
Правила выбора электродвигателя кратко
Обновлено: 03.07.2024
Список ключевых параметров, которым надо уделить внимание в первую очередь, выглядит так:
- Питающее оборудование и его совместимость с предпочтительной моделью.
- Вид тока.
- Мощностные показатели.
- Режимы работы.
- Исполнение для регионов с разным климатом.
- Класс защиты корпуса.
Типы электрических двигателей
По типу питания двигатели делят на 2 большие группы: устройства, работающие от постоянного либо переменного тока.
Оборудование первой группы используется реже, хотя не так давно оно пользовалось огромным спросом. Но с появлением электрических двигателей переменного тока ситуация изменилась.
Недостаток выбора электродвигателей постоянного тока — собственно, потребность в доступе к току с постоянным значением напряжения. Для эксплуатации нужен либо его источник, либо мощный прибор-преобразователь напряжения.
При тех характеристиках современных сетей электроснабжения, к каким подключены промышленные и производственные объекты, соблюдение любого из двух условий является для пользователя необоснованно затратным. Хотя в некоторых случаях работа с электрическими двигателями постоянного тока выгодна предприятиям в силу увеличенной по сравнению с аналогами стабильности такого оборудования при его использовании с высокими загрузками.
Основные пользователи таких устройств:
- предприятия металлургии;
- заводы станкостроения;
- производители и постоянные пользователи мощного электротранспорта.
Двигатели переменного тока делятся на подклассы. Их два: синхронные и асинхронные. Сфера применения механизмов обоих подклассов гораздо шире, особенно это касается последнего варианта.
Выбор электродвигателя асинхронного типа производства обусловлен большим разнообразием его моделей, адаптированных для эксплуатации в разных технико-технологических, климатических и организационных условиях. Несколько примеров для наглядности:
- Для обслуживания механизмов, работающих с остановками (плановыми или вынужденными, когда оборудованию требуется фиксация вала после аварийного отключения энергии), незаменимы асинхронные механизмы, оснащаемые электромагнитным тормозом. Они нашли широкое применение в лебедках, различных станках, в том числе металлообрабатывающих.
- Многоскоростные устройства применяют там, где требуется поступательное регулируемое изменение скорости работы — в подъемниках, лифтах и т. д.
- Выбор электродвигателя с увеличенным скольжением оправдан при работе с техникой, которая эксплуатируется по графику (повторно-кратковременные режимы запуска и остановки), или работает с пульсирующей нагрузкой.
Выбор электродвигателя по типу питания должен учитывать специфику оснащения и организации конкретной рабочей площадки, условия эксплуатации оборудования, технические нюансы его запуска и остановки, режимный фактор. Только определившись с типом по виду тока (и обосновав его фактами), можно переходить к расчетам рабочих характеристик требуемой техники, а именно:
- мощности электродвигателя и его потребления;
- номинальных моментов;
- начальных (пусковых) моментов;
- коэффициентов мощности;
- параметров энергоэффективности.

Климатическое исполнение
Редукторы классифицируются на типы по эксплуатации с учетом особенностей окружающей среды:
- В — все районы. В данном случае подразумеваются районы, условия которых позволяют вести производство, т.е. полюса холода исключаются;
- ОМ/ТМ — морская версия, предназначенная для работы с высоким уровнем влажности, ОМ для тропических районов, ТМ в привычном климате;
- О — универсальный климат без экстремальных условий;
- Т — эксплуатация в термических условиях (в районе жаркого климата или возле котла/печи);
- ХЛ — холодный климат, субарктический пояс;
- УХЛ — умеренно-холодный климат;
- У — умеренный климат (средние широты).
С учетом климатического исполнения редукторы бывают с закрытым и открытым механизмом передачи крутящего момента оборудованию.
Обоснованный выбор электродвигателя по мощности

Выбор электродвигателя по мощности зависит от специфики эксплуатации оборудования, к которому он подключается. Нагрузки оценивают по номинальному режиму и изменениям величины мощности потребления. При этом расчетная величина должна обеспечивать работу электродвигателя:
- с нормальным нагревом;
- достаточным пусковым моментом;
- перегрузочной способностью в установленных пределах.
Правильным будет считаться выбор электродвигателя по мощности, при которой он, принимая нагрузки, предусмотренные техническим процессом, будет нагреваться не выше допустимой температуры для каждой из основных частей сборки. Неправильный выбор — с большим запасом ресурса, который ведет к недоиспользованию производительности, а значит, и переплатам за обслуживание более дорогой модели, ее ремонт, сниженные относительные показатели работы (включая КПД).
Мощность электродвигателя
Важный критерий выбора – мощность на валу, требуемая с учетом режима работы техники, к которой подключен электрический привод. Это расчетная величина, которую считают по формуле:
- Р — искомая характеристика;
- Pм — мощность, потребляемая механизмом;
- ηп — паспортный коэффициент полезного действия (КПД).
По формуле определяют фактическое требуемое значение, номинал должен быть немного выше. Для наглядности разберем несколько примеров расчета мощности электродвигателя для распространенных и востребованных типов техники.
Формула расчета мощности электродвигателя для насоса
Методика выбора электродвигателя здесь использует следующую двухвариантную формулу:
- P — искомая величина для привода насоса;
- k3 — относительный показатель, учитывающий необходимость небольшого запаса, принимается равным от 1,1 до 1,3;
- g — ускорение силы тяжести (свободного падения);
- Q — производительность оборудования;
- H — расчетная высота;
- y — плотность рабочей среды, которую перекачивает насосная техника при эксплуатации:
- p — уровень давления в насосе;
- ηнас — КПД подключаемого насосного оборудования;
- ηп — КПД привода.
Показатель p (давление) определяется произведением высоты подъема, ускорения свободного падения и плотности перекачиваемой жидкости.
Формула расчета мощности электродвигателя для компрессора
Формула, которую обычно используют для расчета мощности электродвигателя привода компрессора, имеет такой вид:
- Q — производительность компрессорной техники.
- А — усилие, требуемое для сжатия 1 кубометра воздуха до нужных значений давления, измеряется в Дж/куб. м.
- ηk — индикаторный КПД, выбирается в диапазоне значений 0,6-0,8.
- ηп — коэффициент полезного действия передачи (0,9-0,95).
- k3 — запас (5-15%, показатель принимается равным 1,05-1,15).
Значение А рассчитывается по формуле:
Формула расчета мощности электродвигателя для вентиляторов
При выборе электродвигателей привода осевых и центробежных вентиляторов применяется следующая формула расчета.
- Коэффициент k3 — запас, выбирается из диапазона от 1,1 до 2 в зависимости от паспортной мощности электродвигателя: k3 = 1,1-1,2 для моделей от 5 кВт и выше;
- k3 = 1,5, если это 1-2 кВт;
- для моделей до 1 кВт коэффициент принимается равным 2.
-
0,4-0,7, если это центробежная модель;
Соотношение момента M [Нм] и полезной мощности на валу Р2 [кВт]
Соотнести развиваемый момент (M [Нм]) и полезную мощность электродвигателя в кВт можно следующим способом:
Формулы расчета выглядят так.
- Полная мощность электродвигателя:
- Для электрического двигателя постоянного тока.
- При выборе электродвигателя переменного тока.
2. Активная и Реактивная мощность
Важный момент: если реактивная мощность при расчете для конкретных условий эксплуатации отрицательная, значит, электродвигатель отдает ее в сеть.
На что следует обращать внимание при выборе устройства?
Если вам требуется произвести выбор электродвигателя для производства, либо для применения в другой сфере, следует обратить внимание на такие факторы:
- способ питания;
- вид электрического тока;
- режим эксплуатации;
- воздействие внешней среды на оборудование.
Современная модель электродвигателя, должна функционировать от сети с частотой от 50 до 60 Гц, чтобы обеспечить её использование в любой точке мира. Двигатель должен демонстрировать высокий показатель КПД и отвечать всем международным нормам.
Пусковой ток
Номинальный ток определяют так:
Для механизмов постоянного тока.
Для трехфазных синхронных и асинхронных.
- PH — мощность электродвигателя (номинальная, по паспорту);
- ηH — КПД электрического двигателя (в технической документации);
- cosfH — относительный показатель мощности электродвигателя;
- UH — напряжение электрического двигателя (паспортное, номинальное).

Выбор электродвигателя по напряжению начинается с анализа параметров сети энергоснабжения на конкретном предприятии. При высоких мощностных показателях не стоит выбирать устройство с малым напряжением. Это потребует значительных дополнительных вложений, часто неоправданных (от медных питающих проводов до коммутаторов).
Режимы эксплуатации
Режим эксплуатации привода задает уровень нагрузки на электрический двигатель. Она может быть константной (или почти неизменной) и меняющейся. В любом случае ее характер надо учитывать в расчетах при выборе электродвигателя. База для анализа — режимы, предусмотренные действующими стандартами. Для электрического двигателя их принято 9, обозначаются они буквой S и цифрой.
- S1 — продолжительная нагрузка, постоянная на протяжении всего срока, пока внутренняя температура в корпусе не достигнет предельных значений.
- S2 — кратковременный режим эксплуатации (температура за все время работы привода не достигает установленного уровня). В период простоя двигатель охлаждается до температуры окружения. При выборе электродвигателя для недлительных нагрузок важно учитывать перегрузочную способность электрического привода.
- S3 — периодическая кратковременная нагрузка. В этом случае включение-выключение механизма осуществляется по некоему графику. Во время работы элементы устройства не успевают нагреться до установленных в паспорте значений, а в период остановок они полностью охлаждаются. При выборе важно учесть конкретный график — длительность остановок, потери на переходах и допустимое количество включений привода за установленную единицу времени.
- S4 — кратковременный по графику с частыми запусками.
- S5 — периодический краткосрочный с электроторможением. Как и в случае с режимом S4, особенности выбора электродвигателя для таких условий эксплуатации — те же, что и для S
- S6 (непрерывный периодический кратковременный). Запуски чередуются с холостым ходом.
- S7 (по графику с непрерывной недлительной работой и электроторможением).
- S8 (периодический с непрерывной работой в короткие промежутки времени, предусматривает изменение нагрузки и частоты вращения одновременно).
- S9 — непериодическая работа, меняющаяся одновременно с частотой вращения вала. К ней адаптированы большинство современных двигателей, рассчитанные на продолжительную эксплуатацию.
Какой мотор-редуктор выбрать
Конфигурация агрегата зависит исключительно от условий работы и оборудования, для которого он требуется:
- Для обычных металло- и деревообрабатывающих станков можно брать синхронный двигатель и редуктор с планетарным механизмом. Такая схема мотор-редуктора выгодна и для воздушных и циркуляционных насосов.
- Для любых подъемников нужен червячной редуктор, который плавно запускает и останавливает механизм.
- Стационарным и мобильным (перфораторы) устройствам сверления-долбления для оптимальной работы потребуется цилиндрический редуктор. Работа с разным материалом требует отличной мощности.
Для вентиляторов не имеет значения схема мотор-редуктора. Ее особенность лишь влияет на качество работы:
- Червячной редуктор с плавным запуском немногим продлит срок службы механизмов вентилятора (при отсутствии свободного хода);
- Цилиндрический дает несколько режимов, следовательно, вентилятор можно эксплуатировать максимально эффективно без риска выхода из строя;
- С планетарным редуктором будет только один режим работы, однако сам агрегат будет самым дешевым вариантом.
- При учете климатического исполнения следует учитывать не только окружающую среду, но и техногенные факторы, которые могут повлиять на работу редуктора. Например, для эксплуатации возле котла пригоден только T-редуктор, рассчитанный на работу при высоких температурах.
Заказывать мотор-редуктор лучше у одного производителя:
- У поставщика могут возникнуть сложности при подборе редуктора под сторонний двигатель. Как минимум, покупка усложнится, а продавец может не дать гарантии работоспособности.
- При выборе агрегата производитель уже знает удачные и эффективные комбинации своих двигателей и редукторов. В долговечности такого устройства можно не сомневаться.
Естественно, нужно заказывать мотор-редуктор только у надежного поставщика и о покупки б/у не может идти речь.
Энергоэффективность
Энергоэффективность — показатель рациональности эксплуатации оборудования, когда его потребление остается минимально возможным при достаточном уровне нагрузки. Это одно из ключевых условий окупаемости вложений средств в производственное оборудование. Оценить энергоэффективность двигателя можно по его КПД, который определяется по формуле:
- P2 — полезная мощность электродвигателя на валу;
- P1 — потребление (активная мощность, потребляемая для работы привода из сети).
Современный рынок электрических двигателей стандартизован по классам энергоэффективности. Их определяет международный стандарт IEC 60034-30. Всего таких классов 3 (IE 1-3). Чем выше класс энергоэффективности, тем больше экономит пользователь устройства. К примеру, выбор механизма на 55 кВт повышенного класса энергоэффективности сэкономит предприятию до 8000 кВт ресурса в год.
Первый запуск
Перед подключением к оборудованию требуется проверить работоспособность агрегата отдельно. Для этого достаточно провести простой эксперимент с лампой накаливания любой мощности. Нужно разбить и очистить ее от стекла, и проводами подвести контакты к патрону. Т.к. мощность лампы намного ниже (не более 120 Вт), нить накаливания быстро перегорит. Если ничего не произошло, проверите:
- Питание. Возможно, отключена электросеть или неисправны подводящие провода к агрегату.
- Подводящие к патрону провода. Т.к. между агрегатом и лампой накаливания огромная разница в мощности, тонкие провода могут быстро выгореть, не передав напряжение на нить накаливания. Нужно использовать только толстые провода.
Когда все сделано и мотор-редуктор исправен, нужно выполнить первый запуск. Перед этим важно смазать все механизмы. Желательно качественным маслом, т.к. проверка агрегата на производстве могла быть проведена давно, и жидкость в труднодоступных местах уже высохла. Есть контакт и все хорошо. Когда пуск выполнен, требуется ждать около получаса для разогрева всех механизмов, после чего менять скорость вращения (если используется цилиндрический редуктор).
На этом завершается первичный пуск и мотор-редуктор готов к постоянной эксплуатации. Остановив двигатель после первого запуска, рекомендуется проверить механизмы на стыке. Если они практически сухие, а при работе был сильный шум, используется некачественная смазка и нужно купить другую продукцию.
Электродвигатель – механизм, преобразующий энергию электрического тока в кинетическую энергию. Современное производство и быт сложно представить без машин с электроприводом. Они используются в насосном оборудовании, системах вентиляции и кондиционирования, в электротранспорте, промышленных станках различных типов и т.д.
При выборе электродвигателя необходимо руководствоваться несколькими основными критериями:
- вид электрического тока, питающего оборудование;
- мощность электродвигателя;
- режим работы;
- климатические условия и другие внешние факторы.
Типы двигателей
Электродвигатели постоянного и переменного тока
В зависимости от используемого электрического тока двигатели делятся на две группы:
- приводы постоянного тока;
- приводы переменного тока.
Электродвигатели постоянного тока сегодня применяются не так часто, как раньше. Их практически вытеснили асинхронные двигатели с короткозамкнутым ротором.

Главный недостаток электродвигателей постоянного тока – возможность эксплуатации исключительно при наличии источника постоянного тока или преобразователя переменного напряжения в постоянный ток. В современном промышленном производстве обеспечение данного условия требует дополнительных финансовых затрат.
Тем не менее, при существенных недостатках этот тип двигателей отличается высоким пусковым моментом и стабильной работой в условиях больших перегрузок. Приводы данного типа чаще всего применяются в металлургии и станкостроении, устанавливаются на электротранспорт.
Принцип работы электродвигателей переменного тока построен на электромагнитной индукции, возникающей в процессе движения проводящей среды в магнитном поле. Для создания магнитного поля используются обмотки, обтекаемые токами, либо постоянные магниты.
Электродвигатели переменного тока подразделяются на синхронные и асинхронные. У каждой подгруппы есть свои конструктивные и эксплуатационные особенности.
Синхронные электродвигатели
Синхронные двигатели – оптимальное решение для оборудования с постоянной скоростью работы: генераторов постоянного тока, компрессоров, насосов и др.
Технические характеристики синхронных электродвигателей разных моделей отличаются. Скорость вращения колеблется в диапазоне от 125 до 1000 оборотов/мин, мощность может достигать 10 тысяч кВт.
В конструкции приводов предусмотрена короткозамкнутая обмотка на роторе. Ее наличие позволяет осуществлять асинхронный пуск двигателя. К преимуществам оборудования данного типа относятся высокий КПД и небольшие габариты. Эксплуатация синхронных электродвигателей позволяет сократить потери электричества в сети до минимума.
Асинхронные электродвигатели
Асинхронные электродвигатели переменного тока получили наибольшее распространение в промышленном производстве. Особенностью данных приводов является более высокая частота вращения магнитного поля по сравнению со скоростью вращения ротора.
В современных двигателях для изготовления ротора используется алюминий. Легкий вес этого материала позволяет уменьшить массу электродвигателя, сократить себестоимость его производства.
КПД асинхронного двигателя падает почти вдвое при эксплуатации в режиме низких нагрузок – до 30-50 процентов от номинального показателя. Еще один недостаток таких электроприводов состоит в том, что параметры пускового тока почти втрое превышают рабочие показатели. Для уменьшения пускового тока асинхронного двигателя используются частотные преобразователи или устройства плавного пуска.
Асинхронные электродвигатели удовлетворяют требованиям разных промышленных применений:
- Для лифтов и другого оборудования, требующего ступенчатого изменения скорости, выпускаются многоскоростные асинхронные приводы.
- При эксплуатации лебедок и металлообрабатывающих станков используются электродвигатели с электромагнитной тормозной системой. Это обусловлено необходимостью остановки привода и фиксации вала при перебоях напряжения или его исчезновения.
- В процессах с пульсирующей нагрузкой или при повторно-кратковременных режимах могут использоваться асинхронные электродвигатели с повышенными параметрами скольжения.
Вентильные электродвигатели
Группа вентильных электродвигателей включает в себя приводы, в которых регулирование режима эксплуатации осуществляется посредством вентильных преобразователей.
К преимуществам данного оборудования относятся:
- Высокий эксплуатационный ресурс.
- Простота обслуживания за счет бесконтактного управления.
- Высокая перегрузочная способность, которая в пять раз превышает пусковой момент.
- Широкий диапазон регулирования частоты вращения, который почти вдвое выше диапазона асинхронных электродвигателей.
- Высокий КПД при любой нагрузке – более 90 процентов.
- Небольшие габариты.
- Быстрая окупаемость.
Мощность электродвигателя
В режиме постоянной или незначительно изменяющейся нагрузки работает большое количество механизмов: вентиляторы, компрессоры, насосы, другая техника. При выборе электродвигателя необходимо ориентироваться на потребляемую оборудованием мощность.
Определить мощность можно расчетным путем, используя формулы и коэффициенты, приведенные ниже.
Мощность на валу электродвигателя определяется по следующей формуле:

где:
Рм – потребляемая механизмом мощность;
ηп – КПД передачи.
Номинальную мощность электродвигателя желательно выбирать больше расчетного значения.
Формула расчета мощности электродвигателя для насоса

где:
K3 – коэффициента запаса, он равен 1,1-1,3;
g –ускорение свободного падения;
Q – производительность насоса;
H – высота подъема (расчетная);
Y – плотность перекачиваемой насосом жидкости;
ηнас – КПД насоса;
ηп – КПД передачи.
Давление насоса рассчитывается по формуле:

Формула расчета мощности электродвигателя для компрессора
Мощность поршневого компрессора легко рассчитать по следующей формуле:

где:
Q – производительность компрессора;
ηk – индикаторный КПД поршневого компрессора (0,6-0,8);
ηп – КПД передачи (0,9-0,95);
K3 – коэффициент запаса (1,05 -1,15).
Значение A можно рассчитать по формуле:

или взять из таблицы
| p2, 10 5 Па | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 |
| A, 10 -3 Дж/м³ | 132 | 164 | 190 | 213 | 230 | 245 | 260 | 272 |
Формула расчета мощности электродвигателя для вентиляторов

где:
K3 – коэффициент запаса. Его значения зависят от мощности двигателя:
- до 1 кВт – коэффициент 2;
- от 1 до 2 кВт – коэффициент 1,5;
- 5 и более кВт – коэффициент 1,1-1,2.
Q – производительность вентилятора;
H – давление на выходе;
ηв – КПД вентилятора;
ηп – КПД передачи.
Приведенная формула используется для расчета мощности осевых и центробежных вентиляторов. КПД центробежных моделей равен 0,4-0,7, а осевых вентиляторов – 0,5-0,85.
Остальные технические характеристики, необходимые для расчета мощности двигателя, можно найти в каталогах для каждого типа механизмов.
ВАЖНО! При выборе электродвигателя запас мощности должен быть, но небольшой. При значительном запасе мощности снижается КПД привода. В электродвигателях переменного тока это приводит еще и к снижению коэффициента мощности.
Пусковой ток электродвигателя
Зная тип и номинальную мощность электродвигателя, можно рассчитать номинальный ток.
Номинальный ток электродвигателей постоянного тока

Номинальный ток трехфазных электродвигателей переменного тока

где:
PH – номинальная мощность электродвигателя;
UH — номинальное напряжение электродвигателя,
ηH — КПД электродвигателя;
cosfH — коэффициент мощности электродвигателя.
Номинальные значения мощности, напряжения и КПД можно найти в технической документации на конкретную модель электродвигателя.
Зная значение номинального тока, можно рассчитать пусковой ток.
Формула расчета пускового тока электродвигателей

где:
IH – номинальное значение тока;
Кп – кратность постоянного тока к номинальному значению.
Пусковой ток необходимо рассчитывать для каждого двигателя в цепи. Зная эту величину, легче подобрать тип автоматического выключателя для защиты всей цепи.
Режимы работы электродвигателей
Режим работы определяет нагрузку на электродвигатель. В некоторых случаях она остается практически неизменной, в других может изменяться. Характер предполагаемой нагрузки обязательно учитывается при выборе двигателя. Действующими стандартами предусмотрены следующие режимы эксплуатации:
Режим S1 (продолжительный). При таком режиме эксплуатации нагрузка остается постоянной в течение всего времени, пока температура электродвигателя не достигнет необходимого значения. Мощность привода рассчитывается по формулам, приведенным выше.
Режим S2 (кратковременный). При эксплуатации в этом режиме температура двигателя в период его включения не достигает установившегося значения. За время отключения электродвигатель охлаждается до температуры окружающей среды. При кратковременном режиме эксплуатации необходимо проверять перегрузочную способность электропривода.
Режим S3 (периодически-кратковременный). Электродвигатель работает с периодическими отключениями. В периоды включения и отключения его температура не успевает достигнуть заданного значения или охладиться до температуры окружающей среды. При расчете мощности двигателя обязательно учитывается продолжительность пауз и потерь в переходные периоды. При выборе электродвигателя важным параметром является допустимое количество включений за единицу времени.
Режимы S4 (периодически-кратковременный, с частыми пусками) и S5 (периодически-кратковременный с электрическим торможением). В обоих случаях работа двигателя рассматривается по тем же параметрам, что и в режиме эксплуатации S3.
Режим S6 (периодически-непрерывный с кратковременной нагрузкой). Работа электродвигателя в данном режиме предусматривает эксплуатацию под нагрузкой, чередующуюся с холостым ходом.
Режим S7 (периодически-непрерывный с электрическим торможением)
Режим S8 (периодически-непрерывный с одновременным изменением нагрузки и частоты вращения)
Режим S9 (режим с непериодическим изменением нагрузки и частоты вращения)
Большинство моделей современных электроприводов, эксплуатируемых продолжительное время, адаптированы к изменяющемуся уровню нагрузки.
Климатические исполнения электродвигателей
При выборе электродвигателя учитываются не только его технические характеристики, но и условия окружающей среды, в которых он будет эксплуатироваться.
Современные электроприводы выпускаются в разных климатических исполнениях. Категории маркируются соответствующими буквами и цифрами:
- У – модели для эксплуатации в умеренном климате;
- ХЛ – электродвигатели, адаптированные к холодному климату;
- ТС – исполнения для сухого тропического климата;
- ТВ – исполнения для влажного тропического климата;
- Т – универсальные исполнения для тропического климата;
- О – электродвигатели для эксплуатации на суше;
- М – двигатели для работы в морском климате (холодном и умеренном);
- В – модели, которые могут использоваться в любых зонах на суше и на море.
Цифры в номенклатуре модели указывают на тип ее размещения:
- 1 – возможность эксплуатации на открытых площадках;
- 2 – установка в помещениях со свободным доступом воздуха;
- 3 – эксплуатация в закрытых цехах и помещениях;
- 4 – использование в производственных и других помещениях с возможностью регулирования климатических условий (наличие вентиляции, отопления);
- 5 – исполнения, разработанные для эксплуатации в зонах повышенной влажности, с высоким образованием конденсата.
Энергоэффективность
Рациональное потребление энергии при сохраняющейся высокой мощности сокращает текущие производственные затраты при одновременном увеличении производительности электродвигателя. Поэтому при выборе привода обязательно учитывается класс энергоэффективности.
В технической документации и каталогах обязательно указывается класс энергоэффективности двигателя. Он зависит от показателя КПД.
Выбор электродвигателя и расчет его рабочих параметров
Далее приведены рекомендации по выбору электродвигателя (последовательность, в которой они представлены, не является обязательной).
На первом этапе необходимо определиться с типом электрического двигателя. Ниже даны краткое описание, преимущества и недостатки, сферы предпочтительного применения основных типов двигателей.
Типы электрических двигателей
Двигатели постоянного тока.
Основным преимуществом данных двигателей, которое определяло повсеместное их использование на этапе развития электрических приводов, является легкость плавного регулирования скорости в широких пределах. Поэтому с развитием полупроводниковой промышленности и появлением относительно недорогих преобразователей частоты процент их использования постоянно уменьшается. Там, где это возможно двигатели постоянного тока заменяются приводами на основе асинхронных двигателей с короткозамкнутым ротором. Основные недостатки двигателя постоянного тока (невысокая надежность, сложность обслуживания и эксплуатации) обусловлены наличием коллекторного узла. Кроме того, для питания двигателя необходим источник постоянного тока или тиристорный преобразователь переменного напряжения в постоянное. При всех своих недостатках двигатели постоянного тока обладают высоким пусковым моментом и большой перегрузочной способностью. Что определило их использование в металлургической промышленности, станкостроении и на электротранспорте.
Синхронные двигатели
Основным преимуществом данных двигателей является то, что они могут работать с коэффициентом мощности cosφ=1, а в режиме перевозбуждения даже отдавать реактивную мощность в сеть, что благоприятно сказывается на характеристиках сети: увеличивается ее коэффициент мощности, уменьшаются потери и падение напряжения. Кроме того, синхронные двигатели устойчивы к колебаниям сети. Максимальный момент синхронного двигателя пропорционален напряжению, при этом момент асинхронного двигателя пропорционален квадрату напряжения. Следовательно, при снижении напряжения синхронный двигатель сохраняет большую перегрузочную способность, а возможность форсировки возбуждения увеличивает надежность их работы при аварийных понижениях напряжения. Больший воздушный зазор по сравнению с асинхронным двигателем и применение постоянных магнитов делает КПД синхронных двигателей выше. Их особенностью также является постоянство скорости вращения при изменении момента нагрузки на валу.
При всех достоинствах синхронного двигателя основными недостатками, ограничивающими их применение являются сложность конструкции, наличие возбудителя, высокая цена, сложность пуска.
Поэтому синхронные двигатели преимущественно используются при мощностях свыше 100 кВт.
Основное применение – насосы, компрессоры, вентиляторы, двигатель-генераторные установки.
Асинхронные двигатели
По конструктивному принципу асинхронные двигатели подразделяются на двигатели с короткозамкнутым и фазным ротором. При этом большинство используемых электродвигателей являются асинхронными с короткозамкнутым ротором. Столь широкое применение обусловлено простотой их конструкции, обслуживания и эксплуатации, высокой надежностью, относительно низкой стоимостью. Недостатками таких двигателей являются большой пусковой ток, относительно малый пусковой момент, чувствительность к изменениям параметров сети, а для плавного регулирования скорости необходим преобразователь частоты. Кроме того, асинхронные двигатели потребляют реактивную мощность из сети. Предел применения асинхронных электродвигателей с короткозамкнутым ротором определяется мощностью системы электроснабжения конкретного предприятия, так как большие пусковые токи при малой мощности системы создают большие понижения напряжения.
Использование асинхронных двигателей с фазным ротором помогает снизить пусковой ток и существенно увеличить пусковой момент, благодаря введению в цепь ротора пусковых реостатов. Однако, ввиду усложнения их конструкции, и как следствие, увеличения стоимости их применение ограничено. Основное применение – приводы механизмов с особо тяжелыми условиями пуска. Для уменьшения пусковых токов асинхронного двигателя с короткозамкнутым ротором может быть использовано устройство плавного пуска или преобразователь частоты.
В системах, где необходимо ступенчатое изменение скорости (например, лифты) используют многоскоростные асинхронные двигатели. В механизмах, требующих остановки за определенное время и фиксации вала при исчезновении напряжения питания, применяются асинхронные двигатели с электромагнитным тормозом (металлообрабатывающие станки, лебедки). Существуют также асинхронные двигатели с повышенным скольжением, которые предназначены для работы в повторно-кратковременных режимах, а также режимах с пульсирующей нагрузкой.
После того, как определен тип электродвигателя, полностью учитывающий специфику рабочего механизма и условия работы, необходимо определиться с рабочими параметрами двигателя: мощностью, номинальным и пусковым моментами, номинальными напряжением и током, режимом работы, коэффициентом мощности, классом энергоэффективности.
Мощность и моменты
В общем случае для квалифицированного подбора электродвигателя должна быть известна нагрузочная диаграмма механизма. Однако, в случае постоянной или слабо меняющейся нагрузки без регулирования скорости достаточно рассчитать требуемую мощность по теоретическим или эмпирическим формулам, зная рабочие параметры нагрузки. Ниже приведены формулы для расчета мощности двигателя P2 [кВт] некоторых механизмов.
Вентилятор
где Q [м 3 /с] – производительность вентилятора, Н [Па] – давление на выходе вентилятора, ηвент, ηпер – КПД вентилятора и передаточного механизма соответственно, kз – коэффициент запаса.
Насос
где Q [м 3 /с] – производительность насоса, g=9,8 м/с 2 – ускорение свободного падения, H [м] – расчетная высота подъема, ρ [кг/м 3 ] – плотность перекачиваемой жидкости, ηнас, ηпер – КПД насоса и передаточного механизма соответственно, kз – коэффициент запаса.
Поршневой компрессор
где Q [м 3 /с] – производительность компрессора, А [Дж/м 3 ] – работа изотермического и адиабатического сжатия атмосферного воздуха объемом 1 м 3 давлением 1,1·10 5 Па до требуемого давления, ηкомпр, ηпер – КПД компрессора и передаточного механизма соответственно, kз – коэффициент запаса.
Кроме того, необходимо сопоставить пусковой момент двигателя (особенно в случае асинхронного с короткозамкнутым ротором) и рабочего механизма, так как некоторые механизмы имеют повышенное сопротивление в момент трогания. Следует иметь в виду и то обстоятельство, что при замене трехфазного асинхронного двигателя на однофазный пусковой момент последнего почти в три раза меньше и механизм, успешно функционировавший ранее, может не тронуться с места.
Развиваемый электродвигателем момент M [Нм] и полезная мощность на валу Р2 [кВт] связаны следующим соотношением
Полная мощность, потребляемая из сети:
1. для двигателей постоянного тока (она же активная)
2. для двигателей переменного тока
при этом потребляемые активная и реактивная мощности соответственно
В случае синхронного двигателя значение Q1 может получиться отрицательным, это означает, что двигатель отдает реактивную мощность в сеть.
Важно отметить следующее. Не следует выбирать двигатель с большим запасом по мощности, так как это приведет к снижению его КПД, а в случае двигателя переменного тока также к снижению коэффициента мощности.
Напряжение и ток
При выборе напряжения электродвигателя необходимо учитывать возможности системы энергоснабжения предприятия. При этом нецелесообразно при больших мощностях выбирать двигатель с низким напряжением, так как это приведет к неоправданному удорожанию не только двигателя, но и питающих проводов и коммутационной аппаратуры вследствие увеличения расхода меди.
Режим работы
Нагрузка электродвигателя в процессе работы может изменяться различным образом. ГОСТом предусмотрены восемь режимов работы.
1. Продолжительный S1 – режим работы при постоянной нагрузке в течение времени, за которое температура двигателя достигает установившегося значения. Мощность двигателя, работающего в данном режиме, рассчитывается исходя из потребляемой механизмом мощности. Формулы расчета мощности некоторых механизмов (насос, вентилятор, компрессор) приведены выше.
2. Кратковременный S2 – режим, при котором за время включения на постоянную нагрузку температура двигателя не успевает достичь установившегося значения, а за время отключения двигатель охлаждается до температуры окружающей среды. В случае использования двигателя S1 для работы в режиме S2 необходимо проверить его только по перегрузочной способности, так как температура не успевает достичь допустимого значения.
3. Повторно-кратковременный S3 – режим с периодическим отключением двигателя, при котором за время включения температура не успевает достичь установившегося значения, а за время отключения – температуры окружающей среды. Расчет мощности электродвигателя обычного исполнения для работы в режиме S3 производится по методам эквивалентных величин с учетом пауз и потерь в переходных режимах. Кроме того, двигатель необходимо проверить на допустимое число включений в час. В случае большого числа включений в час рекомендуется использовать двигатели с повышенным скольжением. Данные электродвигатели обладают повышенным сопротивлением обмотки ротора, а, следовательно, меньшими пусковыми и тормозными потерями.
4. Повторно-кратковременный с частыми пусками S4 и повторно-кратковременный с частыми пусками и электрическим торможением S5. Данные режимы рассматриваются аналогично режиму S3.
5. Перемежающийся S6 – режим, при котором работа двигателя под нагрузкой, периодически заменяется работой на холостом ходу. Большинство двигателей, работающих в продолжительном режиме, имеют меняющийся график нагрузки.
При этом для обоснованного выбора двигателя с целью оптимального его использования рекомендуется применять методы эквивалентных величин.
Класс энергоэффективности
В настоящее время вопросам энергоэффективности уделяется огромное внимание. При этом под энергоэффективностью понимается рациональное использование энергетических ресурсов, с помощью которого достигается уменьшение потребления энергии при том же уровне мощности нагрузки. Основным показателем энергоэффективности двигателя является его коэффициент полезного действия
где Р2 – полезная мощность на валу, Р1 – потребляемая активная мощность из сети.
Стандартом IEC 60034-30 для асинхронных электродвигателей с короткозамкнутым ротором были установлены три класса энергоэффективности: IE1, IE2, IE3.
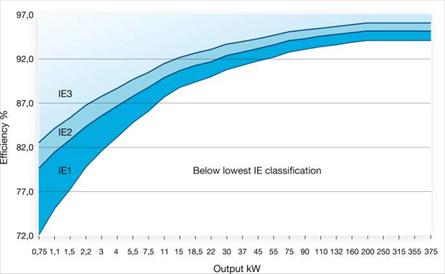
Рис. 1. Классы энергоэффективности
Так, например, использование двигателя мощностью 55 кВт повышенного класса энергоэффективности позволяет сэкономить около 8000 кВт в год от одного двигателя.
Степень защиты IP, виды климатических условий и категорий размещения
ГОСТ Р МЭК 60034-5 – 2007 устанавливает классификацию степеней защиты, обеспечиваемых оболочками машин.
Обозначение степени защиты состоит из букв латинского алфавита IP и последующих двух цифр (например, IP55).
Большинство электродвигателей, выпускаемых в настоящее время, имеют степени защиты IP54 и IP55.
Категория размещения обозначается цифрой: 1 – на открытом воздухе; 2 – под навесом при отсутствии прямого солнечного воздействия и атмосферных осадков; 3 – в закрытых помещениях без искусственного регулирования климатических условий; 4 – в закрытых помещениях с искусственно регулируемыми климатическими условиями.
Климатические условия: У – умеренный климат; УХЛ – умеренно холодный климат; ХЛ – холодный климат; Т – тропический климат.
Таким образом, при выборе электродвигателя необходимо учитывать условия окружающей среды (температура, влажность), а также необходимость защиты двигателя от воздействия инородных предметов и воды.
Например, использование электродвигателя с типом климатического исполнения и категорией размещения У3 на открытом воздухе является недопустимым.
Усилия, действующие на вал двигателя со стороны нагрузки
Наиболее нагруженными в двигателе являются подшипниковые узлы. Поэтому при выборе двигателя должны быть учтены радиальные и осевые усилия, действующие на рабочий конец вала двигателя со стороны нагрузки. Превышения допустимых значений сил приводит к ускоренному выходу из строя не только подшипников, но и всего двигателя (например, задевание ротора о статор).
Обычно допустимые значения сил для каждого подшипника приведены в каталогах. Рекомендуется в случае повышенных радиальных усилий (ременная передача) на рабочий конец вала установить роликовый подшипник, при этом предпочтительным является двигатель с чугунными подшипниковыми щитами.
Особенности конструкции двигателя при работе от преобразователя частоты
В настоящее время все большее распространение приобретает использование частотно-регулируемого привода (ЧРП), выполненного на основе асинхронного электродвигателя с короткозамкнутым ротором.
При использовании частотно-регулируемого привода достигается:
- 1. экономия электроэнергии;
- 2. плавность пуска и снижение пусковых токов;
- 3. увеличение срока службы двигателя.
В общем случае стандартный электродвигатель нельзя использовать в составе частотно-регулируемого привода, так как при уменьшении скорости вращения снижается эффективность охлаждения. При регулировании скорости вверх от номинальной резко увеличивается нагрузка от собственного вентилятора. В обоих случаях уменьшается нагрузочная способность двигателя. Кроме того, в случае использования двигателя в системах точного регулирования необходим датчик положения ротора двигателя.
При работе электродвигателя от преобразователя частоты в контуре вал – фундаментная плита могут протекать токи. При этом возникает точечная эрозия на шариках и роликах, на беговых кольцах подшипников качения, а также на баббитовой поверхности подшипников скольжения. От электролиза смазка чернеет, подшипники греются. Для разрыва контура прохождения подшипниковых токов на неприводной конец вала устанавливается изолированный подшипник. При этом по условиям безопасности установка изолированных подшипников с двух сторон двигателя не допустима.
Величина подшипниковых токов становится опасной для безаварийной работы двигателя при напряжении между противоположными концами вала более 0,5 В. Поэтому установка изолированного подшипника обычно требуется для электродвигателей с высотой оси вращения более 280 мм.
Примечание
Необходимо отметить, что в случае отклонения условий эксплуатации двигателя (например, температуры окружающей среды или высоты над уровнем моря), мощность нагрузки должна быть изменена. Кроме того, при снижении мощности нагрузки в определенные моменты времени для рационального использования двигателя может быть изменена схема соединения обмотки, а, следовательно, и фазное напряжение.
Далее приведены рекомендации по выбору электродвигателя (последовательность, в которой они представлены, не является обязательной).
На первом этапе необходимо определиться с типом электрического двигателя. Ниже даны краткое описание, преимущества и недостатки, сферы предпочтительного применения основных типов двигателей.
Типы электрических двигателей
Двигатели постоянного тока
Основным преимуществом данных двигателей, которое определяло повсеместное их использование на этапе развития электрических приводов, является легкость плавного регулирования скорости в широких пределах. Поэтому с развитием полупроводниковой промышленности и появлением относительно недорогих преобразователей частоты процент их использования постоянно уменьшается. Там, где это возможно двигатели постоянного тока заменяются приводами на основе асинхронных двигателей с короткозамкнутым ротором.
Основные недостатки двигателя постоянного тока (невысокая надежность, сложность обслуживания и эксплуатации) обусловлены наличием коллекторного узла. Кроме того, для питания двигателя необходим источник постоянного тока или тиристорный преобразователь переменного напряжения в постоянное. При всех своих недостатках двигатели постоянного тока обладают высоким пусковым моментом и большой перегрузочной способностью. Что определило их использование в металлургической промышленности, станкостроении и на электротранспорте.
Синхронные двигатели
Основным преимуществом данных двигателей является то, что они могут работать с коэффициентом мощности cosφ=1, а в режиме перевозбуждения даже отдавать реактивную мощность в сеть, что благоприятно сказывается на характеристиках сети: увеличивается ее коэффициент мощности, уменьшаются потери и падение напряжения. Кроме того, синхронные двигатели устойчивы к колебаниям сети. Максимальный момент синхронного двигателя пропорционален напряжению, при этом момент асинхронного двигателя пропорционален квадрату напряжения. Следовательно, при снижении напряжения синхронный двигатель сохраняет большую перегрузочную способность, а возможность форсировки возбуждения увеличивает надежность их работы при аварийных понижениях напряжения. Больший воздушный зазор по сравнению с асинхронным двигателем и применение постоянных магнитов делает КПД синхронных двигателей выше. Их особенностью также является постоянство скорости вращения при изменении момента нагрузки на валу.
При всех достоинствах синхронного двигателя основными недостатками, ограничивающими их применение являются сложность конструкции, наличие возбудителя, высокая цена, сложность пуска. Поэтому синхронные двигатели преимущественно используются при мощностях свыше 100 кВт.
Основное применение – насосы, компрессоры, вентиляторы, двигатель-генераторные установки.
Асинхронные двигатели
По конструктивному принципу асинхронные двигатели подразделяются на двигатели с короткозамкнутым и фазным ротором. При этом большинство используемых электродвигателей являются асинхронными с короткозамкнутым ротором. Столь широкое применение обусловлено простотой их конструкции, обслуживания и эксплуатации, высокой надежностью, относительно низкой стоимостью. Недостатками таких двигателей являются большой пусковой ток, относительно малый пусковой момент, чувствительность к изменениям параметров сети, а для плавного регулирования скорости необходим преобразователь частоты. Кроме того, асинхронные двигатели потребляют реактивную мощность из сети. Предел применения асинхронных электродвигателей с короткозамкнутым ротором определяется мощностью системы электроснабжения конкретного предприятия, так как большие пусковые токи при малой мощности системы создают большие понижения напряжения.
Использование асинхронных двигателей с фазным ротором помогает снизить пусковой ток и существенно увеличить пусковой момент, благодаря введению в цепь ротора пусковых реостатов. Однако, ввиду усложнения их конструкции, и как следствие, увеличения стоимости их применение ограничено. Основное применение – приводы механизмов с особо тяжелыми условиями пуска. Для уменьшения пусковых токов асинхронного двигателя с короткозамкнутым ротором может быть использовано устройство плавного пуска или преобразователь частоты.
В системах, где необходимо ступенчатое изменение скорости (например, лифты) используют многоскоростные асинхронные двигатели. В механизмах, требующих остановки за определенное время и фиксации вала при исчезновении напряжения питания, применяются асинхронные двигатели с электромагнитным тормозом (металлообрабатывающие станки, лебедки). Существуют также асинхронные двигатели с повышенным скольжением, которые предназначены для работы в повторно-кратковременных режимах, а также режимах с пульсирующей нагрузкой.
После того, как определен тип электродвигателя, полностью учитывающий специфику рабочего механизма и условия работы, необходимо определиться с рабочими параметрами двигателя: мощностью, номинальным и пусковым моментами, номинальными напряжением и током, режимом работы, коэффициентом мощности, классом энергоэффективности.
Мощность и моменты
В общем случае для квалифицированного подбора электродвигателя должна быть известна нагрузочная диаграмма механизма. Однако, в случае постоянной или слабо меняющейся нагрузки без регулирования скорости достаточно рассчитать требуемую мощность по теоретическим или эмпирическим формулам, зная рабочие параметры нагрузки. Ниже приведены формулы для расчета мощности двигателя P2 [кВт] некоторых механизмов.
где Q [м 3 /с] – производительность вентилятора,
Н [Па] – давление на выходе вентилятора,
ηвент, ηпер – КПД вентилятора и передаточного механизма соответственно,
где Q [м 3 /с] – производительность насоса,
g=9,8 м/с 2 – ускорение свободного падения,
H [м] – расчетная высота подъема,
ρ [кг/м 3 ] – плотность перекачиваемой жидкости,
ηнас, ηпер – КПД насоса и передаточного механизма соответственно,
где Q [м 3 /с] – производительность компрессора,
А [Дж/м 3 ] – работа изотермического и адиабатического сжатия атмосферного воздуха объемом 1 м 3 давлением 1,1·10 5 Па до требуемого давления,
ηкомпр, ηпер – КПД компрессора и передаточного механизма соответственно,
Кроме того, необходимо сопоставить пусковой момент двигателя (особенно в случае асинхронного с короткозамкнутым ротором) и рабочего механизма, так как некоторые механизмы имеют повышенное сопротивление в момент трогания. Следует иметь в виду и то обстоятельство, что при замене трехфазного асинхронного двигателя на однофазный пусковой момент последнего почти в три раза меньше и механизм, успешно функционировавший ранее, может не тронуться с места.
Развиваемый электродвигателем момент M [Нм] и полезная мощность на валу Р2 [кВт] связаны следующим соотношением
Полная мощность, потребляемая из сети:
для двигателей постоянного тока (она же активная)
для двигателей переменного тока
при этом потребляемые активная и реактивная мощности соответственно
В случае синхронного двигателя значение Q1 может получиться отрицательным, это означает, что двигатель отдает реактивную мощность в сеть.
Важно отметить следующее. Не следует выбирать двигатель с большим запасом по мощности, так как это приведет к снижению его КПД, а в случае двигателя переменного тока также к снижению коэффициента мощности.
Напряжение и ток
При выборе напряжения электродвигателя необходимо учитывать возможности системы энергоснабжения предприятия. При этом нецелесообразно при больших мощностях выбирать двигатель с низким напряжением, так как это приведет к неоправданному удорожанию не только двигателя, но и питающих проводов и коммутационной аппаратуры вследствие увеличения расхода меди.
Режим работы
Нагрузка электродвигателя в процессе работы может изменяться различным образом. ГОСТом предусмотрены восемь режимов работы.
- Продолжительный S1 – режим работы при постоянной нагрузке в течение времени, за которое температура двигателя достигает установившегося значения. Мощность двигателя, работающего в данном режиме, рассчитывается исходя из потребляемой механизмом мощности. Формулы расчета мощности некоторых механизмов (насос, вентилятор, компрессор) приведены выше.
- Кратковременный S2 – режим, при котором за время включения на постоянную нагрузку температура двигателя не успевает достичь установившегося значения, а за время отключения двигатель охлаждается до температуры окружающей среды. В случае использования двигателя S1 для работы в режиме S2 необходимо проверить его только по перегрузочной способности, так как температура не успевает достичь допустимого значения.
- Повторно-кратковременный S3 – режим с периодическим отключением двигателя, при котором за время включения температура не успевает достичь установившегося значения, а за время отключения – температуры окружающей среды. Расчет мощности электродвигателя обычного исполнения для работы в режиме S3 производится по методам эквивалентных величин с учетом пауз и потерь в переходных режимах. Кроме того, двигатель необходимо проверить на допустимое число включений в час. В случае большого числа включений в час рекомендуется использовать двигатели с повышенным скольжением. Данные электродвигатели обладают повышенным сопротивлением обмотки ротора, а, следовательно, меньшими пусковыми и тормозными потерями.
- Повторно-кратковременный с частыми пусками S4 и повторно-кратковременный с частыми пусками и электрическим торможением S5. Данные режимы рассматриваются аналогично режиму S3.
- Перемежающийся S6 – режим, при котором работа двигателя под нагрузкой, периодически заменяется работой на холостом ходу. Большинство двигателей, работающих в продолжительном режиме, имеют меняющийся график нагрузки.
При этом для обоснованного выбора двигателя с целью оптимального его использования рекомендуется применять методы эквивалентных величин.
Класс энергоэффективности
В настоящее время вопросам энергоэффективности уделяется огромное внимание. При этом под энергоэффективностью понимается рациональное использование энергетических ресурсов, с помощью которого достигается уменьшение потребления энергии при том же уровне мощности нагрузки. Основным показателем энергоэффективности двигателя является его коэффициент полезного действия
где Р2 – полезная мощность на валу, Р1 – потребляемая активная мощность из сети.
Стандартом IEC 60034-30 для асинхронных электродвигателей с короткозамкнутым ротором были установлены три класса энергоэффективности: IE1, IE2, IE3.

Рис. 1. Классы энергоэффективности
Так, например, использование двигателя мощностью 55 кВт повышенного класса энергоэффективности позволяет сэкономить около 8000 кВт в год от одного двигателя.
Степень защиты IP, виды климатических условий и категорий размещения
ГОСТ Р МЭК 60034-5 – 2007 устанавливает классификацию степеней защиты, обеспечиваемых оболочками машин.
Обозначение степени защиты состоит из букв латинского алфавита IP и последующих двух цифр (например, IP55).
Большинство электродвигателей, выпускаемых в настоящее время, имеют степени защиты IP54 и IP55.
Категория размещения обозначается цифрой:
1 – на открытом воздухе;
2 – под навесом при отсутствии прямого солнечного воздействия и атмосферных осадков;
3 – в закрытых помещениях без искусственного регулирования климатических условий;
4 – в закрытых помещениях с искусственно регулируемыми климатическими условиями.
Климатические условия:
У – умеренный климат;
УХЛ – умеренно холодный климат;
ХЛ – холодный климат;
Т – тропический климат.
Таким образом, при выборе электродвигателя необходимо учитывать условия окружающей среды (температура, влажность), а также необходимость защиты двигателя от воздействия инородных предметов и воды.
Например, использование электродвигателя с типом климатического исполнения и категорией размещения У3 на открытом воздухе является недопустимым.
Усилия, действующие на вал двигателя со стороны нагрузки
Наиболее нагруженными в двигателе являются подшипниковые узлы. Поэтому при выборе двигателя должны быть учтены радиальные и осевые усилия, действующие на рабочий конец вала двигателя со стороны нагрузки. Превышения допустимых значений сил приводит к ускоренному выходу из строя не только подшипников, но и всего двигателя (например, задевание ротора о статор).
Обычно допустимые значения сил для каждого подшипника приведены в каталогах. Рекомендуется в случае повышенных радиальных усилий (ременная передача) на рабочий конец вала установить роликовый подшипник, при этом предпочтительным является двигатель с чугунными подшипниковыми щитами.
Особенности конструкции двигателя при работе от преобразователя частоты
В настоящее время все большее распространение приобретает использование частотно-регулируемого привода (ЧРП), выполненного на основе асинхронного электродвигателя с короткозамкнутым ротором.
При использовании частотно-регулируемого привода достигается:
1. экономия электроэнергии;
2. плавность пуска и снижение пусковых токов;
3. увеличение срока службы двигателя.
В общем случае стандартный электродвигатель нельзя использовать в составе частотно-регулируемого привода, так как при уменьшении скорости вращения снижается эффективность охлаждения. При регулировании скорости вверх от номинальной резко увеличивается нагрузка от собственного вентилятора. В обоих случаях уменьшается нагрузочная способность двигателя. Кроме того, в случае использования двигателя в системах точного регулирования необходим датчик положения ротора двигателя.
При работе электродвигателя от преобразователя частоты в контуре вал – фундаментная плита могут протекать токи. При этом возникает точечная эрозия на шариках и роликах, на беговых кольцах подшипников качения, а также на баббитовой поверхности подшипников скольжения. От электролиза смазка чернеет, подшипники греются. Для разрыва контура прохождения подшипниковых токов на неприводной конец вала устанавливается изолированный подшипник. При этом по условиям безопасности установка изолированных подшипников с двух сторон двигателя не допустима.
Величина подшипниковых токов становится опасной для безаварийной работы двигателя при напряжении между противоположными концами вала более 0,5 В. Поэтому установка изолированного подшипника обычно требуется для электродвигателей с высотой оси вращения более 280 мм.
Примечание
Необходимо отметить, что в случае отклонения условий эксплуатации двигателя (например, температуры окружающей среды или высоты над уровнем моря), мощность нагрузки должна быть изменена. Кроме того, при снижении мощности нагрузки в определенные моменты времени для рационального использования двигателя может быть изменена схема соединения обмотки, а, следовательно, и фазное напряжение.
Читайте также: