
В чем состоит принцип освобождаемости твердого тела от связей в технической механике кратко ответ
Обновлено: 04.07.2024
Механическое движение - это происходящий во времени процесс изменения положения одних тел относительно других (их взаимная неподвижность – относительный покой - рассматривается как частный случай).
Механическое взаимодействие– это явление, при котором одно тело порождает изменение механического состояния второго (изменяет его скорость, или форму – по причине появляющихся деформаций).
Теоретическая механика – это наука о наиболее общих законах механического движения и взаимодействия тел.
Периодов развития механики:
1. Донаучный;2. Элементарный;3. Период формирования современных понятий и формулировок законов;4. Период триумфального шествия теорий механического движения и преувеличения их значимости в вопросах познания окружающего мира 5. Период формирования теоретических основ различных прикладных вопросов механики 6. Современный период – характеризуется появлением мощного метода исследований с помощью компьютерной техники, позволившей существенно расширить классы решаемых практических задач.
1. Матер.точка-это тело, размерами которого в условиях конкретной задачи можно принебреч.
2. Механическая система- любая совокупность матер. Точек.
3. Матер. Тело- механич. Система образов. Непрерывной совокупностью матер точек.
4. Твердое тело- метер. Тело расстояние между любыми точками которого остаеться неизменноыми.
5. Сила- векторная величина явл.мерой механич. Действия одного тела на другое.
6. Линия действия силы- прямая на которой направлена сила.
7. Система сил- любая совокупность сил действующих на механич. Систему.
8. Эквивалентные системы сил- системы сил под действием каждой из которых твердое тело будет находиться в одинаковом кинетич. Состоянии.
9. Уравновеш. Система сил- система сил которая будучи приложена к телу не меняет его кинетич. Состояние.
10. Силы действ. На механич. Систему деляться: внешние(силы действ. На матер.точки рассматриваемой системы со стороны матер. Точек не пренадлежащих рассматриваемой системе) и внутренние(силы взаимод. Между матер. Точками расматриваемой системы.)
11. Плечё- кратчайшее расстояние от указанной точки до линии действия силы.
Введение в статику. Предмет статики. Основные задачи статики. Основные понятия статики.
Предмет изучения и основные задачи статики
Статика – это часть теоретической механики, в которой вводят количественные характеристики механических действий (сила, момент, силовой винт и т.д.) и изучают связи между ними.
Основные учебные задачи статики– изучение законов и методов, с помощью которых можно: 1) определять действующие на тела неизвестные силы; 2) преобразовывать одни системы сил в другие.
Основные понятия статики: За материальную точку принимают такое тело, размеры которого малы по сравнению со смежными телами.
Абсолютно твердым телом в теоретической механике называют такое тело, расстояние между двумя любыми точками которого остается неизменным при любых силовых воздействиях, то есть тело не
деформируется.
Силойназывается физическая величина, появляющаяся при взаимодействии тел или физических полей и определяется по появлению деформаций или ускорений.
Совокупность сил, действующих на какое-либо тело, называется системой сил.
Проекция силы на ось. Момент силы относительно точки и оси.
Понятие о проекции силы на ось-есть алгебраич. Величина равная произведению модуля вектора силы на cos угла между этим вектором и полож. Направлен.оси.
F1x=f1cosальфа
Момент силы относительно точки и оси
Момент силы относительно точки О - это вектор, модуль которого равен произведению модуля силы на плечо - кратчайшее расстояние от точки О до линии действия силы. Направление вектора момента силы перпендикулярно плоскости, проходящей через точку и линию действия силы, так, что глядя по направлению вектора момента, вращение, совершаемое силой вокруг точки О, происходит по часовой стрелке.

M(F)=Fq*h=F*cos альфа*h
Аксиомы статики.
Аксиома I(об абсолютно твердом теле). Две силы, приложенные к свободному абсолютно твердому телу, взаимно уравновешиваются тогда и только тогда, когда они равны по модулю (F1=F2) и направлены вдоль общей линии действия в противоположные стороны (рис. 18):
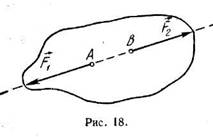
Эта аксиома справедлива только для абсолютно твердого тела. Она определяет простейшую уравновешенную систему сил, так как опыт показывает, что свободное тело, на которое действует только одна сила, находиться в равновесии не может.
Аксиома II.(О присоединении и отбрасывании уравновешивающихся сил). Действие данной системы сил на тело не изменится, если к ней прибавить или от нее отнять уравновешенную систему сил.
Аксиома III (аксиома параллелограмма сил). Равнодействующая двух сил у приложенных к твердому телу в одной точке и направленных под углом друг к другу, приложена в той же точке и изображается по величине и направлению диагональю параллелограмма, построенного на данных силах как на двух сторонах
Вектор , равный диагонали параллелограмма, построенного на векторах 1и 2 (рис. 20), называется геометрической суммой векторов 1и 2:
= 1+ 2
Аксиома IV. Силы, возникающие при действии двух тел друг на друга, всегда равнымежду собой по модулю и действуют по одной прямой в противоположные стороны (III закон Ньютона или закон равенства действия и противодействия).
Аксиома V (принцип отвердевания). Равновесие изменяемого (деформируемого) тела, находящегося под действием данной системы сил, не нарушится, если тело отвердеет (станет абсолютно твердым).
Связи и их реакции. Принцип освобождаемости от связей.
Принцип освобождаемости от связей: с точки зрения установления правильных математических зависимостей между силами, любое несвободное тело можно рассматривать как свободное - отделённое от связей, но к которому приложены их реакции,
Связи и их реакции

Шарнирно-неподвижная опора может изображаться по-разному (рисунок 1.3, а или 1.3, б
Шарнирно-подвижная опора (рисунок 1.4, а)

Соединение стержня и втулки в плоскости (рисунок 1.6) – скользящая заделка. Отбросим втулку – получим действие на стержень силы RD и MD момента.

Консоль (глухая или жесткая заделка) не допускает никакого перемещения детали. Реакцией такой опоры являются неизвестная по величине и направлению сила RA с углом α (или XA и YA ) и момент ΜA (рисунок 1.8).

Предмет теоретической механики. Этапы развития. Основные понятия тер.меха.
Механическое движение - это происходящий во времени процесс изменения положения одних тел относительно других (их взаимная неподвижность – относительный покой - рассматривается как частный случай).
Механическое взаимодействие– это явление, при котором одно тело порождает изменение механического состояния второго (изменяет его скорость, или форму – по причине появляющихся деформаций).
Теоретическая механика – это наука о наиболее общих законах механического движения и взаимодействия тел.
Периодов развития механики:
1. Донаучный;2. Элементарный;3. Период формирования современных понятий и формулировок законов;4. Период триумфального шествия теорий механического движения и преувеличения их значимости в вопросах познания окружающего мира 5. Период формирования теоретических основ различных прикладных вопросов механики 6. Современный период – характеризуется появлением мощного метода исследований с помощью компьютерной техники, позволившей существенно расширить классы решаемых практических задач.
1. Матер.точка-это тело, размерами которого в условиях конкретной задачи можно принебреч.
2. Механическая система- любая совокупность матер. Точек.
3. Матер. Тело- механич. Система образов. Непрерывной совокупностью матер точек.
4. Твердое тело- метер. Тело расстояние между любыми точками которого остаеться неизменноыми.
5. Сила- векторная величина явл.мерой механич. Действия одного тела на другое.
6. Линия действия силы- прямая на которой направлена сила.
7. Система сил- любая совокупность сил действующих на механич. Систему.
8. Эквивалентные системы сил- системы сил под действием каждой из которых твердое тело будет находиться в одинаковом кинетич. Состоянии.
9. Уравновеш. Система сил- система сил которая будучи приложена к телу не меняет его кинетич. Состояние.
10. Силы действ. На механич. Систему деляться: внешние(силы действ. На матер.точки рассматриваемой системы со стороны матер. Точек не пренадлежащих рассматриваемой системе) и внутренние(силы взаимод. Между матер. Точками расматриваемой системы.)
11. Плечё- кратчайшее расстояние от указанной точки до линии действия силы.
Введение в статику. Предмет статики. Основные задачи статики. Основные понятия статики.
Предмет изучения и основные задачи статики
Статика – это часть теоретической механики, в которой вводят количественные характеристики механических действий (сила, момент, силовой винт и т.д.) и изучают связи между ними.
Основные учебные задачи статики– изучение законов и методов, с помощью которых можно: 1) определять действующие на тела неизвестные силы; 2) преобразовывать одни системы сил в другие.
Основные понятия статики: За материальную точку принимают такое тело, размеры которого малы по сравнению со смежными телами.
Абсолютно твердым телом в теоретической механике называют такое тело, расстояние между двумя любыми точками которого остается неизменным при любых силовых воздействиях, то есть тело не
деформируется.
Силойназывается физическая величина, появляющаяся при взаимодействии тел или физических полей и определяется по появлению деформаций или ускорений.
Совокупность сил, действующих на какое-либо тело, называется системой сил.
Проекция силы на ось. Момент силы относительно точки и оси.
Понятие о проекции силы на ось-есть алгебраич. Величина равная произведению модуля вектора силы на cos угла между этим вектором и полож. Направлен.оси.
F1x=f1cosальфа
Момент силы относительно точки и оси
Момент силы относительно точки О - это вектор, модуль которого равен произведению модуля силы на плечо - кратчайшее расстояние от точки О до линии действия силы. Направление вектора момента силы перпендикулярно плоскости, проходящей через точку и линию действия силы, так, что глядя по направлению вектора момента, вращение, совершаемое силой вокруг точки О, происходит по часовой стрелке.
M(F)=Fq*h=F*cos альфа*h
Аксиомы статики.
Аксиома I(об абсолютно твердом теле). Две силы, приложенные к свободному абсолютно твердому телу, взаимно уравновешиваются тогда и только тогда, когда они равны по модулю (F1=F2) и направлены вдоль общей линии действия в противоположные стороны (рис. 18):
Эта аксиома справедлива только для абсолютно твердого тела. Она определяет простейшую уравновешенную систему сил, так как опыт показывает, что свободное тело, на которое действует только одна сила, находиться в равновесии не может.
Аксиома II.(О присоединении и отбрасывании уравновешивающихся сил). Действие данной системы сил на тело не изменится, если к ней прибавить или от нее отнять уравновешенную систему сил.
Аксиома III (аксиома параллелограмма сил). Равнодействующая двух сил у приложенных к твердому телу в одной точке и направленных под углом друг к другу, приложена в той же точке и изображается по величине и направлению диагональю параллелограмма, построенного на данных силах как на двух сторонах
Вектор , равный диагонали параллелограмма, построенного на векторах 1и 2 (рис. 20), называется геометрической суммой векторов 1и 2:
= 1+ 2
Аксиома IV. Силы, возникающие при действии двух тел друг на друга, всегда равнымежду собой по модулю и действуют по одной прямой в противоположные стороны (III закон Ньютона или закон равенства действия и противодействия).
Аксиома V (принцип отвердевания). Равновесие изменяемого (деформируемого) тела, находящегося под действием данной системы сил, не нарушится, если тело отвердеет (станет абсолютно твердым).
Связи и их реакции. Принцип освобождаемости от связей.
Принцип освобождаемости от связей: с точки зрения установления правильных математических зависимостей между силами, любое несвободное тело можно рассматривать как свободное - отделённое от связей, но к которому приложены их реакции,
Связи и их реакции
Шарнирно-неподвижная опора может изображаться по-разному (рисунок 1.3, а или 1.3, б
Шарнирно-подвижная опора (рисунок 1.4, а)
Соединение стержня и втулки в плоскости (рисунок 1.6) – скользящая заделка. Отбросим втулку – получим действие на стержень силы RD и MD момента.
Консоль (глухая или жесткая заделка) не допускает никакого перемещения детали. Реакцией такой опоры являются неизвестная по величине и направлению сила RA с углом α (или XA и YA ) и момент ΜA (рисунок 1.8).

Как уже упоминалось в предыдущих статьях, статика изучает условия, при которых тела и материальные точки находятся в состоянии равновесия. Казалось бы, благодаря аксиомам статики, описывающим основные свойства силового взаимодействия между телами, решение задач равновесия тел не должно представлять трудностей - неизвестные силы можно найти, зная, что они должны уравновешиваться известными силами, отсюда и ключ к решению.
Тем не менее, основная сложность при расчетах заключается в том, что силы - векторные величины, и для решения задач необходимо знать не только их скалярные размерности (модули) , но и направление в пространстве, а также точки приложения. В результате получается, что каждая неизвестная сила содержит три вопроса: куда она направлена, где приложена, и какова ее величина?
Исключить некоторые неизвестные составляющие сил помогает анализ связей между телами. Как мы уже знаем, все тела и материальные точки подразделяются на свободные и связанные (несвободные) . В статике чаще всего приходится решать задачи, в которых рассматривается условие равновесия связанных тел, т. е. имеющих некоторые (или полные) ограничения на перемещение в пространстве относительно других тел.
Эти ограничения называются связями.
Примерами связей, ограничивающих перемещение тела, может послужить поверхность или какая-либо опора, на которой лежит тело, жесткая заделка части тела в массив, исключающая любое его перемещение, а также гибкие и шарнирные связи, частично ограничивающие возможность тела перемещаться в пространстве.
Анализ таких связей позволяет понять, какие силовые факторы возникают в них при противодействии перемещению связанного тела. Эти силовые факторы называют силами реакции или реакциями связей (обычно их называют просто реакциями) .
Силы, которыми тело воздействует (давит) на связи называют силами давления.
Следует отметить, что силы реакций и давлений приложены к различным телам, поэтому не представляют собой систему сил.
Силы, действующие на любое тело можно разделить на активные и реактивные.
Активные силы стремятся перемещать тело, к которому они приложены, в пространстве, а реактивные силы - препятствуют этому перемещению. Силы реакции связей относятся к реактивным силам.
Принципиальное отличие активных сил от реактивных заключается в том, что величина реактивных сил зависит от величины активных сил, но не наоборот. Активные силы часто называют нагрузками.
При решении большинства задач статики несвободное тело условно изображают как свободное с помощью так называемого принципа освобождаемости, который формулируется следующим образом: всякое несвободное (связанное) тело можно рассматривать как свободное, если отбросить связи и заменить их реакциями.
Типичные связи тел и их реакции
Рассмотрим наиболее часто встречающиеся связи, а также возникающие в них реакции при приложении нагрузок.
Идеально гладкая плоскость

Реакция идеально гладкой плоскости направлена перпендикулярно опорной плоскости в сторону тела, так как такая связь не дает телу перемещаться лишь в одном направлении - в сторону опорной плоскости, т. е. перпендикулярно ей (см. рисунок 1,а) .
Если же тело находится на наклонной плоскости, то силу его тяжести G можно разложить на две составляющие, из которых одна будет направлена параллельно плоскости (Xa), другая - перпендикулярно ей (Ya). При этом первая сила будет стремиться передвигать тело по плоскости в сторону уклона, а вторая - прижимать его к плоскости (см. рисунок 1,б) .
Реакция наклонной плоскости будет равна по модулю составляющей, перпендикулярной плоскости и направлена в сторону, противоположную этой составляющей, уравновешивая ее. Если тело касается плоскости одной точкой (например, шар или угол) , то реакция будет приложена к этой точке тела.
В других случаях, когда тело касается плоскости некоторой поверхностью, имеет место взаимодействие посредством нагрузки, распределенной по этой поверхности (распределенной нагрузки).
Идеально гладкая поверхность
Идеально гладкая поверхность (отличается от плоскости криволинейностью) реагирует перпендикулярно касательной плоскости, т. е. по нормали к опорной поверхности в сторону тела, так как нормаль - единственное направление перемещения тела, которое не допускает данная связь (см. рисунок 1,в) .
Закрепленная точка или ребро угла
В случае, если перемещение тела ограничивается закрепленной точкой или ребром угла, реакция связи направлена по нормали к поверхности идеально гладкого тела в сторону тела, так как нормаль к поверхности тела - единственное направление, движение в котором ограничено этим видом связи (см. рисунок 1,г) .
Гибкая связь
Реакция гибкой связи (гибкая нить) не дает телу удаляться от точки подвеса и поэтому направлена вдоль связи от тела к точке подвеса, т. е. известны точка приложения реакции гибкой связи и ее направление. На рисунке 2 изображена гибкая связь, служащая связующим звеном между двумя стержнями и телом.
В конструкциях широкое распространение имеют связи, которые называются шарнирами. Шарнир представляет собой подвижное соединение двух тел (деталей) , допускающее только вращение вокруг общей точки (шаровой шарнир) или вокруг общей оси (цилиндрический шарнир) . Рассмотрим, какие реакции возникают при связывании тела с помощью шарниров.
Идеально гладкий цилиндрический шарнир

При связывании тела цилиндрическим шарниром возможно его перемещение вдоль оси шарнира и вращение относительно этой оси. Реакция цилиндрического шарнира расположена в плоскости, перпендикулярной его оси и пересекает эту ось. Направление вектора реакции шарнира на этой плоскости зависит от направления вектора нагрузки.
Примером цилиндрического шарнира может послужить обыкновенный подшипник качения.
Идеально гладкий шаровой шарнир
В этом случае заранее известно лишь то, что реакция проходит через центр шарнира, так как тело, связанное шаровым шарниром, может поворачиваться в любом направлении относительно оси шарнира, но не может совершать никаких линейных перемещений в пространстве, т. е. удаляться от центра шарнира или приближаться к нему.
Идеально гладкий подпятник
Подпятник можно рассматривать, как сочетание цилиндрического шарнира и опорной плоскости, поэтому реакция подпятника считается состоящей из двух составляющих: Xa и Ya . При этом одна из реакций будет направлена вдоль нормали к опоре в сторону тела (как у опорной плоскости), другая - перпендикулярно оси подпятника (как у цилиндрического шарнира) .
Полная реакция подпятника будет равна векторной сумме этих составляющих: Ra = Xa +Ya.
Стержень, закрепленный шарнирно
Стержень, закрепленный двумя концами в идеально гладких шарнирах и нагруженный концами (рис. 2) , реагирует только по линии, соединяющей оси шарниров, т. е. вдоль своей оси (согласно III аксиоме статики) . При этом реакция стержня может быть направлена и к центру шарнира (точке крепления) , и от него (в зависимости от направления нагрузки) , поскольку этот вид связи удерживает тело на фиксированном расстоянии, не позволяя ему удаляться или приближаться. Этим стержень принципиально отличается от гибкой связи, у которой реакция всегда направлена от точки крепления в сторону связи (гибкая связь удерживает тело только от удаления, не запрещая ему приближаться к точке крепления) .
Жесткая заделка

Этот вид связи полностью лишает тело возможности перемещаться в любом направлении и вращаться относительно какой-либо оси или точки.
При жесткой заделке тела ( рис. 3 ) в опоре возникает не только реактивная сила RA , но и реактивный момент МA .
Жесткая заделка является "темной лошадкой" при вычислениях, поскольку изначально ни направление реакций, ни их величина неизвестны, особенно если нагрузка представлена системой сил. Тем не менее, используя разложение активных сил на составляющие, последовательно можно определить и реактивную силу RA , и реактивный момент MA , действующие в жесткой заделке.
В случае, если тело связано не только жесткой заделкой, но и другим видом связи, задача становится нерешимой обычными методами статики, поскольку неизвестных реакций больше, чем возможное количество уравнений равновесия.
Пример решения задачи по определению реакций жесткой заделки приведен на этой странице.
Понятие бруса и балки в технической механике
В статике нередко приходится решать задачи на условие равновесия элементов конструкций, называемых брусьями.
Брусом принято считать твердое тело, у которого длина значительное больше поперечных размеров. Осью бруса считается геометрическое место (множество) центров тяжести всех поперечных сечений этого бруса.
Брус с прямолинейной осью, положенный на опоры и изгибаемый приложенными к нему нагрузками, называют балкой.

Указания содержат материал для и самостоятельной подготовки студентовк аудиторной контрольной работе.
Ответственный за выпуск П.Н. Громыко
Технический редактор А.А. Подошевко
Компьютерная верстка Н.П. Полевничая
Подписано в печать . Формат 60х84 /16. Бумага офсетная. Гарнитура Таймс.
Печать трафаретная. Усл.- печ. л. . Уч.-изд. л. .Тираж __ экз. Заказ №
Издатель и полиграфическое исполнение
Государственное учреждение высшего профессионального образования
© ГУ ВПО «Белорусско-Российский
ОГЛАВЛЕНИЕ
1.1 Понятия предмета теоретическая механика. 5
1.2 Аксиомы статики. 6
1.3 Связи и их реакции. Принцип освобождаемости от связей. 7
1.4 Проекции силы на ось и на плоскость. 10
1.4. Условия равновесия системы сходящихся сил. Теорема о равновесии трех непараллельных сил. 11
1.5 Момент силы относительно точки. 12
1.7 Приведение системы сил, произвольно расположенных на плоскости, к заданному центру. Теорема Вариньона. 15
1.8 Условия и уравнения равновесия системы сил, произвольно расположенных на плоскости. Теорема Вариньона. 17
1.9 Сосредоточенные и распределеные силы.. 18
1.10 Момент силы относительно оси. 20
1.11 Равновесие системы сил, расположенных в пространстве. Случай параллельных сил 21
1.12 Равновесие сочлененных систем тел. 22
1.13 Равновесие тел при наличии трения скольжения. 22
1.14 Равновесие тела при наличии трения качения. 22
1.15 Расчет ферм. 22
СПИСОК ИСПОЛЬЗОВАННЫХ ИСТОЧНИКОВ.. 22
ВВЕДЕНИЕ
Статика
Понятия предмета теоретическая механика
Теоретическая механика – дисциплина фундаментальная. С необходимостью применять содержащиеся в ней знания приходится постоянно сталкиваться не только на производствах, но и в быту; не только инженерам, но и гуманитариям.
Без знания теоретической механики невозможно качественно изучать сопротивление материалов, детали машин, теорию механизмов и машин, подъёмные и транспортные устройства и ряд других учебных предметов.
При изучении данного курса приследуется цель: помочь будущему специалисту освоить минимум содержащихся в теоретической механике знаний.
Современная техника ставит перед инженерами множество задач, решение которых связано с исследованием механического движения и механического взаимодействия материальных тел.
Механическим движением называют происходящее с течением времени изменение взаимного положения материальных тел или их частей в пространстве. Под механическим взаимодействием понимают те действия материальных тел друг на друга, в результате которых происходит изменение положения этих тел в пространстве или изменение их формы (деформация).
Теоретическая механика –наука, в которой изучают наиболее общие законы механического движения и механического взаимодействия.
В основе теоретической механики лежат законыклассической механики (законы Ньютона), которые установлены путем обобщения результатов многочисленных опытов и наблюдений, нашедшие подтверждение в процессе всей общественно-производственной практики человечества.
Теоретическая механика состоит из трех основных частей: статики, кинематики и динамики.
Статика изучает законы равновесия материальных тел и способы преобразования систем сил из сложных в более простые.
Кинематика изучает движение материальных тел с геометрической точки зрения, т.е. без учета сил, вызывающих эти движения.
Динамика изучает движение материальных тел с учетом сил, вызывающих эти движения и массы тел.
Для изучения теоретической механики необходимо владеть элементарной и высшей математикой, основами физики и начертательной геометрии.
Аксиомы статики
Аксиома инерции. Под действием уравновешенной системы сил материальная точка (тело) находится в состоянии покоя или движется равномерно и прямолинейно.
Аксиома равновесия двух сил. Если тело находится в равновесии под действием двух сил (рис.1.1), то эти силы равны по величине, действуют по одной прямой и направлены в противоположные стороны.

Аксиома присоединения или исключения уравновешенной системы сил. Действие системы сил на твердое тело не изменится, если к ней присоединить или из нее исключить систему уравновешенных сил.
Следствие: не нарушая состояния тела, точку приложения силы можно переносить вдоль линии её действия на любое расстояние.
Аксиома параллелограмма сил. Равнодействующая двух пересекающихся сил (рис.1.2) проходит через точку их пересечения и изображается диагональю параллелограмма, построенного на этих силах, как на сторонах.

; .

Задача
Какую по модулю силу F3 надо приложить к сходящимся силам F1=2 Н, и F2=4 Н, образующим с осью ОХ углы α=30º и β=60º, чтобы равнодействующая этих трех сил равнялась нулю?
Т.к. ,для определения применяем теорему косинусов

Н.
Ответ F3= 5,82 Н.
Связи и их реакции. Принцип освобождаемости от связей
Тело, которое может совершать из данного положения любые перемещения в пространстве, называется свободным (например, воздушный шар в воздухе). Тело, перемещениям которого в пространстве препятствуют какие-нибудь другие, скрепленные или соприкасающиеся с ним тела называетнесвободным.
Все то, что ограничивает перемещения данного тела в пространстве, называют связью.
Примерами несвободных тел являются груз, лежащий на столе; дверь, закрепленная на петлях и т.д. Связями в этих случаях будут: для груза – плоскость стола, не дающая грузу перемещаться по вертикали вниз; для двери – петли, не дающие ей отойти в сторону от косяка двери.
Сила, с которой данная связь действует на тело, препятствуя тем или иным его перемещениям, называется силой реакции (противодействия) связи или простореакцией связи.
Активные силы – силы, не зависящие от связей.
Значение реакций связей зависит от активных сил и наперед неизвестно (если никакие другие силы на тело не действуют реакции равны нулю); для их определения надо решить соответствующую задачу механики.
Направлена реакция связи в сторону, противоположную той, куда связь не дает перемещаться телу.
Когда связь может препятствовать перемещениям тела по нескольким направлениям, направление реакции такой связи наперед неизвестно и должно определяться в результате решения задачи статики. Правильное определение направлений реакций связей играет при решении задач механики важную роль.
Одним из основных положений механики является принцип освобождаемости от связей, согласно которому всякое несвободное твердое тело можно рассматривать как свободное, если отбросить связи заменивих действие реакциями.
Гладкая опорная поверхность  | Нить  |
Невесомый стержень  | Шарнирно-подвижная опора  |
Шарнирно-неподвижная опора  | Жесткая заделка  |
Скользящая заделка  | Бискользящая заделка  |
Сферический шарнир  | Пространственная жесткая заделка  |
Подпятник  | Подшипник  |

Задача 1
Определить момент М пары сил, при котором реакция опоры В равна 250 Н, если интенсивность распределенной нагрузки q = 150 Н/м, размеры АС = СВ = 2 м.
Применим принцип освобождаемости от связей и заменим связи соответствующими реакциями.Составим уравнение равновесия:

Т.к. силаQ = q∙AC;

Подставляя численные значения получим Н∙м.
Ответ: М = 200 Н∙м.

Задача 2
К балке AD приложена пара сил с моментом М = 200 Н∙м, распределенная нагрузка интенсивностью q = 20 Н/м и сила F. Какой должна быть эта сила, для того чтобы момент в заделкеА равнялся 650 Н∙м, если размеры
AB = BC = CD = 2 м.

Применим принцип освобождаемости от связей и заменим связи соответствующими реакциями.Составим уравнение равновесия:
Т.к. силаQ = q∙CD;

Подставляя численные значения получим Н.
Ответ: F = 144,3 Н.
© 2014-2022 — Студопедия.Нет — Информационный студенческий ресурс. Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав (0.012)
Несвободное твердое тело можно рассматривать как свободное, на которое, кроме задаваемых сил, действуют реакции связей.
Реакция гладкой плоскости направлена перпендикулярно к плоскости.
Реакция нити направлена вдоль нити.
т. D – точечная опора.
Если одна из соприкасающихся поверхностей является точкой, то реакция направлена по нормали к другой поверхности.
Если (известно) существует два взаимноперпендикулярных направления на плоскости, в одном из которых связь препятствует перемещению тела, а в другом нет, то направление реакций противоположно первому направлению.

Балка АВ поддерживается стержнем КС. Реакция стержня направлена по стержню.

а) Неподвижный шарнир (цилиндрический)

Если два тела соединены болтом, проходящим через отверстия в этих телах, то такое соединение называется шарнирным. Реакция цилиндрического шарнира может иметь любое направление в плоскости, перпендикулярной к оси шарнира.
б) Подвижный шарнир
в) Шаровой (сферический) шарнир и подпятник.
Эта связь закрепляет какую-нибудь точку твердого тела так, что она не может совершать никаких перемещений в пространстве. Реакция шарового шарнира и подпятника может иметь любое направление в пространстве.
Читайте также: