
Лазерные навигационные системы кратко
Обновлено: 08.07.2024
Инерциальная опорная система (IRS) состоит из:
2 инерционных блоков отсчета (IRU);
инерциальной системы индикации (IRSDU);
устройства режима выбора единиц измерения (MSU);
главного предупредительный светового сигнал (MCU);
2 цифровых или аналоговых адаптеров (DAA);
2 радиомагнитных индикаторов (RDDMI).
IRS предоставляет инерциальные навигационные данные и инерциальные данные управления полетом другим системам.
Основная функция каждого IRU — вычислить линейное ускорение и угловую скорость поворота относительно осей тангажа, крена и рыскания самолета. Эти данные используются для отображения тангажа и крена, а также для навигационных вычислений.
Каждый IRU содержит три лазерных гироскопа и три акселерометра. Они считывают угловые скорости и линейные ускорения соответственно. Полученные данные преобразуются в локальные вертикальные координаты и объединяются с входнящими данными о воздухе для вычисления следующих параметров:
положение (широта, долгота),
ориентация (тангаж, крен, рыскание),
истинный и гиромагнитный курс,
скорость и направление ветра,
данные по угловой скорости,
Исходящие данные IRS отображаются на дисплее бортовой приборной панели и на дисплее блока управления компьютерной системой управления полетом (FMCS-CDU). Предварительно выбранные параметры также отображаются на блоке инерциальной системы идентификации (ISDU).
Эксплуатация IRS
IRS обеспечивает базовую привязку курса и ориентации, основываясь на вычислениях с помощью акселерометра и лазерного гироскопа. Используются три акселерометра и три лазерных гироскопа. Акселерометры и лазерные гироскопы бесплатформенного типа расположены в инерциальных опорных узлах таким образом, чтобы находиться вдоль каждой из трех осей самолета. Эта ориентация позволяет IRU воспринимать ускорения вдоль и вращение вокруг каждой из трех осей. Компьютерная анализирует сигналы от всех шести датчиков и определяет основные опорные сигналы курса, информацию о текущем положении, ускорении, скорости движения, угле дрейфа и скорости ориентации. Для правильной работы IRS должна быть выровнена. Выравнивание IRS включает определение местной вертикали и начального курса.
Выравнивание IRS состоит из определения местной вертикали и начального курса. Для выравнивания используются входы акселерометра и лазерного гироскопа. Расчеты выравнивания основываются на том, что единственное ускорение во время выравнивания обусловлено гравитацией Земли; единственное движение во время выравнивания обусловлено вращением Земли. Ускорение, вызванные гравитацией, всегда перпендикулярны поверхности земли и, таким образом, определяют локальную вертикаль. Эта локальная вертикаль используется для построения данных об отношении таким образом, чтобы они были точно привязаны к вертикали. Первоначально устанавливается только грубая вертикаль. После того, как вертикаль установлена, лазерный гироскоп считал скорость Земли и использовал ее для установления курса самолета. По мере того как выравнивание продолжается, вертикальная ось и курс продолжают уточняться.
Ориентация вертикальной оси отсчета положения относительно земной поверхности основана на положении самолета, вводимом в IRU. Ввод начальной позиции выполняется в любое время в течение периода выравнивания. Зондирование скорости Земли лазерными гироскопами позволяет IRU определять начальную широту. Эта определенная гироскопом широта сравнивается с введенной экипажем широтой. Введенная долгота сравнивается с последней сохраненной долготой. Для завершения периода выравнивания необходимо, чтобы показатели совпали. В течение периода выравнивания все выходные данные IRU, за исключением текущего положения, устанавливаются в значение NCD (без расчетных данных). Минимальная продолжительность режима выравнивания составляет 10 минут.
Каждый IRU содержит три акселерометра, по одному для каждой из трех осей: продольной, боковой и вертикальной. Ускорение вдоль входной оси перемещает чувствительную массу. Емкостный датчик преобразует изменение положения в электрический сигнал ошибки на сервоусилитель. Сервоусилитель обнуляет сигнал ошибки, возвращая чувствительную массу в нулевое положение с помощью дроссельной катушки. Ток в дроссельной катушке, необходимый для обнуления сигнала ошибки, является аналоговым выходным сигналом, представляющим ускорение.
Аналоговый выходной сигнал получается один раз, чтобы определить скорость и во второй раз, чтобы определить расстояние.
Датчик температуры предусмотрен для каждой оси (X, Y, Z) для повышения точности акселерометра. Каждый датчик подает сигнал, пропорциональный температуре. Этот сигнал используется IRU для компенсации и коррекции данных датчика.
Кольцевой лазерный гироскоп использует лазерный луч для измерения углового вращения. Каждый гироскоп представляет собой треугольный гелий-неоновый лазер, который производит два световых луча, один из которых движется по часовой стрелке, а другой — против. Производство световых пучков, или генерация, происходит в газоразрядной области путем ионизации смеси низкого давления гелий-неонового газа с высоким напряжением для получения тлеющего разряда. Свет, произведенный от генерации, отражается вокруг треугольника зеркалами в каждом углу треугольника, чтобы произвести лучи света по часовой стрелке и против часовой стрелки.
Длина пути вокруг полости тщательно контролируется и регулируется таким образом, чтобы она была равна интегральной длине волны лазера пиковой мощности.
Когда лазерный гироскоп находится в состоянии покоя, частоты двух противоположных движущихся лазерных лучей равны. Когда лазерный гироскоп вращается вокруг оси, перпендикулярной плоскости генерации, возникает разность частот между двумя лазерными лучами. Разность частот создается потому, что скорость света постоянна. Будет казаться, что один лазерный луч обладает большим расстоянием для перемещения, чем другой лазерный луч в завершении одного прохода вокруг полости.
Небольшое количество света от двух лазерных лучей проходит через одно из зеркал (менее 0,2%). Лучи объединяются оптическими частотами для получения частоты импульсов. Что принимает форму интерференционного узла. Эта частота импульсов аналогична двум различным звуковым частотам, которые объединяются, чтобы произвести третью разностную частоту.
Когда частоты лазерного луча различаются, создается картина из чередующихся темных и светлых полос. Фотодиоды воспринимают интерференционную картина и направление движения. Частота и относительная фаза двух диодных выходов указывают величину и направление вращения гироскопа.
При низкой частоте вращения небольшая разница частот между лазерными лучами приводит к соединению луча. Это блокирует и объединяет частоты на одном ложном значении. Чтобы компенсировать этот эффект, используется электрогидродвигатель для вибрации лазерного блока через область блокировки. Вибрация имеет чистое нулевое среднее значение. Она не производит никакого чистого инерционного вращения. Вибрация двигателя ощущается на корпусе IRU и создает слышимый гул.
Блок выбора режима IRS (MSU)
Блок выбора режима (MSU) обеспечивает выбор режима для двух IRU через два переключателя выбора режима и контролирует работу IRU через два набора сигнальных огней, установленных на блоке.
MSU установлен на кормовой верхней панели в кабине управления полетом. MSU монтируется четырьмя крепежными элементами DZUS и связан с проводкой самолета через два задних разъема.
Когда переключатели выбора режима находятся в выключенном состоянии, питание с IRU снимается.
Каждый переключатель выбора режима фиксируются. Фиксация предотвращают случайное перемещение. Чтобы переключить режим, нужно освободить переключатель от фиксатора.
Аварийные сигналы постоянного тока загораются, когда мощность батареи самолета недостаточна для поддержания работы IRU.
Сигнал неисправности загорается, когда в IRU в ненормальном состояние.
Сигналы можно проверить, нажав на каждый переключатель освещения, активировав цепь проверки яркости/затемнения или начав проверку IRU.
Блок индикации инерциальной опорной системы (ISDU)
Инерциальный блок опорной системы индикации (ISDU) обеспечивает интерфейс IRU для пилота. ISDU позволяет вводить данные инициализации для IRU. На дисплее отображаются значения путевого угла, земной скорости, настоящего положения, направления и скорости ветра, курса и состояния системы. ISDU расположен на кормовой верхней панели, P5. Устройство весит четыре фунта (1,8 кг) и связано с самолетной проводкой через два задних разъема.
Передняя панель ISDU содержит два набора из семи сегментированных дисплеев. На левой стороне панели расположен двухпозиционный дисплей ( SYS DSPL) переключатель и пять дисплеев (DSPL SEL) выбора. На правой стороне панели находится набор из двенадцати клавиш, называемых клавиатурой.
Переключатель SYS DSPL представляет собой двухпозиционный переключатель выбора левого или правого IRU. ISDU может только инициализировать или получать данные от IRU, который был выбран на коммутаторе SYS DSPL.
Переключатель DSPL SEL выбирает тип данных, которые будут отображаться на цифровых дисплеях ISDU. IRU, выбранный на коммутаторе SYS DSPL, предоставляет данные. Пять позиций переключателя и данные, отображаемые для каждой позиции, выглядят следующим образом:
TK/GS (Track Angle/Ground Speed) - истинный путевой угол от 0 до 359,9 градусов отображается на левом дисплее с разрешением 0,1 градуса. Скорость движения по земле от 0 до 2000 узлов отображается на правом дисплее с разрешением 1 узел.
PPOS (нынешнее положение) - широта от 90°S до 90°N отображается на левом дисплее, а долгота от 180°E до 180°W отображается на правом дисплее. Разрешение составляет 0,1 минуты. Дисплей используется при вводе текущего положения во время инициализации двух IRU или при мониторинге текущего положения от IRU во время полета.
Ветер (скорость и направление ветра) - скорость ветра от 0 до 256 узлов отображается на правом дисплее с разрешением 1 узел. Направление ветра от 0 до 359 градусов отображается на левом дисплее с разрешением 1 градус. Когда самолет находится на земле, дисплей скорости ветра покажет 100 узлов.
HDG/STS (курс/статус) - истинный курс от 0 до 359,9 градусов отображается на левом дисплее с разрешением 0,1 градуса. Состояние выравнивания отображается в левой части правого дисплея и представляет собой обратный отсчет последних 7 минут цикла выравнивания. Коды неисправностей (M/C) отображаются в правой части правого дисплея.
Регулятор управления яркостью совпадает с переключателем DSPL SEL и является потенциометром для управления яркостью дисплеев.
На ISDU есть два цифровых дисплея. Когда ISDU получает данные IRU, переключатель DSPL SEL определяет данные на дисплее. Когда клавиатура ISDU используется для инициализации IRU, данные, введенные на клавиатуре, отображаются на двух дисплеях. Если данные IRU неправильны оба дисплея гаснут. Регулятор яркости для дисплеев расположен внутри переключателя DSPL SEL.
Клавиатура состоит из двенадцати освещенных клавиш. Чтобы перевести цифровой дисплей из режима приема IRU в режим отображения клавиатуры, сначала необходимо нажать одну из следующих клавиш: N(2), W(4), H(5), E(6) или S (8). Любое другое нажатие не работает.
N(2), W(4), E(6) или S(8) при первом нажатии вызывают появление N или W на левом дисплее или E или S на правом дисплее. Они представляют север, запад, восток и юг и используются для инициализации IRU при вводе долготы и широты. Теперь можно вставлять цифровые данные, которые будут соответствующим образом отображаться на числовом дисплее (только в режиме выравнивания).
Клавиши с буквами и цифрами, отображаются, когда вызваны клавишами изначально.
При нажатии клавиши N, S, E, W или H индикатор ENT загорается и продолжает гореть, пока вводятся цифры. Когда клавиша ENT нажата, ENT гаснет и выполняется проверка правильности данных. При необходимости данные передаются в IRU, и на дисплее отображаются выбранные параметры.
Если данные являются необоснованными, то загорается CLR, и на дисплее отображается запись. Нажатие клавиши CLR приводит к тому, что CLR гаснет, а ISDU отображает выбранные параметры.
ISDU питается от IRU, от 28 вольт постоянного тока. Два источника питания подключены параллельно к фильтру, который подает постоянный ток для работы устройства. Для питания устройства достаточно одного источника постоянного тока на 28 вольт.
Обе IRU предоставляют данные в ISDU в формате ARINC 429. Переключатель выбора системы выбирает одну из шин и передает ее процессору, который постоянно обновляет сохраненную информацию с выбранной шины. Кроме того, процессор воспринимает данные, вводимые пилотом во время выравнивания или в режиме ориентации. При подаче информации через клавиши от пилота процессор функционирует как передатчик, поставляя информацию ARINC 429 к IRU. Когда клавиши ENT или CLR нажаты, процессор функционирует как приемник.
Схема отображения состоит из блока логической идентификации данных, драйверов, декодеров и 13 блоков отображения. Блок логической идентификации воспринимает положение селектора дисплея, декодера и управляет затемнением и освещением дисплея по сегментам.
Инерциальный навигационный блок (IRU)
Инерциальный блок (IRU) определяет ориентацию, ускорение, угловые скорости, скорость, истинный и гиромагнитный курс, данные о местоположении, абсолютную высоту и данные о ветре. Сигналы производятся тремя лазерными гироскопами и тремя акселерометрами, установленными на самолете. Сигналы передаются в другие системы, включая компьютерную систему управления полетом, цифровую систему управления полетом, систему электронных приборов управления полетом, автоответчик, VHF-навигационную систему и приборную панель в кабине пилота.
У IRU два источника питания, один источник переменного тока 115 вольт и один источник постоянного тока 28 вольт. Любой источник достаточен для работы, но оба необходимы для начального запуска.
Все входящие данные IRU направляются в вычислительную схему. Источник данных выводит их на интерфейс ARINC 429. Данные инициализации поступают либо с компьютера управления полетом, либо с ISDU.
Программное обеспечение выполняет все вычисления, включая компенсации, навигационные вычисления и преобразования координат. Выходы гироскопа и акселерометра компенсируют смещение датчика, масштабный коэффициент, рассогласование и тепловые изменения. Компенсированные сигналы используются при вычислении тангажа, крена и курса самолета относительно локальных навигационных координат.
Три идентичные шины данных ARINC 429 предоставляют цифровые данные для систем управления полетом, автоматического освещения и управления полетом. К MSU применяется статус дискретного.
Самолеты с IRU-109 и предшествующими системами: встроенные цепи испытательного оборудования (BITE) изолируют неисправности до уровня LRU. Неисправности обозначаются желтым индикатором на панели IRU, желтым светом на MSU ошибка выводится на пользовательские системы. Пользовательские системы могут регистрировать неисправность в полете на основании неисправности, полученной от IRU. Кроме того, информация о состоянии хранятся в энергонезависимой памяти МСАТ, по крайней мере, на протяжении предыдущих девяти рейсов. Содержимое энергонезависимой памяти может быть извлечено на землю для обслуживания.
H. самолеты с IRU -110 и последующими; встроенные цепи испытательного оборудования (BITE) изолируют неисправности до уровня LRU. Неисправности обозначаются желтым светом неисправности на МСУ и битом состояния на шинах данных для пользовательских систем. Пользовательские системы могут регистрировать неисправность в полете на основании неисправности, полученной от IRU. Кроме того, информация о состоянии хранится в энергонезависимой памяти IRU, по крайней мере, на протяжении девяти рейсов. Содержимое энергонезависимой памяти можно извлечь на земле для обслуживания.
Параметры непрерывно контролируемые BITE включают работу лазера гироскопа, акселерометра и электропитания, деятельность компьютера и памяти, температуру. При первоначальном включении IRU проверяется питание аккумулятора. Индикация включения постоянного тока отображается во время проверки батареи.

В автономном полете
Первые пилоты в движении ориентировались по солнцу, звездам или компасу, затем появились радиосигналы, но все эти способы зависели от внешних факторов, а значит, не были полностью надежными. Требовался навигационный прибор, анализирующий движение самолета и не использующий внешние источники информации. Все необходимое оборудование должно быть размещено на борту самолета, а система должна функционировать полностью автономно.
![UTK_1221.jpg]()
Бесплатформенная навигационная система БИНС-СП-1
Такой метод теоретически был разработан в 1930-е годы, но реализовать его удалось только спустя 20 лет. Инерциальная навигация основывается на применении законов механики, в частности на теории устойчивости механических систем, которую разрабатывали русские математики А.М. Ляпунов и А.В. Михайлов. Первые инерциальные навигационные системы (ИНС) были созданы в 1950-е годы в США и СССР. Они были довольно громоздкими и могли занимать все свободное пространство самолета. Современные ИНС изготавливаются с применением микроэлектронных технологий и занимают гораздо меньше места.
ИНС могут решать различные задачи. Это и общая географическая ориентировка, и определение местонахождения относительно заданной траектории или цели, и наведение на движущуюся цель.
Устройство инерциальной системы
Основа работы ИНС заключается в измерении ускорений летательного аппарата и его угловых скоростей относительно трех осей самолета для того, чтобы исходя из этих данных определить местоположение самолета, его скорость, курс и другие параметры. По результатам анализа объект стабилизируется, и может использоваться автоматическое управление.
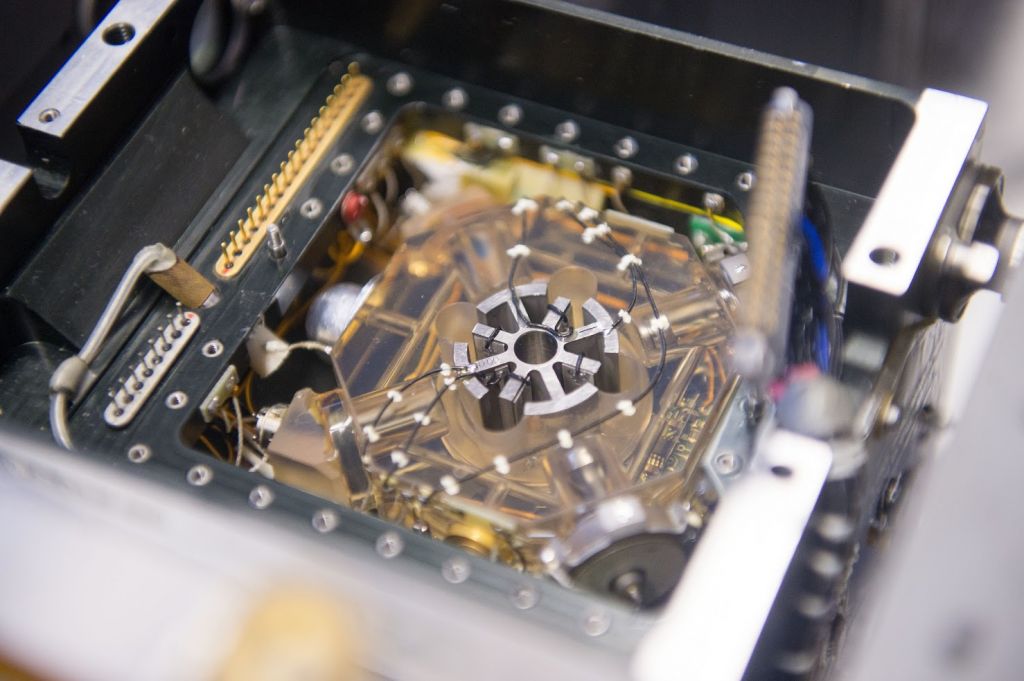
![IROD4650.jpg]()
Лазерный гироскоп
Для сбора информации о полете в состав ИНС включаются акселерометры, считывающие линейное ускорение, и гироскопы, позволяющие определить углы наклона самолета относительно основных осей: тангаж, рысканье и крен. Точность полученной информации зависит от характеристик этих приборов. Анализом данных занимается компьютер, который затем по определенным навигационным алгоритмам корректирует движение объекта.
ИНС делятся на платформенные и бесплатформенные. Основой для платформенных ИНС служит гиростабилизированная платформа. В бесплатформенных системах акселерометры и гироскопы жестко связаны с корпусом прибора. Функции платформы моделируются математически вычислительной системой. Бесплатформенные системы выгодно отличаются меньшим весом и габаритами, а также возможностью работать при значительных перегрузках.
Преимущества ИНС перед другими навигационными системами заключаются в их полной независимости от внешних источников данных, повышенной защите от помех, высокой информативности и возможности передавать информацию на большой скорости. Отсутствием какого-либо излучения при работе ИНС обеспечивается скрытность объекта, на котором она используется.
Недостатком ИНС можно назвать ошибки, которые накапливаются с течением времени в получаемой от приборов информации. Это могут быть как методические ошибки, так и ошибки, связанные с неверной начальной настройкой оборудования. Для их коррекции создаются интегрированные навигационные системы, где данные, получаемые ИНС, дополняются данными, поступающими от неавтономных систем, например спутниковой навигации. Еще одним относительным минусом ИНС является высокая стоимость входящего в их состав оборудования.
Авионика из Раменского
Инерциальные навигационные системы сегодня применяются не только в авиации. Их появление повлияло на развитие космонавтики, увеличилась дальность походов подводных лодок. ИНС используются в управлении морскими судами и баллистическими ракетами, применяются в геодезии. Также актуально применение подобных систем в беспилотных летательных аппаратах.

В 1960-е годы первые в СССР инерциальные навигационные системы для авиации были разработаны Раменским приборостроительным конструкторским бюро (РПКБ). Начиная с 1958 года специалистами РПКБ проводилось эскизное проектирование ИНС для различных классов и типов летательных аппаратов. Совершенствование чувствительных элементов – разработка поплавковых гироскопов и акселерометров, а затем динамически настраиваемых гироскопов – и применение цифровой вычислительной техники обеспечили создание и широкое применение ИНС.
Первые приборы для прокладки курса появились в Древнем Китае за 2600 лет до н.э., а к XXI веку были разработаны различные виды навигационных систем: радиолокационная, спутниковая, инерциальная и другие. На их развитие повлияли как соперничество между странами в сфере военных технологий, так и технологический прогресс в целом.
Сначала на смену ориентированию по солнцу, звездам и наземным объектам пришла навигация по радиомаякам. Маяки передавали опознавательный сигнал на определенной частоте, оборудование на борту самолета принимало этот сигнал и засекало направление. Зная азимуты двух таких маяков, можно было вычислить курс.
Но маяков требовалось много. Их сигнал могли запеленговать и заглушить, а сами маяки — уничтожить, поэтому вопрос создания системы навигации, независимой от внешних источников информации, стоял очень остро.
С развитием ракетостроения и выводом на орбиту спутников появилась возможность использовать для привязки к местности спутниковый сигнал. В настоящее время системы навигации GPS и ГЛОНАСС позволяют определять положение объекта в пространстве с точностью до 1 метра и охватывают почти всю поверхность Земли.
К сожалению, спутниковые навигационные системы унаследовали недостаток своей предшественницы — радионавигации. Они также уязвимы к помехам, плохо работают на полюсах — как из-за особенностей позиционирования спутников на орбите, так и из-за активности ионосферы в этих широтах. Средства радиоэлектронной борьбы (РЭБ) могут исказить спутниковый сигнал и привести к сбою в работе навигационной аппаратуры.
Поэтому очевидно, что спутниковые системы, какими бы совершенными и точными они ни были, необходимо дублировать оборудованием, устойчивым к помехам и независимым от внешних источников информации. И нерциальные навигационные системы (ИНС), разработка которых началась во второй половине XX века, полностью отвечали этим требованиям.
Принцип работы инерциальной навигационной системы
Инерциальная навигация основана на непрерывном измерении параметров движения — ускорения и угловых скоростей — относительно установленной системы отсчета (СО). В качестве таковой могут выступать:
- произвольная СО;
- астрономические объекты (звезды);
- Земля;
- горизонт.
Для определения параметров движения используются специальные датчики: акселерометры для определения линейного ускорения и гироскопы для вычисления угловых скоростей. Поступившие с них данные обрабатываются вычислительной системой.
Схематично изобразить работу ИНС можно следующим образом:
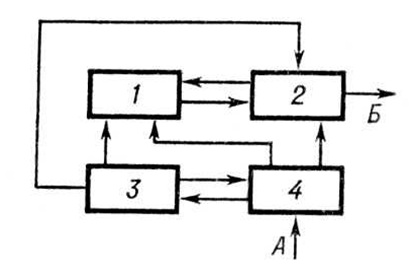
Схема работы ИНС: 1 — блок измерений; 2 — вычислительный блок; 3 — блок времени; 4 — блок ввода начальной информации; А — ввод первоначальной информации; Б — вывод данных о координатах. Источник: Большая Советская Энциклопедия
Основное уравнение для вычисления координат имеет вид:


Вычисления осуществляются по следующему алгоритму:
- В блок 4 через вход А загружаются начальные данные для калибровки навигационной системы и ориентации инерционных датчиков.
- Данные поступают в блоки 1, 2, 3.
- В блоке 3 осуществляется синхронизация с мировым временем, данные о котором поступают в блоки 1, 2 и 4.
- Блок 1 регистрирует данные об ускорении.
- В блоке 2 происходит интегрирование уравнения (1): однократное — для определения скорости, двукратное — для определения координат.
- Через выход Б осуществляется вывод информации о местоположении на местности.
Варианты исполнения инерциальных навигационных систем
Существует два варианта исполнения ИНС: платформенный и бесплатформенный. В первом случае датчики размещаются на гиростабилизированной платформе, во втором — жестко связаны с корпусом прибора.
Платформенные инерциальные навигационные системы бывают трех видов:
- геометрического;
- аналитического;
- полуаналитического.
В ПИНС геометрического типа гироскопы и акселерометры размещаются на отдельных гиростабилизированных платформах. Платформа с акселерометрами стабилизирована относительно горизонта, с гироскопами — в инерциальном пространстве (относительно далеких космических объектов). Определение координат осуществляется посредством анализа данных о взаимном расположении платформ.
В ПИНС аналитического типа датчики размещаются на одной платформе, стабилизированной в инерциальном пространстве. Координаты вычисляются по изменению положения аппарата относительно гироскопов и акселерометров.
В ПИНС полуаналитического типа платформа с датчиками стабилизирована относительно местного горизонта, а данные обрабатываются на вычислителе, расположенном вне ее.
Вариант исполнения платформенной ИНС необходимо подбирать под выполняемые летательным аппаратом задачи. Например, геометрические ПИНС имеют высокую погрешность при работе на скоростных военных самолетах и в космическом пространстве, поэтому их, как правило, устанавливали на гражданские самолеты, надводные корабли, подводные лодки, а также на тихоходные военно-транспортные самолеты и стратегические бомбардировщики. Для работы же в космическом пространстве и на истребителях использовали аналитические ПИНС.
ПИНС обладают тремя важными достоинствами:
- высокая точность измерений;
- нет нужды в пересчете из связанной системы координат в необходимую;
- высокая точность предстартовой подготовки.
Однако громоздкость исполнения, высокая стоимость и ограничения в измерении углов привели к практически полному переходу на бесплатформенные инерциальные навигационные системы (БИНС).
Бесплатформенные инерциальные навигационные системы
В последние годы беспилотные летательные аппараты (БПЛА) выполняют широкий спектр задач: от доставки грузов до аэрофотосъемки, разведки и мониторинга. Для увеличения их эффективности возникла необходимость в уменьшении массогабаритных характеристик устанавливаемых на борту приборов, в том числе и навигационной системы.
БИНС отвечают этим требованиям, но обладают невысокой точностью и склонностью к накоплению ошибки. Согласно Каперко ( Каперко А. Ф., Легостаев В. Л. Классификация элементов программно-технического комплекса бесплатформенной инерциальной навигационной системы), БИНС разделяются на три класса точности, параметры которых приведены в таблице 1.
Таблица 1. Классы точности БИНС.
| Точность определения угла крена, тангажа, град/ч | Скорость накопления ошибки, м/с |
| Низкая точность | 0,5 — 1 |
| Средняя точность | 0,1 — 0,5 |
| Высокая точность | 0,01 — 0,1 |
Для гражданских квадрокоптеров достаточно систем с низкой точностью, для аппаратов крупнее, а также для решения задач навигации и ориентации используют системы средней и высокой точности.
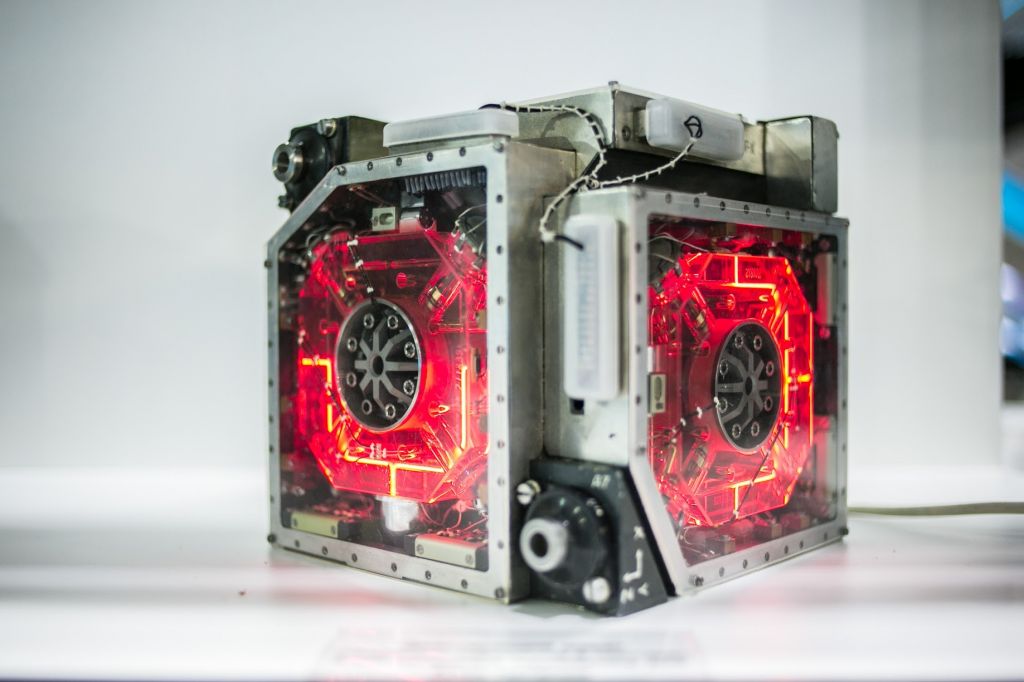
Производство датчиков БИНС по технологиям для интегральных плат позволило создать так называемые MEMS -устройства: микроэлектромеханические системы. Это сразу же вывело навигационное оборудование на новый уровень по надежности и компактности, хотя для более точных навигационных приборов продолжают использовать волоконно-оптические и лазерные гироскопы.

Пример MEMS-датчика
Помимо надежности и компактности у БИНС есть еще ряд важных преимуществ:
- неограниченные углы измерения;
- информативность;
- устойчивость к вибрациям и ударам;
- низкое энергопотребление.
Благодаря этим факторам БИНС, в том числе и на базе МЭМС-датчиков, заняли на рынке очень прочное положение, но полностью другие способы навигации не вытеснили. Причинами послужили постоянно накапливающаяся погрешность и необходимость тщательной предполетной калибровки.
Методы компенсации недостатков БИНС
Поскольку платформенные ИНС обладают точностью, которой не хватает БИНС, то одним из самых очевидных решений будет создание гибридной системы, объединяющей в себе преимущества обоих подходов.
Если БИНС разместить на стабилизированной по двум осям платформе, используя датчики и для навигации, и для стабилизации платформы, то можно получить систему с лучшей точностью. Только она все равно получится более громоздкой, дорогой, со сложной конструкцией.
Поэтому большее распространение получили так называемые интегрированные навигационные системы, в которых ИНС объединена с другой измерительной или навигационной системой — как правило, спутниковой.
В интегрированном исполнении происходит периодический перезапуск ИНС с новыми начальными данными, полученными от спутниковой системы. При отсутствии спутникового сигнала погрешность компенсируется с помощью алгоритмов оценивания и прогнозирования.
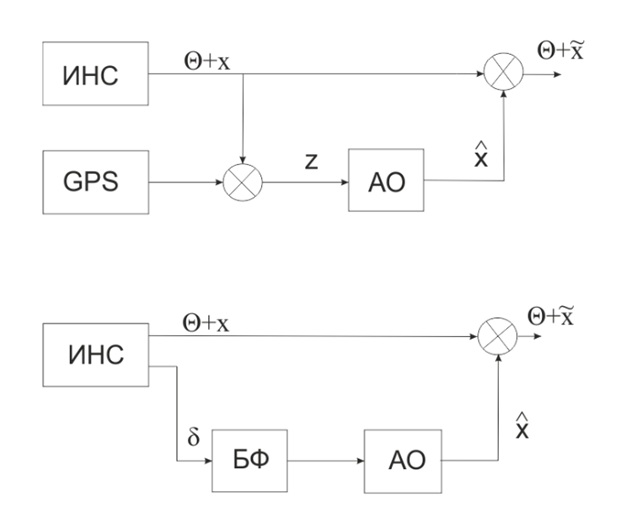
Структурная схема коррекции ИНС с использованием алгоритма оценивания. АО — алгоритм оценивания; БФ — блок формирования измерений; Θ — истинная информация о параметрах динамического объекта; х — вектор погрешностей ИНС; X ̂ — оценка вектора x; δ — сигнал с датчика угла прецессии; X ̃ — вектор ошибок оценивания
Ситуация на рынке
Рынок инерциальных навигационных систем активно развивается во всем мире. Если в XX веке они устанавливались преимущественно на военную технику, то с 90-х годов началась их активная демилитаризация.
Сейчас ИНС применяются на гражданских судах и самолетах, в геофизике, устанавливаются на БПЛА и беспилотные автомобили, используются в передвижных дорожных лабораториях и в системах стабилизации антенн. Компании предлагают как компактные решения на базе MEMS -датчиков, свободно помещающиеся на ладони, так и более габаритные, но точные устройства на базе волоконно-оптических и лазерных гироскопов.
В нашем каталоге также представлены компоненты для ИНС: MEMS-акселерометры AS-100 и MEMS-гироскопы ЛК-МЭМС-ГИРО100 . Их отличает низкое энергопотребление, миниатюрные размеры, малый температурный дрейф, устойчивость к нагрузкам и широкий диапазон рабочих температур.
Помимо комплектующих у нас представлены интегрированные навигационные системы , в том числе на базе одноосных или трехосных волоконно-оптических гироскопов. Мы предлагаем как ультра-экономные решения, так и более дорогие, но точные приборы. Подробнее можете ознакомиться с ними в каталоге .
Заключение
Современные проблемы требуют современных решений. Не стали исключением и навигационные системы. Если на заре мореплавания людям хватало простейших приборов, чтобы определить свое местоположение, то сегодня возросшие скорость и количество транспортных средств предъявляют совсем другие требования к точности навигационного оборудования.
Не меньшую роль играет обеспечение его автономности в широком диапазоне внешних условий. Инерциальные навигационные системы решают эту задачу, но при этом теряют в точности и склонны к накоплению ошибки. Ответом на этот вызов стало появление интегрированных решений, объединивших в себе достоинства обоих методов.
Дальнейшее развитие навигационных технологий будет заключаться в повышении точности датчиков и обеспечения еще большей автономности за счет совершенствования алгоритмов прогноза и оценивания.
Но уже сейчас существует широкий круг задач, для которых разработаны эффективные решения. Если вам нужна консультация по выбору навигационной системы, свяжитесь с нами по e-mail или телефону .
В автономном режиме полёта, когда по какой-либо причине прямое управление БПЛА оператором с земли невозможно, а спутниковый сигнал недоступен, особое значение приобретают инерциальные средства навигации. Принцип действия инерциальной навигации состоит в определении ускорения объекта и его угловых скоростей с помощью установленных на БПЛА приборов. По этим данным происходит вычисление координат БПЛА, его курса, скорости, пройденного расстояния. Существует ряд комплексных устройств, способных обеспечить автономную навигацию БПЛА - это прежде всего AHRS, IMU и INS. Они зачастую представляют собой т.н. безплатформенные системы, которые не имеют собственной стабилизирующей платформы и целиком привязаны к носителю. Рассмотрим более подробно каждый тип этих приборов по отдельности.
Система определения курса и пространственного положения (AHRS )
AHRS является простейшей навигационной системой, предназначенной для сверхлёгких БПЛА, радиус действия которых не превышает нескольких десятков километров. Она имеет трёхосевую структуру и как правило строится на МЭМС компонентах. AHRS состоит из гироскопов, акселерометров и магнитометров, позволяющих производить точное определение курса и местоположения БПЛА. Перед началом полёта, система производит автоматический поиск Севера для последующего точного вычисления координат БПЛА. Данные приборов обрабатываются вычислительным блоком на основе микропроцессора с помощью специальных алгоритмов компенсации нулевого смещения (обычно для этой цели используется 6-частный фильтр Калмана). Благодаря этому удаётся достичь курсовой точности в пределах 1-го градуса при разрешении измерений 0,01 градуса. При выборе AHRS так же стоит обращать внимание на следующие параметры:
- Диапазон измерения крена и тангажа. Стандартно он составляет тангаж ± 90 ° и крен± 180 °. Однако следует иметь в виду, что при тангаже более 40 ° точность измерений резко падает.
- Массогабаритные характеристики. AHRS не должна препятствовать несению БПЛА прочей полезной нагрузки, например в виде оптико-электронной системы.
- Климатические характеристики. Поскольку БПЛА часто используются в неблагоприятных погодных условиях, поэтому степень защиты корпуса AHRS должна быть не менее IР 67, а диапазон рабочих температур должен составлять от -40 до +80 °С.
- Скорость работы прибора. Так задержка пуска желательно не должна быть более 3с, частотный отклик – не менее 50Гц, а скорость передачи данных не менее 2400 бод.
- Устойчивость к перегрузкам. В идеале она должна превосходить устойчивость к перегрузкам самого БПЛА и составлять не менее 1000 g .
- Протоколы передачи данных. Чем их больше, тем лучше (тем большее количество внешних устройств может быть задействовано). Минимальный список доступных протоколов для AHRS: RS232/RS485/TTL.
Инерциальный измерительный блок (IMU )
IMU представляет собой модульную инерциальную навигационную систему, архитектура которой может быть сформирована индивидуально под конкретную задачу. Основу этих приборов обычно составляет сочетание трёхосевых акселерометра и гироскопа, к которым может быть добавлен магнитометр, барометр, температурный датчик и т.д. В результате комплектуется достаточно сложная и многофункциональная измерительная система, позволяющая выполнить полётное задание БПЛА средней дальности (в радиусе от 100км до 1000км). При выборе конкретной модели IMU нужно обращать внимание на следующие моменты:
- Элементная база на которой комплектуются приборы. Чаще всего это могут быть либо волоконно-оптические компоненты, либо МЭМС. Последние уступают в точности волоконно-оптическим системам, зато выигрывают по массогабаритным характеристикам.
- Рекомендуемая частота дискретизации должна составлять не менее 1кГц.
- Возможность интеграции с другими устройствами (главным образом с ГНСС-приёмниками, радарами и средствами визуального слежения).
- Время задержки пуска и время обновления данных. Чем более разветвлённую структуру имеет IMU , тем оно больше.
- Точностные характеристики (определение точности местоположения, курсовая точность, точность определения крена и тангажа и т.д.). Тут следует иметь в виду, что при резком снижении или взлёте значение этих характеристик может сильно колебаться.
- Широкий диапазон гироскопических измерений (не менее ± 1000 °/с) и чувствительность акселерометра (в отличие от гироскопа, тут существует обратная зависимость – чем меньше диапазон измерения, тем в данном случае лучше).
- Особенности подключения прибора, чаще всего для этой цели используются различные типы авиационных разъёмов.
Интегрированные навигационные системы (INS)
Если к IMU подключить ГНСС (Глобальную навигационную спутниковую систему), то мы получим прибор, именуемый INS , в котором данные инерциальных измерительных устройств сочетаются со спутниковыми данными с использованием специальных алгоритмов слияния информации. INS потенциально имеют более высокую точность чем просто инерциальные навигационные системы или чисто спутниковые навигаторы, по этой причине они могут использоваться в качестве бортовых навигационных систем на БПЛА большой дальности (с радиусом полёта свыше 1000км). Помимо перечисленных выше характеристик инерциальных измерительных приборов, для INS также важен правильный выбор ГНСС, которые отличаются различными параметрами:
Читайте также: