
Роботы в хирургии доклад
Обновлено: 01.06.2024
Проведение хирургических операций с помощью роботов уже не является сюжетом из научно-фантастического произведения. Использование их в клинике стало не просто возможным, но и весьма перспективным. Хотя у большинства людей "робот" ассоциируется с именем Айзека Азимова, первым этот термин ввел чешский писатель Карел Чапек для обозначения механизма, обладающего так называемыми антропоморфными свойствами.
На производстве и в научных исследованиях применяются промышленные роботы - программно-управляемые автоматические манипуляторы, выполняющие рабочие операции со сложными пространственными перемещениями. Доктор Davies в своей работе, посвященной достижениям робототехники, дал следующее определение
для робота, используемого в хирургических целях: "… управляемая система, наделенная чувствительностью и запрограммированная для выполнения движений и манипулирования инструментами при проведении хирургических операций". Следует подчеркнуть, что задачей робота является не замещение хирурга, а расширение спектра его возможностей.
Роботов, используемых в хирургии, можно разделить на пассивных, полуактивных и активных.Пассивный робот предназначен, как правило, для удержания инструмента в определенном положении, что облегчает выполнение и увеличивает точность какого-либо этапа оперативного вмешательства. Изменять положение инструментов система может только с помощью хирурга. Примером может служить использование робота для удержания иглы при проведении биопсии в нейрохирургии.
Полуактивный робот выполняет ряд запрограммированных манипуляций, в определенной последовательности осуществляя движения в различных направлениях и плоскостях. Такой робот используется, например, для протезирования коленного сустава.
Активный робот оснащен манипуляторами, подобными рукам хирурга, и фактически сам приводит в движение инструменты. В настоящее время такими системами дистанционно управляет хирург, а механические руки робота воспроизводят движения его кистей и пальцев, увеличивая точность, уменьшая усталость и устраняя тремор. Активные системы используются для трансуретральной простатэктомии, эндоскопической телероботохирургии.
История
Первый хирургический робот Unimate Puma 560 был создан в конце 1980-х и использовался в нейрохирургии для удерживания инструментов при проведении стереотаксической биопсии.
В 1986 году Калифорнийский университет в Дэвисе и исследовательский центр Томаса Дж. Уотсона корпорации IBM начали совместную работу по созданию робота-хирурга. В 1992 году компания Integrated Surgical Systems на основе результатов этих исследований создала систему помощника хирурга, которая так и называлась - Robodoc Surgical Assistant System. Способности Robodoc в то время были скромными: он умел всего лишь шлифовать костные поверхности для лучшего контакта с имплантатом.
В те же девяностые годы в Имперском Колледже в Лондоне был создан робот для трансуретральной резекции гиперплазированной предстательной железы - Probot, допущенный к клиническим испытаниям в 1996 году. Система Probot, оснащенная ультразвуковым щупом, позволяла создать трехмерную модель простаты, быстро определить участок патологически измененной железы и произвести его резекцию.
В 1994 году компания Computer Motion изготовила первого робота-хирурга, получившего сертификат US FDA - Automated Endoscopic System for Optimal Positioning (AESOP). Это была механическая рука, наделенная семью степенями свободы движений и предназначенная для автоматического изменения положения эндоскопа. Двумя годами позже AESOP "приобрел" слух и смог выполнять голосовые команды хирурга. А в 1998 году появился его "дальний родственник" - активный робот ZEUS, предназначенный для дистанционной эндоскопической хирургии.

Параллельно с ZEUS создавалась другая аналогичная система, получившая название DA VINCI. В начале 90-х известная корпорация SRI International стала одним из нескольких акцепторов гранта, выставленного на конкурс правительственным агентством DARPA, на разработку методов телехирургии. Был создан прототип робота-хирурга, вдохновивший Фредерика Молла в 1995 году учредить компанию Intuitive Surgical. Здесь идеи, заложенные SRI, эволюционировали и воплотились в то, что сегодня известно как DA VINCI.
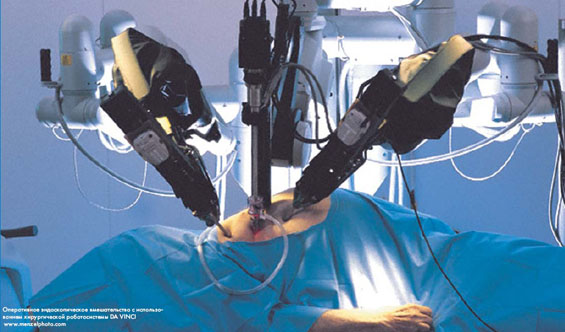
В принципе, системы DA VINCI и ZEUS имеют много общего: это активные роботы, управляемые дистанционно со специальной рабочей станции. Эти системы позволяют оператору находиться на значительном расстоянии от больного, управляя тремя "руками" робота (две для удержания инструментов и осуществления манипуляций, а третья для продвижения эндоскопической камеры). Современная компьютерная и видеотехника создает перед глазами хирурга высококачественное изображение операционного поля.
Первоначально подобная технология разрабатывалась для применения в военных условиях, при повышенной радиации или даже в космосе, позволяя квалифицированному медперсоналу находиться вне опасности. Однако роботы "прижились" в ведущих современных клиниках, и в настоящее время в мире уже выполнены тысячи операций с использованием DA VINCI и ZEUS. Именно между этими системами сегодня развернулась основная конкурентная борьба.
Достаточно большой опыт применения роботов накоплен в области протезирования тазобедренного и коленного суставов. Системы ROBODOC и ACROBOT, например, уже имеют достаточную известность и позволяют эффективно планировать оперативное вмешательство, тщательно подготавливать кость для установки протеза в оптимальной позиции, сокращая этим время операции и уменьшая ее травматичность.

Сегодняшний день
Роботохирургия продолжает стремительно развиваться. Стала реальностью так называемая трансконтинентальная телероботохирургия. В 2001 году хирурги успешно удалили желчный пузырь с помощью дистанционно управляемого робота ZEUS, установленного в одном из госпиталей Франции, находясь от пациентки на расстоянии 7000 км в Нью-Йорке. Современные средства связи обеспечили передачу сигналов в обоих направлениях (от видеокамеры лапараскопа к хирургу и обратно - от станции управления к роботу) по трансатлантическому волоконно-оптическому кабелю.
Задержка сигнала составляла менее 200 мсек (безопасно допустимое отставание сигнала составляет около 300 мсек). Пока непосредственно возле больного должен находиться квалифицированный ассистент хирурга, который обеспечивает доступ робота в зону оперативного вмешательства. Интересно, что для безопасности пациента в случае сбоя связи или прекращения визуального контроля хирурга (достаточно отвести голову от консоли наблюдения) система входит в резервный режим ожидания, прекращая манипуляции.
В августе 2002 года в Virginia Urology Center выполнена первая успешная роботомикрохирургическая урологическая операция. С использованием все того же DA VINCI была прозведена так называемая Vasectomy Reversal - микрохирургическая операция по восстановлению целостности семявыносящих протоков.
Перспективы
Чего же можно ожидать от роботохирургии в будущем? Новые возможности манипуляторов и визуального контроля позволят довести до совершенства оперативные вмешательства на бьющемся сердце. "Руки" робота смогут двигаться в такт сокращениям, постоянно оставаясь на одинаковом расстоянии от зоны оперативного вмешательства и как бы нивелируя колебания стенки сердца. При этом операционное поле, которое хирург видит на экране, будет оставаться неподвижным.
Продолжаются работы по созданию новых роботов. В январе 2003 года ученые из Nanyang Technological University совместно с хирургами из National Neuroscience Institute (Сингапур) сообщили о создании роботосистемы, предназначенной для обеспечения хирургического доступа к глубоко расположенным опухолям головного мозга (в области основания черепа). Робот, получивший название HEXAPOD, успешно прошел испытания в экспериментах и в настоящее время готовится к внедрению в клинику.


В конце ХХ века в помощь хирургу-человеку пришли роботы и в чем-то заменили его. Врач и наш автор Альбина Нурдинова разбирает пять направлений современной хирургии, которые стали возможны благодаря роботам.
Хирургия – древнейшая медицинская специальность. Вырезать отравленный наконечник стрелы из тела соплеменника и прижечь рану раскаленным железом уже было хирургической операцией. И даже ударом по голове обезболивали процедуру – ведь человек без сознания не испытывает боли. Уже 8 тысяч лет назад умели удалять камни из мочевого пузыря и делать трепанацию черепа. Образ хирурга ХIХ-ХХ века неотделим от скальпеля, сверла и долота, которые без обезболивания и наркоза вполне могли служить орудиями пыток.
Медицинские роботы сегодняшнего и завтрашнего проникают в доселе недоступные части человеческого организма и оперируют в тех областях, куда до этого не подступался ни один хирург.
Аппендицит вчера и завтра
Как проходит стандартная операция по поводу аппендицита? Операционное поле изолируется стерильным материалом, обезболивается с помощью инъекций, скальпелем производится разрез, специальными металлическими зажимами пережимаются сосуды и останавливается кровотечение, хирург находит воспалившийся участок кишечника, с помощью скальпеля удаляет его, зашивает иглой со специальным шовным материалом, затем послойно ушивает разные анатомические образования, которые находятся между кожей и кишечником. Последней зашивается рана от разреза на коже. Через 1-2 недели снимаются швы.
Робот SurgiBot позволит провести ту же операцию по удалению аппендикса лапароскопически – через прокол в коже — с высокой точностью. Хирург, управляя двумя щупами и камерой-фонариком, наблюдает за ходом процесса на стандартном мониторе, регулируя чувствительность управляющих ручек для повышения точности движения щупов.

Минимум боли, минимум кровопотери и травматичности, практически нет риска инфицирования, косметический эффект и быстрое восстановление после вмешательства – вот несомненные плюсы.
Да Винчи хирургии
Самым известным хирургическим роботом в мире является да Винчи. Это робот-ассистент, стоимость — 1,5-2 млн евро.
Да Винчи — ветеран, его начали использовать еще в конце 1990-х годов. Сегодня более 3000 da Vinci выполняют миллионы операций по всему миру. Большая часть их установлена в США, Израиле и Германии. Порядка двух десятков таких устройств есть и в России. Первая в России операция с использованием робота da Vinci была проведена на сердце в Москве в 2014 году.
Отличает его точность инструментов, управляемых кончиками пальцев, четыре роботизированные руки с инструментами, имеющими 7 степеней свободы — больше чем кисть человеческой руки — и изгибающиеся на 90 градусов.

Робот-хирург da Vinchi
Если представить прежние операции при опухолях, когда приходилось удалять целиком не только сам пораженный раком орган, но и окружающие ткани, то использование да Винчи позволяет провести сложные операции с сохранением органа и его функции. Прорывом стали гинекологические операции при злокачественных опухолях, когда женщина сохраняет способность забеременеть и выносить ребенка.
Молоток vs. Рободок
Одной из самых частых проблем в ортопедии являются заболевания суставов и переломы. Особенно трагичным является перелом шейки бедра, приводящий к инвалидности и иногда к смертельному исходу.
Операции по замене крупных суставов выполняются давно, но являются сложными и травматичными. Сначала изготавливается эндопротез из металла, полимерного пластика или керамики. Процедура замены тазобедренного сустава протекает от полутора до трех часов и состоит в удалении пораженного сустава и замене его искусственным имплантатом.

Всему этому предшествуют сложные расчеты, не гарантирующие полной точности – ведь в процессе операции нужно удалить разрушенную и пораженную часть кости, что можно точно определить только во время операции, при этом высок риск перелома бедра, т.к. используется молоток и долото. Риски операции также связаны с возможностью занесения инфекции в организм и большими кровопотерями.
Система Рободок (Robodoc) механически формирует полость необходимых размеров для установки протеза тазобедренного сустава. Предварительно Robodoc создает трехмерную модель на основании данных компьютерной томографии. Хирург выбирает необходимую модель протеза из загруженных в базу данных компьютерной системы. Далее Robodoc использует эти данные для формирования полости для установки протеза. Получающаяся полость с очень большой точностью соответствует протезу, что улучшает исход.

Искусственный мозг оперирует настоящий мозг
Высокая точность особенно важна при операциях на головном мозге. Развитие роботов и компьютерных технологий в нейрохирургии и микрохирургии глаза прошло путь от помощников хирурга до роботов, чья цель состоит в выполнении операций на головном мозге без всякого вмешательства руки человека. Примером такого робота служит искусственная механическая рука, которая манипулирует различными инструментами и приборами, заполнена электромагнитными тормозами и датчиками.
Cистема Минерва (MINERVA) используется вместе с компьютерным томографом, с которым робот связан при помощи стереотаксической рамки, фиксированной к голове пациента. Робот сам по себе представлен в виде механизма, который держит инструменты. Он обладает семью степенями свободы и манипулирует скальпелями, электродрелями, сверлами, иглами, зондами, электродами для электрокоагуляции. Точность движений при этом выверяется до микрона.
Микророботы-эндоскопы и операции без разрезов
Биоинженерные технологии совершают революцию в XXI веке. Хирурги и инженеры сотрудничают более тесно, чем когда-либо ранее. Например, использовавшиеся при исследовании заброшенной атомной станции технологии заинтересовали медиков. Речь идет о роботе-змее The Flex System. Это гибкая эндоскопическая система, позволяющая проводить операции без единого разреза на теле. При оперативном вмешательстве система вводится через горло и может достигать самых труднодоступных мест.

Робот-хирург-змея The Flex System
Кроме того, робот оснащен дополнительными инструментами, позволяющими проводить широкий спектр операций с высокой точностью, а также камерой высокого разрешения, позволяющей рассмотреть ткани органа в мельчайших подробностях.
Вместо заключения
На этом видео робот да Винчи пришивает снятую с виноградины кожицу, демонстрируя ювелирную точность:
Роботичеcкие технологии неуклонно и стремительно входят в нашу повседневную жизнь. Применение роботов широко распространено в различных профессиональных отраслях. Робот-ассистированная техника выполнения оперативных вмешательств в настоящее время является наиболее инновационным направлением в медицине. В данной статье описывается история развития роботических технологий в медицине в целом и в урологии в частности.
Ключевые слова: робот-ассистированная хирургия, роботы в медицине, робот da Vinci.
Введение
В эру телекоммуникаций и компьютерных технологий произошли серьезные изменения во всех аспектах профессиональной и бытовой жизнедеятельности. Новейшие концепции автоматизированных и роботических решений нашли свое применение во многих отраслях промышленности. С недавнего времени роботы в медицине в целом и в хирургии в частности стали неотъемлемой частью повседневной практики.
Определение
История
С древних времен человечество пыталось использовать машины для облегчения своего труда, выполнения наиболее тяжелой работы, требующей значительных физических усилий. Однако в IX в. до н.э. впервые подобное устройство было предложено для развлечения. Древнегреческий философ, математик и механик Архит Тарентский (428–347 гг. до н.э.) спроектировал первую летающую машину – деревянную птицу, способную самостоятельно двигать крыльями при помощи пара и перемещаться на расстояние до 200 м (рис. 1).

Рис. 1. Архит Тарентский (428–327 гг. до н.э.) и его летающая машина
Следующим шагом стало изобретение древнегреческим математиком Ктесибием Александрийским (285–222 гг. до н.э.) в 250 г. до н.э. хитроумных водяных часов, названных клепсидрами, ставшими самыми точными определителями времени вплоть до изобретения в XVII в. голландским физиком Христианом Гюйгенсом маятника для поддержания незатухающих колебаний (рис. 2).
Великий итальянский ученый, анатом, естествоиспытатель, художник и архитектор Леонардо да Винчи (1452–1519) (рис. 3) создал несколько так называемых манекенов, способных выполнять запрограммированные действия.

Рис. 3. Леонардо да Винчи (1452–1519)
В эпоху Возрождения имели место еще несколько случаев создания подобных манекенов. Наиболее знаменитыми стали женщина, играющая на лютне, созданная Джианелло Ториано в 1540 г., и ребенок Пьера Жаке Дро, представленный в 1772 г.

Рис. 5. Машина Жаккара

Рис. 6. Паровой человек
К настоящему времени функциональные роботы продолжают развиваться и уже способны не только самостоятельно передвигаться (Cart, Genghis, Shadow Biped), но и взбираться по лестницам и переносить грузы (Asimo, Honda), играть на музыкальных инструментах (Partner), изображать домашних животных (Aibo, iCybie), собирать образцы породы на Марсе (Sojourner), обеспечивать работу международной космической станции (SSRMS), а также участвовать в поиске и спасении людей в чрезвычайных ситуациях.
Роботизированные технологии приобретают все большую популярность в медицинской отрасли. Многочисленные роботические системы были предложены для помощи инвалидам и пожилым людям. Автоматические программируемые инвалидные кресла облегчают жизнь пациентам с частичной или полной утратой способности передвижения. Для помощи пожилым пациентам разработан целый ряд роботизированных устройств, способных не только напомнить о необходимости своевременного приема лекарственного средства (Nursebot) 3-5 , но и заменить доктора у постели больного (RP-6 robot). 6 При этом специалист общается с пациентом посредством интернет- технологий.
Существует целый ряд роботических решений для применения в системе здравоохранения без непосредственного контакта с пациентами. К ним относятся лабораторные и транспортные системы. 7,8 Роботизированные лабораторные комплексы способны обеспечить бесперебойное функционирование многопрофильного учреждения с минимальной затратой человеческих ресурсов, что, несомненно, является экономически выгодным аспектом. 9
История развития хирургических роботических систем начинается с использования в нейрохирургической манипуляции в 1985 г. системы Programmable Universal Manipulation Arm (PUMA) 560 для выполнения точечной биопсии головного мозга под КТ-наведением. 10 К настоящему времени применение данной технологии прекращено по соображениям безопасности.
В 1988 г. для выполнения автоматизированной трансуретральной резекции простаты (ТУРП) была разработана роботическая система Probot. В том же году была выполнена первая ТУРП. Для этого в предоперационном периоде была сконструирована 3D-модель простаты, края резекции были очерчены хирургом, а траектории движения резектоскопа рассчитаны роботической системой. 11
Robodoc (IBM) стала первой роботической системой, предложенной для применения в ортопедии при протезировании тазобедренных суставов. 12 В последующем появлялись более усовершенствованные модели, обладающие способностью в автоматическом режиме выполнять необходимые манипуляции для завершения процедуры замещения тазобедренного сустава (Caspar system, Acrobot) 13 (рис. 8).
К началу 1995 г. была разработана нейрохирургическая роботическая система Minerva, использующая данные динамического КТ, что позволяло вносить коррективы в ход процедуры в режиме реального времени. Однако необходимость нахождения пациента в аппарате КТ на протяжении всей манипуляции существенно ограничило применение системы. 14 К настоящему времени разработана хирургическая роботическая система Cyberknife для выполнения ультраточной лучевой терапии злокачественных новообразований головного мозга. Для достижения максимально возможной аккуратности при облучении используется технология пошаговой корреляции изображений дооперационного КТ и рентгеновских исследований, проводимых в ходе манипуляции в режиме реального времени. 15
Роботическая система AESOP препроводила лапароскопическую хирургию в эру робот-ассистированной. Система смогла полноценно заменить ассистента при выполнении различных операций, предоставляя одновременно хирургу идеальную видимость и точность движений. К 1999 г. более 80 000 оперативных вмешательств было выполнено с использованием технологии AESOP.
Компания Computer Motion разработала и представила роботическую систему ZEUS в 1990 г. Основана система на базе AESOP и обладает двумя подсистемами – хирурга и пациента. Подсистема хирурга состоит из консоли с видеомонитором и двумя рукоятками, контролирующими работу манипуляторов. Манипуляторы удерживают инструменты. Консоль хирурга может быть расположена в любом месте в пределах операционной. Подсистема пациента состоит из трех роботических рук, прикрепленных к операционному столу (рис. 9).
В последующем был предложен более эргономичный вариант, в котором присутствовала система AESOP для управления камерой. Компьютер во время операции следил за инструментами и передавал информацию камере для полноценной их визуализации. Более того, именно компьютерный интерфейс модифицировал движения рук хирурга в движение роботических манипуляторов.
Оптическая система была предоставлена компанией Karl Storz system (Karl Storz Endoscopy, Santa Barbara, CA). Для создания 3D-эффекта был предложен интересный подход. Две камеры (правая и левая) изолированно передавали сигнал со скоростью 30 кадров в секунду. Компьютер превращал их искусственно в 60 кадров в секунду и передавал их на монитор хирурга. Для работы хирург должен был надевать специальные очки, позволяющие воспринимать сигналы и модифицировать их в 3D-визуализацию.
Изначально хирургическая система ZEUS была создана для кардиохирургических манипуляций и лишь затем произошла ее валидизация в других специальностях (общая хирургия, гинекология и урология). Несмотря на работы, сообщающие об успешном выполнении серий кардиохирургических операций, система обладает целым рядом ограничений. Громоздкость системы создает выраженную сложность в формировании операционной. Неправильное расположение трокаров полностью блокирует выполнение всего оперативного вмешательства. Отсутствие тактильной чувствительности диктует хирургу необходимость полагаться на собственную интуицию в ряде моментов. При этом сами инструменты обладают лишь шестью степенями свободы. Самым главным ограничением является 3D-визуализация. Необходимость наличия специальных очков для преобразования 2D- в 3D-сигнал резко затрудняет выполнение операций. Более того, смоделированный компьютерным интерфейсом 2D-сигнал без очков выглядит размыто и не позволяет чувствовать себя комфортно ассистенту и хирургу при снятии очков. Но главным отличием системы ZEUS от других роботических систем является тот факт, что компания Computer Motion создала интегрированный роботический продукт для операционной вместо иммерсионного интуитивного интерфейса. Именно этот факт позволяет системе выступать лишь в качестве ассистента, а не как оперирующий хирург. Все попытки компании популяризировать свой продукт сошли на нет в 2003 г., когда компания Intuitive Surgical поглотила компанию Computer Motion, ознаменовав тем самым завершение времени существования хирургической роботической системы ZEUS.
Компании Intuitive Surgical Inc. (Sunnyvale, CA, USA) удалось выкупить создаваемый военными организациями прототип роботической системы для применения в гражданских целях. Результатом стало появление хирургической роботической системы da Vinci, основанной на принципах дистанционной телемедицины. В настоящее время система da Vinci является единственной подобной системой и неоспоримым лидером в области роботической хи- рургии. Система da Vinci состоит из трех компонентов:
1) консоль хирурга (рис. 10);
2) тележка пациента;
3) оптическая система.
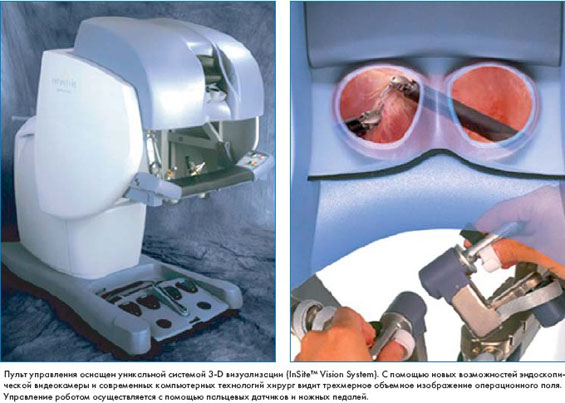
Консоль хирурга является панелью управления всей системы и местом работы оператора, осуществляющего управление тремя инструментами- манипуляторами и камерой тележки пациента при помощи двух джойстиков и ножных педалей (рис. 11).
Движения рук хирурга полностью копируются джойстиками и передаются на манипуляторы, нивелируя тремор и обеспечивая возможность прецизионной диссекции. Ножные педали обеспечивают активацию процесса коагуляции (система оснащена как монополярным, так и биполярным типом коа- гуляции), переключение между рабочими манипуляторами и камерой, а также фокусировку оптической системы. При помощи консоли хирург обладает возможностью удаленного управления системой, таким образом, консоль может быть расположена за пределами операционной.
Эффект присутствия обеспечивается оптической системой, состоящей из двух параллельных камер, передающих изолированное изображение для каждого глаза (рис. 12).
При этом передаваемое изображение является трехмерным, что позволяет хирургу определять объемное положение органов и тканей пациента в пространстве. Каждая камера оснащена собственным источником света, имеет собственную панель управления. Для получения реального 3D-изображения одним из компонентов высокотехнологичной оптической системы является синхронизатор, обеспечивающий равномерное восприятие изолированных сигналов обоими глазами хирурга. Связь хирурга с операционной обеспечивается при помощи микрофона и динамиков, расположенных как на консоли хирурга, так и на тележке пациента, находящегося в операционной.
Тележка пациента несет на себе рабочие манипуляторы и находится в непосредственном контакте с пациентом во время выполнения всей процедуры (рис. 13).
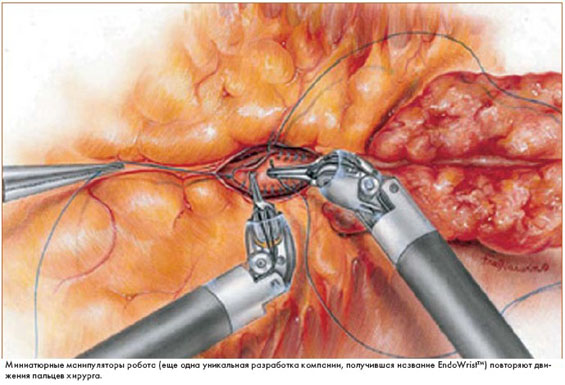
Три манипулятора с закрепленными на них инструментами, а также один манипулятор с камерой связаны с консолью хирурга при помощи компьютерного интерфейса. Во время подготовки тележки пациента к операции все манипуляторы одеваются в специальные стерильные чехлы и остаются в них на протяжении всей процедуры. Для выполнения роботической хирургии используются инструменты EndoWrist, созданные по образцу человеческого запястья и обладающие семиградусной свободой движения, превосходящие объем движений кисти человека. Набор инструментов EndoWrist включает разнообразие зажимов, иглодержателей, ножниц; монополярных и биполярных электрохирургических инструментов; скальпелей и других специализированных инструментов (всего более 40 типов). Инструменты EndoWrist могут иметь диаметр 5 или 8 мм. Важной особенностью является четкое ограничение использования инструментария. Каждый инструмент может быть применен лишь десять раз, при этом при смене инструментов интерфейс распознает тип нового инструмента и число его использований. Дополнительное оборудование, необходимое для выполнения оперативного пособия, располагается на стойке оборудования и включает в себя инсуфлятор, коагулятор, источник света, аспиратор и ирригатор. Также на стойке расположен допол- нительный монитор для ассистента и компоненты оптической системы.
Роботохирургия продолжает стремительно развиваться, завоевывая все большее и большее количество направлений в медицине. Стала реальностью так называемая трансконтинентальная телероботохирургия. В 2001 г. хирурги успешно удалили желчный пузырь с помощью дистанционно управляемой роботической системы, установленной в одном из госпиталей Франции, находясь от пациентки на расстоянии 7000 км в Нью-Йорке. Современные средства связи обеспечили передачу сигналов в обоих направлениях (от видеокамеры лапароскопа к хирургу и обратно – от станции управления к роботу) по трансатлантическому волоконно-оптическому кабелю. Задержка сигнала составляла менее 200 мсек (безопасно допустимое отставание сигнала составляет около 300 мсек) [26]. В настоящее время активно развивается трансоральная роботическая хирургия, хирургия головы и шеи, гинекологическая роботическая хирургия. К 2014 г. имеет место более чем 6000 публикаций, посвященных роботической хирургии, более 4000 систем da Vinci инсталлированы в более чем 1500 медицинских учреждениях по всему миру. В 2013 г. выполнено 350 000 роботических операций по всему миру, наиболее популярными из которых являются роботическая радикальная простатэктомия и роботическая гистерэктомия [27].
Будущее
Урологическая клиника Московского государственного медико-стоматологического университета им. А. И. Евдокимова, обладая наибольшим опытом проведения РРП в России, продолжает принимать активное участие в разработке отечественного робота, в результате чего стало возможным создание основных узлов и функционального макета роботической хирургической системы. Работа по данному направлению выполняется по заданию Минпромторга, что позволяет надеяться на успешное завершение проекта.
Продолжаем знакомить вас с миром робототехники. В этой статье мы рассказываем о том, как автоматизированные робототехнические системы, которым раньше место было лишь на фабриках и заводах, получили применение и развитие своих навыков в медицине, о реальных примерах такого применения, самом оборудовании, перспективах сотрудничества врачей и роботов.
Содержание
Как это начиналось

Пионером в этой области стал робот-хирург “da Vinci”, разработанный в конце 1980-х годов. В 2012 году с использованием этой системы было совершено порядка 200 тыс. операций. В 2018 году с помощью робота-ассистента была проведена первая успешная нейрохирургическая операция по удалению грыжи грудного отдела позвоночника с компрессией спинного мозга.
Роботы в медицине сейчас

Картинка медицинских роботов демонстрирует обязательное участие врачей в процессе. Но сегодня ученые трудятся над созданием более автономных роботов, которые могли бы работать при минимальной степени вмешательства людей в процесс. Насколько скоро роботы в медицине смогут заменить людей, можно предположить, взглянув на последние разработки ученых в этой сфере, речь о которых пойдет далее в статье.
Новые и перспективные разработки медицинских роботов

Какие же виды медицинских роботов актуальны в 2019? Предлагаем вашему вниманию небольшой обзор.
Роботы-ассистенты

Именно с них началась история роботов в медицине. Сегодня они становятся все более точными и универсальными. К примеру, робот легкой конструкции KUKA LBR Med оснащен сенсорной системой распознавания, что гарантирует безопасную работу девайса с человеком, простым контролем управления, специальным покрытием, которое соответствует самым высоким требованиям гигиены и стерильности. Этот робот - ценный медицинский помощник, которого можно задействовать в проведении эндоскопиии и биопсии, лазерного рассечения костей или введения транспедикулярных винтов.
Диагностические роботы

Практика показывает, что когда речь идет об обработке данных, компьютеры намного превосходят людей. Очередным доказательством этого тезиса является робот производства KUKA, принимающий участие в исследовательском проекте Высшей школы физкультуры и спорта в Кельне HaiLeg (High articulated intelligent Leg). Здесь он служит в качестве чувствительного пресса для ног, используемого для проведения ортопедических анализов.
Пациент упирается ступнями в специальную панель и оказывает на нее давление. Полученные данные сразу же передаются на компьютер, который их обрабатывает. На основе данных о вращении и силы мышц создается биомеханическая модель колена.

Терапевтические роботы

Современные роботы способны провести вакуумную, лазерную, лучевую, электро- и термотерапию, а также ряд других процедур.
Особого внимания заслуживает разработка робота для лучевой терапии компании KUKA. Одним из основных его преимуществ является способность смягчить движения опухоли, адаптируясь к дыхательным движениям пациента. Это означает, что последний подвергается значительно меньшему воздействию радиации.
Помимо прочего, роботы могут быть гораздо более заботливыми, чем кажутся на первый взгляд. Недавняя разработка компании Universal Robots робот-рука UR10 нашла свое применение в массажной терапии. Американский стартап Massage Robotics интегрирует UR10 в своего массажного робота по имени Алекс. Ожидается, что такое изобретение даже сможет поддерживать голосовое общение с людьми.
В этом году был опубликован патент немецкой компании KUKA на изобретение робота для иппотерапии. Устройство включает в себя седло с сенсорными датчиками, программируемое управление движением и устройство автоматического перемещения седла в соответствии с заданной траекторией движения. Иными словами, это робот, который имитирует движения лошади с одним большим преимуществом - абсолютная безопасность.
Биопринтеры

На фото: 3D-принтер печатающий живыми клетками Organ.Aut компании 3dbio
Подробнее о работающем в космосе 3D-биопринтере Орган.Авт читайте в нашем блоге.
3D-принтеры печатающие живыми тканями — тоже часть большого семейства робототехники. Биопринтеры уже способны печатать каркасы тканей, органов и гиперэластичных костей, модели плаценты, используя жидкий питательный субстрат с живыми клетками разных видов, гели, волокна, полимеры, керамику, металлы и другие материалы. Одним из самых широко известных производителей биопринтеров является EnvisionTEC. Компания выпустила несколько моделей биопринтеров, а именно EnvisionTEC 3D-Bioplotter Starter, EnvisionTEC 3D-Bioplotter Developer и EnvisionTEC 3D-Bioplotter Manufacturer.
Применение роботов в медицине: успешные примеры

Непрекращающиеся разработки и эксперименты ученых дают свои плоды и мы уже сегодня наблюдаем успешное внедрение робототехники в медицину. Ниже представлены лишь несколько впечатляющих примеров, которые не могут не удивить.
Лучевая терапия под управлением роботов KUKA и ACCURAY
Робот CyberKnife, созданный в результате партнерской работы компаний KUKA и ACCURAY используется для высокоточного лечения опухолей в ведущих центрах лучевой терапии по всему миру.
Вместо скальпеля хирург использует пучок рентгеновских лучей. Когда пациент лежит на операционном столе, этот луч направляется вокруг него роботизированной рукой, так что необходимая доза облучения концентрируется на месте опухоли. Система визуализации записывает положение опухоли и сообщает роботу о любом движении, которые затем нейтрализируются роботом. Таким образом, CyberKnife способен с высокой точностью поражать опухоли независимо от их расположения в теле, оставляя здоровые ткани без повреждений. Во время лечения с помощью CyberKnife пациент лежит на специальном столе, который также контролируется роботом. Более того, после такой процедуры нет необходимости госпитализировать пациента.
Ускоренная упаковка медикаментов на фармацевтических фабриках с помощью роботов Fanuc

Роботизация в медицине облегчает работу не только врачам, но и производителям фармацевтических препаратов. Упаковку лекарств компания TechLab доверила роботу производства FANUC. Первый опыт TechLab в области автоматизации заключался в тесном сотрудничестве с ESS Technologies для внедрения одного из первых роботов FANUC LR Mate M430 с управляемой рукой для захвата и перемещения предметов на конвейере упаковки фармацевтических препаратов. Робот использовался для загрузки предметов на подающий конвейер, который доставлял их к машине первичной упаковки. Это увеличило скорость упаковочной линии TechLab до 35 шт. / мин. и сократило количество необходимого персонала с семи-восьми операторов до двух.

Во второй фазе автоматизации TechLab установила роботизированную систему ESS TaskMate, включающую робот FANUC LR Mate 200iC с шестью осями и высокоскоростной дельта-робот FANUC M-1iA. Первый достает отдельные тестовые наборы из лотка из нержавеющей стали и помещает их на промежуточный конвейер; как только конвейер заполнен, второй робот подбирает детали по одной и подает их в правильном направлении в упаковочную машину. Комбинация двух роботов увеличила скорость упаковки препаратов до 90 шт. / мин., а это более чем в два раза.
Робот-транспортировщик от Hanwha и Yujin Robot

Здесь все просто: основная задача ко-робота облегчить работу медицинского персонала в больницах и домах престарелых, доставляя еду и лекарства пациентам, а грязную посуду на кухню. По словам производителя, медсестры должны больше времени проводить с пациентами, а не носиться с грязной посудой.
Еще один помощник от uFactory

Робот производства uFactory xArm имеет встроенное компьютерное зрение, легкий корпус из углепластика и многосуставный манипулятор. Робот может распознавать и сортировать предметы, например — таблетки или другие препараты, перемещать их, что позволяет использовать его в уходе за пациентами или в лаборатории и делает медицинским роботом-помощником.
Производство мединструментов

Впечатляющие результаты принес робот Universal Robots производителю медицинского оборудования Tegra Medical. Компания столкнулась с трудностями, а именно падением прибыли из-за роста расходов и снижения спроса со стороны клиентов. Проблема решилась благодаря внедрению на производстве трех роботов в виде рук от Universal Robots (UR10 и 2 UR5), вследствии чего производительность станков удвоилась, а штат операторов, работающих на полную ставку был сокращен на 11 человек. В результате компании удалось сократить расходы на производство и удовлетворить потребности клиентов.
Ускоренный анализ крови в лабораториях

Два робота UR5 впечатлили и сотрудников больницы Копенгагенского университета в Гентофте. Первый робот берет образец крови и помещает его в сканер штрих-кода. Камера видеонаблюдения фотографирует цвет шляпки винта, и робот направляет образец в одну из четырех стоек в соответствии с цветом. Второй робот отбирает образцы в стойке и помещает их в устройство подачи для центрифугирования и анализа. Роботы обрабатывают около 3000 образцов в день, 7-8 пробирок в минуту. Они позволили лаборатории вовремя справляться с работой без привлечения дополнительного персонала, несмотря на 20-процентное увеличение количества образцов крови на анализ. Более 90% результатов готовы менее чем через час после прибытия в лабораторию.
3D-печать в медицине

Любой 3D-принтер, по сути своей, является электромеханическим устройством с программным управлением, то есть также роботом, так что нельзя не упомянуть здесь и 3D-печать — относительно новую технологию, которая быстро становится необходимым компонентом многих открытий в сфере медицины.
Принтер EnvisionTEC Bioplotter - лучший 3D-принтер для применения в медицинских целях. Только в США принтер использовался лабораториями в более чем 150 научных исследованиях. Его уникальная способность - печатать, используя любой биосовместимый материал и объединять несколько материалов для создания целого предмета.
EnvisionTEC Bioplotter использовался для изготовления компонентов индивидуального протеза руки. Дизайнеры использовали поликапролактон для печати компонентов сустава, поскольку этот материал близок к хрящевой ткани. Есть также возможность, создавать более жесткие или гибкие компоненты протезов, используя разные материалы. Таким образом, использование 3D-печати в медицине обеспечивает быструю и недорогую альтернативу для создания индивидуального протезирования.
Используя методы, разработанные Shah Lab, врачи теперь могут печатать клетки для создания конструкции печени “в пробирке”, которая имплантируется в тело пациента и перерастает в полноразмерную функционирующую печень. Эта процедура устраняет необходимость в донорстве органов и, поскольку для печати используются собственные клетки пациента, значительно снижается вероятность отторжения.

3D-печать уже смогла добиться успеха в излечении “разбитых сердец”. Принтер EnvisionTEC был использован для создания створок аортального клапана сердца.

Используя преимущества технологий 3D-печати, врачи имеют возможность сканировать пациентов, чтобы выявить их индивидуальные проблемы, а затем использовать программное обеспечение 3D-дизайна для разработки и печати клапана, смоделированного точно в соответствии с размером, необходимым для пациента. Чтобы напечатать сердечный клапан, врачи используют EnvisionTEC Bioplotter для нанесения слоев чередующихся каркасы и поддерживающих материалов нужной формы. После завершения процесса печати клапан помещают в теплую воду для того, чтобы поддерживающего материала растворился. После этого врачи получают клапан, который можно сразу имплантировать пациенту или использовать для тестирования. Этот медицинский прорыв имеет большое значение для людей, страдающих заболеваниями сердечно-сосудистой системы.
Печать стоматологических кап

Капы, или элайнеры, создают огромную конкуренцию привычным брекетам в виду таких преимуществ как эстетика, удобство и здоровье зубов. Если ранее поставку кап приходилось подолгу ждать из-за границы, что негативно сказывалось на продолжительности и стоимости лечения, то с появлением оборудования для 3D-печати в отечественных клиниках все стало гораздо проще. Теперь напечатать капы для своих клиентов не составит большого труда.
Мы решили опробовать эффективность такого способа лечения и провести на себе эксперимент согласился основатель компании и директор по развитию Василий Киселев. Процесс исправления прикуса занял 6 месяцев, всего было использовано 16 пар элайнеров, напечатанных с помощью стереолитографического 3D-принтера Formlabs Form 2. Результат можете оценить сами.

Подробнее о кейсе читайте в нашей статье.
Примерная сумма запуска самостоятельного производства кап - от 500 000 руб.
Учитывая, что себестоимость одной пары кап для врача составляет около $5 (300 руб), а стоимость такого лечения для пациента 80 000- 300 000 руб., можно сделать вывод, что такие вложения должны окупиться после обслуживания первых 5-7 клиентов.
Заключение
Как мы видим, медицинская робототехника творит чудеса, а это значит, что совсем скоро индустрия медицины выйдет на совершенно другой уровень. Робототехника в медицине изменяет лечение уже сейчас, а нам остается лишь успевать наблюдать за очередными революционными открытиями и не отставать от прогресса.
Ищете роботов для лаборатории, клиники или медцентра? В Top 3D Shop вы найдете последние достижение робототехники, которые помогут облегчить и сделать эффективнее труд медперсонала и увеличить эффективность и рентабельность медицинских учреждений.
Подписывайтесь на наш телеграм-канал с отборными кейсами Роботизации и Автоматизации со всех уголков мира:
Читайте также: