений)на кинематических схемах. Они являются обязательными для выполнения чертежей для любых механизмов и агрегатов.

В этот перечень входят:
- стандарт, определяющий перечень основных типов пояснительных надписей – ГОСТ 104-68;
- ГОСТ 2.701-84, включает пояснение основных видов и типов разрабатываемых схем;
- перечень установленных обозначений, разрешенных для использования ГОСТ 2.721–74;
- список обозначений: условные графические и общего назначения ГОСТ 2.747–68;
Они определяют место расположения и правила графического изображения (выбор толщины линий, формы значков, изображение сносок).
Область применения
Для понимания взаимосвязей отдельных деталей в полной структуре агрегата составляются кинематические схемы. На них отображают последовательность передачи различных видов перемещения деталей: вращательного или поступательного движения. Например, можно последовательно проследить передачу вращения от электродвигателя через передаточные звенья к конечному устройству.
Например, кинематическая схема токарного станка наглядно показывает, как передаётся вращательное движение якоря двигателя, к редуктору и к исполнительному механизму (передней бабке). На ней отображается путь поступательного движения подачи заготовки и режущего инструмента. На каждой схеме все детали машин объединены в единый стройный механизм.
Подобные схемы позволяют понять принцип работы самых сложных механизмов. К таким системам относится газораспределительный механизм (ГРМ) двигателей внутреннего сгорания. При рассмотрении системы сжатия педального механизма можно определить физические параметры каждого элемента, величину и направление сил действующих на них.
Важное значение имеют подробные кинематические схемы, составленные для комплексных обрабатывающих центров. Схемы механизмов типа бипод обладают гибридной кинематической структурой. Они объединяют: станину, механизмы параллельной кинематики, систему удержания заготовок и подачи режущего инструмента. Механизм подачи инструмента специальный многоцелевой механизм для содержания различного режущего инструмента и подачи его в необходимое время к поверхности заготовки для осуществления обработки поверхности.
Чтение кинематических схем
Система отечественных стандартов определяет перечень и правила обозначения каждой используемой детали. Таких изображений существует более двух сотен.Все знаки располагаются с соблюдением последовательности передачи движения от элемента к элементу. Они имеют своё графическое изображение. Например, подшипники качения и скольжения обозначаются двумя параллельными линиями заданной толщины. Муфта отображается в виде системы зубьев, которые входят в зацепление. В зависимости от применяемого знака, можно определить, какая муфта изображена: предохранительная или кулачковая.

Для станков, вал обозначается длиной сплошной линией, на котором располагаются различные элементы. Обозначение червячной передачи позволяет определить направление передачи обоих видов движений: поступательного и вращательного.
Для удобства чтения кинематической схемы любого оборудования все элементы нумеруются. Нумерация производится последовательно, начиная от двигателя и заканчивая конечным элементом. В соответствие с требованиями ЕСКД валы могут быть пронумерованы римскими цифрами, а остальные элементы схемы арабскими. Графические изображения (надписи или пояснения) располагают с помощью линий выноса. Каждая заканчивается небольшим отрезком (полкой) над которым наносят необходимые надписи. Их размещают на любом удобном свободном пространстве.
Чтение названий осуществляется на основании принятых наименований.Каждое имеет свою аббревиатуру. Она состоит из одной заглавной буквы и одной цифры. Вид обозначается заглавными буквами, например,К – кинематические, Г – гальванические. Тип цифрами, например, 1 – структурные, 2 – функциональные, 3 – принципиальные. Более подробный перечень таких обозначений можно найти в соответствующих таблицах. Таким образом, название может состоять из нескольких обозначений: ЭЗ – это схема электрическая принципиальная; К3 – кинематическая принципиальная.
В твердом теле скорости точек распределяются таким образом, что проекции скоростей двух точек на прямую, их соединяющую, равны между собой (кинематическое определение твердого тела).
ВРАЩЕНИЕ ВОКРУГ НЕПОДВИЖНОЙ ОСИ
Вращением вокруг неподвижной оси называется такое движение твердого тела, при котором во все время движения две его точки остаются неподвижными. Прямая, проходящая через эти точки.
ВИНТОВОЕ ДВИЖЕНИЕ
Сочетание вращательного движения твердого тела с поступательным в направлении оси вращения называется винтовым движением. Различается правое (рис. 1, а) и левое (.
ПЛОСКОПАРАЛЛЕЛЬНОЕ ДВИЖЕНИЕ
Плоскопараллельным движением твердого тела называется движение, при котором все точки тела движутся в плоскостях, параллельных некоторой неподвижной плоскости. Это движение определяется движением плоской фигуры -.
СФЕРИЧЕСКОЕ ДВИЖЕНИЕ ТЕЛА
Сферическим движением (движением тела с одной закрепленной точкой) называется такое движение тела, при котором одна его точка О остается неподвижной во все время движения. .
ОБЩИЙ СЛУЧАЙ ДВИЖЕНИЯ ТВЕРДОГО ТЕЛА
Движение твердого тела в общем случае определяется как сумма двух движений: поступательного вместе с произвольно выбранным полюсом О и сферического движения относительно этого полюса. Уравнения .
СЛОЖЕНИЕ МГНОВЕННЫХ ДВИЖЕНИЙ ТВЕРДОГО ТЕЛА
Мгновенное движение твердого тела в общем случае определяется мотором скоростей, т. е. совокупностью свободного вектора скорости точки О, принятой за полюс, .
ЭЛЕМЕНТЫ КИНЕМАТИКИ МЕХАНИЗМОВ
ОСНОВНЫЕ ПОНЯТИЯ И ОПРЕДЕЛЕНИЯ. Подвижное соединение нескольких твердых тел называется кинематической цепью. Тела, образующие цепь, называются звеньями кинематической цепи. Простейшая цепь, состоящая .
![]()
Читайте также: