
Проект робот уборщик школьной территории
Обновлено: 18.05.2024
2 Цель : Создать робота, который будет убирать мусор в разных помещениях
3 Задачи : Собрать программируемую основу для уборки мусора Установить ковш для сборки мусора Нужны обрывки бумаги или пластмассовые предметы небольшого размера
5 Ресурсы : Кадровые ресурсы : Консультанты – отряд 220 Вольт Материальные : Роботы компании Lego с инструкциями на английском языке в электронном варианте ПК Кусочки бумаги или небольшие пластмассовые предметы Информационные :
6 Результаты : Робот собрал мусор ( мелкие предметы, обрывки бумаги, упаковки из магазинов )
7 Риски : Риск в том, что робот не сможет перемещать тяжелые предметы Большая затрата электроэнергии не сможет позволить роботу дальше собирать мусор, так как он разряжается
8 Пути преодоления : Нужно установить ковш Установить аккумулятор Нужно обязательно установить бортики для сборки мусора, чтобы мусор не вываливался за края мусоросборника

Роботы бывают самые разные, от игрушек до сложных машин и применяются в различных целях. Нас всегда интересовало, как они устроены, как работают, кто их придумал, когда они появились. Всегда интересно узнать принцип работы сложных механизмов, чтобы можно было в будущем самому их воспроизвести. Наука и техника не стоит на месте, постоянно создаются новые, все более совершенные роботы для различных областей жизни. Поэтому целью моей работы: является расширить знания в области науки и техники, а именно — робототехники, попробовать собрать простейшую модель робота–уборщика для вытирания пыли.

РОССИЙСКАЯ ФЕДЕРАЦИЯ
НАЦИОНАЛЬНАЯ ОБРАЗОВАТЕЛЬНАЯ ПРОГРАММА
МЕЖРЕГИОНАЛЬНЫЙ ФЕСТИВАЛЬ ИССЛЕДОВАТЕЛЬСКИХ РАБОТ
Курганов Александр Александрович
Трошина Наталья Георгиевна
учитель начальных классов
РОССИЙСКАЯ ФЕДЕРАЦИЯ
НАЦИОНАЛЬНАЯ ОБРАЗОВАТЕЛЬНАЯ ПРОГРАММА
МЕЖРЕГИОНАЛЬНЫЙ ФЕСТИВАЛЬ ИССЛЕДОВАТЕЛЬСКИХ РАБОТ
План исследования
Сегодня во многих сферах деятельности, человека заменяют автоматические устройства, которые способны не только выполнять много разных операций, но и оперативно переобучаться с одной операции на другую.
Роботы бывают самые разные, от игрушек до сложных машин и применяются в различных целях. Нас всегда интересовало, как они устроены, как работают, кто их придумал, когда они появились. Всегда интересно узнать принцип работы сложных механизмов, чтобы можно было в будущем самому их воспроизвести. Наука и техника не стоит на месте, постоянно создаются новые, все более совершенные роботы для различных областей жизни. Поэтому целью моей работы: является расширить знания в области науки и техники, а именно — робототехники, попробовать собрать простейшую модель робота–уборщика для вытирания пыли.
Гипотеза: предположим, что изучив различные модели современных роботов, возможно, смоделировать домашнего робота помощника.
Исследование проводилось поэтапно в течение трех месяцев (октябрь – декабрь 2014 года).
1 этап (октябрь): выбор темы исследования, формулирование цели и задач, определение методов исследования, работа с научной литературой и периодической печатью по проблеме.
2 этап (ноябрь): Конструирование и сборка модели робота.
3 этап (декабрь): Презентация созданной модели робота – уборщика для вытирания пыли.
Библиография.
2.1 Описание и устройство робота………………………………………………………………. 8
Список использованной литературы…………………………………………. 10
1- этап конструкции робота …………………………………………. I
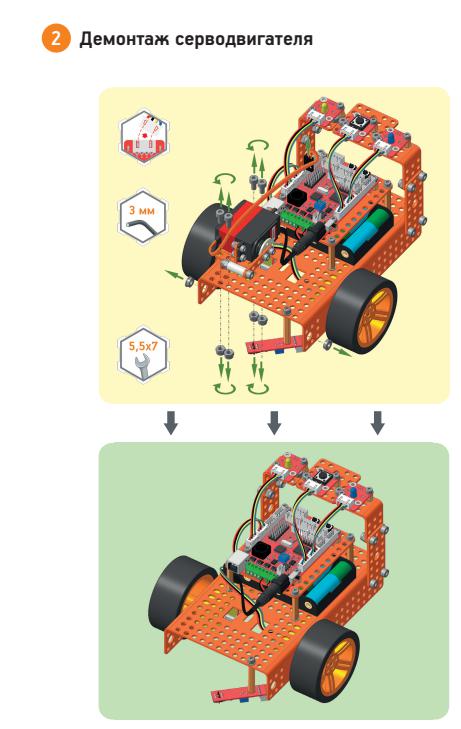
2 этап - конструкция вибрационного двигателя.………………………………………………. II
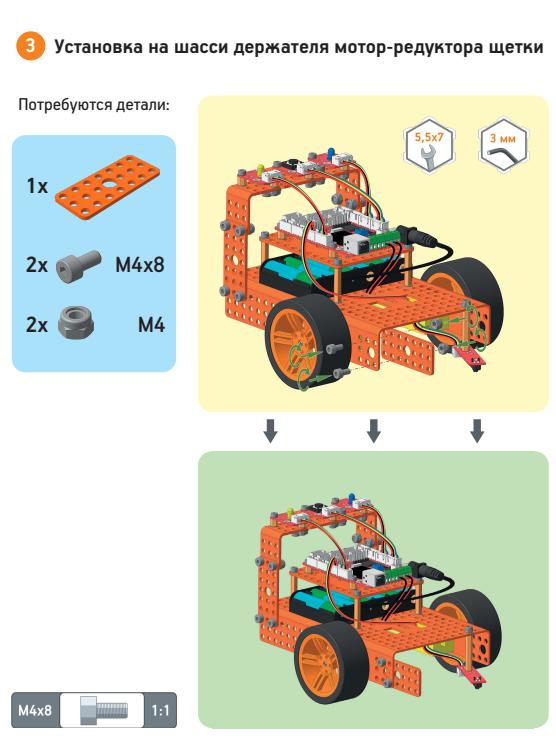
3 этап - крепление вибрационного двигателя к пластиковой тарелке…..……………………..III
Сегодня во многих сферах деятельности, человека заменяют автоматические устройства, которые способны не только выполнять много разных операций, но и оперативно переобучаться с одной операции на другую.
Роботы бывают самые разные, от игрушек до сложных машин и применяются в различных целях. Нас всегда интересовало, как они устроены, как работают, кто их придумал, когда они появились. Всегда интересно узнать принцип работы сложных механизмов, чтобы можно было в будущем самому их воспроизвести. Наука и техника не стоит на месте, постоянно создаются новые, все более совершенные роботы для различных областей жизни. Поэтому целью моей работы: является расширить знания в области науки и техники, а именно — робототехники, попробовать собрать простейшую модель робота–уборщика для вытирания пыли.
Задачи.
Познакомится с историей создания роботов;
Проанализировать научно-популярную литературу, для определения уровня развития робототехники;
Презентовать созданную модель робота – уборщика для вытирания пыли.
Объект исследования: процесс создания модели робота-уборщика.
Предмет исследования: моделирование простейшую модель робота-уборщика.
Методы исследования:
Сбор и анализ литературных источников, интернет - ресурсов и полученных знаний;
Гипотеза: предположим, что изучив различные модели современных роботов, возможно, смоделировать домашнего робота помощника.
1. Теоретическая часть.
1.1. История создания робота.
С момента своего появления полвека назад роботы прошли путь от примитивных механизмов до сложных, эффективных устройств, во многом превзойдя по своим возможностям человека. В ближайшие десятилетия всё более совершенные роботы станут незаменимыми помощниками людей и смогут взять на себя обеспечение большей части потребностей цивилизации.
1.2. Как роботы помогают людям
Современные мобильные роботы работают во вредных или опасных для человека условиях. Например, при ликвидации последствий аварий, при работе с взрывоопасными предметами. Использование мобильных роботов в таких условиях позволяет человеку не рисковать своей жизнью и здоровьем.
Промышленные роботы
Появление станков с числовым программным управлением привело к созданию программируемых манипуляторов для разнообразных операций по загрузке и разгрузке станков. Появление в 70-х гг. микропроцессорных систем управления и замена специализированных устройств управления на программируемые контроллеры позволили снизить стоимость роботов в три раза, сделав рентабельным их массовое внедрение в промышленности. Этому способствовали объективные предпосылки развития промышленного производства.
Бытовые роботы
Одним из первых примеров удачной массовой промышленной реализации бытовых роботов стала механическая собачка корпорации Sony. В сентябре 2005 в свободную продажу впервые поступили первые человекообразные роботы производства фирмы Mitsubishi. Робот стоимостью $15 тыс. способен узнавать лица, понимать некоторые фразы, давать справки, выполнять некоторые секретарские функции, следить за помещением. Всё большую популярность набирают роботы-уборщики, по своей сути — автоматические пылесосы, способные самостоятельно прибраться в квартире и вернуться на место для подзарядки без участия человека.
Исследовательские роботы.
Они служат для поиска, сбора, переработки и передачи информации об исследуемых объектах. К числу таких объектов относятся космическое пространство, поверхности планет, подводное пространство, подземные полости такие, как шахты и пещеры.
Например, без робота Dante II человек никогда бы не заглянул в кратер действующего вулкана, а без робота Sojourner наши знания о Марсе были бы намного более скудными. Этот агрегат в 1997 году высадился на поверхность планеты и передал на Землю огромное количество фотоснимков.
Военные роботы.
Эти роботы, работают в специальных условиях и позволяют, не рискуя жизнью людей, осуществлять различные операции спасательного и антитеррористического характера.
Сегодня в основном речь идет лишь о дистанционно управляемых системах. Например, беспилотные летательные аппараты, роботы-сапёры, танки, и наземные бронетранспортеры-разведчики. Один такой беспилотный летательный аппарат может "присматривать" с неба за целой страной.
Роботы в медицине.
Роботы всё больше используются в медицине. В некоторых областях они уже могут работать более эффективно, с большей точностью и меньшей вероятностью ошибки, чем доктора люди. Скоро можно будет совместить робохирургов с технологиями диагностирования (экспертные системы уже давно используются для постановки диагнозов, анализа рентгеновских снимков и т. п.).
Спортивные роботы.
Одним из наиболее эффектных и зрелищных направлений спортивной робототехники является футбол роботов. Многими специалистами утверждается, что научить машину играть в футбол гораздо труднее, чем игре в шахматы. Помимо футбола существует множество иных состязаний роботов: робосумо, спринт, ориентирование на местности, дуэли и т.д. 1
Роботы – путешественники.
К спортивным роботам можно отнести роботов-путешественников, задача которых - самостоятельно доехать из одной точки в другую. Маршрут может быть ограничен специальным полигоном, а может быть длиной в десятки и сотни километров.
Кроме того, роботы должны выполнять определенные задания, например, к каждому роботу прицеплен груз и необходимо доставить его в определенные точки, отмеченные на карте. 2
Как устроены роботы и как они работают.
Роботы бывают разных размеров от микроскопических – похожих на маленьких мушек, до огромных – размером с многоэтажный дом. В каждом роботе есть подвижные части – шарниры – похожие на суставы человека, при помощи которых робот может двигаться. Конечности робота, при помощи которых он может брать, поднимать, опускать и перемещать предметы или выполнять какие-нибудь работы, называются манипуляторами. Роботы могут передвигаться по земле, по горам, могут опускаться под воду, летать по воздуху.
Силу и способность двигаться роботу дают электрические моторы или двигающиеся при помощи воздуха или жидкости цилиндры, которые называются приводом. 3
Некоторыми роботами люди могут управлять, находясь от них очень далеко, при этом команды роботу человек посылает по радиосвязи или по подключенному к роботу кабелю.
Некоторые роботы могут выполнять задания сами, без управления человеком. Такие роботы запрограммированы человеком на самостоятельную работу. Про таких роботов говорят, что они обладают искусственным разумом или интеллектом.
Свидетельство и скидка на обучение каждому участнику
Зарегистрироваться 15–17 марта 2022 г.

Описание презентации по отдельным слайдам:
Роботизированный уборочный комплекс Авторы: Ким Илья Владимирович, 7 тех класс, Евченко Илья Андреевич, 6 тех класс, Севастьянов Дмитрий Николаевич, 4 в класс, Лозовский Дмитрий, 4 б класс, Мещанинов Дмитрий, 3 г класс, Лейхнер Максим, 3 а класс

Актуальность: необходимость решения проблем уборки снега и мусора, поддержания чистоты в условиях современного города (мегаполиса) На Земле роботы подменяют людей на всевозможной сложной утомительной работе или в условиях возможного риска для здоровья человека: собирают автомобили, разминируют взрывные устройства, варят трубопроводы на морском дне и трудятся в "горячих" опасных зонах атомных электростанций. Неоспоримо преимущество роботов в космических исследованиях. Они не нуждаются в еде, питье и способны работать в крайне неблагоприятных условиях. Роботы проводят исследования планет, их спутников и других небесных тел. Луноходы и марсоходы, управляемые человеком на громадных расстояниях, ведут видео и фото съёмку поверхности, берут пробы грунта, проводят его анализ, передают результаты на Землю. Но мы решили с небес вернуться на землю и попробовать решить самые острые проблемы большого (а может и небольшого) города…

Что мы видим? Город завален снегом, техника не успевает вывозить снег, тем более чистить. С самого раннего утра дворники гребут, скребут, метут и долбят снег и лед до позднего вечера! А снег все идет… Дороги – сплошное снежное месиво, гололед, пробки, аварии!

Задачи: изучить и смоделировать технические средства для поддержания чистоты и уборки в городах, определить пути их эффективного использования, создать роботизированный уборочный комплекс со следующими возможностями: Возможностью дистанционного управления с обратной связью. Набором функций, необходимых для манипулирования устройствами. Системой реагирования на нестандартные ситуации. Достаточно мощной энергетической системой для обеспечения всех функций. На основе компонентов конструктора Lego NXT и программы дистанционного управления, разработан Роботизированный уборочный комплекс, оснащенный различными устройствами для выполнения самых различных уборочных работ. Оператор дистанционно управляет устройствами, анализируя при этом ситуацию в реальном времени с помощью установленных беспроводных web-камер. Многие устройства работают также и автономно, согласно заданным программам.

Состав комплекса Роботы – уборщики Роботы – погрузчики и Роботы - тягачи

Роботы - уборщики Основное их назначение – уборка. Убирать везде, где их поставят это делать. Дома – подметать, пылесосить, протирать и т.д. На улицах – мести, грести, мыть, сушить, пылесосить, колоть, сверлить, долбить и т.д. Могут деревья и кустарники постричь, и дорожную разметку или разметку на спортивных площадках сделать… В общем – мастера на все руки (манипуляторы)! Именно роботы-уборщики дают нам экономию людских и денежных ресурсов, при использовании этого комплекса. Именно они способны заменить целую армию дворников. Идёт снег, падают листья – они работают. Нет снега, нет работы – заряжаются!

Роботы - уборщики Авторы: Лозовский Дмитрий, 4 б класс, Мещанинов Дмитрий, 3 г класс, Лейхнер Максим, 3 а класс

Роботы – погрузчики и Роботы - тягачи Основное их назначение – погрузка, разгрузка. Могут выполнять и другие виды работ. На улицах – любые виды уборочных работ, а также и аварийно-восстановительных работ (прорыв или ремонт теплотрассы, других коммуникаций) На дорогах – погрузочно-разгрузочные, строительные работы. А также: копать, обрезать, косить, мести, грести, мыть, сушить, пылесосить, колоть, сверлить, долбить и т.д. Всё вместе – ПОСТРОИТЬ, НАВЕСТИ ВЕЗДЕ ПОРЯДОК, А МОЖЕТ – НАОБОРОТ, ВСЁ РАЗРУШИТЬ, ИЗМЕЛЬЧИТЬ, РАЗДРОБИТЬ… Так что и следов не останется! Мобильный комплекс под управлением одного лишь водителя тягача, способен выполнять большой объем работ. Ведь этот тягач может вывозить весь этот отряд роботов в нужное место, затем вывозить снег и мусор и после окончания работ забрать обратно этих роботов.

Авторы: Ким Илья Владимирович, 7 тех класс, Евченко Илья Андреевич, 6 тех класс, Севастьянов Дмитрий Николаевич, 4 в класс Роботы – погрузчики и Роботы - тягачи

Результаты: Разработанные роботы, входящие в комплекс, способны выполнять многие поставленные задачи. Они оснащены датчиками четырёх видов, беспроводными web-камерами и различными инструментами. Управление роботами дистанционное, в режиме реального времени, либо роботы работают автономно, согласно заданным программам. Ситуация отслеживается и анализируется оператором, дистанционно управляющим устройствами с безопасного расстояния с помощью установленных беспроводных web-камер.

Для выполнения самых различных работ, разработаны роботы с разным набором навесного оборудования, отработаны и смоделированы некоторые из возможностей улучшения и совершенствования работы городских уборочных служб: Результаты:

Руководитель проекта: Незнанов Сергей Александрович – учитель информатики Выводы: Данный проект и специально доработанное для него программное обеспечение должны быть интересными для городских коммунальных служб. Возможности конструктора LEGO NXT-2.0 в моделировании городской уборочной техники позволяют решать поставленные задачи или предложить возможные пути их решения. Отработаны и смоделированы некоторые из возможностей улучшения и совершенствования работы городских уборочных служб. Возможна большая экономия людских, денежных и материальных ресурсов.



Отзывов: 0 | Написать отзыв
Цели проекта:
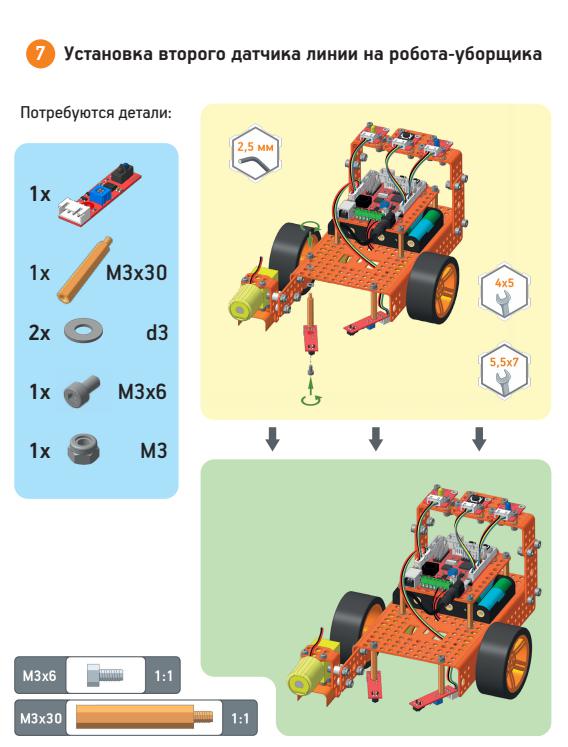
1. Изучение особенностей совместного использования двух датчиков линии для определения линии и движения вдоль нее.
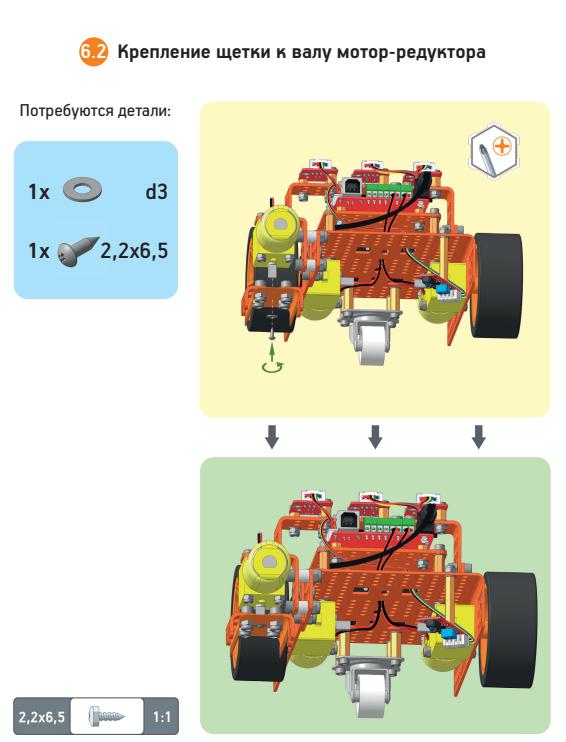
2. Получение навыков применения навесного оборудования с приводом от мотор-редуктора.


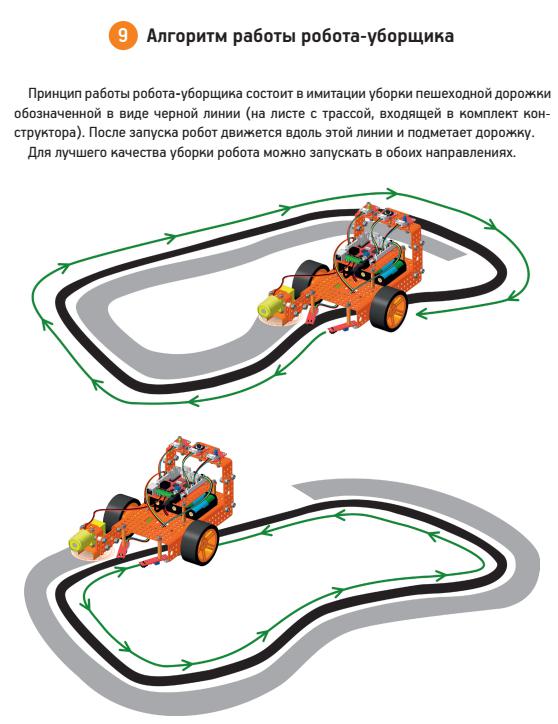
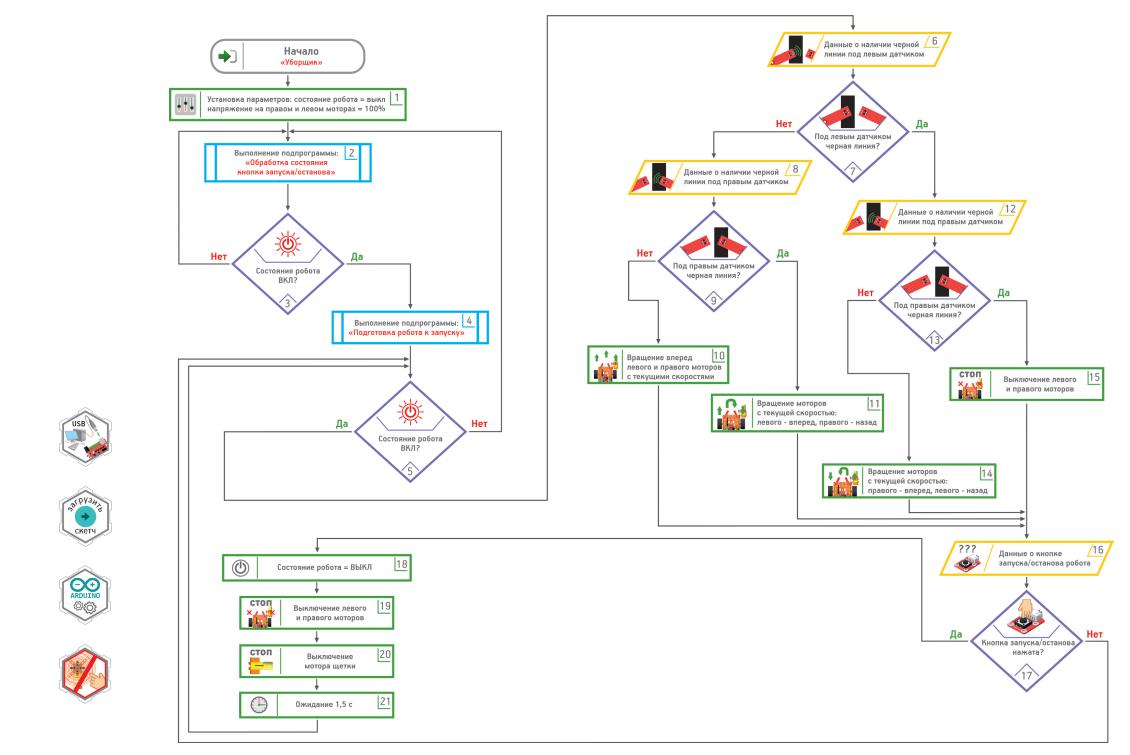
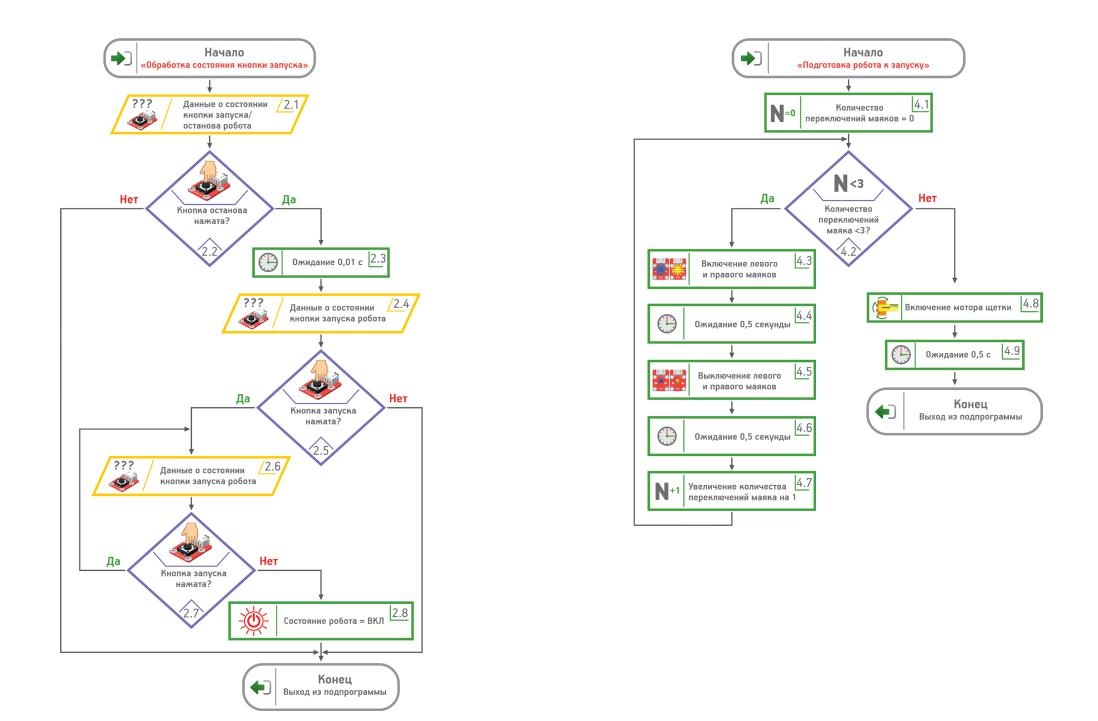
Скетч, реализующий указанный алгоритм можно скачать по ссылке:
Написать отзыв
Ваш отзыв: Внимание: HTML не поддерживается! Используйте обычный текст.
Читайте также:
- Новый педагогический класс в школе
- Почему церковь отделена от государства кратко
- Какие морфонологические явления возникают при словообразовании кратко охарактеризуйте их
- В каком направлении действовал естественный отбор в процессе эволюции человека кратко
- Анализ севастополь в декабре месяце краткое содержание