
Система регулирования это кратко
Обновлено: 08.07.2024
1. Понятие регулирования и его место в системе управления.
2. Виды регулирования.
3. Процесс регулирования и его характеристика.
Понятие регулирования и его место в системе управления.
При изучении первого вопроса первой темы, студент должен усвоить, что выявленные на основе контролирования проблемы и нарушения процесса производственно-хозяйственной деятельности, а также негативные его результаты требуют осуществления регулирования.
| Регулирование – вид управленческой деятельности, направленный на устранение отклонений, сбоев, недостатков и др. в управляемой системе путем разработки и внедрения управляющей системой соответствующих мероприятий. |
Цель регулирования - сохранение устойчивости организации путем поддержания требуемого соотношения между различными ее элементами, своевременной ликвидации возможных отклонений от установленных норм в функционировании объектов управления
Особенность регулирования состоит в том, что в отличии от функций планирования, организация и мотивирования, которые совершенствуются непосредственной в управляющей системе предприятия, регулирование, как и контролирование, совершенствуется в управляемой и управляющей системах. На рисунке 10.1 отражено графическую модель процесса регулирования под влиянием различных факторов, которые требуют изменения в планировании, организации, мотивировании.
Принципы функции регулирования.
Функция регулирования реализуется при помощи преимущественно административных методов управления. Это определяется самой сущностью функции регулирования. Она представляет собой процесс проявления властных полномочий руководителя по отношению к регулируемым объектам. Следовательно, принципы функции регулирования отражают форму проявления этих полномочий. Рассмотрим некоторые из них.
Рис. 10.1 - Регулирование деятельности организации
Принцип директивностиопределяет приемы и способы осуществления регулирующих воздействий на управляемый объект. Это наиболее жесткая форма регулирования, требующая обязательного и своевременного исполнения принятого решения. Это активная форма регулирования протекающих на предприятии процессов, побуждающая к действию исполнителей того или иного решения.
Данный принцип определяет важное требование к регулирующему воздействию - своевременность. Это требование нужно рассматривать с двух сторон: во-первых, своевременность выработки регулирующего воздействия, т. е. принятия решения по возникшей ситуации; во-вторых, своевременность реакции управляемого объекта на регулирующее воздействие, т. е. исполнение решения. Директивность также определяет неотвратимость наступления санкций в случае несвоевременного исполнения регулирующего воздействия или его неадекватного исполнения.
Принцип соблюдения регламентовопределяет соблюдение установленного заранее порядка выполнения управленческой и производственно-хозяйственной деятельности на предприятии. Это способ непрямого регулирующего воздействия на деятельность человека (в. т. ч. руководителя), который имеет распорядительную силу. Например, должностная инструкция регламентирует обязанности, ответственность и права конкретного должностного лица и тем самым регулирует сферу его деятельности. Этот принцип проявляется через регулирование пределов (свободы выбора поведения) деятельности того или иного должностного лица на предприятии. Особенностью этого принципа является обязательность соблюдения установленных регламентов. Нарушение установленных регламентов снижает организованность процессов, протекающих на предприятии, а также приводит к наступлению соответствующих санкций.
Принцип нормативности обуславливает правила регулирования условий осуществления процессов посредством организационно-методических, технических, технико-экономических, экономических, социальных норм и нормативов (стандартов). Они обеспечивают соблюдение определенных пределов управленческих действий и границ их возможных отклонений.
Виды регулирования
при изучении второго вопроса темы студент должен обратить внимание на то, что поскольку в практике управления мы имеем дело не с общим понятием регулирования, а с конкретными действиями руководителей, то возникает необходимость рассмотреть виды регулирования более детально.
Стабилизирующее регулирование –направлено на упорядочение отношений предприятия с субъектами внешней среды, а также внутренних отношений между различными его частями.
Целью стабилизирующего регулирования является установление определенных организационно-социальных правил, точных предписаний к действию, а также рамок деятельности иповедения работников предприятия. Данная цель достигается путем разработки, введения в практику и контроля соблюдения соответствующих регулирующих положений (устав, правила внутреннего распорядка, должностные инструкции и т. п.), обязательных для исполнения.
В качестве регулирующих воздействий используются правила, определяющие порядок деятельности предприятия и его частей, а также система ограничений, устанавливающих пределы и пропорции, которые должно соблюдать предприятие в процессе этой деятельности. Это уставные положения, должностные инструкции, распорядок дня, положения, определяющие порядок взаимоотношений с поставщиками, потребителями, государственными органами и т. п. Эти положения вводятся на определенный период времени и обязательны для исполнения.
Стабилизирующее регулирование, исходя из его направленности, подразделяется на три подвида: непосредственное регулирование, регулирование на основе норм и регулирование с помощью инструктирования.
1.Непосредственное регулирование осуществляется в отношении предприятия в целом, организационной структуры управления и структуры аппарата управления. К регламентирующим правилам относятся соответственно Устав предприятия, положения о линейных и функциональных подразделениях, должностные инструкции.
Особенностью регулирования на основе норм является полнота и объективность отражения условий, которые определяют поведение работников предприятия. Поэтому устанавливаемые нормы должны быть осмысленными с точки зрения восприятия сотрудниками предприятия. Менеджеры при использовании этого вида регулирования должны стремиться к тому, чтобы применяемые ими нормы были бы добровольно восприняты теми людьми, чью деятельность они регулируют. Следует также помнить, что необоснованно жесткие или неоправданно заниженные нормативы, как правило, приводят к дестимулированию, а чрезмерно детальные - снижают индивидуальность и инициативность работников.
3. Регулирование с помощью инструктированияобычно основывается на методической помощи и информационном обеспечении выполнения предстоящей работы. Инструктирование - это наставление, подробное объяснение, предупреждение, указание по соблюдению, выполнению чего-либо и т. п.
Распорядительное регулированиепредставляет собой совокупность способов и приемов, направленных на регулирование текущей работы. Это процесс непосредственного воздействия на исполнителей решений, принятых руководителем. Они реализуются путем проявления полномочий руководителем по отношению к подчиненным.
Цель распорядительного регулированиязаключается в воздействии руководителя на целенаправленное поведение объекта управления, осуществляемое в соответствии с заданной программой или условиями деятельности предприятия.
Использование распорядительного регулирования обусловлено следующими причинами:
а) необходимостью устранения отклонений от установленных стандартов, выявленных в процессе контроля;
б) необходимостью побуждения к действию для выполнения принятого управленческого решения.
Содержание распорядительного регулирования определяется конкретными причинами и возникающими ситуациями. Они, как правило, не имеют четко установленных закономерностей проявления и времени возникновения. Они являются следствием возникающих ситуаций и незапрограммированных управленческих решений.
По форме проявления распорядительное регулирование может быть представлено документально и устно. По своему содержанию распорядительные воздействия имеют различную форму.
Распорядительное регулирование оказывает как активное, так и пассивное воздействие. Так, приказы, указания, распоряжения, решения и другие формы прямого административного воздействия носят активный характер, т. е. побуждают к действию, требуют анализа ситуации, влекут за собой ответственность и дисциплину исполнения.
Пассивные формы встречаются реже в административном воздействии. Они не имеют силу обязательного, немедленного, своевременного и точного реагирования. Их основное назначение состоит в повышении эффективности коммуникаций в процессе выполнения активного регулирующего воздействия. Они часто дополняют активную форму регулирования, чем повышается их результативность.
Для эффективного регулирования менеджеру очень важно принять решение, насколько допустимы или относительно безопасны обнаруженные отклонения от стандартов. Функция контроля выдает информацию об отклонениях, которая служит основой для решения о начале регулирующих действий. Этот этап является наиболее важным и заметным в процессе регулирования. Поэтому определение масштаба допустимых отклонений - вопрос первостепенной важности для процесса регулирования. Если будет слишком большой масштаб отклонений, то возникающие проблемы могут приобрести угрожающий характер. Но, если масштаб взят слишком маленький, то предприятие будет реагировать на незначительные отклонения, что весьма накладно и требует много времени. Регулирующие действия могут парализовать деятельность предприятия. Смысл распределительного регулирования во всех случаях состоит в том, чтобы, используя информацию функции контроля, понять причины отклонения и добиться возвращения параметров процесса к требуемому образу действий.
Дисциплинарное регулированиесвязано с процессом делегирования полномочий. Сущность дисциплинарного регулирования как совокупности способов воздействия раскрывается через процесс установления ответственности. Как известно, при делегировании полномочий ответственность лишь перераспределяется между руководителем и лицом, которому делегируются полномочия. Другими словами, руководитель имеет право делегировать обязанности, права и в этих пределах возложить ответственность на подчиненного. Но при этом ответственность в полном объеме (в т. ч. и перераспределенную) руководитель оставляет за собой.
Цель дисциплинарного регулирования - развитие способностей и творческих сил у подчиненных, направленных на использование делегированных прав самостоятельно принимать управленческие решения.
Дисциплинарное регулирование проявляется в праве руководителя требовать от подчиненных:
1) конкретных результатов по определенным ключевым моментам, которые им делегированы;
2) периодического доклада о ходе выполнения заданий;
3) подробного выполнения своих инструкций и разрешение свободы действий лишь в случаях крайней необходимости;
4) буквального следования инструкциям и приказам, немедленного уведомления при появлении каких-либо затруднений.
Дисциплинарное регулирование затрагивает поведенческие аспекты функции регулирования. К сожалению, хотя большинство менеджеров понимает, что процесс регулирования - это не только передача приказов и указаний, но и возможность оказания положительного воздействия на человека, часто об этом забывают.
Ответственность, как известно, представляет собой обязательство выполнять имеющиеся задачи (в т. ч. регулирующие воздействия) и отвечать за их удовлетворительное разрешение. Ответственность всегда должна соответствовать вознаграждению. Дисциплинарное регулирование базируется на допущении, что, принимая конкретную работу и вознаграждение за нее, работники косвенным образом соглашаются выполнять ее на уровне, удовлетворительном для предприятия.
По своему содержанию дисциплинарное регулирование может иметь:
1) распорядительное воздействие. Например, приказ о поощрении или наказании по результатам деятельности конкретного сотрудника;
2) регламентирующее воздействие. Например, должностная инструкция, отражающая результаты распределения и делегирования полномочий конкретного сотрудника;
3) нормирующее воздействие. Например, норма времени (трудоемкость решения задачи) на разработку бизнес-плана.
Автоматическое регулирование — это управление технологическими процессами при помощи продвинутых устройств с заранее определенными алгоритмами.
В быту, например, автоматическое регулирование может осуществляться при помощи термостата, который измеряет и поддерживает комнатную температуру на заданном уровне.

Автоматическое регулирование
После того, как желательная температура задана, термостат автоматически контролирует комнатную температуру и включает или отключает нагреватель или воздушный кондиционер по мере необходимости, чтобы поддержать заданную температуру.
На производстве управление процессами обычно осуществляется средствами КИП и А, которые измеряют и поддерживают на необходимом уровне технологические параметры процесса, такие как: температура, давление, уровень и расход. Ручное регулирование на более-менее масштабном производстве затруднительно по ряду причин, а многие процессы вообще невозможно регулировать вручную.
Технологические процессы и переменные процесса
Некоторые из них могут понизить эффективность производства и увеличить производственные затраты. Задачей системы автоматического регулирования является минимизация производственных потерь и затрат на регулирование, связанных с произвольным изменением переменных процесса.
На любом производстве осуществляется воздействие на сырьё и другие исходные компоненты для получения целевого продукта. Эффективность и экономичность работы любого производства зависит от того, как технологические процессы и переменные процесса управляются посредством специальных систем регулирования.
Принцип работы и элементы системы автоматического регулирования
В случае системы автоматического регулирования наблюдение и регулирование производится автоматически при помощи заранее настроенных приборов. Аппаратура способна выполнять все действия быстрее и точнее, чем в случае ручного регулирования.
Действие системы может быть разделено на две части: система определяет изменение значения переменной процесса и затем производит корректирующее воздействие, вынуждающее переменную процесса вернуться к заданному значению.
Система автоматического регулирования содержит четыре основных элемента: первичный элемент, измерительный элемент, регулирующий элемент и конечный элемент.
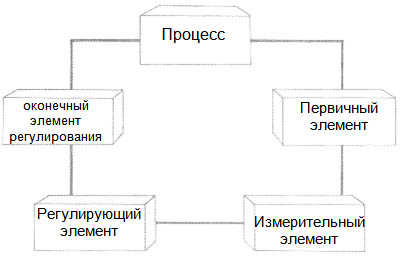
Элементы системы автоматического регулирования
Первичный элемент воспринимает величину переменной процесса и превращает его в физическую величину, которое передается в измерительный элемент. Измерительный элемент преобразовывает физическое изменение, произведенное первичным элементом, в сигнал, представляющий величину переменной процесса.
Выходной сигнал от измерительного элемента посылается к регулирующему элементу. Регулирующий элемент сравнивает сигнал от измерительного элемента с опорным сигналом, который представляет собой заданное значение и вычисляет разницу между этими двумя сигналами. Затем регулирующий элемент производит корректирующий сигнал, который представляет собой разницу между действительной величиной переменной процесса и ее заданным значением.
Выходной сигнал от регулирующего элемента посылается к конечному элементу регулирования. Конечный элемент регулирования преобразовывает получаемый им сигнал в корректирующее воздействие, которое вынуждает переменную процесса возвратиться к заданному значению.
В дополнение к четырем основным элементам, системы регулирования процессами могут иметь вспомогательное оборудование, которое обеспечивает информацией о величине переменной процесса. Это оборудование может включать такие приборы как самописцы, измерители и устройства сигнализации.
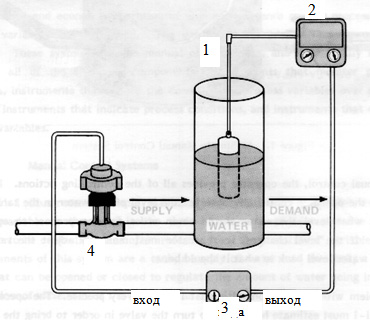
Схема простой системы автоматического регулирования
Виды систем автоматического регулирования
Имеются два основных вида автоматических систем регулирования: замкнутые и разомкнутые, которые различаются по своим характеристикам и следовательно — по уместности применения.
Замкнутая система автоматического регулирования
В замкнутой системе информация о значении регулируемой переменной процесса проходит через всю цепочку приборов и устройств, предназначенных для контроля и регулирования этой переменной. Таким образом, в замкнутой системе производится постоянное измерение регулируемой величины, её сравнение с задающей величиной и оказывается соответствующее воздействие на процесс для приведения регулируемой величины в соответствие с задающей величиной.
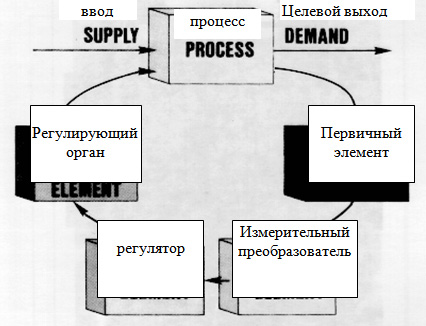
Схема замкнутой системы автоматического регулирования
Например, подобная система хорошо подходит для контроля и поддержания необходимого уровня жидкости в резервуаре. Буек воспринимает изменение уровня жидкости. Измерительный преобразователь преобразует изменения уровня в сигнал, который отправляет на регулятор. Который, в свою очередь, сравнивает полученный сигнал с необходимым уровнем, заданным заранее. После регулятор вырабатывает корректирующий сигнал и отправляет его на регулирующий клапан, который корректирует поток воды.
Разомкнутая система автоматического регулирования
В разомкнутой системе нет замкнутой цепочки измерительных и обрабатывающих сигнал приборов и устройств от выхода до входа процесса, и воздействие регулятора на процесс не зависит от результирующего значения регулируемой переменной. Здесь не производится сравнение между текущим и желаемым значением переменной процесса и не вырабатывается корректирующее воздействие.
Схема разомкнутой системы автоматического регулирования
Один из примеров разомкнутой системы регулирования — автоматическая мойка автомобилей. Это технологический процесс по мойке автомобилей и все необходимые операции чётко определены. Когда автомобиль выходит с мойки предполагается, что он должен быть чистым. Если автомобиль недостаточно чист, то система этого не обнаруживает. Здесь нет никакого элемента, который бы давал информацию об этом и корректировал процесс.
На производстве некоторые разомкнутые системы используют таймеры, чтобы гарантировать, что ряд последовательных операций выполнен. Этот вид разомкнутого регулирования может быть приемлем, если процесс не очень ответственный. Однако, если процесс требует, чтобы выполнение некоторых условий было проверено и при необходимости были бы сделаны корректировки, разомкнутая система не приемлема. В таких ситуациях необходимо применить замкнутую систему.
Методы автоматического регулирования
Системы автоматического регулирования могут создаваться на основе двух основных методов регулирования: регулирования с обратной связью, которое работает путем исправления отклонений переменной процесса после того, как они произошли; и с воздействием по возмущению, которое предотвращает возникновение отклонений переменной процесса.
Регулирование с обратной связью
Регулирование с обратной связью — это такой способ автоматического регулирования, когда измеренное значение переменной процесса сравнивается с ее уставкой срабатывания и предпринимаются действия для исправления любого отклонения переменной от заданного значения.
Система ручного регулирования с обратной связью
Основным недостатком системы регулирования с обратной связью является то, что она не начинает регулировки процесса до тех пор, пока не произойдет отклонение регулируемой переменной процесса от значения ее уставки.
Температура должна измениться, прежде чем регулирующая система начнет открывать или закрывать управляющий клапан на линии пара. В большинстве систем регулирования такой тип регулирующего действия приемлем и заложен в конструкцию системы.
В некоторых промышленных процессах, таких как изготовление лекарственных препаратов, нельзя допустить отклонение переменной процесса от значения уставки. Любое отклонение может привести к потере продукта. В этом случае необходима система регулирования, которая бы предвосхищала изменения процесса. Такой упреждающий тип регулирования обеспечивается системой регулирования с воздействием по возмущению.
Регулирование с воздействием по возмущению
Регулирование по возмущению — это регулирование с опережением, потому что прогнозируется ожидаемое изменение в регулируемой переменной и принимаются меры прежде, чем это изменение происходит.
Это фундаментальное различие между регулированием с воздействием по возмущению и регулированием с обратной связью. Контур регулирования с воздействием по возмущению пытается нейтрализовать возмущение прежде, чем оно изменит регулируемую переменную, в то время, как контур регулирования с обратной связью пытается отрабатывать возмущение после того, как оно воздействует на регулируемую переменную.
Система регулирования с воздействием по возмущению
Система регулирования с воздействием по возмущению имеет очевидное преимущество перед системой регулирования с обратной связью. При регулировании по возмущению в идеальном случае величина регулируемой переменной не изменяется, она остается на значении ее уставки. Но ручное регулирование по возмущению требует более сложного понимания того влияния, которое возмущение окажет на регулируемую переменную, а также использования более сложных и точных приборов.
На заводе редко можно встретить чистую систему регулирования по возмущению. Когда используется система регулирования по возмущению, она обычно сочетается с системой регулирования с обратной связью. И даже в этом случае регулирование по возмущению предназначается только для более ответственных операций, которые требуют очень точного регулирования.
Одноконтурные и многоконтурные системы регулирования
Одноконтурная система регулирования или простой контур регулирования — это система регулирования с одним контуром, который обычно содержит только один первичный чувствительный элемент и обеспечивает обработку только одного входного сигнала на регулятор.
Одноконтурная система регулирования
Многоконтурная система регулирования
Двухпозиционное регулирование регулирование, при котором регулирующий орган перемещается из одного крайнего положения в другое и обратно: включено или выключено
Дифференциальное регулирование выработка составляющей выходного сигнала регулятора в зависимости от скорости отклонения регулируемой переменной
Интегральное регулирование формирует регулирующее воздействие пропорционально интегралу отклонения регулируемой величины так долго, пока существует отклонение
Пропорциональное регулирование способ регулирования, при котором характеристики выходного сигнала пропорциональны характеристикам входного сигнала
Исполнительный механизм устройство, преобразующее выходной сигнал регулятора в перемещение регулирующего органа
25. система регулирования: Элементы и устройства для автоматического регулирования параметров газотурбинной установки.
Смотри также родственные термины:
2. Система регулирования микроклимата помещения
Комплекс систем кондиционирования воздуха, вентиляции, отопления и охлаждения для искусственного поддержания установленного микроклимата помещения
2.21 система регулирования сиденья (adjustment system of the seat): Устройство, при помощи которого сиденье или его части могут устанавливаться в положения, соответствующие пропорциям сидящего человека; в частности, это устройство может обеспечить возможность:
2.21.1 продольного перемещения;
2.21.2 вертикального перемещения;
2.21.3 углового перемещения.
36. Система регулирования сиденья катапультного кресла
Устройство катапультного кресла, предназначенное для установки его сиденья в положение в зависимости от роста летчика
Полезное
Смотреть что такое "система регулирования" в других словарях:
система регулирования ВД — система регулирования ветродвигателя Комплекс устройств, обеспечивающий регулирование в требуемых пределах частоты вращения и нагрузки ВД при изменении скорости ветра в рабочем диапазоне. [ГОСТ Р 51237 98] Тематики ветроэнергетика Синонимы… … Справочник технического переводчика
система регулирования — Элементы и устройства для автоматического регулирования параметров газотурбинной установки. Примечание К параметрам относятся частота вращения ротора, температура газов, давление, выходная мощность и другие параметры. [ГОСТ Р 51852 2001] Тематики … Справочник технического переводчика
СИСТЕМА РЕГУЛИРОВАНИЯ — СИСТЕМА РЕГУЛИРОВАНИЯ … Большая политехническая энциклопедия
система регулирования — reguliavimo sistema statusas T sritis automatika atitikmenys: angl. control system vok. Regelungssystem, n rus. система регулирования, f pranc. système de commande, m … Automatikos terminų žodynas
система регулирования — reguliavimo sistema statusas T sritis Standartizacija ir metrologija apibrėžtis Sistema, susidedanti iš reguliuojamojo objekto, reguliuojančiojo įtaiso ir juos jungiančių ryšio kanalų. atitikmenys: angl. control system vok. Regelsystem, n rus.… … Penkiakalbis aiškinamasis metrologijos terminų žodynas
система регулирования — reguliavimo sistema statusas T sritis fizika atitikmenys: angl. control system; regulating system vok. Regelsystem, n; Regelungssystem, n rus. система регулирования, f pranc. système de réglage, m; système de régulation, m … Fizikos terminų žodynas
система регулирования — Совокупность регулируемого объекта и регулятора (регуляторов), объединенных для осуществления автоматического регулирования … Политехнический терминологический толковый словарь
система регулирования сиденья — Устройство, при помощи которого сиденье или его части могут устанавливаться в положения, соответствующие пропорциям сидящего человека; в частности, это устройство может обеспечить возможность: 1) продольного перемещения; 2) вертикального… … Справочник технического переводчика
система регулирования байпаса пара — — [А.С.Гольдберг. Англо русский энергетический словарь. 2006 г.] Тематики энергетика в целом EN steam bypass control systemSBCS … Справочник технического переводчика
система регулирования байпаса при сбросе пара — — [А.С.Гольдберг. Англо русский энергетический словарь. 2006 г.] Тематики энергетика в целом EN steam dump bypass control systemSDBCS … Справочник технического переводчика
Системы автоматики: системы автоматического контроля, управления и регулирования

Все элементы автоматики по характеру и объему выполняемых операций подразделяют на системы: автоматического контроля, автоматического управления, автоматического регулирования.
Система автоматического контроля (рис. 1) предназначена для контроля за ходом какого-либо процесса. Такая система включает датчик В, усилитель А, принимающий сигнал от датчика и передающий его после усиления на специальный элемент Р, который реализует заключительную операцию автоматического контроля — представление контролируемой величины в форме, удобной для наблюдения или регистрации.
В частном случае в качестве исполнительного элемента Р могут служить сигнальные лампы или звуковые сигнализаторы. Систему с такими элементами называют системой сигнализации .

Рис. 1. Система автоматического контроля
В систему автоматического контроля кроме указанных на рис. 1, а могут входить и другие элементы - стабилизаторы, источники питания, распределители (при наличии нескольких точек контроля или нескольких датчиков в одном исполнительном элементе Р) и т. д.
Независимо от количества элементов системы автоматического контроля являются разомкнутыми и сигнал в них проходит только в одном направлении — от объекта контроля Е к исполнительному элементу Р.
Система автоматического управления предназначена для частичного или полного (без участия человека) управления объектом либо технологическим процессом. Эти системы широко применяют для автоматизации, например, процессов пуска, регулирования частоты вращения и реверсирования электродвигателей в электроприводах всех назначений.
Необходимо указать на такую важную разновидность систем автоматического управления, как системы автоматической защиты , которые не допускают аварийного или предельного режима, прерывая в критический момент контролируемый процесс.

Система автоматического регулирования поддерживает регулируемую величину в заданных пределах. Это наиболее сложные системы автоматики, объединяющие функции автоматического контроля и управления. Составная часть этих систем - регулятор .
Если системы выполняют только одну задачу — поддерживают постоянной регулируемую величину, их называют системами автоматической стабилизации. Однако существуют такие процессы, для которых необходимо изменять во времени регулируемую величину по определенному закону, обеспечивая ее стабильность на отдельных участках. В этом случае автоматическую систему называют системой программного регулирования .
Для обеспечения постоянства регулируемой величины можно использовать один из принципов регулирования - по отклонению, возмущению или комбинированный, которые будут рассмотрены применительно к системам регулирования напряжения генераторов постоянного тока.
При регулировании по отклонению (рис. 2 и 3) элемент сравнения UN сравнивает фактическое напряжение U ф с заданным Uз, определяемым задающим элементом EN. После сравнения на выходе элемента UN появляется сигнал Δ U=Uз - U ф, пропорциональный отклонению напряжения от заданного. Этот сигнал усиливается усилителем А и поступает на рабочий орган L. Изменение напряжения на рабочем органе L, которым является обмотка возбуждения генератора G, приводит к изменению фактического напряжения генератора, устраняющего его отклонение от заданного.
Усилитель А, не изменяющий принципа действия системы, необходим для ее практической реализации, когда мощность сигнала, поступающего от элемента сравнения UN, недостаточна для воздействия на рабочий орган L.
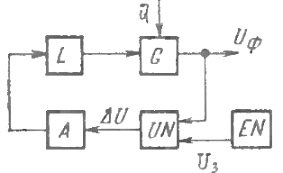
Рис. 2. Система автоматического регулирования
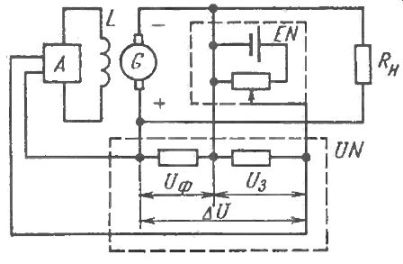
Рис. 3. Автоматическое регулирование по отклонению
Наряду с задающим воздействием на систему могут влиять различные дестабилизирующие факторы Q, которые вызывают отклонение регулируемой величины от заданной. Воздействия дестабилизирующих факторов, один из которых условно обозначен на рисунке буквой Q, могут проявляться в различных местах системы и, как принято говорить, поступать по различным каналам. Так, например, изменение температуры окружающей среды приводит к изменению сопротивления в цепи обмотки возбуждения, что в свою очередь влияет на напряжение генератора.
Однако где бы ни возникали воздействия Q (со стороны потребителя — ток нагрузки, вследствие изменения параметров цепи возбуждения), система регулирования будет реагировать на вызванное ими отклонение регулируемой величины от заданной.
Наряду с рассмотренным принципом регулирования используют регулирование по возмущению , при котором в системе предусматривают специальные элементы, измеряющие воздействия Q и влияющие на рабочий орган.
В системе, использующей только такой принцип регулирования (рис. 4 и 5), фактическое значение регулируемой величины не учитывается. Принимают во внимание только одно возмущающее воздействие — ток нагрузки I н. В соответствии с изменением тока нагрузки происходит изменение магнитодвижущей силы (мдс) обмотки возбуждения L2, являющейся измерительным элементом данной системы. Изменение мдс этой обмотки приводит к соответствующему изменению напряжения на выводах генератора.
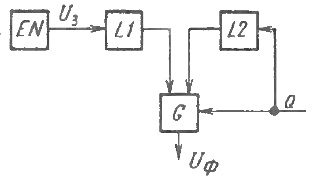
Рис. 4. Автоматическое регулирование по возмущению
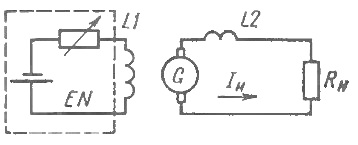
Рис. 5. Принципиальная схема системы автоматики
Система, осуществляющая комбинированное регулирование (по отклонению и возмущению), может быть получена объединением ранее рассмотренных систем в одну (рис. 6)
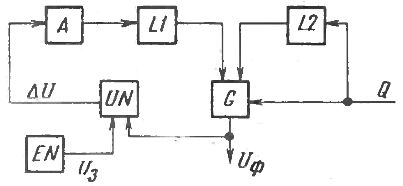
Рис. 6. Система автоматики комбинированного регулирования
В системе автоматического регулирования задающий элемент представлял собой эталон напряжения, с которым сравнивалась регулируемая величина U ф. Значение U p принято называть уставкой регулятора. В общем случае регулируемую величину обозначают буквой Y , а ее уставку Yo .
Если уставку Yo в заданных пределах оператор изменяет вручную, а регулируемой величиной является Y , система работает в режиме стабилизации. Если уставка регулятора изменяется произвольно во времени, система автоматики, поддерживая значение Δ Y = Yo - Y = 0, будет работать в следящем режиме, т. е. следить за изменением Yo .
И наконец, если уставку Yo изменять не произвольно, а по заранее известному закону (программе), система будет работать в режиме программного управления. Такие системы называют системами программного регулирования .
не имеет замкнутой цепи воздействия по регулируемой величине, поэтому ее называют разомкнутой.
Системы автоматики по принципу действия подразделяют на статические и астатические. В статических системах регулируемая величина не имеет строго постоянного значения и с увеличением нагрузки изменяется на некоторую величину, называемую ошибкой регулирования.
Рассмотренные системы (рис. 1 - 6) являются примерами простейших статических систем. Наличие ошибки регулирования в них обусловлено тем, что для обеспечения большего тока возбуждения необходимо большее отклонение напряжения.
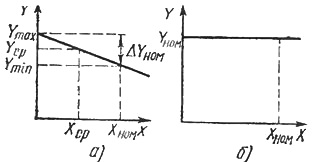
Рис. 7. Внешние характеристики систем автоматики: а - статической, б - астатисческой
Зависимость напряжения генератора от тока нагрузки в виде прямой наклонной линии показана на рис. 7, а. Наибольшее относительное отклонение напряжения от заданного называют статизмом системы по напряжению: Δ = = (Um a x - Umin)/Um a x, где (Um a x, Umin - напряжения генератора на холостом ходу и под нагрузкой. Обобщая сделанное заключение для любой статической системы, можно записать: Δ = ( Y m a x - Y min)/ Y m a x, где Y — регулируемая величина.
Иногда статизм определяют по другой формуле: Δ = ( Y m a x - Y min)/ Y ср, причем Y ср = 0,5( Y m a x + Y min) - среднерегулируемая величина Y . Статизм называют положительным, если с ростом нагрузки значение Y уменьшается, и отрицательным, если значение Y увеличивается.
В астатических системах статизм равен нулю и поэтому зависимость регулируемой величины от нагрузки представляет собой линию, параллельную оси нагрузки (рис. 7,6).
Рассмотрим, например, астатическую систему автоматики (см. рис. 8), в которой напряжение генератора регулируется изменением сопротивления реостата R , включенного в цепь обмотки возбуждения L.
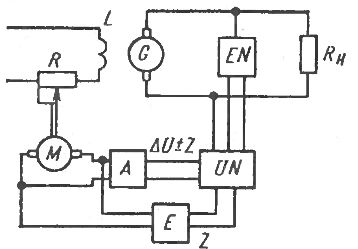
Рис. 8. Астатическая система автоматики
Серводвигатель М начинает вращаться и перемещать ползунок реостата R всякий раз, когда на входе усилителя А появляется сигнал Δ16; U об отклонении напряжения генератора U ср от заданного значения U p . Ползунок реостата перемещается до тех пор, пока сигнал об отклонении не станет равным нулю. Такая система отличается от другой системы тем, что для поддержания нового значения тока возбуждения не требуется сигнала на выходе усилителя А. Это отличие и позволяет избавиться от статизма.
Во всех ранее приведенных примерах предполагалось, что воздействие на рабочий орган производилось непрерывно в течение всего промежутка времени, пока существует отклонение регулируемой величины от заданной. Такое управление называется непрерывным , а системы — системами непрерывного действия .
Однако существуют системы, называемые дискретными, в которых воздействие на рабочий орган осуществляется с перерывами, например система регулирования температуры подошвы утюга, в которой регулирующее воздействие может принимать только одно из двух фиксированных значений при непрерывном изменении регулируемой величины — температуры.
В этой системе регулирование температуры осуществляется включением и отключением нагревательного элемента R по сигналу датчика температуры (смотрите - Базовые элементы автоматики). При увеличении температуры сверх уставки датчик размыкает свой контакт и отключает нагревательный элемент. При снижении температуры ниже уставки нагревательные элементы включаются. Эта система не имеет устойчивого промежуточного состояния рабочего органа, а он занимает лишь два положения — включено в сторону "больше" или включено в сторону "меньше".

Для обеспечения необходимого качества процесса регулирования в системе могут быть предусмотрены специальные устройства, называемые обратными связями . Эти устройства отличаются от других тем, что сигнал в них имеет направление, обратное основному управляющему сигналу.
Для примера на рис. 8 изображена обратная связь Е по отклонению регулируемой величины Δ U , соединяющая выход усилителя А со входом элемента сравнения UN. При положительной обратной связи Е на выходе элемента сравнения UN получается сумма величин Δ U и Z, а при отрицательной — их разность.
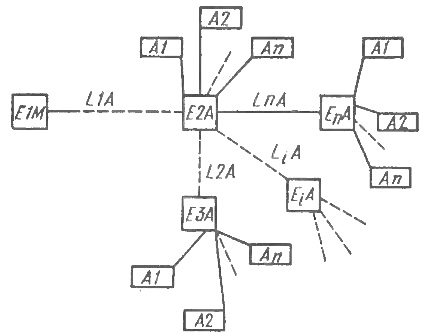
Рис. 9. Структурная схема системы телемеханики
Рассмотренные системы автоматики предполагают непосредственную связь всех входящих в них элементов. Если элементы системы автоматики расположены на значительном удалении друг от друга, для их соединения используют передатчики, каналы связи и приемники. Такие системы называют телемеханическими .
Телемеханическая система состоит из пункта управления, где находится оператор, управляющий работой системы, одного или нескольких контролируемых пунктов, на которых расположены объекты контроля A 1 - An, линий связи L1A - LnA (каналы передачи данных), соединяющих пункт управления Е1М с контролируемыми пунктами Е2А - Еn (рис. 9). В телемеханической системе по линиям связи можно передавать как все, так и некоторые виды контрольной и управляющей информации.
При передаче информации только о параметрах ОК телемеханическую систему называют с истемой телеизмерения , в которой сигналы с выходов датчиков (измерительных преобразователей, установленных на ОК) передаются на пункт управления Е1М и воспроизводятся в виде показаний стрелочных или цифровых измерительных приборов. Информация может передаваться как непрерывно, так и периодически, в том числе и по команде оператора.
Если на пункт управления передается только информация о состоянии, в котором находится тот или иной объект контроля ("включен", "выключен", "исправен", "неисправен"), такую систему называют системой телесигнализации .
Телесигнализация, как и телеизмерение, выдает оператору исходные данные для принятия решения по управлению ОК или служит для выработки управляющих воздействий в системах телеуправления и телерегулировки. Основное отличие этих систем от предыдущих заключается в том, что в первой из них используются дискретные сигналы типа "включить", "выключить", а во второй — непрерывные, подобно обычным системам регулирования.
Автоматическое регулирование и управление
В современном мире очень трудно найти технологический процесс, который не был бы автоматизирован. Автоматизация любого технологического процесса подразумевает его контроль, управление, регулирование, сигнализацию, защиту и блокировку. В этой статье рассмотрим основы автоматического управления и регулирования.
В окружающем нас мире повсюду протекают различные процессы управления. В управлении нуждается всё: физический или химический процесс, отдельная технологическая установка, производство в целом, промышленность и так далее. Даже общественные отношения. Управление на сегодняшний день является самым сложным видом человеческой деятельности.
Нет такой отрасли промышленности, где бы не применялись системы автоматического регулирования и управления. Эти системы разнообразны и по характеру решаемых ими задач и по исполнению.

Автоматическое регулирование
Регулирование – это поддержание постоянным значения некоторой заданной величины, характеризующей процесс, или изменение его по заданному закону, осуществляемое с помощью изменения состояния объекта или действующих на него возмущений и воздействия на регулирующий орган объекта.
Системы автоматического регулирования (САР) предназначаются для автоматического поддержания заданного режима технологического процесса или изменения его во времени по заранее заданному или задаваемому в зависимости от каких-то условий закону. При этом имеется в виду, что внешние условия нарушают заданный закон протекания процесса, а система автоматического регулирования стремится его выполнить, преодолевая влияние внешних факторов.
Под объектом регулирования понимают аппарат (станок, машину), в котором один или несколько физических параметров должны изменяться по заданным законам при любых возможных внешних условиях. Объектом регулирования могут быть:
нагревательная печь, в которой температура должна оставаться постоянной или изменяться по заданному закону;
бак, в котором должен поддерживаться заданный уровень жидкости при изменениях ее расхода из бака;
электрический двигатель, скорость которого должна оставаться постоянной при изменениях момента сопротивления.
Физические величины, закон изменения которых осуществляется автоматическим устройством, называются регулируемыми величинами. Устройство, автоматически поддерживающее заданный закон изменения регулируемой величины, называется автоматическим регулятором.
Заданный закон изменения регулируемой величины вырабатывается специальным задающим устройством (задатчиком). Воздействие задатчика на регулятор называется задающим воздействием.
Автоматический регулятор постоянно сравнивает текущее значение регулируемой величины с заданным (уставкой) и при наличии рассогласования вырабатывает регулирующее воздействие. Если регулируемая величина отклоняется от заданного значения, управляющий орган воздействует на исполнительный механизм так, чтобы рассогласование между заданным и действительным протеканием процесса было ликвидировано. Человек в эту систему непосредственно вмешаться не может, возможно только косвенное участие – посредством изменения уставки.

Нарушение заданного закона протекания технологического процесса происходит в основном из-за внешних воздействий на объект, которые называют возмущающими воздействиями. К ним относятся изменения момента сопротивления на валу двигателя, расхода воды из бака, качества топлива или массы нагреваемых изделий в печи и т. д.
Чаще всего устройства автоматического регулирования — системы замкнутые (управление по отклонению). Сигнал, появившись в любой точке замкнутого контура, проходит все звенья системы и возвращается в место своего возникновения (в преобразованном виде). Но бывают и разомкнутые системы (управление по возмущению).
В результате этого в системах регулирования могут возникать колебания, в том числе колебания регулируемой величины. Если колебания возрастают, система называется неустойчивой и является неработоспособной. Поэтому первое требование к системам автоматического регулирования — обеспечение устойчивости регулирования, т. е. обеспечение затухания колебаний, возникающих в системе.
Необходимо также, чтобы выведенная из состояния равновесия возмущающими воздействиями система регулирования вернулась к заданному положению равновесия возможно точнее и возможно быстрее. Пути построения систем, отвечающих перечисленным требованиям, определяет теория автоматического регулирования.

Системы автоматического регулирования делятся по характеру задающего воздействия. Когда регулируемая величина должна быть постоянна, то систему называют системой автоматической стабилизации (или просто системой регулирования). Сюда относятся системы сохранения уровня воды в баке, скорости вращения двигателя и др.
Если регулируемая величина изменяется и заранее известен закон (программа) изменения задающего воздействия, система называется системой программного регулирования. Она может, например, осуществлять автоматическое изменение температуры в печи по заранее заданной программе.
Если регулируемая величина изменяется, но заранее не известен закон изменения задающего воздействия, систему регулирования называют следящей системой. К следящим системам в известном смысле можно отнести автоматические потенциометры и мосты.
В автоматическом потенциометре реверсивный двигатель через ползунок реохорда воздействует на измерительный мост так, чтобы напряжение на выходе позднего изменялось соответственно всем изменениям термо-э. д. с. Очевидно, что термо-э. д. с. изменяется по закону, неизвестному заранее, иначе не нужен был бы сам измерительный прибор.
Характер воздействия регулирующего органа на объект бывает непрерывным и прерывистым. Последнее происходит, когда в системе регулирования применяются реле или специальные импульсные устройства.
Простейшими регуляторами прерывистого действия являются двухпозиционные регуляторы. Такое название они получили потому, что их регулирующий орган может занимать только два положения (позиции). Очень часто эти позиции соответствуют максимальной и минимальной подаче сырья или энергии в объект.
Для регулирования непрерывных процессов наиболее часто используют физические или программные ПИД-регуляторы.
Автоматическое управление
Управление – это процесс выработки управляющих воздействий по переводу объекта управления в желаемое состояние.
Более полное определение: это осуществление совокупности воздействий, выбранных из множества возможных на основании определенной информации и направленных на поддержание или улучшение функционирования управляемого объекта в соответствии с целью управления. Эти последние слова в данной ситуации являются ключевыми.
Система автоматического управления отличается от системы автоматического регулирования тем, что при одних и тех же значениях входных величин, т.е. при одной и той же исходной информации воздействие, которое вырабатывает система может быть различно в зависимости от того, какая цель или какой критерий управления в нее заложен.

Назначение систем автоматического управления (САУ) — исключить участие человека в управлении технологическим процессом. Функции человека сводятся к осуществлению пускового импульса. Все остальные операции по управлению процессом, по изменению режимов работы производятся автоматическим устройством.
Устройства автоматического управления воздействуют на исполнительные механизмы, приводы рабочих агрегатов, которые изменяют подачу сырья, энергии в аппараты, производят перемещения обрабатываемых изделий и т. д.
При автоматическом управлении автоматическое устройство обеспечивает необходимую последовательность, начало и окончание отдельных операций, составляющих рабочий процесс. Подача командного импульса на управляющий орган осуществляется человеком. Управляющий орган воздействует на исполнительный механизм, который подает сырье или энергию в аппарат или производит определенную серию механических перемещений, операций, поддерживая тем самым заданный режим работы установки.

Автоматизированная система управления (АСУ) – совокупность математических методов, технических и программных средств, организационных комплексов, а также управленческого и обслуживающего персонала, которые совместно осуществляют рациональное управление объектом управления в соответствии с поставленной целью.
Эта система обычно содержит большое количество датчиков, позволяющих измерять различные параметры, большое количество исполнительных устройств, причем их количество необязательно должно совпадать с количеством датчиков.
Основным элементом этой системы является управляющее устройство (контроллер), в который заложена программа обработки, информации получаемой с датчиков и критерий управления, исходя из которого система управления и вырабатывает различные управляющие воздействия. При одном и том же значении контролируемых параметров управляющее воздействие в данном случае может быть различным.
Системы автоматического регулирования наиболее старые системы автоматизации. Они начали использоваться с середины XIX века (использование автоматических регуляторов в паровых машинах, в железнодорожной автоматике, в электроэнергетике). В 30-е - 60-е годы XX все системы автоматизации (автоматические станки, линии, участки) строились с использованием релейных схем в комбинации с локальными аналоговыми регуляторами с использованием электронных элементов.
В то время электрические реле являлись наиболее распространенными элементами электроавтоматики. Они применялсь во всех схемах автоматического контроля, защиты, управления и регулирования.
Основная особенность реле — возможность управления достаточно большими мощностями в исполнительных механизмах с помощью незначительных управляющих сигналов от датчиков. Коэффициент усиления реле по мощности может достигать значений десятков тысяч.

По мере того, как технологические процессы усложнялись, количество регуляторов на объектах автоматизации росло и системы становились очень громоздкими и тяжелыми в обслуживании, поэтому после появления компьютерных систем управления (микроконтроллеры, микропроцессоры, программируемые логические контроллеры) системы автоматического регулирования стали замещаться системами автоматического управления.
Обучение построению автоматических систем регулирования и управления
Курс по программированию контроллеров:
Дополнение Михаила Алексеева (FB)
Традиционно в старой литературе считалось, что система автоматического управления (САУ) и система автоматического регулирования (САР) -- это синонимы. Но в книге Dafoss "Преобразователи частоты - просто о сложном" объясняется, что “регулирование” и “управление” это разные вещи. Логика таков: если контур замкнут обратной связью — это САУ, если разомкнут, то — САР.
В сети можно встретиться с таким определением: Автоматическое регулирование – поддерживание на постоянном уровне или изменение по заданному закону отдельных регулируемых параметров (температура, давление, расход и т.д.) в объекте управления. Система автоматического регулирования (САР) является подсистемой систем автоматического управления.
Читайте также: