
Адаптивное управление это кратко
Обновлено: 03.07.2024
Роба́стное управле́ние — совокупность методов теории управления, целью которых является синтез такого регулятора, который обеспечивал бы хорошее качество управления (к примеру, запасы устойчивости), если объект управления отличается от расчётного или его математическая модель неизвестна. Таким образом, робастность означает малое изменение выхода замкнутой системы управления при малом изменении параметров объекта управления. Системы, обладающие свойством робастности, называются робастными (грубыми.
Объект управления — обобщающий термин кибернетики и теории автоматического управления, обозначающий устройство или динамический процесс, управление поведением которого является целью создания системы автоматического управления.
Регулятор или управляющее устройство — в теории управления устройство, которое следит за состоянием объекта управления как системы и вырабатывает для неё управляющие сигналы. Регуляторы следят за изменением некоторых параметров объекта управления (непосредственно, либо с помощью наблюдателей) и реагируют на их изменение с помощью некоторых алгоритмов управления в соответствии с заданным качеством управления.
Идентификация систем — совокупность методов для построения математических моделей динамической системы по данным наблюдений. Математическая модель в данном контексте означает математическое описание поведения какой-либо системы или процесса в частотной или временной области, к примеру, физических процессов (движение механической системы под действием силы тяжести), экономического процесса (реакция биржевых котировок на внешние возмущения) и т. п. В настоящее время эта область теории управления хорошо.
Гибридный компьютер, гибридная вычислительная машина, аналого-цифровая система — вид гибридной вычислительной системы (ГВС), сочетающий в себе свойства аналоговых и цифровых вычислительных устройств.
Пропорционально-интегрально-дифференцирующий (ПИД) регулятор — устройство в управляющем контуре с обратной связью. Используется в системах автоматического управления для формирования управляющего сигнала с целью получения необходимых точности и качества переходного процесса. ПИД-регулятор формирует управляющий сигнал, являющийся суммой трёх слагаемых, первое из которых пропорционально разности входного сигнала и сигнала обратной связи (сигнал рассогласования), второе — интеграл сигнала рассогласования.
Теория электрических цепей — совокупность наиболее общих закономерностей, описывающих процессы в электрических цепях. Теория электрических цепей основана на двух постулатах.
Цифровой фильтр — в электронике любой фильтр, обрабатывающий цифровой сигнал с целью выделения и/или подавления определённых частот этого сигнала. В отличие от цифрового, аналоговый фильтр имеет дело с аналоговым сигналом, его свойства недискретны, соответственно передаточная функция зависит от внутренних свойств составляющих его элементов.
Лине́йная систе́ма — любая система, для которой отклик системы на сумму воздействий равен сумме откликов на каждое воздействие. В математической модели линейной системы это означает, что оператор преобразования "вход-выход" линеен. Иногда линейное свойство системы называют принципом суперпозиции.
Нейроуправление (англ. Neurocontrol) — частный случай интеллектуального управления, использующий искусственные нейронные сети для решения задач управления динамическими объектами. Нейроуправление находится на стыке таких дисциплин, как искусственный интеллект, нейрофизиология, теория автоматического управления, робототехника. Нейронные сети обладают рядом уникальных свойств, которые делают их мощным инструментом для создания систем управления: способностью к обучению на примерах и обобщению данных.
Обра́тная связь в киберне́тике — это наличие схемных циклов в неизменяемой части машины, и условных инструкций в её изменяемой части. Обратная связь выделяет особый класс автоматов, которые участвуют в определённом виде научных экспериментов или применяются на практике.
Интегра́тор, блок интегри́рования — техническое устройство, выходной сигнал (выходная величина, выходной параметр) которого пропорционален интегралу, обычно по времени, от входного сигнала.
Теория автоматического управления (ТАУ) — научная дисциплина, которая изучает процессы автоматического управления объектами разной физической природы. При этом при помощи математических средств выявляются свойства систем автоматического управления и разрабатываются рекомендации по их проектированию.
Схемоте́хника — научно-техническое направление, занимающееся проектированием, созданием и отладкой (синтезом и анализом) электронных схем и устройств различного назначения.
Векторное управление является методом управления синхронными и асинхронными двигателями, не только формирующим гармонические токи (напряжения) фаз (скалярное управление), но и обеспечивающим управление магнитным потоком ротора. Первые реализации принципа векторного управления и алгоритмы повышенной точности нуждаются в применении датчиков положения (скорости) ротора.
Аналоговый фильтр — разновидность электронных, механических, или звуковых фильтров, имеющих дело с аналоговыми или непрерывными сигналами, такими как напряжение, звук или механическое движение. В отличие от них цифровые фильтры имеют дело с дискретными сигналами.
Винеровское оценивание — задача нахождения импульсной характеристики линейной стационарной системы, дающей на выходе оптимальную в смысле минимума математического ожидания средней квадратической ошибки оценку значений полезного сигнала, поступающего на вход в аддитивной смеси с шумом.
Сети адаптивного резонанса — разновидность искусственных нейронных сетей, основанная на теории адаптивного резонанса Стивена Гроссберга и Гейла Карпентера. Включает в себя модели обучения с учителем и без учителя, которые используются при решении задач распознавания образов и предсказания.
Нелинейная система — динамическая система, в которой протекают процессы, описываемые нелинейными дифференциальными уравнениями.
Обработка сигналов — область радиотехники, в которой осуществляется восстановление, разделение информационных потоков, подавление шумов, сжатие данных, фильтрация, усиление сигналов.
Систе́ма управле́ния — систематизированный (строго определённый) набор средств сбора сведений о подконтрольном объекте и средств воздействия на его поведение, предназначенный для достижения определённых целей. Объектом системы управления могут быть как технические объекты, так и люди. Объект системы управления может состоять из других объектов, которые могут иметь постоянную структуру взаимосвязей.
Ве́йвлет (англ. wavelet — небольшая волна, рябь), иногда, гораздо реже, вэйвлет — математическая функция, позволяющая анализировать различные частотные компоненты данных. График функции выглядит как волнообразные колебания с амплитудой, уменьшающейся до нуля вдали от начала координат. Однако это частное определение — в общем случае анализ сигналов производится в плоскости вейвлет-коэффициентов (масштаб — время — уровень) (Scale-Time-Amplitude). Вейвлет-коэффициенты определяются интегральным преобразованием.
Фи́льтр Ка́лмана — эффективный рекурсивный фильтр, оценивающий вектор состояния динамической системы, используя ряд неполных и зашумленных измерений. Назван в честь Рудольфа Калмана.
Теория оценивания — раздел математической статистики, решающий задачи оценивания непосредственно не наблюдаемых параметров сигналов или объектов наблюдения на основе наблюдаемых данных. Для решения задач оценивания применяется параметрический и непараметрический подход. Параметрический подход используется, когда известна математическая модель.
Фильтр с бесконечной импульсной характеристикой (Рекурсивный фильтр, БИХ-фильтр) или IIR-фильтр (IIR сокр. от infinite impulse response — бесконечная импульсная характеристика) — линейный электронный фильтр, использующий один или более своих выходов в качестве входа, то есть образующий обратную связь. Основным свойством таких фильтров является то, что их импульсная переходная характеристика имеет бесконечную длину во временной области, а передаточная функция имеет дробно-рациональный вид. Такие фильтры.
Логический синтез в электронике — процесс получения списка соединений логических вентилей из абстрактной модели поведения логической схемы (например, на уровне регистровых передач). Наиболее распространенный пример этого процесса — синтез спецификаций, написанных на языках описания аппаратуры. Синтез выполняют программы-синтезаторы, способные оптимизировать проект согласно различным особенностям устройства, таким как временные ограничения, площадь и используемые компоненты. Такие программы обычно.
Корректно поставленная задача в математике — прикладная задача, математическое решение которой существует, единственно и устойчиво. Происходит от определения, данного Жаком Адамаром, согласно которому математические модели физических явлений должны иметь следующие свойства.
Декомпозиция — разделение целого на части. Также декомпозиция — это научный метод, использующий структуру задачи и позволяющий заменить решение одной большой задачи решением серии меньших задач, пусть и взаимосвязанных, но более простых.
Сверхпроводящая логика — класс логических схем, построенных на основе сверхпроводников и джозефсоновских контактов, и использующих эффект квантования магнитного потока. Отсутствие электрического сопротивления позволяет создавать логические схемы с высоким быстродействием, а последние разработки обладают и высокой энергоэффективностью. Сверхпроводящая логика является вариантом для создания процессоров, с высокой частотой переключения отдельных логических элементов - до сотен ГГц.
Переда́точная фу́нкция — один из способов математического описания динамической системы. Используется в основном в теории управления, связи и цифровой обработке сигналов. Представляет собой дифференциальный оператор, выражающий связь между входом и выходом линейной стационарной системы. Зная входной сигнал системы и передаточную функцию, можно восстановить выходной сигнал.
Кибернетическая физика — область науки на стыке кибернетики и физики, изучающая физические системы кибернетическими методами. Часть молекулярной физики тоже входит в Кибернетику. Под кибернетическими методами понимаются методы решения задач управления, оценивания переменных и параметров (идентификации), адаптации, фильтрации, оптимизации, передачи сигналов, распознавания образов и др., развитые в рамках кибернетики. Физические системы также обычно понимаются широко: как системы живой и неживой природы.
Мемри́стор (англ. memristor, от memory — память, и resistor — электрическое сопротивление) — пассивный элемент в микроэлектронике, способный изменять своё сопротивление в зависимости от протекавшего через него заряда (интеграла тока за время работы).
Техническая система — искусственно созданная система, предназначенная для удовлетворения определенной потребности, существующая 1) как изделие производства, 2) как устройство, потенциально готовое совершить полезный эффект, 3) как процесс взаимодействия с компонентами окружающей среды, в результате которого образуется полезный эффект.
Комбинационная логика (комбинационная схема) в теории цифровых устройств — двоичная логика функционирования устройств комбинационного типа. У комбинационных устройств состояние выхода однозначно определяется набором входных сигналов, что отличает комбинационную логику от секвенциальной логики, в рамках которой выходное значение зависит не только от текущего входного воздействия, но и от предыстории функционирования цифрового устройства. Другими словами, секвенциальная логика предполагает наличие.
Переходный процесс — в теории систем представляет реакцию динамической системы на приложенное к ней внешнее воздействие с момента приложения этого воздействия до некоторого установившегося состояния. Изучение переходных процессов — важный шаг в процессе анализа динамических свойств и качества рассматриваемой системы. Примерами внешнего воздействия могут быть дельта-импульс, скачок или синусоида.
Трассиро́вка печатных плат — один из этапов проектирования радиоэлектронной аппаратуры (РЭА), заключающийся в определении мест расположения проводников на печатной плате вручную или с использованием одной из САПР, предназначенной для проектирования печатных плат.
Блочно-ориентированные модели — это представление нелинейных систем в виде различных комбинаций инерционных звеньев и нелинейных безынерционных математических элементов. Такое представление моделей позволяет связать в явном виде входные и выходные переменные объектов с различной структурой и степенью нелинейности. К таким системам относятся системы типа Гаммерштейна, Винера, Винера-Гаммерштейна, фильтра Заде, обобщенной модели Винера и Sm-системы.
Исполни́тельное устро́йство (исполнительный элемент, актуа́тор, актюа́тор) — функциональный элемент системы автоматического управления, который воздействует на объект изменяя поток энергии или материалов, которые поступают на объект. Большинство исполнительных устройств имеют механический или электрический выход.Состоит из двух функциональных блоков: исполнительного устройства (если исполнительное устройство механическое, то его часто называют исполнительный механизм) и регулирующего органа, например.
Обратимые вычисления (англ. Reversible computing) — модель вычислений, в которой процесс вычисления является в некоторой степени обратимым. Например, в вычислительной модели, использующей наборы состояний и переходов между ними, необходимым условием обратимости вычислений является возможность построения однозначного (инъективного) отображения каждого состояния в следующее за ним. На XX век и начало XXI века обратимые вычисления обычно относят к нетрадиционным моделям вычислений.
Спектр сигнала — в радиотехнике это результат разложения сигнала на более простые в базисе ортогональных функций. В качестве разложения обычно используются преобразование Фурье, разложение по функциям Уолша, вейвлет-преобразование и др.
Вейвлет-преобразование (англ. Wavelet transform) — интегральное преобразование, которое представляет собой свертку вейвлет-функции с сигналом. Вейвлет-преобразование переводит сигнал из временного представления в частотно-временное.
Счётчик числа импульсов — устройство, на выходах которого получается двоичный (двоично-десятичный) код, определяемый числом поступивших импульсов. Счётчики могут строиться на двухступенчатых D-триггерах, T-триггерах и JK-триггерах.
Электромеханические преобразователи — это класс устройств, созданных для преобразования электрической энергии в механическую и наоборот. Также возможно преобразование электрической энергии в электрическую же энергию другого рода. Основным видом электромеханического преобразователя является электродвигатель (электрогенератор).
Метод дискретного элемента (DEM, от англ. Discrete element method) — это семейство численных методов предназначенных для расчёта движения большого количества частиц, таких как молекулы, песчинки, гравий, галька и прочих гранулированных сред. Метод был первоначально применён Cundall в 1971 для решения задач механики горных пород.
Исчисление процессов или алгебра процессов — семейство связанных подходов к формальному моделированию параллельных систем.
Приспосабливающиеся (адаптивные) системы – системы, у которых управляющие параметры или алгоритмы управления адаптируются к возмущающим воздействиям с целью оптимального управления системой. В условиях, когда другие системы с заранее заданными входными параметрами и структурой не могут обеспечить требуемое управляющее воздействие из-за изменения динамических характеристик объекта управления, применяются адаптивные системы.
По способу управления адаптивные системы подразделяются на:
Самонастраивающиеся системы – системы, желаемое управляющее воздействие которых достигается изменением параметров управляющего устройства в зависимости от данных о внешнем возмущении, данных о изменении динамических характеристик объекта управления в процессе управления.
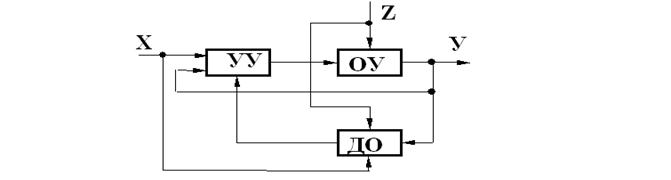
Рис. 15. Структурная схема самонастраивающейся системы управления
УУ – управляющее устройство, ОУ – объект управления,
ДО – датчик отклонений
Датчик отклонений (ДО) вырабатывает сигнал, позволяющий определить изменение параметров соответствующего звена или внешнего возмущения и в соответствии с этим оптимизировать управляющее воздействие.
Экстремальные системы применяются для автоматического поиска экстремума управляемого параметра, и, в зависимости от изменения его положения, автоматически меняющие алгоритм действий.
Приспосабливающиеся системы в большинстве случаев являются оптимальными системами, т.к. в процессе работы находятся в автоматическом поиске оптимальных параметров. Существуют пассивные и активные методы адаптации систем.
При пассивном методе адаптации взаимосвязанность звеньев системы и ее настроек с меняющимися внешними возмущениями задается на основе аксиоматических данных и существующего опыта. В случае, если объект нестационарен и известны закономерности изменения величин его параметров, то возможно применение указанного метода.
Активный метод адаптации применяется в случае изменения параметров объекта по неустановленной закономерности, в виде изменения звеньев и их настроек в зависимости от текущих данных, поступающих в процессе управления.
В зависимости от применяемого метода адаптации самонастраивающиеся системы управления подразделяются на поисковые и беспоисковые.
Поисковые системы вносят пробное изменение в параметры управляющего устройства, контролируя при этом отклик системы на данное изменение. При улучшении управляющих параметров системы, система продолжает изменение параметров управляющего устройства в том же направлении, при ухудшении качества управления, система меняет направление изменения параметров.
Беспоисковые системы регулируют управляющие параметры на основе сравнения параметров заданной эталонной модели и фактических выходных параметров.
Самоорганизующиеся системы – системы, в которых изменяются управляющие параметры, структура системы (могут включаться дополнительные звенья) и могут изменятся параметры звеньев системы.
Самообучающиеся системы – системы, у которых могут изменяться управляющие параметры, структура и параметры самой системы, кроме того, данные системы способны улучшать качество управления на основании ранее полученного опыта, т.е. запоминать и изменять алгоритм своей работы в направлении улучшения качества.
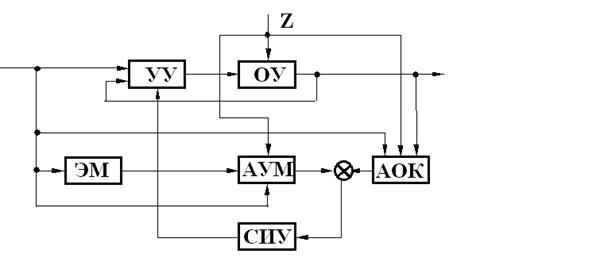
Рис.16. Структурная схема беспоисковой системы.
УУ – управляющее устройство, ОУ – объект управления,
ЭМ – эталонная модель, АУМ – анализатор качества управления эталонной
Модели, АОК - анализатор основного контура системы,
СИУ – самонастраивающееся исполнительное устройство
По своим параметрам системы могут подразделяться на стационарные и нестационарные.
Принадлежность источника энергии, создающего управляющие воздействия, характеризует системы прямого и непрямого действия. В системах прямого действия объект управления использует свою энергию, в системах непрямого действия – энергию из другого источника.
Приспосабливающиеся (адаптивные) системы – системы, у которых управляющие параметры или алгоритмы управления адаптируются к возмущающим воздействиям с целью оптимального управления системой. В условиях, когда другие системы с заранее заданными входными параметрами и структурой не могут обеспечить требуемое управляющее воздействие из-за изменения динамических характеристик объекта управления, применяются адаптивные системы.

По способу управления адаптивные системы подразделяются на:
Самонастраивающиеся системы – системы, желаемое управляющее воздействие которых достигается изменением параметров управляющего устройства в зависимости от данных о внешнем возмущении, данных о изменении динамических характеристик объекта управления в процессе управления.
Рис. 15. Структурная схема самонастраивающейся системы управления
УУ – управляющее устройство, ОУ – объект управления,
ДО – датчик отклонений
Датчик отклонений (ДО) вырабатывает сигнал, позволяющий определить изменение параметров соответствующего звена или внешнего возмущения и в соответствии с этим оптимизировать управляющее воздействие.
Экстремальные системы применяются для автоматического поиска экстремума управляемого параметра, и, в зависимости от изменения его положения, автоматически меняющие алгоритм действий.
Приспосабливающиеся системы в большинстве случаев являются оптимальными системами, т.к. в процессе работы находятся в автоматическом поиске оптимальных параметров. Существуют пассивные и активные методы адаптации систем.
При пассивном методе адаптации взаимосвязанность звеньев системы и ее настроек с меняющимися внешними возмущениями задается на основе аксиоматических данных и существующего опыта. В случае, если объект нестационарен и известны закономерности изменения величин его параметров, то возможно применение указанного метода.
Активный метод адаптации применяется в случае изменения параметров объекта по неустановленной закономерности, в виде изменения звеньев и их настроек в зависимости от текущих данных, поступающих в процессе управления.
В зависимости от применяемого метода адаптации самонастраивающиеся системы управления подразделяются на поисковые и беспоисковые.
Поисковые системы вносят пробное изменение в параметры управляющего устройства, контролируя при этом отклик системы на данное изменение. При улучшении управляющих параметров системы, система продолжает изменение параметров управляющего устройства в том же направлении, при ухудшении качества управления, система меняет направление изменения параметров.
Беспоисковые системы регулируют управляющие параметры на основе сравнения параметров заданной эталонной модели и фактических выходных параметров.
Самоорганизующиеся системы – системы, в которых изменяются управляющие параметры, структура системы (могут включаться дополнительные звенья) и могут изменятся параметры звеньев системы.
Самообучающиеся системы – системы, у которых могут изменяться управляющие параметры, структура и параметры самой системы, кроме того, данные системы способны улучшать качество управления на основании ранее полученного опыта, т.е. запоминать и изменять алгоритм своей работы в направлении улучшения качества.
Рис.16. Структурная схема беспоисковой системы.
УУ – управляющее устройство, ОУ – объект управления,
ЭМ – эталонная модель, АУМ – анализатор качества управления эталонной
Модели, АОК - анализатор основного контура системы,
СИУ – самонастраивающееся исполнительное устройство
По своим параметрам системы могут подразделяться на стационарные и нестационарные.
Принадлежность источника энергии, создающего управляющие воздействия, характеризует системы прямого и непрямого действия. В системах прямого действия объект управления использует свою энергию, в системах непрямого действия – энергию из другого источника.

Адаптивные организационные структуры - это гибкие структуры, которые характеризуются отсутствием четкой бюрократической регламентации, детального разделение видов работ. Для них свойственна некоторая размытость и гибкость управленческого аппарата, децентрализация процесса принятия решений, а также индивидуальная ответственность каждого члена организации за общий результат.

Характерные признаки адаптивных структур
Адаптивные оргструктуры характеризуются некоторыми отличительными особенностями. А именно:
- Способность быстро и сравнительно "безболезненно" менять свою форму в зависимости от изменения условий внешней среды.
- Отсутствие жесткой бюрократической регламентации деятельности руководящего звена, относительная свобода действий и творчества менеджера.
- Отсутствие глубокой специализации организации, что обусловливает открытость к экспериментам.
- Стремление к ускоренной реализации сложных программ и проектов.
- На реализацию проектов (программ) или решение проблем накладываются четкие временные ограничения.
- Создание временных управленческих органов, которые распускаются после достижения желаемого положения организации.
- Простота организационной структуры, которая выражается в минимально возможном количестве ступеней управленческой иерархии.
- Кратчайший путь прохождения информации между подразделениями, проектными группами или же отдельными сотрудниками (это минимизирует риск потери и искажения ценных данных).
- Высокая степень самостоятельности линейных руководителей в процессе принятия решений.
- Решения, принятые на нижестоящих управленческих уровнях, являются не менее значимыми чем те, что приняты менеджерами высшего звена.
- Высокая степень интегрированности персонала в процесс управления предприятием.
- Ограниченный жизненный цикл (как правило, гибкие органические адаптивные организационные структуры внедряются на период решения какой-то проблемы или выполнения задачи).
- Высокая значимость человеческого фактора (то есть работник воспринимается не только как трудовой ресурс, но и как личность).

Проектная оргструктура
Проектные организационные структуры являются временными. Они создаются на период решения какой-то организационной задачи (разработки проекта и воплощения его в жизнь). Суть данной структуры заключается в том, чтобы собрать команду квалифицированных специалистов, которые будут на протяжении ограниченного периода работать над поставленной задачей. При этом есть заданный уровень качества работы и определенные ресурсные рамки (материальные и трудовые).
Как правило, в крупных компаниях на топ-менеджмент возложено множество обязанностей в рамках проекта. Поскольку руководитель не может самостоятельно охватить решение всех задач, формируются специальные организационные структуры под каждый отельный проект. Назначается руководитель проекта, который определяет концепцию и цели, подбирает специалистов и распределяет задачи между ними, координирует и контролирует действия.
Когда проект завершается, структура распадается. Участники возвращаются на прежние должности, или переходят в новые проекты (если они являются штатными сотрудниками), или покидают организацию (если с ними был заключен срочный контракт).

Достоинства проектной оргструктуры
Проектная организационная структура обладает рядом неоспоримых преимуществ. А именно:
- благодаря интеграции разнонаправленных усилий компании удается достичь более качественных результатов в рамках конкретного проекта;
- комплексный подход к решению проблем и выполнению поставленных задач;
- активизация деятельности руководителей, связанная с созданием проектных групп;
- для решения поставленной задачи концентрируется максимум усилий;
- высокая степень гибкости, которая выражается в способности к быстрой адаптации при изменении условий внутренней или внешней среды;
- высокая степень личной ответственности как руководителя проекта, так и других его участников.
Недостатки проектной оргструктуры
Также у данного вида адаптивной организационной структуры есть некоторые недостатки. Вот основные из них:
- при наличии нескольких проектов происходит дробление ресурсов организации, что усложняет ее функционирование и развитие как единого целого;
- поскольку проектная оргструктура не является устойчивой, происходит дезориентация сотрудников, затрудняется осознание ими своего места в организации;
- руководитель должен руководить не только непосредственно проектом, но также регулировать место подчиненной ему группы в организационной структуре предприятия;
- трудности с эксплуатацией специалистов на перспективу;
- если проектных структур несколько, может происходить дублирование функций.
Матричная оргструктура
Среди организационных структур адаптивного типа матричная является достаточно распространенной и в то же время наиболее сложной. Она подразумевает закрепление двух направлений руководства - вертикального и горизонтального. Структура возникла в связи с острой необходимостью проведения быстрых изменений без снижения эффективности использования рабочей силы. Впервые матричные оргструктуры возникли в космической отрасли.
Вертикальное управление - это топ-менеджмент, который курирует работу функциональных подразделений. Горизонтальное управление подразумевает руководство отдельными проектами. Руководители проектов определяют приоритетность и временные рамки решения задач, а за руководителями структурных подразделений закреплено право выбора методики работы и назначения исполнителей. При этом работники организации (то есть участники проектов) подчиняются сразу двум руководителям в одинаковой степени (таким образом, образуется система двойного подчинения).
Матричная структура образуется путем наложения проектной на постоянную оргструктуру предприятия (линейно-функциональную). При этом задача высшего руководства заключается в том, чтобы поддерживать баланс данной "конструкции".
Различают два вида матричных оргструктур. Первая подразумевает взаимодействие руководителя с несколькими группами подчиненных (постоянными членами проектной группы и работниками других функциональных подразделений, подчинение которых ограничено с сохранением подчинения основным руководителям). Вторая подразумевает временное подчинение руководителю проекта исполнителей из определенных функциональных подразделений.

Достоинства матричной оргструктуры
У данного типа адаптивных организационных структур есть ряд неоспоримых преимуществ. А именно:
- тесная консолидация различных подразделений и видов деятельности организации;
- качественная одновременная реализация большего количества проектов по сравнению с проектной и бюрократическими структурами;
- усиление степени взаимодействия между различными функциональными подразделениями;
- активизация деятельности управленческого аппарата благодаря тесному взаимодействию с функциональными подразделениями;
- вовлечение руководителей и работников всех уровней в творческую деятельность по формированию и реализации новых идей;
- сокращение нагрузки на высшее руководство благодаря делегированию части полномочий менеджменту среднего звена с сохранением права контролировать ключевые решения;
- усиление ощущения личной ответственности руководителя за реализацию проекта в целом и его отдельных элементов;
- высокая степень гибкости и скоординированности выполняемых функций;
- преодоление коммуникационных барьеров внутри организации без нарушения функциональной специализации;
- повышение эффективности использования ресурсов за счет повышения качества текущего управления;
- широкие возможности для маневрирования ресурсами при одновременной реализации нескольких проектов;
- широкие возможности для внедрения новых эффективных методов управления;
- относительная автономность проектных групп способствует формированию у работников новых навыков в сфере принятия решений и проведения хозяйственных операций;
- быстрое реагирование на изменения во внешней среде.
Недостатки матричной оргструктуры
Но есть и негативные моменты, которые вызывают у специалистов скептическое отношение. Вот основные недостатки матричной организационной структуры управления:
- нарушение принципа единоначалия из-за системы двойного подчинения;
- сложность и громоздкость структуры;
- при нечетком распределении прав и обязанностей в матричной системе отмечается тенденция к анархии;
- большое количество руководителей приводит к учащению конфликтных ситуаций, а также к увеличению накладных расходов;
- поскольку властные полномочия распределены нечетко, между руководителями проектов и подразделений может возникать конкуренция за власть;
- использование матричной структуры может приводить к двусмысленности и рассеиванию ответственности, что мешает достижению высококачественных результатов;
- нарушение традиционной системы взаимосвязей между подразделениями;
- конфликтные ситуации между руководителями разных проектов из-за дефицита ресурсов;
- существенно затрудняется реальный контроль за деятельностью подразделений и проектных групп;
- нарушения деятельности подразделений из-за длительного отсутствия специалистов, привлеченных к реализации программ и проектов;
- неэффективность в кризисные периоды;
- сложности практической реализации структуры, связанные с необходимостью дополнительной подготовки сотрудников и разработки соответствующей организационной культуры.
Сетевая оргструктура
Наиболее современной адаптивной организационной структурой является сетевая. Она противопоставляет должностной иерархии и функциональному разделению интеллектуальное сотрудничество и сетевую кооперацию. Такие преобразования вызваны тем, что на смену материальным активам как глобальному ресурсу пришел интеллектуальный потенциал.
Иерархические организационные структуры менеджмента становятся все менее актуальными. Дело в том, что они возникли тогда, когда в экономической среде отсутствовала критическая неопределенность развития. Сейчас же наступил период глобальной неопределенности, что заставляет менеджеров непрерывно обучаться решению все новых проблем. Внештатные ситуации возникают все чаще, а потому традиционные механизмы управления демонстрируют свою неэффективность.
В сетевой оргструктуре каждое звено управления рассматривается не как замкнутое самодостаточное подразделение, а как общедоступный ресурс. Подразделения взаимодополняют друг друга, что увеличивает общую полезность работы. Таким образом, иерархия управления размывается, а все менеджеры оказываются в равных условиях как носители знаний, опыта, капитала и так далее. Но это возможно реализовать только при условии налаженных сетевых связей.
Переход к иерархической организационной структуре менеджмента происходит постепенно в несколько этапов. Сначала функциональные подразделения преобразуются в проблемно-ориентированные команды во главе с менеджерами, которые одновременно могут состоять в высшем руководящем звене. На следующем этапе менеджеры отказываются от ключевой роли в своих командах, сохраняя влияние на них. Они становятся больше специалистами, чем управленцами. Менеджмент является не надстройкой, а поддерживающей базой для производственного процесса. Таким образом, прямое сетевое сотрудничество вытесняет устаревшие бюрократические структуры.
Важной отличительной чертой данного типа адаптивных структур является то, что менеджмент может быть преобразован в виртуальный ресурс, которым можно пользоваться, не вступая в непосредственный контакт. Виртуальный менеджер более мобилен и доступен. Более того, в виртуальную среду могут переходить целые организации. Это оптимальное решение в условиях постоянно меняющейся конъюнктуры.

Достоинства сетевой оргструктуры
Можно выделить несколько достоинств сетевой организационной структуры управления. А именно:
- молниеносная реакция на изменения, которые происходят как во внутренней, так и во внешней среде;
- возможность выбирать наиболее приоритетные виды деятельности на данный момент;
- существенное сокращение расходов и ощутимое увеличение доходов;
- исключение вероятности дублирования управленческих исполнительных функций;
- широкие возможности для внутриотраслевого и межотраслевого партнерства.
Недостатки сетевой оргструктуры
Но есть и недостатки у сетевой организационной структуры управления. Вот основные из них:
- нарушение принципов организационного сегментирования;
- усиление рисков, связанное с зависимостью от кадрового состава и высокой вероятности текучести кадров;
- отсутствие гарантированной социальной и материальной поддержки участников сетевой оргсистемы.
Кольцевая оргструктура
К адаптивным организационным структурам относится также кольцевая. Эта концепция является одной из новейших, она зародилась в 80-е годы. В соответствии с ней на каждом управленческом уровне создается совет, в который входит руководитель и представители подразделений различных уровней (как правило, на уровень ниже и на уровень выше). При этом руководитель определенного уровня может принимать участие сразу в нескольких советах, что обеспечивает сцепление уровней в единую систему, которая получила название кольцевой.
Учитывая опыт организаций, которые уже успели внедрить подобную систему управления, можно сделать вывод о ее эффективности, как и у других основных разновидностей адаптивных структур. Благодаря этому механизму исполнители всех уровней четко осознают цели и задачи высшего руководства. А высшее руководство, в свою очередь, понимает потребности и переживания сотрудников всех подразделений.

Централизация и децентрализация
При формировании организационной структуры управления организации важную роль играет оптимальное соотношение централизации и децентрализации:
- Централизованная организация - это такая организация, в которой за менеджментом высшего звена закреплено максимальное количество полномочий, касающихся принятия важных управленческих решений. Такой подход позволяет максимизировать контроль и координацию работы сотрудников на всех уровнях, а также существенно уменьшает количество ошибочных решений и масштабы негативных последствий от них. Также высокая степень централизации практически исключает дисбаланс между ресурсным и информационным снабжением различных отделов.
- Децентрализованная организация - это такая организация, в которой управленческие полномочия равномерно распределены между менеджерами различных уровней. Такая система характерна для крупных предприятий, управлять которыми посредством жесткой централизации практически невозможно, ведь требуется переработка существенных объемов информации и принятие огромного количества решений. Благодаря децентрализации принимать ответственное решение может тот менеджер, который ближе всего находится к возникшей проблеме. Также децентрализация способствует инициативности и повышению степени ответственности персонала. Она способствует формированию качественного кадрового резерва (в частности, управленческого).
На практике не бывает абсолютно централизованных или полностью децентрализованных организаций. Как правило, имеется федеральная децентрализация. Это означает, что важнейшие решения принимает высшее руководство, а решение оперативных задач остается за линейными руководителями. А вот современные адаптивные организационные структуры характеризуются все большей степенью децентрализации.

Необходимость внедрения адаптивных систем
Между бюрократическими и адаптивными организационными структурами в отечественной экономике, к сожалению, продолжают преобладать первые. Тем не менее внедрение подходящей современной оргструктуры еще не гарантирует достижения успеха (в то время как выбор неправильной оргструктуры является гарантией провала).
Проблематика выбора организационных структур в отечественных условиях связана с кризисными явлениями и нестабильностью в экономике. В связи с этим стоит отметить следующее:
В статье представлен аналитический обзор адаптивных систем управления. Автор рассматривает развитие адаптивных систем, постановку задачи проектирования адаптивных систем, классификацию и структуру адаптивных систем. Приведены функциональные схемы адаптивных систем и методы настройки регулятора адаптивных систем управления. Описана эталонная модель, процесса работы некоторых видов СНС. Также в статье сообщается о новых структурах СНС. Отдельный раздел занимает описание активных и пассивных СНС. Описывается процесс адаптации и рассказывается о его свойствах как: • выходные параметры объекта; • наблюдаемое поведение объекта; • отклонение показателя качества;

3. Зайцев Г. Ф. Теория автоматического управления и регулирования. — 2-е изд., перераб. и доп.— К.: Выща шк. Головное изд-во, 1989.С. 387. (дата обращения 20.10.2020)
4. Задорожная Н.М. АДАПТИВНЫЕ СИСТЕМЫ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ С ДВУМЯ ЭТАЛОННЫМИ МОДЕЛЯМИ // Современные проблемы науки и образования. – 2015;
Разработка адаптивных систем автоматического управления привлекала исследователей задолго до создания предпосылок для их широкого внедрения. Различные структуры и алгоритмы СНС предлагались в общих чертах без конкретизации принципов действия отдельных блоков. При классификации СНС в разной литературе приоритет отдавался разным критериям, что привело к их существенному несовпадению. Современный уровень техники позволяет реализовать сколь угодно сложные алгоритмы управления почти без удорожания системы в целом за счет применения цифровых регуляторов на основе микропроцессоров. Это требует разработки последовательной классификации различных видов СНС, наполненной конкретными схемами их реализации с наиболее полной детализацией основных блоков и разъяснением их принципов действия. Для различных вариаций применений необходим анализ их относительных преимуществ и недостатков.
Существуют общие свойства, характеризующие процесс адаптации:
· выходные параметры объекта регулирования и характеристики возмущающих факторов находятся под постоянным контролем и управлением с помощью устройств, дополнительно включаемых в состав управляющей системы;
· наблюдаемое поведение объекта описывается некоторым показателем качества, оценивающим в количественной форме характер протекания процесса управления;
· отклонение показателя качества за пределы допуска влечет за собой автоматическую настройку параметров регулятора или замену алгоритма управления, результатом которых является достижение желаемого показателя качества или реализации поставленной цели.
1 Адаптивные системы.
Адаптивные системы возникают в связи с усложнением решаемых задач, отсутствием практической возможности подробного изучения процессов в управляемых объектах. Примерами таких объектов могут быть: многокомпонентные технологические процессы химической продукции; высокоскоростные летательные аппараты (ракеты). Это те объекты, где априорные данные о характеристиках или уравнениях, описывающих все реакции, получить невозможно, слишком широкий разброс параметров. Неадаптивные методы управления предусматривают наличие достаточного объёма априорных сведений о внутренних и внешних условиях работы на предварительной стадии. Чем полнее априорная информация о характеристиках, тем выше качество неадаптивного управления. Эффект приспосабливаемости к изменениям условий внешней среды в адаптивных системах достигается за счёт того, что часть функций по получению, обработке и анализу недостающей информации об управляющем процессе осуществляется не на предварительной стадии, а самой системой в процессе работы. Это способствует более полному использованию рабочей информации. Развитие вычислительной техники открывает новые возможности в области реализации адаптивных систем автоматического управления (САУ), например, в случае настройки САУ в процессе эксплуатации в реальном масштабе времени при изменении динамических характеристик объектов управления.
С целью преодоления недостатков работы САУ в алгоритм настройки САУ (и в его структуру) в дополнение к эталонной модели вводится вторая эталонная модель, называемая подстраиваемой моделью (ПМ) .С помощью ПМ осуществляется параметрическая идентификация САУ, при которой ПМ подстраивается к настраиваемой САУ. После чего выполняется настройка ПМ к заданным требованиям качества работы САУ с использованием эталонной модели (ЭМ) специального вида (параметрическое множество ЭМ).[1]
2 Постановка задачи проектирования адаптивного управления.
1. Проектирование САУ ведется в предположении, что параметры ее элементов не изменяются, а внешние возмущения имеют определенный вид и величину. Однако, в условиях широкого диапазона изменения параметров в результате эксплуатации и внешних возмущающих воздействий нельзя добиться требуемого качества управления, не придав новых свойств САУ, учитывающих изменяющиеся параметры.
Наилучшим решением данного вопроса является придание САУ свойств адаптивности (приспосабливаемости) с тем, чтобы она могла изменять свои характеристики в зависимости от изменения внешних условий, параметров управляющего устройства или объекта управления.
Все САУ можно разделить на две группы:
- САУ с заранее (априорно) заложенными характеристиками, не обладающие способностью контролируемого изменения свойств в процессе реальных условий работы,
- САУ адаптивные (приспосабливающиеся), которые обладают свойством контролируемого изменения характеристик, приспособления к изменению внутренних и внешних условий работы.
2. Особенностями адаптивных систем является выполнение ими трех функций:
- получение и анализ текущей информации об управляемом процессе (идентификация);
- решение задачи синтеза по заданному показателю качества;
- реализация процесса контролируемого изменения свойств системы управления.
Для выполнения этих функций в основной контур управления вводится вычислительное устройство (ВУ), имеющее три взаимодействующих блока: анализатор, синтезатор, исполнительное устройство.
Анализатор - решает задачу получения и анализа текущей информации, характеризующей динамические свойства системы и действующих возмущений.
В зависимости от типа анализатор может получать текущую информацию на основе анализа динамических характеристик всей замкнутой САУ или ее объекта управления, с одновременной оценкой характера управляющих и возмущающих воздействий.
Синтезатор - решает задачу синтеза адаптивных свойств системы в зависимости от проанализированного изменения ее параметров, структуры или алгоритма управления.
Исполнительное устройство - передает выходные воздействия с ВУ на управляющее устройство основного контура управления, вызывая перестройку параметров или вырабатывая пробные управляющие воздействия для получения дополнительной текущей информации о динамических свойствах объекта управления.
3. По диапазону адаптивных свойств САУ можно разделить на три основных класса:
- самонастраивающиеся САУ (СНС), которые обеспечивают контролируемое изменение параметров или управляющих воздействий;
- самоорганизующиеся САУ (СОС), обеспечивающие контролируемое изменение структуры, а также возможное изменение параметров и управляющих воздействий;
- самообучающиеся САУ, в которых обеспечивается контролируемое изменение структуры, параметров и алгоритмов управления с использованием опыта функционирования.
Самонастраивающейся системой называют такую САУ, которая в процессе эксплуатации при изменении характеристик и внешних воздействий или параметров объекта управления самостоятельно без участия человека изменяет параметры САУ, ее структуру, а также настройку для поддержа ния оптимального режима работы управляемого объекта.[3]

Рис.2 Общая схема СНС: А - анализатор, С - синтезатор, ИУ - исполнительное устройство, КСН - контур самонастройки, ОКУ- основной контур управления, УУ - управляющее устройство, ОУ - объект управления, ОС - обратная связь.
2 Самонастраивающиеся системы (СНС).
Самонастраивающиеся системы — это такие системы, которые обладают способностью в той или иной мере приспосабливаться к изменяющимся внешним условиям. Именно благодаря такой способности самонастраивающиеся системы не требуют полной начальной информации о свойствах управляемого процесса. Действия по управлению объектом сочетаются в них с непрерывными или периодическими испытаниями объекта. За счет результатов этих испытаний выполняется недостаток начальной информации. В искусственных или технических системах самонастройки произошло их разделение на четыре группы:
- системы экстремального регулирования (системы автопоиска максимума или минимума управляемой величины);
- системы регулирования с самонастройкой параметров корректирующих устройств;
- самооптимизирующиеся системы автоматического управления;
2.1 СНС с эталонной моделью.
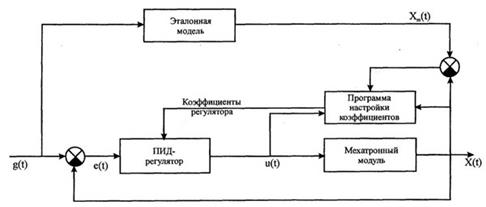
Она показывает идеальную желаемую реакцию системы на задающий сигнал g(t). В качестве эталонной модели применяют типовые звенья систем автоматического управления (например, апериодическое звено). Параметры ПИД-регулятора (пропорционально-интегрально-дифференциальный регулятор) настраиваются так, чтобы минимизировать рассогласование между выходом модели и реальной системы.

где k – настраиваемые коэффициенты ПИД-регулятора; А – постоянный коэффициент, задающий скорость адаптации.
Рис. 8. Блок-схема адаптивной системы с эталонной моделью.
Функция градиента определяет чувствительность ошибки c(t) к вариации коэффициентов регулятора. Абсолютная устойчивость замкнутой системы, которая является существенно нелинейной, обеспечивается подбором параметра А в программе настройки. Таким образом, управляющий компьютер для реализации адаптивного управления по данной схеме должен в реальном времени решать следующие задачи:
· формировать задающий сигнал для управляемой системы;
· рассчитывать идеальную реакцию по эталонной модели;
· вычислять коэффициенты регулятора в соответствии с программой настройки, определять текущую ошибку и выдавать сигнал управления на вход мехатронного модуля.
Помимо рассмотренной блок-схемы с эталонной моделью известны и другие методы автоматической настройки параметров и структуры регуляторов.[4]
4 Структура и типы адаптивных систем управления.
Адаптивная система управления называется поисковой, если в нее для изучения объекта подаются специальные (поисковые) сигналы, и беспоисковой, если в систему никаких поисковых сигналов для изучения объекта не подается.
Беспоисковые адаптивные системы управления по способу получения информации для подстройки параметров регулятора делятся на адаптивные системы управления (или самонастраивающиеся системы (СНС)) с эталонной моделью и адаптивные системы управления с идентификатором. Адаптивные системы управления с эталонной моделью содержат динамическую модель системы, обладающую требуемым
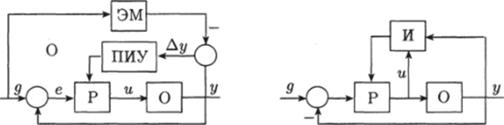
Рис. 10. СНС с эталонной моделью Рис. 11. СНС с моделью-идентификатором
качеством и называемую эталонной моделью (рис. 10). Адаптивная система управления с эталонной моделью (ЭМ), кроме основного контура, содержащего регулятор (Р) и объект (О), включает контур с ЭМ и преобразовательное-исполнительное устройство (ПИУ). Эталонная модель вырабатывает желаемый (эталонный) выходной сигнал.
Преобразовательное-исполнительное устройство (его также называют механизмом адаптации) обрабатывает разностный сигнал (разность между фактическим и эталонным сигналами) и производит подстройку параметров регулятора. Выбор эталонной модели является частью процесса синтеза адаптивной системы управления.
Адаптивные системы управления с идентификатором в контуре адаптации содержат идентификатор, который служит для идентификации (определения) неизвестных параметров объекта на основе изучения входного и выходного сигналов объекта. Полученная идентификатором информация затем используется для определения нужных значений параметров регулятора и их подстройки.
Возможны два способа адаптивного управления с идентификатором: прямой и непрямой. При непрямом адаптивном управлении сначала получается оценка параметров объекта, а затем на основе полученных оценок определяются требуемые значения параметров регулятора и производится их подстройка. При прямом адаптивном управлении исключается этап идентификации параметров объекта. В этом случае, учитывая, что между параметрами регулятора и объекта имеется связь, определяемая выбранным законом управления, производится непосредственная оценка и прямая подстройка параметров регулятора. [5]
В результате анализа наиболее существенных признаков адаптивных систем предложена следующая классификация самонастраивающихся систем. Системы с адаптацией по помехе (или иным сигналам, косвенно или прямо описывающим изменение параметров объекта или условий его действий). С эталонной моделью объекта (не уточняемой). С идентификатором объекта или с уточняемой его моделью. С блоком прогноза выхода объекта. Системы с адаптацией по ошибке управления. Экстремальные системы, переводящие систему в состояние вблизи экстремума. Наибольший практический интерес вследствие наибольшей универсальности и наилучшего эффекта представляют, по-видимому, системы со стабилизацией основного контура и системы с идентификатором или с уточняемой моделью объекта.
Читайте также: