
Компьютерное зрение доклад ted
Обновлено: 07.07.2024
Техника изготовления картин из ниток (String Art) на OpenCV
OpenCV: считывания картинки через imread()
Прежде чем проводить какие-нибудь манипуляции с изображением — его нужно предварительно считать из файла. В OpenCV для этого используется функция imread().
OpenCV — cравнение алгоритмов интерполяции при изменении размеров изображения
Изменение размеров (масштабирование / scaling) — это очень часто используемый метод при работе с изображениями.В OpenCV для выполнения этой задачи используется функция resize(). В C++: В Python:
Анонсирована версия OpenCV 4.0-alpha
Анонсирована новая версия популярной библиотеки компьютерного зрения — OpenCV 4.0-alpha. Первый промежуточный релиз OpenCV 4.0 gold ожидается в конце октября. Что нового: * все последние улучшения, оптимизации и исправления ошибок из ветки 3.4. * в модуль DNN, добавлен парсер ONNX. Он поддерживает различные нейронные сети, такие как AlexNet, Inception v2, Resnet, VGG и т. д.
Запись докладов с конференции: Мир глазами роботов
Конференция посвящена одной из самых сложных задач искусственного интеллекта — распознаванию объектов и построению образов. Все доклады рассказывают про использование технологий компьютерного зрения в робототехнике:
Детектирование объектов — нейросетевой подход
Построение тепловой карты уборки робота-пылесоса
Используя Python и библиотеку компьютерного зрения OpenCV, очень просто можно следить за тем, как именно робот-пылесос производит уборку помещения.
OpenCV demonstrator (GUI)
Программа-демонстратор, позволяет изучить возможности функционала открытой библиотеки компьютерного зрения — OpenCV без написания кода. Основана на OpenCV 3.0 и Gtkmm 3.0.
Вышла новая версия OpenCV 3.0
Увидел свет релиз новой версии самой популярной библиотеки компьютерного зрения — OpenCV — 3.0! Что нового: * ~1500 патчей,
Fei-Fei Li: Как мы учим компьютеры понимать изображения
Фей-Фей Ли (Fei-Fei Li) в своём выступлении на TED — рассказывает как она со своими коллегами создали огромную базу изображений ImageNet.
Arduino
Разделы
Преимуществ нет, за исключением читабельности: тип bool обычно имеет размер 1 байт, как и uint8_t. Думаю, компилятор в обоих случаях…
Добрый день! Я недавно начал изучать программирование под STM32 и ваши уроки просто бесценны! Хотел узнать зачем использовать переменную типа…
PORTB = (PORTB & 0b11100111) | (i & 0b00000011); А почему Вы обнуляете биты 3 и 4, а заполняете биты…
Не секрет, что ИИ проник во многие сферы жизни. Однако мы до сих пор не всегда понимаем, когда взаимодействуем с ним, и какие методы он использует. Как правило, в инструментах, связанных с фото или видео, применяется компьютерное зрение.
За последние годы компьютерное зрение стало основным драйвером ИИ. Технология широко используется во многих сферах, в том числе производстве, онлайн-торговле, сельском хозяйстве, автомобилестроении и медицине.
По оценкам, к 2022 году мировой рынок компьютерного зрения вырастет до $48,6 млрд. Еще в 2015 году он составлял всего $6,6 млрд.
История компьютерного зрения в целом повторяет историю ИИ: медленный старт, полный технических препятствий, за ним — взрывной рост, подкрепленный огромными объемами данных, после — быстрое распространение, и, наконец, озабоченность по поводу предвзятости и использования технологии. Разберемся, как оно работает, как используется, с какими проблемами справляется и какие ему еще предстоит решить.
Как работает компьютерное зрение
Технология позволяет компьютерам выполнять разнообразные задачи.
- Сегментация изображений (разделяет картинку на части и изучает каждую) и распознавание образов (находит повторы визуальных стимулов между изображениями).
- Классификация объектов (сортирует объекты, обнаруженные на изображении), отслеживание объектов (находит и отслеживает движущиеся объекты на видео) и обнаружение объектов (ищет и идентифицирует конкретные объекты на изображении).
- Распознавание лиц — усовершенствованная форма обнаружения объектов, которая может находить и идентифицировать человеческие лица.
Как упоминалось выше, компьютерное зрение — подраздел машинного обучения, и оно аналогичным образом использует нейросети, чтобы сортировать огромные объемы данных, пока не поймет, на что смотрит.
Конкретный пример использования компьютерного зрения — задача на разделение изображений мороженого и пиццы с пепперони. Система искусственного интеллекта получает множество фотографий с этими продуктами. Затем компьютер пропускает изображения через несколько уровней обработки, из которых состоит нейросеть, чтобы шаг за шагом отличить мороженое от пиццы.
Первые уровни оценивают базовые свойства, например линии или края между светлыми и темными частями изображений. Последующие уровни изучают более сложные детали — формы или даже грани.
Это работает, поскольку системы компьютерного зрения интерпретирует изображения или видео как группы пикселей, каждому из которых присвоено цветовое значение. Эти метки используются как входные данные, которые перерабатывает система при перемещении изображения по уровням нейросети.
Развитие компьютерного зрения
Как и машинное обучение, компьютерное зрение появилось в 1950-х годах. Тогда вычислительные мощности и доступ к данным были ограничены, поэтому требовалось проводить много операций вручную, а технология действовала с ошибками. Но это уже напоминало известное нам компьютерное зрение.
Еще в 1959 году было обнаружено, как эффективно первичная обработка учитывает основные свойства изображения, например линии или края. В том же году также была изобретена технология , которая позволила преобразовывать картинки в сетки чисел. Этот двоичный язык был понятен машинам, и они могли воспринимать записанные им изображения.
В течение следующих нескольких десятилетий новые технические достижения сделали компьютерное зрение возможным.
- Появилась технология компьютерного сканирования, которая впервые позволила машинам оцифровывать изображения, а затем — превращать двумерные изображения в трехмерные формы.
- В 1974 году создан алгоритм распознавания объектов, который мог воспринимать текст
- К 1982 году уже начало формироваться компьютерное зрение. В том же году один исследователь усовершенствовал иерархию обработки, а другой разработал раннюю версию нейросети.
К началу 2000-х гг. распознавание объектов вызывало особенно большой интерес. В 2010 году был опубликован ImageNet, набор с миллионами размеченных изображений, который дал толчок к развитию компьютерного зрения. Внезапно любой желающий мог получить доступ к огромному количеству готовых к использованию данных.
Большинство существующих систем компьютерного зрения были созданы на базе ImageNet. Но они по-прежнему содержали много ошибок. Все изменилось в 2012 году, когда модель AlexNet, которая использовала ImageNet, значительно снизила частоту ошибок при распознавании изображений, открыв современную область компьютерного зрения.
Предвзятость и проблемы компьютерного зрения
Стремясь быстрее воспользоваться набором данных, исследователи не задумывались, откуда появились изображения, кто их разметил, почему они размечены таким образом, каких изображений или меток не хватает, и как это отразится на работе, не говоря уже о влиянии на сообщество и жизни людей. Лишь в 2019 году было выявлено, как много предвзятости и некорректных меток присутствует в датасете.

Фото в тексте: marvent / Shutterstock
Предвзятость данных и алгоритмов — одна из ключевых проблем для ИИ в целом, но ее влияние особенно легко увидеть в некоторых приложениях, использующих компьютерное зрение.
Например, известно, что технология распознавания лиц позволяет неверно идентифицировать темнокожих, но ритейлеры все чаще используют ее в магазинах. Полиция США также широко ее применяет, что стало поводов для протестов и законодательного регулирования в нескольких городах и штатах.
Правила в целом являются новой проблемой для компьютерного зрения (и ИИ в целом). Ясно, что их будет больше (особенно если большая часть мира последует по пути Европейского союза), но пока точно неизвестно, как будут выглядеть такие правила. Поэтому исследователям и компаниям пока неясно, на что ориентироваться в данный момент.
Компьютерное зрение также сталкивается с некоторыми техническими проблемами. Его ограничивает оборудование, в том числе камеры и датчики. Кроме того, системы компьютерного зрения очень сложно масштабировать. И, как и все типы ИИ, они требуют огромных вычислительных мощностей (что дорого) и данных.
Как показывает вся история компьютерного зрения, хорошие данные, которые являются репрезентативными, беспристрастными и этично собранными, трудно найти — и невероятно утомительно размечать.
Вы можете изучить и скачать доклад-презентацию на тему Машинное зрение. Презентация на заданную тему содержит 16 слайдов. Для просмотра воспользуйтесь проигрывателем, если материал оказался полезным для Вас - поделитесь им с друзьями с помощью социальных кнопок и добавьте наш сайт презентаций в закладки!

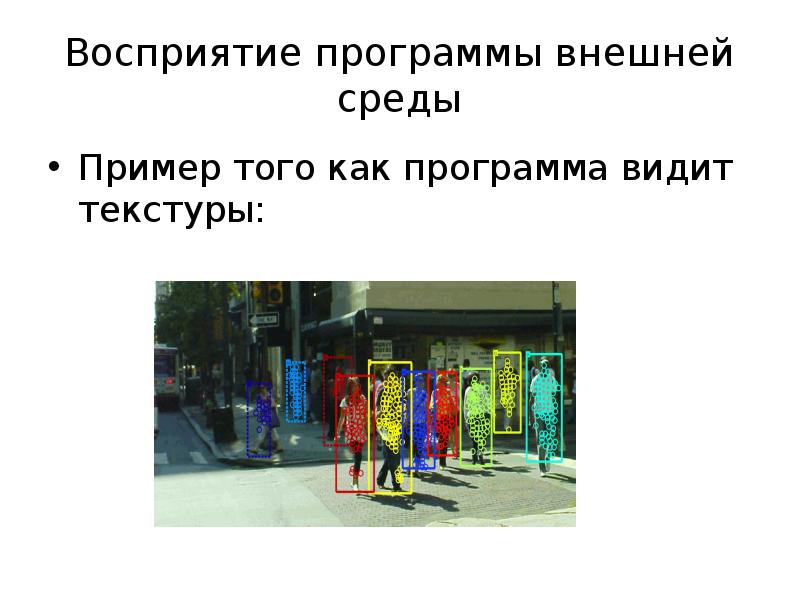


Машинное зрение в настоящее время Большое количество информации о внешнем мире человек получает по зрительному каналу и затем достаточно результативно обрабатывает эти данные посредством аппарата анализа и толкования визуальной информации. В связи с этим появляется вопрос о вероятности машинной реализации этого явления.
История развития машинного зрения Компьютерное зрение сформировалась как независимая дисциплина к концу 60-х годов. Это течение появилось в пределах искусственного интеллекта тогда, когда еще велись жаркие дискуссии о вероятности сотворения мыслящей машины. Оно появилось из трудов по распознаванию образов.
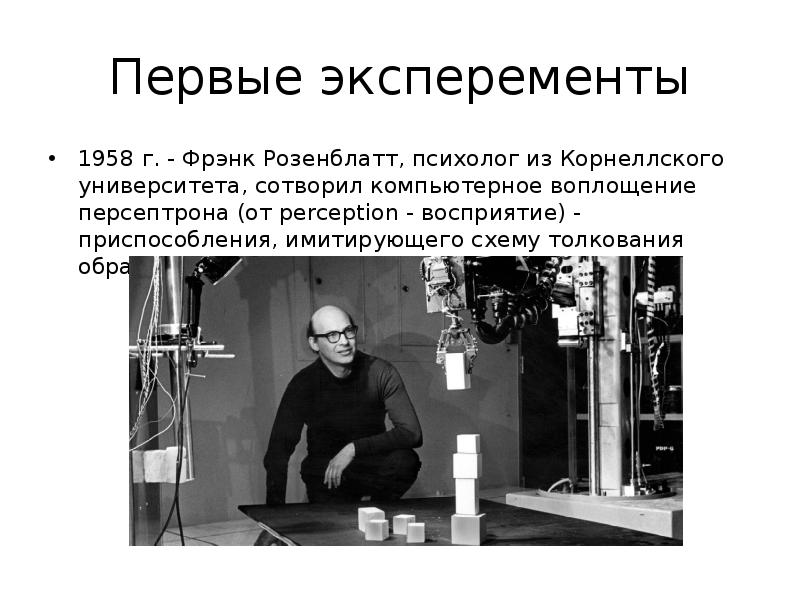
Первые эксперементы 1958 г. - Фрэнк Розенблатт, психолог из Корнеллского университета, сотворил компьютерное воплощение персептрона (от perception - восприятие) - приспособления, имитирующего схему толкования образов человеческим мозгом.
Персепторон Персептрон был впервые создан в 1958 году, вдобавок его подготовка занимала около получаса машинного времени на ЭВМ IBM-704. Аппаратный вариант - Mark I Perceptron - был сконстурирован в 1960 г. и применялся для толкования зрительных образов
Задачи машинного зрения и области его применения Машинное зрение - это применение компьютерного зрения для экономики и производства. Сферой интереса машинного зрения, как инженерного течения, можно назвать цифровые устройства ввода/вывода и компьютерные сети, предуготовленные для контролирования промышленной аппаратуры, такой как роботы-манипуляторы или приборы для отделения дефектных изделий.
Применение машинного зрения Машинное зрение применяется на производствах для проверки качества продукции
Функции машинного зрения Изучение машинного зрения подразумевает не лишь программное обеспечение, но и методы принятия аппаратного окружения и изображения, нужные для его применения. Потому оно разниться с компьютерным зрением, которое возникает во многих трудах на эту тему, чтобы стать областью будущего дизайна программного обеспечения.
3 Техническая составляющая машинного зрения Для решения перечисленных задач в системах машинного зрения применяются разнообразные технологии и методы. Ниже представлены главные методы обработки изображения: Выделение связанных областей: Связная область изображения – это, с одной стороны, тип объекта, все еще очень близко связанный с растровым изображением, и в то же время – это уже некая самостоятельная семантическая единица, позволяющая вести дальнейший геометрический, логический, топологический и любой другой анализ изображения. Счетчик пикселей: подсчитывает количество светлых или темных пикселей и на основе результата делает необходимые выводы об изображении.
Компьютерное зрение Не нужно путать машинное и компьютерное зрения. Компьютерное зрение является более общей областью исследований, тогда как машинное зрение является инженерной дисциплиной связанной с производственными задачами. Компьютерное зрение представляет собой научную дисциплину, изучающую теорию и базовые алгоритмы анализа изображений и сцен.
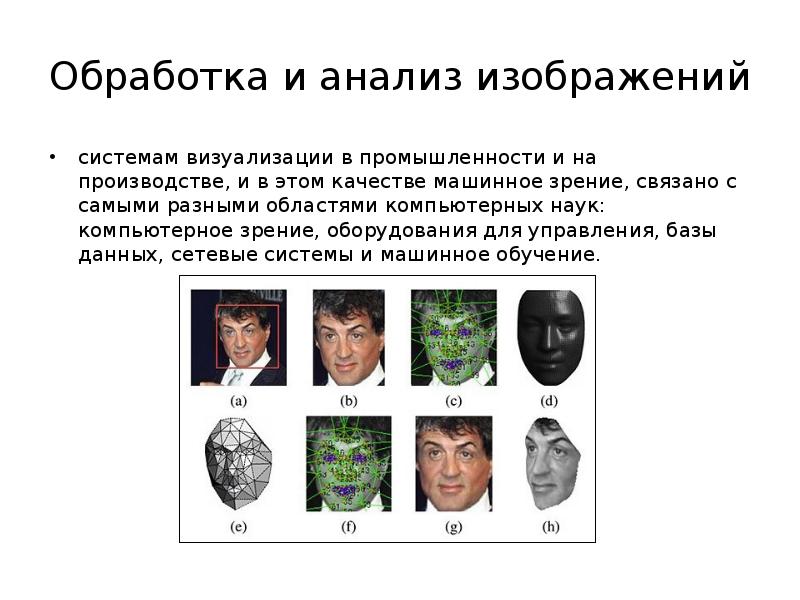
Обработка и анализ изображений системам визуализации в промышленности и на производстве, и в этом качестве машинное зрение, связано с самыми разными областями компьютерных наук: компьютерное зрение, оборудования для управления, базы данных, сетевые системы и машинное обучение.
Система обнаружения и сопровождения движущихся объектов по признаку их движения Автоматические и автоматизированные системы видеонаблюдения можно назвать одним из ключевых компонентов современных комплексных систем безопасности. Задача видеонаблюдения подразумевает визуальный контроль заданной области пространства при помощи одной или нескольких видеокамер, позволяющий сохранять и просматривать цифровые видеоданные, а также постоянно оценивать состояние контролируемой территории, выделяя так называемые охранные события.
Видеонаблюдение Сейчас охранное видеонаблюдение имеет два наиболее принципиальных направления развития - целый переход на цифровые системы видеонаблюдения и формирование функций видеоаналитики.
Итоговый слайд Машинное зрение Машинное зрение в настоящее время Восприятие программы внешней среды История развития машинного зрения Первые эксперименты Персептрон Задачи машинного зрения и области его применения Применение машинного зрения Функции машинного зрения Техническая составляющая машинного зрения Компьютерное зрение Обработка и анализ изображений Система обнаружения и сопровождения движущихся объектов п. Видеонаблюдение Машинное зрение
Компьютерное зрение — теория и технология создания машин, которые могут производить обнаружение, слежение и классификацию объектов.
Как научная дисциплина, компьютерное зрение относится к теории и технологии создания искусственных систем, которые получают информацию из изображений.
Вложенные файлы: 1 файл
Компьютерное зрение.docx
Компьютерное зрение — теория и технология создания машин, которые могут производить обнаружение, слежение и классификацию объектов.
Как научная дисциплина, компьютерное зрение относится к теории и технологии создания искусственных систем, которые получают информацию из изображений. Видеоданные могут быть представлены множеством форм, таких как видеопоследовательность, изображения с различных камер или трехмерными данными с медицинского сканера.
Как технологическая дисциплина, компьютерное зрение стремится применить теории и модели компьютерного зрения к созданию систем компьютерного зрения.
Удивительная сложность проблемы "понимания изображений" может быть объяснена тем обстоятельством, что её интеллектуальная (алгоритмическая) составляющая оказалась во многом более сложной, чем традиционные задачи типа компьютерной игры в шашки или шахматы, которые долгие годы служили полем приложения методов "искусственного интеллекта". Это связано со сложностью основного предмета, находящегося в центре внимания данной дисциплины, а именно – двумерного изображения. Скорее правилом, чем исключением является отсутствие у информационного семантического содержания изображения какой либо "причинной" или динамической модели формирования, в том смысле, что это информационное семантическое содержание возникает не под действием каких-либо физических законов, описывающихся математическими уравнениями. Информационное наполнение изображения проявляется в виде бесконечного разнообразия яркостно-геометрических структур, модели порождения которых могут просто отсутствовать. Особенно сложной задачей является "понимание" объектов, присутствующих в сцене наблюдения. Обнаружение и идентификация многих типов таких объектов, например, зданий и дорог на аэрофотоснимках превратились даже в отдельные направления исследований. Таким образом следует признать, что общая теория "понимания изображений" за последние 30-40 лет ещё не вышла из начального возраста, и то её состояние, которое может быть зафиксировано сегодня - это сочетание ряда нерешенных к настоящему моменту теоретических задач, с одной стороны, и большого числа идей и подходов, далеких от окончательного вида хорошо разработанной теории.
Методологические проблемы компьютерного зрения связаны с рядом требований к алгоритмам. Рассмотрим их на примере наиболее специфической группы алгоритмов – алгоритмов обнаружения объектов на изображениях. Итак, разрабатываемые алгоритмы, решающие прикладные задачи машинного зрения, должны работать на реальных изображениях. Вид объекта на изображении может значительно меняться. Факторами, влияющими на процесс обнаружения, могут быть и шумовые эффекты, имеющие десятки видов источников возникновения, и сложный текстурированный фон, и загораживание одних объектов другими. Кроме того, изображение может сильно меняться в зависимости от освещения, особенно в динамически меняющихся сценах.
Отсутствие формализованного описания ключевых факторов, вносящих неопределенность в процесс обработки, приводит к тому, что говорить о существовании единственного оптимального алгоритма для решения той или иной задачи обработки изображений будет невозможно еще многие годы. Представим себе, что существует несколько алгоритмов, достигающих примерно одинаковых результатов на "идеальных" изображениях. Тогда возникает естественный вопрос, как сравнить эти алгоритмы по качеству их работы. Признаком зрелости компьютерного зрения как дисциплины является возможность проверки алгоритмов на общедоступных наборах данных. В настоящее время существуют большие наборы данных (изображений, наборов трехмерных координат и пр.), специально разработанные учеными для этих целей. Проверка нового метода на данных является неизменным атрибутом хорошей статьи по компьютерному зрению. Поскольку для большинства задач не существует единственного оптимального решения, наборы тестовых данных создаются с учетом всего многообразия ситуаций. К примеру, для решения задачи поиска соответствующих точек на паре изображений используются геометрические искажения (поворот, сдвиг, перекос, изменение масштаба), фотометрические искажения (затемнение, пересвечивание), другие искажения (размытие, деформация), а также всевозможные комбинации искажений. В результате для вновь появляющихся алгоритмов сравнения изображений можно чётко ограничить набор условий, при которых, во-первых, новый алгоритм применим и, во-вторых, позволяет достичь более качественных результатов. Для поощрения открытости и обмена идеями в рамках конференций по компьютерному зрению и пониманию изображений периодически проводятся конкурсы. Группы ученых из разных стран соревнуются, чей алгоритм позволит лучше решить предъявленную задачу.
Алгоритмы, которые обладают устойчивостью к значительным искажениям и меняющимся факторам, принято называть робастными. Робастность следует отнести к основному практическому требованию при разработке алгоритмов обнаружения машинного зрения. Второе важнейшее свойство, которым должны, как правило, обладать алгоритмы обнаружения объектов на изображениях можно определить как точную локализацию. Это понятие означает, что необходимо не только обнаружить объект, но и точно указать в системе координат изображения (или сцены) его положение в каком-либо смысле. При локализации могут возникать два вида ошибок – нормальные и аномальные. Нормальная ошибка – это правильная локализация объекта с некоторой позиционной или параметрической неточностью, характеризуемой количественными оценками. К аномальным ошибкам следует отнести ситуацию перепутывания объектов или возникновение артефактов, что связано с фатальными количественными ошибками позиционирования или просто ложным обнаружением. Требования по исключению или ограничению уровня аномальных ошибок составляют очень важную часть требований к алгоритмам обнаружения.
В 1981 был создан метод отбраковки аномальных данных (выбросов) RANSAC. Его главным достоинством является возможность отделить ложные измерения от истинных. Идеи, лежащие в основе метода, были известны и раньше среди математиков, занимающихся статистикой, однако не получили в той области развития в силу специфики решаемых статистикой задач. В то же время, метод RANSAC получил признание среди исследователей компьютерного зрения и сейчас является одним из столпов этой дисциплины. Основная идея состоит в следующем:
- Из всех имеющихся измерений, большая часть из которых ошибочна, выбрать случайным образом некоторое минимальное количество.
- На основании небольшого количества измерений построить гипотезу (модель), наилучшим образом объясняющую эти измерения.
- Проверить гипотезу на ВСЕХ имеющихся измерениях. Те из них, которые плохо объясняются гипотезой, объявить ошибочными.
- Пройти шаги 1-3 много раз и выбрать ту гипотезу, которая в согласии с максимальным количеством измерений.
С позиций принципа фальсификации шаг 3 кажется неправомерным, поскольку в методе RANSAC при появлении фактов, противоречащих принятой на данный момент гипотезе отбрасываются факты, а не гипотеза. Но следует помнить, что мы имеем дело с ситуацией, когда ряд измерений (фактов) опровергает принятую гипотезу не в силу ложности гипотезы, а в силу ложности самих фактов. Противоречие шага 3 частично устраняется шагом 4, поскольку в качестве истинной принимается (методом голосования) та гипотеза, которая не противоречит наибольшему числу наблюдений.
Читайте также: