
Принцип работы радиолокатора кратко
Обновлено: 28.06.2024
Радиолокация с момента своего возникновения, в первую очередь, была нацелена на решение военных задач, но сегодня без ее помощи человек не может обходиться и в своей повседневной жизни – это мобильная связь, авиаперелеты, медицинская диагностика и многое другое. Данное издание может заинтересовать даже тех, кто совсем далек от радиотехники. Пролистаем книгу вместе и расскажем вкратце об основных понятиях, физических основах радиолокации и структуре РЛС.
Первые эксперименты: радиоволны в открытом море
С помощью радиолокации обеспечивается решение широкого круга задач, связанных с обнаружением воздушных и наземных объектов (целей), навигацией (обеспечением вождения) различных судов (воздушных и морских), с управлением воздушным и морским движением, управлением средствами ПВО, с обеспечением безопасности движения транспортных средств, с предсказанием возникновения погодных явлений, а также с поражением наземных (морских) и воздушных объектов в любое время суток и в любых метеоусловиях. Помимо этого, основываясь на принципах радиолокации, решаются задачи, связанные с диагностикой организма человека. Как видите, спектр задач, решаемых радиолокацией, достаточно широк несмотря на то, что радиолокация сравнительно молодое научное направление.
![Самолет_дальнего_радиолокационного_обнаружения_и_управления_А_50У.jpg]()
Самолет дальнего радиолокационного обнаружения и управления А-50У

Как и любое направление развития науки и техники, радиолокация базируется на некоторых физических основах, позволяющих обеспечивать решение стоящих перед ней задач, а именно: обнаруживать различного рода объекты и определять координаты и параметры их движения с помощью радиоволн.
Использование радиоволн, или, другими словами, электромагнитных колебаний (ЭМК), частотный диапазон которых сосредоточен в пределах от 3 кГц до 300 ГГц, определяет основные преимущества радиолокационных систем (РЛС) перед другими системами локации (оптическими, инфракрасными, ультразвуковыми). В первую очередь, это обусловлено тем, что закономерности распространения радиоволн в однородной среде достаточно стабильны как в любое время суток, так и в любое время года и, следовательно, изменение условий оптической видимости, обусловленных появлением дождя, снега, тумана или изменением времени суток, не нарушает работоспособность РЛС.
Основными закономерностями распространения радиоволн, которые позволяют обнаруживать объекты и измерять координаты и параметры их движения, являются следующие:
– постоянство скорости и прямолинейность распространения радиоволн в однородной среде (при проведении инженерных расчетов скорость распространения радиоволн принимают равной 3·10 –8 м/с;
– способность радиоволн отражаться от различных областей пространства, электрические или магнитные параметры которых отличаются от аналогичных параметров среды распространения;
– изменение частоты принимаемого сигнала по отношению к частоте излученного сигнала при относительном движении источника излучения и приемника радиолокационного сигнала.
Последнее свойство радиоволн в радиолокации называют эффектом Доплера по имени австрийского ученого Кристиана Андреаса Доплера, который в 1842 году теоретически обосновал зависимость частоты колебаний, воспринимаемых наблюдателем, от скорости и направления движения источника волны и наблюдателя относительно друг друга.
![радиолокатор АОРЛ-1АС_1.jpg]()
Доплеровский метеорологический радиолокатор

Для проведения процедуры измерения расстояния до цели РЛС излучает в ее направлении зондирующий сигнал. Данный сигнал доходит до объекта, отражается от него и возвращается обратно к РЛС. Поскольку, как отмечалось ранее, скорость распространения радиосигнала в однородной среде постоянная, то для определения дальности до объекта необходимо зафиксировать момент излучения зондирующего сигнала t0 и момент приема отраженного сигнала от цели t1. В результате разность (t1 – t0) позволяет определить время, в течение которого радиоволна проходит путь от РЛС к цели и обратно, которое равно 2Д, где Д – дальность до объекта (расстояние между РЛС и целью). Разность времен (t1 – t0) в радиолокации называют временем запаздывания и обозначают как tд. В результате при известной величине tд можно составить равенство 2Д = Сtд, из которого следует, что дальность до объекта (цели) равна Д = Сtд/2.
Таким образом, подводя итог процедуре измерения дальности до цели, можно констатировать, что для измерения с помощью РЛС расстояния до цели необходимо определить время запаздывания tд, которое при известной скорости распространения радиоволн позволяет определить дальность до нее.
Большой процент объектов радиолокационного наблюдения составляют подвижные или движущиеся цели. К таким целям, например, относятся самолеты, вертолеты, автомобили, люди и т.д. Основным отличительным признаком таких объектов является скорость их движения. Выявить эффект движения цели, как отмечалось ранее, можно, опираясь на эффект Доплера, который позволяет определить радиальную скорость движения цели. То есть частота принимаемых РЛС колебаний от цели, двигающейся ей навстречу, возрастает по сравнению со случаем неподвижной цели и уменьшается при удалении цели от РЛС. Данное изменение частоты принимаемого сигнала называют доплеровским смещением частоты. Величина данного смещения зависит от скорости взаимного движения носителя РЛС и цели. Необходимо заметить, что рассмотренные свойства радиоволн будут проявляться вне зависимости от условий оптической видимости в зоне радиолокационного наблюдения.
Основные классы РЛС
Выполнение частной задачи радиолокационного наблюдения, например обнаружения цели или измерения дальности до нее, осуществляется с помощью одноименных радиолокационных устройств – радиолокационного обнаружителя или радиолокационного измерителя дальности соответственно. Совокупность радиолокационных устройств, предназначенных для решения какой-либо общей задачи, например обеспечения перехвата воздушной цели либо поражения наземной цели и т. п., называется радиолокационной системой (РЛС), или радиолокатором. Техническая реализация такой системы обычно именуется радиолокационной станцией, а в англоязычной литературе – радаром.
Источником информации о цели в радиолокации служит радиолокационный сигнал. В зависимости от способов формирования радиолокационного сигнала различают следующие типы РЛС, или методы радиолокации.
1. Активные РЛС, или активный метод радиолокационного наблюдения. При данном методе с помощью РЛС формируется радиосигнал, который излучается в направлении на цель (зондирующий сигнал). В результате взаимодействия зондирующего сигнала с целью образуется отраженный сигнал, который поступает на вход приемника РЛС и затем обрабатывается в данном устройстве в целях извлечения информации о наблюдаемой цели. Данный метод радиолокационного наблюдения получил наибольшее распространение в современных РЛС. Необходимо заметить, что при использовании активного метода устройство формирования радиосигнала (передатчик) и приемник РЛС находятся в одной точке пространства.
2. Активные РЛС с активным ответом. Как и в предыдущем случае, с помощью РЛС формируется радиосигнал, который излучается в направлении на цель (зондирующий сигнал). Однако радиолокационный сигнал формируется не в результате отражения излучаемых электромагнитных колебаний целью, а за счет переизлучения их с помощью специального устройства, именуемого ответчиком-ретранслятором. Данный метод широко используется в системах определения государственной принадлежности наблюдаемых объектов, управления воздушным движением, а также в радионавигационных системах.
4. Пассивная радиолокация, или пассивный метод радиолокационного наблюдения, основан на приеме собственного радиоизлучения целей. Отличительной особенностью таких систем является наличие в их составе только приемного устройства. Отсутствие необходимости формирования зондирующего колебания делает такие системы высокопомехозащищенными. Данные РЛС широко применяются при пеленгации радиоизлучающих систем противника, например РЛС, входящих в систему управления ПВО противоборствующей стороны.
Таким образом, радиолокационные системы могут быть активными, полуактивными, активными с активным ответом и пассивными. Кроме того, все существующие РЛС можно разделить на следующие основные группы.
В то же время необходимо отметить, что, несмотря на проведенное выше разделение РЛС на классы, существуют специальные РЛС, которые строятся под решение специфических задач и под данное разделение на классы не подпадают. Например, РЛС, решающие задачи диагностики состояния организма человека либо наблюдения объектов, скрытых за преградами, либо наблюдения космических объектов и т.п. Но в целом приведенная классификация позволяет разделить все существующие РЛС по функциональному предназначению.
Состав элементов радиолокационной системы, конечно же, зависит от назначения системы и задач, решение которых возлагается на нее. Тем не менее можно рассмотреть некоторую обобщенную структуру РЛС и рассказать о предназначении элементов такого радиолокатора.
Представим структурную схему гипотетической РЛС, в основу работы которой положен активный метод радиолокации при импульсном режиме излучения, то есть с использованием импульсных зондирующих сигналов в виде чередующихся во времени отрезков колебаний.
На данной структурной схеме можно представить шесть основных элементов типовой РЛС, которые будут иметь место вне зависимости от принципов ее построения, – передатчик (ПРД), приемник (ПРМ), антенная система (АНТ), антенный переключатель (АП), система управления и синхронизации, система обработки.
Передатчик, или передающий тракт РЛС, обеспечивает формирование зондирующего радиосигнала, усиление его до требуемого уровня мощности и передачу в антенную систему. Антенна в импульсном радиолокаторе работает как на передачу, так и на прием. Переключение антенны из режима излучения в режим приема обеспечивается с помощью антенного переключателя, который управляется сигналами системы управления и синхронизации.
Приемник РЛС обеспечивает предварительное преобразование принятого сигнала. Во-первых, осуществляет доведение уровня принятого сигнала до необходимого значения для успешной работы последующих узлов радиолокатора. Во-вторых, осуществляет преобразование (чаще уменьшение) несущей частоты принимаемого сигнала для снижения требований к элементам системы обработки. В-третьих, обеспечивает предварительную селекцию полезного сигнала (сигнала, отраженного от цели) из сигналов помех, которые действуют одновременно с полезным сигналом.
После предварительного преобразования в приемнике сигнал поступает в систему обработки, в которой решаются задачи по выделению из принятого сигнала информации о цели. Система обработки в современных РЛС представляет собой цифровую вычислительную систему, подобную обычному компьютеру или совокупности компьютеров. Поэтому данный элемент РЛС часто еще называют цифровой системой обработки.
![]()
Радиолокационная станция (РЛС) или рада́р (англ. radar от Radio Detection and Ranging — радиообнаружение и дальнометрия) — система для обнаружения воздушных, морских и наземных объектов, а также для определения их дальности и геометрических параметров. Использует метод, основанный на излучении радиоволн и регистрации их отражений от объектов. Английский термин-акроним появился в 1941 г., впоследствии в его написании прописные буквы были заменены строчными.
Содержание
История
В 1887 году немецкий физик Генрих Герц начал эксперименты, в ходе которых он открыл существование электромагнитных волн, предсказанных теорией Джеймса Максвелла. Герц научился генерировать и улавливать электромагнитные радиоволны и обнаружил, что они по-разному поглощаются и отражаются различными материалами.
Одно из первых устройств, предназначенных для радиолокации воздушных объектов продемонстрировал 26 февраля 1935 г. шотландский физик Роберт Ватсон-Ватт, который примерно за год до этого получил первый патент на изобретение подобной системы.
Россия
В Советском Союзе осознание необходимости средств обнаружения авиации, свободных от недостатков звукового и оптического наблюдения, привела к разворачиванию исследований в области радиолокации. Идея, предложенная молодым артиллеристом Павлом Ощепковым получила одобрение высшего командования: наркома обороны СССР К. Е. Ворошилова и его заместителя - М. Н. Тухачевского.
Классификация радаров

По предназначению радиолокационные станции можно классифицировать следующим образом:
- РЛС обнаружения;
- РЛС управления и слежения;
- Панорамные РЛС;
- РЛС бокового обзора;
- Метеорологические РЛС.
По сфере применения различают военные и гражданские РЛС.
По характеру носителя:
- Наземные РЛС
- Морские РЛС
- Бортовые РЛС
По типу действия
- Первичные или пассивные
- Вторичные или активные
- Совмещённые
По диапазону волн:
- Метровые
- Сантиметровые
- Миллиметровые
Устройство и принцип действия Первичного радиолокатора
Первичный (пассивный) радиолокатор, в основном, служит для обнаружения целей, освещая их электромагнитной волной и затем принимая отражения (эхо) этой волны от цели. Поскольку скорость электромагнитных волн постоянна (скорость света), становится возможным определить расстояние до цели, основываясь на измерении времени распространения сигнала.
В основе устройства радиолокационной станции лежат три компонента: передатчик, антенна и приёмник.
Передающее устройство является источником электромагнитного сигнала высокой мощности. Он может представлять из себя мощный импульсный генератор. Для импульсных РЛС сантиметрового диапазона — обычно магнетрон или импульсный генератор работающий по схеме: задающий генератор — мощный усилитель, использующий в качестве генератора чаще всего лампу бегущей волны, а для РЛС метрового диапазона, часто используют — триодную лампу. В зависимости от конструкции, передатчик работает либо в импульсном режиме, формируя повторяющиеся короткие мощные электромагнитные импульсы, либо излучает непрерывный электромагнитный сигнал.
Антенна выполняет фокусировку сигнала приёмника и формирование диаграммы направленности, а также приём отражённого от цели сигнала и передачу этого сигнала в приёмник. В зависимости от реализации приём отражённого сигнала может осуществляться либо той же самой антенной, либо другой, которая иногда может располагаться на значительном расстоянии от передающего устройства. В случае, если передача и приём совмещены в одной антенне, эти два действия выполняются поочерёдно, а чтобы мощный сигнал, просачивающийся от передающего передатчика в приёмник не ослепил приёмник слабого эха, перед приёмником размещают специальное устройство, закрывающее вход приёмника в момент излучения зондирующего сигнала.
Приёмное устройство выполняет усиление и обработку принятого сигнала. В самом простом случае результирующий сигнал подаётся на лучевую трубку (экран), которая показывает изображение, синхронизированное с движением антенны.
Когерентные РЛС
Импульсные РЛС
Современные радары сопровождения построены как импульсные радары. Импульсный радар передаёт только в течение очень краткого времени, короткий импульс обычно приблизительно микросекунда в продолжительности, после чего он слушает эхо, в то время как импульс распространяется.
Поскольку импульс уходит далеко от радара с постоянной скоростью, время прошедшее с момента, когда импульс посылали, ко времени когда эхо получено, — ясная мера прямого расстояния до цели. Следующий импульс можно послать только через некоторое время, а именно после того как импульс придёт обратно, это зависит от дальности обнаружения радара (данным мощностью передатчика, усилением антенны и чувствительностью приёмника). Если бы импульс посылали раньше, то эхо предыдущего импульса от отдалённой цели могло бы быть перепутано с эхом второго импульса от близкой цели.
Промежуток времени между импульсами называют интервалом повторения импульса, обратная к нему величина — важный параметр, который называют частотой повторения импульса (ЧПИ) . Радары низкой частоты дальнего обзора, обычно имеют интервал повторения в несколько сотен импульсов в секунду (или Герц [Гц]). Частота повторения импульсов является одним из отличительных признаков, по которым возможно дистанционное определение модели РЛС.
Устранение пассивных помех
Одной из основных проблем импульсных РЛС является избавление от сигнала, отражающегося от неподвижных объектов: земной поверхности, высоких холмов и т. п. Если к примеру, самолёт находится на фоне высокого холма, отражённый сигнал от этого холма полностью перекроет сигнал от самолёта. Для наземных РЛС эта проблема проявляется при работе с низколетящими объектами. Для бортовых импульсных РЛС она выражается в том, что отражение от земной поверхности затеняет все объекты, лежащие ниже самолёта с радиолокатором.
Методы устранения помех используют, так или иначе, эффект Доплера (частота волны, отражённой от приближающегося объекта, увеличивается, от уходящего объекта — уменьшается).
Самый простой радар, который может обнаружить цель в помехах — радар с селекцией движущихся целей (СДЦ) — импульсный радар, который сравнивает отражения более чем от двух или больше интервалов повторения импульса. Любая цель, которая, движется относительно радара, производит изменение в параметре сигнала (стадия в последовательном СДЦ), тогда как помехи остаются неизменными. Устранение помех происходит путём вычитания отражений из двух последовательных интервалов. На практике устранение помех может быть осуществлено в специальных устройствах — черезпериодных компенсаторах или алгоритмами в программном обеспечении.
СДЦ, работающие с постоянной частотой повторения импульсов, имеют фундаментальную слабость: они являются слепыми к целям со специфическими круговыми скоростями (которые производят изменения фаз точно в 360 градусов), и такие цели не отображаются. Скорость, при которой цель исчезает для радиолокатора, зависит от рабочей частоты станции и от частоты повторения импульсов. Современные СДЦ излучают несколько импульсов с различной частоты повторения — такой, что невидимые скорости в каждой частоте повторения импульсов охвачены другими ЧПИ.
Другой способ избавления от помех реализован в импульсно-доплеровских РЛС, которые используют существенно более сложную обработку чем РЛС с СДЦ.
Важное свойство импульсно-доплеровских РЛС — это когерентность сигнала. Это значит, что посланные сигналы и отражения должны иметь определённую фазовую зависимость.
Импульсно-доплеровские РЛС обычно считаются лучше РЛС с СДЦ при обнаружении низколетящих целей во множественных помехах земли, это — предпочтительная техника, используемая в современном истребителе, для воздушного перехвата/управления огнём, примеры тому AN/APG-63, 65, 66, 67 и 70 радары. В современном доплеровском радаре большинство обработки выполняется отдельным процессором в цифровом виде с помощью цифровых сигнальных процессоров, обычно используя высокопроизводительный алгоритм Быстрое преобразование Фурье для преобразования цифровых данных образцов отражений кое во что более управляемое другими алгоритмами. Цифровые обработчики сигналов очень гибки и используемые алгоритмы могут обычно быстро заменяться другими, заменяя только память (ПЗУ) чипы, таким образом быстро противодействуя техники глушения противника если необходимо.
Устройство и принцип действия Вторичного радиолокатора
Принцип действия вторичного радиолокатора несколько отличается, от принципа Первичной радиолокации. В основе устройства Вторичной радиолокационной станции лежат компоненты: передатчик, антенна, генераторы азимутальных меток, приёмник, сигнальный процессор, индикатор и самолётный ответчик с антенной.
Передатчик. Служит для излучения импульсов запроса в антенну на частоте 1030 МГц
Антенна. Служит для излучения и приёма отражённого сигнала. По стандартам ICAO для вторичной радиолокации, антенна излучает на частоте 1030МГц, и принимает на частоте 1090 МГц.
Генераторы Азимутальных меток. Служат для генерации Азимутальных меток (Azimuth Change Pulse или ACP) и генерации Метки Севера (Azimuth Reference Pulse или ARP). За один оборот антенны РЛС генерируется 4096 малых азимутальных меток(для старых систем), или 16384 Малых азимутальных меток (для новых систем), их ещё называет улучшенные малые азимутальные метки (Improved Azimuth Change pulse или IACP), а также одну метку Севера. Метка севера приходит с генератора азимутальных меток, при таком положении антенны, когда она направлена на Север, а малые азимутальные метки служат для отсчёта угла разворота антенны.
Приёмник. Служит для приёма импульсов на частоте 1090 МГц
Сигнальный процессор. Служит для обработки принятых сигналов
Индикатор Служит для индикации обработанной информации
Самолётный ответчик с антенной Служит для передачи импульсного радиосигнала, содержащего дополнительную информацию, обратно в сторону РЛС при получении радиосигнала запроса.
Принцип Действия Принцип действия вторичного радиолокатора заключается в использовании энергии самолётного ответчика, для определения положения Воздушного судна. РЛС облучает окружающее пространства запросными импульсами на частоте P1 и P3, а также импульсом подавления P2 на частоте 1030 МГц. Воздушные суда оборудованные ответчиками находящиеся в зоне действия луча запроса при получении запросных импульсов, если действует условие P1,P3>P2 отвечают запросившей РЛС, Серией кодированных импульсов на частоте 1090 МГц, в которых содержится дополнительная информация типа Номер борта, Высота и так далее. Ответ самолётного ответчика зависит от режима запроса РЛС, а режим запроса определяется растоянием между запросными импульсами P1 и P3 например в режиме запроса А (mode A), расстояние между запросными импульсами станции P1 и P3 равно 8 микросекунд, и при получении такого запроса ответчик воздушного судна кодирует в импульсах ответа свой номер борта. В режиме запроса C (mode C) расстояние между запросными импульсами станции равно 21 микросекунде и при получении такого запроса ответчик воздушного судна кодирует в импульсах ответа свою высоту. Также РЛС может посылать запрос в смешанном режиме, например Режим А, Режим С, Режим А, Режим С. Азимут Воздушного судна определяется, углом поворота антенны, который в свою очередь определяется путём подсчёта Малых Азимутальных меток. Дальность определяется, по задержке пришедшего ответа Если Воздушное судно не лежит в зоне действия основного луча, а лежит в зоне действия боковых лепестков, или находится сзади антенны, то ответчик Воздушного судна при получении запроса от РЛС, получит на своём входе условие, что импульсы P1,P3
Плюсы вторичной РЛС, более высокая точность, дополнительная информация о Воздушном Судне (Номер борта, Высота), а также малое по сравнению с Первичными РЛС излучение.
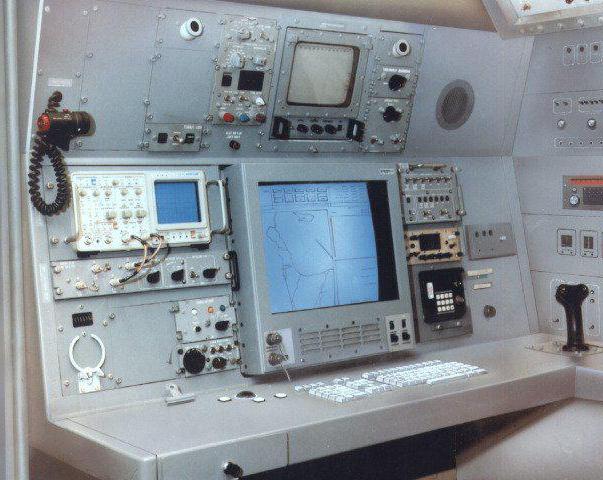
Прежде, чем переходить к конкретным приборам, кратко познакомимся с основными элементами и принципами работы радиолокатора.

Рис. 70. Состав судового радиолокатора
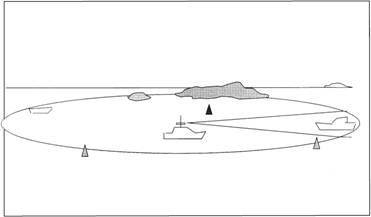
Рис. 71. Принцип действия судового радиолокатора
Принцип работы эхолотов
Принцип работы системы спутниковой навигации
Принцип работы системы спутниковой навигации В настоящее время в мире существуют две глобальных системы определения координат – российская ГЛОНАСС и американская NavStar, более известная как GPS (аббревиатура названия Global Position System – глобальная система позиционирования). В
4.3.1. Принцип работы устройства
4.3.1. Принцип работы устройства Описание принципа работы поможет тем читателям, кто захочет сделать из рекомендуемых готовых устройств – радиозвонков новое дистанционное управление своим водопроводным насосом на любимой даче.Вывод 2 микросхемы с обозначением (на
2.1.1. Принцип работы устройства
2.1.1. Принцип работы устройства На логических элементах микросхемы DD1.1, DD1.2 К561ЛА7 собран сигнализатор влажности. Перед этим узлом стоит важная задача – сигнализировать о сухой почве и не допустить ее переувлажнения, так как в последнем случае это может погубить цветы.
2.2.1. Принцип работы приставки
2.2.1. Принцип работы приставки При включении питания в первый момент времени на вход R DD1.1 благодаря разряженному конденсатору С2 поступает высокий логический уровень, который обнуляет триггер так, чтобы на прямом выходе Q установился низкий уровень напряжения. Транзистор
2.3.1. Принцип работы устройства
2.3.1. Принцип работы устройства Принцип работы устройства таков.Включение маячка осуществляется с помощью включателя SB1. Принцип работы мультивибратора подробно описан в литературе.В первый момент времени на выводе 3 микросхемы DA1 высокий уровень напряжения и светодиоды
Принцип действия
Принцип действия Возможность поворота цилиндра зависит от положения пинов, которое в свою очередь определяется силой тяжести, действием пружин и усилием ключа (или отмычки; информацию об отмычках см. в главе 9). При отсутствии ключа сила тяжести и пружины вдавливают
Принцип работы
Принцип работы На рис. 7.22 приведен покомпонентный вид типичного цилиндра, на котором видны основные элементы двойной замочной системы Medeco. Наиболее важный компонент – набор пиновых механизмов секретности, которые должны подниматься вырезами ключа. Еще один важный

Радиолокация - это совокупность научных методов и технических средств, служащих для определения координат и характеристик объекта посредством радиоволн. Исследуемый объект часто именуют радиолокационной целью (или просто целью).
Принцип радиолокации
Радиотехническое оборудование и средства, предназначенные для выполнения задач радиолокации, получили название радиолокационных систем, или устройств (РЛС или РЛУ). Основы радиолокации базируются на следующих физических явлениях и свойствах:
- В среде распространения радиоволны, встречая объекты с иными электрическими свойствами, рассеиваются на них. Волна, отраженная от цели (или ее собственное излучение), позволяет радиолокационным системам обнаружить и идентифицировать цель.
- На больших расстояниях распространение радиоволн принимается прямолинейным, с постоянной скоростью в известной среде. Это допущение делает возможным измерение дальности до цели и ее угловых координат (с определенной ошибкой).
- На основании эффекта Доплера по частоте принятого отраженного сигнала вычисляют радиальную скорость точки излучения относительно РЛУ.
Историческая справка
На способность радиоволн к отражению указывали великий физик Г. Герц и русский электротехник А.С. Попов еще в конце XIX века. Согласно патенту от 1904 года, первый радар создал немецкий инженер К. Хюльмайер. Прибор, названный им телемобилоскопом, использовался на судах, бороздивших Рейн. В связи с развитием авиационной техники применение радиолокации выглядело очень перспективным в качестве элемента противовоздушной обороны. Исследования в этой области велись передовыми специалистами многих стран мира.
В 1932 году основной принцип радиолокации описал в своих работах научный сотрудник ЛЭФИ (Ленинградского электрофизического института) Павел Кондратьевич Ощепков. Им же в сотрудничестве с коллегами Б.К. Шембель и В.В. Цимбалиным летом 1934 года был продемонстрирован опытный образец радиолокационной установки, обнаружившей цель на высоте 150 м при удалении 600 м. Дальнейшие работы по совершенствованию средств радиолокации сводились к увеличению дальности их действия и повышению точности определения местоположения цели.

Виды радиолокации
Природа электромагнитного излучения цели позволяет говорить о нескольких видах радиолокации:
- Пассивная радиолокация исследует собственное излучение (тепловое, электромагнитное и т.п.), которое генерирует цели (ракеты, самолеты, космические объекты).
- Активная с активным ответом осуществляется в случае, если объект оборудован собственным передатчиком и взаимодействие с ним происходит по алгоритму "запрос - ответ".
- Активная с пассивным ответом предполагает исследование вторичного (отраженного) радиосигнала. Радиолокационная станция в этом случае состоит из передатчика и приемника.
- Полуактивная радиолокация - это частный случай активной, в случае когда приемник отраженного излучения расположен вне РЛС (например, является конструктивным элементом самонаводящейся ракеты).
Каждому виду свойственны свои достоинства и недостатки.

Методы и оборудование
Все средства радиолокации по используемому методу разделяют на РЛС непрерывного и импульсного излучения.
Первые содержат в своем составе передатчик и приемник излучения, действующие одновременно и непрерывно. По этому принципу были созданы первые радиолокационные устройства. Примером такой системы могут служить радиоальтиметр (авиационный прибор, определяющий удаление летательного аппарата от поверхности земли) или известный всем автолюбителям радар для определения скоростного режима транспортного средства.
При импульсном методе электромагнитная энергия излучается короткими импульсами в течение нескольких микросекунд. После генерации сигнала станция ведет работу только на прием. После улавливания и регистрации отраженных радиоволн РЛС передает новый импульс и циклы повторяются.
Режимы работы РЛС
Существует два основных режима функционирования радиолокационных станций и устройств. Первый - сканирование пространства. Он осуществляется по строго заданной системе. При последовательном обзоре перемещение луча радара может носить круговой, спиральный, конический, секторный характер. Например, решетка антенны может медленно поворачиваться по кругу (по азимуту), одновременно сканируя по углу места (наклоняясь вверх и вниз). При параллельном сканировании обзор осуществляется пучком радиолокационных лучей. Каждому соответствует свой приемник, ведется обработка сразу нескольких информационных потоков.
Режим слежения подразумевает постоянную направленность антенны на выбранный объект. Для ее поворота, согласно с траекторией движущейся цели, используются специальные автоматизированные следящие системы.
Алгоритм определения дальности и направления
Скорость распространения электромагнитных волн в атмосфере составляет 300 тыс. км/с. Поэтому, зная время, затраченное транслируемым сигналом на преодоление расстояния от станции до цели и обратно, легко вычислить удаленность объекта. Для этого необходимо точно зафиксировать время отправки импульса и момент принятия отраженного сигнала.
Для получения информации о местонахождении цели используется остронаправленная радиолокация. Определение азимута и элевации (угла места или возвышения) объекта производится антенной с узким лучом. Современные РЛС используют для этого фазированные антенные решетки (ФАР), способные задавать более узкий луч и отличающиеся высокой скоростью вращения. Как правило, процесс сканирования пространства совершается минимум двумя лучами.
Основные параметры систем
От тактических и технических характеристик оборудования во многом зависит эффективность и качество решаемых задач.
К тактическим показателям РЛС причисляют:
- Зону обзора, ограниченную минимальной и максимальной дальностью обнаружения цели, допустимым азимутальным углом и углом возвышения.
- Разрешающую способность по дальности, азимуту, элевации и скорости (возможность определять параметры рядом расположенных целей).
- Точность измерений, которая измеряется наличием грубых, систематических или случайных ошибок.
- Помехозащищенность и надежность.
- Степень автоматизации извлечения и обработки поступающего потока информационных данных.
Заданные тактические характеристики закладываются при проектировании устройств посредством определенных технических параметров, среди которых:
- несущая частота и модуляция генерируемых колебаний;
- диаграммы направленности антенн;
- мощность передающих и принимающих устройств;
- габаритные размеры и масса системы.
На боевом посту
Радиолокация - это универсальный инструмент, получивший широкое распространение в военной сфере, науке и народном хозяйстве. Области использования неуклонно расширяются благодаря развитию и совершенствованию технических средств и технологий измерений.
Применение радиолокации в военной отрасли позволяет решить важные задачи обзора и контроля пространства, обнаружения воздушных, наземных и водных мобильных целей. Без радаров невозможно представить оборудование, служащее для информационного обеспечения навигационных систем и систем управления орудийным огнем.
Военная радиолокация является базовой составляющей стратегической системы предупреждения о ракетном нападении и комплексной противоракетной обороны.

Радиоастрономия
Посланные с поверхности земли радиоволны также отражаются от объектов в ближнем и дальнем космосе, как и от околоземных целей. Многие космические объекты невозможно было полноценно исследовать лишь с использованием оптических инструментов, и только применение радиолокационных методов в астрономии позволило получить богатую информацию об их природе и структуре. Впервые пассивная радиолокация для исследования Луны была применена американскими и венгерскими астрономами в 1946 году. Примерно в то же время были случайно приняты и радиосигналы из космического пространства.
У современных радиотелескопов приемная антенна имеет форму большой вогнутой сферической чаши (подобно зеркалу оптического рефлектора). Чем больше ее диаметр, тем более слабый сигнал антенна сможет принять. Часто радиотелескопы работают комплексно, объединяя не только устройства, расположенные недалеко друг от друга, но и находящиеся на разных континентах. Среди важнейших задач современной радиоастрономии - изучение пульсаров и галактик с активными ядрами, исследование межзвездной среды.

Гражданское применение
В сельском и лесном хозяйстве радиолокационные устройства незаменимы при получении информации о распределении и плотности растительных массивов, изучении структуры, параметров и видов почв, своевременном обнаружении очагов возгораний. В географии и геологии радиолокация используется для выполнения топографических и геоморфологических работ, определения структуры и состава пород, поиска месторождений полезных ископаемых. В гидрологии и океанографии радиолокационными методами осуществляется контроль состояния главных водных артерий страны, снегового и ледяного покрова, картографирование береговой линии.
Радиолокация - это незаменимый помощник метеорологов. РЛС легко выяснит состояние атмосферы на удалении десятков километров, а по анализу полученных данных составляется прогноз изменения погодных условий в той или иной местности.

Перспективы развития
Для современной радиолокационной станции главным оценочным критерием выступает соотношение эффективности и качества. Под эффективностью понимаются обобщенные тактико-технические характеристики оборудования. Создание совершенной РЛС - сложная инженерная и научно-техническая задача, осуществление которой возможно только с использованием новейших достижений электромеханики и электроники, информатики и вычислительной техники, энергетики.
По прогнозам специалистов, в ближайшем будущем главными функциональными узлами станций самого разного уровня сложности и назначения будут твердотельные активные ФАР (фазированные антенные решетки), преобразующие аналоговые сигналы в цифровые. Развитие вычислительного комплекса позволит полностью автоматизировать управление и основные функции РЛС, предоставив конечному потребителю всесторонний анализ полученной информации.
Читайте также: