
По какому принципу вращаются винты коптера кратко
Обновлено: 05.07.2024
Теперь мы знаем, что такое квадрокоптер, и как у него вращаются винты (см. предыдущий пост про это). На этом рисунке разъясняется, как этот аппарат перемещается в воздухе без элеронов и рулей высоты:
Итак, имеем три основных способа работы пропеллеров:
* все вращаются с одинаковой скоростью - чем быстрее вращаются, тем аппарат взлетает выше. сила вращения всех пропеллеров отвечает за высоту полета.
* Одна пара моторов вращается быстрее, чем вторая пара моторов. В этом случае квадрик будет делать поворот - в зависимости от того, какие два мотора вращаются быстрее других - поворот влево или вправо.
* один из моторов вращается быстрее, чем остальные, т.е. создает большую тягу. В результате мы получаем наклон коптера набок и как следствие, коптер начинает двигаться в сторону наклона.
Каждый из нас хотя бы раз в жизни уже сталкивался с квадрокоптером. Кто то видел его из далека, кто то купил и летает на нем, а кто то думает собрать его самостоятельно. Для тех, кто все таки решился собрать квадрокоптер самостоятельно будет полезно разобраться в некоторых теоретических моментах. Начнем пожалуй с самого простого вопроса: как он вообще летает.
Не буду углубляться в физику и аэродинамику, вспоминать о подъемной силе и хитром профиле винтов, скажу проще:
Квадрокоптер в стандарте имеет 4 двигателя (quadro - означает 4, но может быть от 2 до бесконечности)/ эти двигатели раскручивают винты, которые создают подъемную силу. Чтобы квадрокоптер не начало неконтролируемо крутить вдоль вертикальной оси, два винта вращаются в одну сторону а два в другую:
Стандартная схема вращения винтов, но бывает и обратная (из преимуществ обратной схемы - винты не закидывают камеру остатками травы, листьев и всех тех, кто порублен винтами в капусту. я о комарах, мухах и мошках если что. )
Стандартная схема вращения винтов, но бывает и обратная (из преимуществ обратной схемы - винты не закидывают камеру остатками травы, листьев и всех тех, кто порублен винтами в капусту. я о комарах, мухах и мошках если что. )
Моторы и винты обычно подбираются так, чтобы запас подъемной силы был 100% (суммарная подъемная сила винтомоторных пар должна быть в два раза больше расчетного веса квадрокоптера). Как вы уже наверное догадались, для того чтобы взлететь подъемная сила винтов должна превысить силу тяжести, действующую на квадрик, для посадки подъемная сила должна быть меньше силы тяжести. Скорость вращения моторов и соответственно подъемная сила управляются стиком газа (стандартно левый стик на пульте управления, направление от себя/на себя - не подпружиненное направление).
С взлетом и посадкой разобрались, дальше разбираем, как осмотреться по сторонам после взлета:
Для того, чтобы повернуть налево, квадрокоптеру необходимо уменьшить скорость винтов, вращающихся по часовой стрелке, но чтобы квадрокоптер не просел по высоте, необходимо увеличить скорость вращения винтов, вращающихся против часовой стрелки.
Для поворота на право соответственно все действия должны быть выполнены наоборот:
Управляются повороты опять же стиком газа (левым стиком пульта), но только на этот раз направление движения стика - влево-вправо.
Взлетели, огляделись, выбрали направление. сейчас необходимо полететь вперед (назад, влево или вправо). Для того чтобы квадрокоптер начал движение по горизонтали, необходимо изменить вектор тяги с вертикального на наклонный в нужном направлении, а для этого нужно наклонить квадрокоптер в сторону движения. Выполняется это замедлением вращения винтов с той стороны, куда хотим полететь.
Если же хотим сделать бочку, то продолжаем наклонять квадрокоптер и дальше пока он не сделает кувырок, главное помнить, что при любых наклонах снижается подъемная сила винто-моторной группы (вернее она перераспределяется, часть подъемной силы тратится на горизонтальное движение), поэтому при наклонах квадрокоптера необходимо немного увеличивать уровень газа, чтобы квадрокоптер не просел по высоте. Наклоны квадрокоптера управляются правым стиком пульта (в какую сторону необходимо наклонить квадрокоптер, в ту сторону и перемещаем стик).
Для простоты управления квадрокоптером все действия по торможению одних двигателей и ускорению других выполняются полетным контроллером квадрокоптера. Он получает команды с пульта, что ему необходимо сделать, и выбирает какие двигатели ускорить, а какие притормозить (только представьте, что каждым двигателем квадрокоптера вы управляете отдельно, управление было бы в разы сложнее.
А это идея, сделать квадрик с прямым управлением моторами, но нужен пульт, на котором оба стика подпружинены, но это как нибудь позже. а пока я ушел писать продолжение теории квадрокоптера. На очереди разбор полетного контроллера.

Эта небольшая статья содержит базовую информацию о пропеллерах для квадрокоптера (иногда их называют реквизитами) и рассказывает о том, как шаг, форма и количество лопастей влияют на их производительность, тягу и эффективность.
Основные понятия
Параметры реквизитов определяются их длиной, шагом, площадью, направлением вращения, а также формой и количеством лопастей
Длина и шаг
Эти параметры являются главными. Под длиной понимают диаметр диска, образующегося при вращении пропеллера. Шаг может быть определен как расстояние, которое пропеллер может пройти в некоей твердой среде за один полный оборот (вспомните, как входит в доску самый обыкновенный шуруп). При прочих равных условиях, величина шага определяется наклоном (углом атаки) лопастей квадрокоптера.
Тяга винтомоторной группы (ВМГ) определяется объемом воздуха, который ее винты способны переместить. Понятно, что увеличение длины и/или шага пропеллеров при сохранении их скорости вращения положительно сказывается на тяге, но, к сожалению, увеличивает и сопротивление воздуха за счет растущей турбулентности. Для вращения более крупного винта или винта с большим углом наклона лопастей будет затрачено больше энергии, что приведет к снижению времени полета при прочих равных условиях.
Крупные винты с малым шагом идеально подходят для аэрофотосъемки, а небольшими пропеллерами с большим шагом оснащаются гоночные дроны.
Количество и форма лопастей
Классическим вариантом является наличие у пропеллера двух лопастей. Впрочем, на самых маленьких моделях применяют воздушные винты с тремя, четырьмя и даже пяти лопастями. Понятно, что многолопастный воздушный винт снижает уровень турбулентности за счет создания более равномерного потока. Более того, дополнительные лопасти увеличивают общую площадь винта, что благотворно отражается на подъемной силе квадрокоптера. Из этого следует, что многолопастный винт меньшего диаметра способен создавать ту же подъемную силу, что и более крупный классический пропеллер. Многолопастные пропеллеры делают летательный аппарат более отзывчивым, что очень важно при полетах в режиме Acro . Основным недостатком таких винтов является сложность изготовления и центровки, а также достаточно высокая стоимость.

Советуем обратить внимание на разницу в форме окончания реквизитов. Они бывают трех видов – Normal, Bullnose (BN), Hybrid Bullnose (HBN). Винты Normal имеют заостренные на концах лезвия, создают меньшую тягу, но способствует эффективному расходу энергии аккумулятора. Винты BN при равном диаметре имеют большую площадь и тягу. Дополнительный вес на кончиках лопастей увеличивает крутящий момент и улучшает чувствительность летательного аппарата по оси рысканья. К сожалению, эти положительные моменты сопровождаются высоким энергопотреблением и снижением времени полета. Пропеллеры HBN занимают промежуточную позицию.
Направление вращения
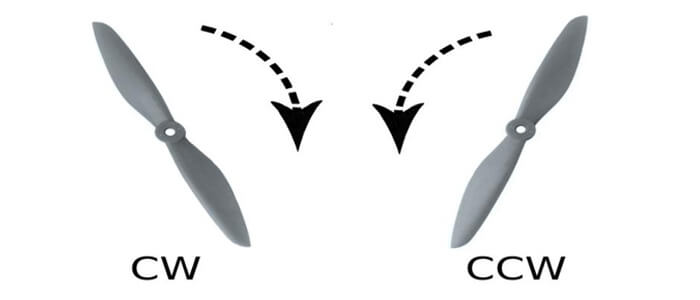
На мультикоптерах используются два типа двигателей – CW (с вращением вала по часовой стрелке) и CCW (с вращением вала против часовой стрелки). Схема установки моторов зависит от типа летательного аппарата. Несколько таких схем показаны на рисунке.
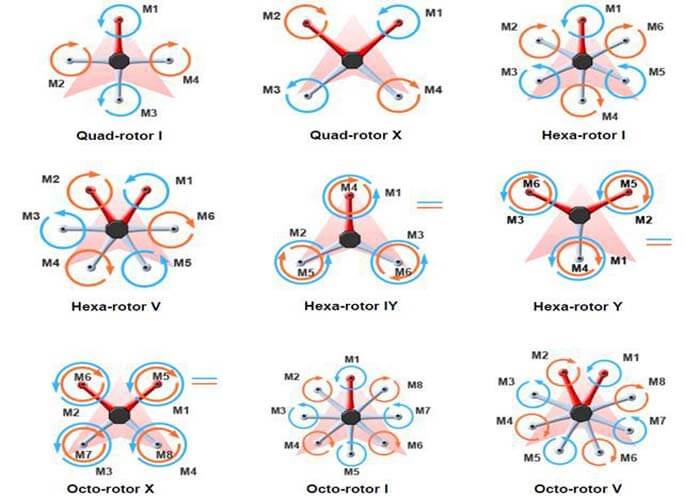
На направление вращения конкретного пропеллера указывает приподнятая кромка его лопастей.
Материал и качество
Наиболее популярны пластиковые винты. Они отличаются пластичностью, низкой ценой, широким ассортиментом и высокой степенью доступности. С одной стороны, гибкость лопастей повышает их устойчивость к повреждениям, с другой – вызывает проблемы с балансировкой.
Некоторые фирмы выпускают винты из углеродного волокна. Карбоновые винты довольно дороги, но обладают необходимой жесткостью и высокой эффективностью без значительного увеличения веса.
Промежуточное положение занимают пропеллеры, выполненные из пластика, усиленного углеродным волокном. Этот тип пропеллеров обладает высокой жесткостью и сравнительно низкой стоимостью.

Качество винтов подразумевает точность их изготовления. Высококлассные пропеллеры хорошо сбалансированы и практически не вносят дополнительную вибрацию в работу ВМГ. Лучшие реквизиты выпускаются под брендами GWS, APC и EMP.
Спецификация
Узнать о параметрах конкретного пропеллера для квадрокоптера можно по его кодировке. Производители используют два типа обозначений: LLPPxB или LxPxB. Здесь L обозначает длину, P – шаг, а B – количество лопастей. Для классических пропеллеров параметр B обычно не указывается.
Например, пропеллер 6045 (или 6×4,5) имеет две лопасти, шестидюймовую длину и шаг 4,5 дюйма. Другим примером является пятидюймовый трехлопастный пропеллер 5040×3 (или 5x4x3), имеющий шаг 4 дюйма.
Иногда в конце обозначения ставится буква R или C (может отсутствовать), определяющая направление вращения. Воздушные винты R устанавливаются на двигатели CW, а C – на моторы CCW. Изредка к обозначению добавляются аббревиатуры BN или HBN (см. выше).
Методы установки
Установить винты на квадрокоптер можно по-разному. Очень часто вал электродвигателя представляет собой простой металлический штырь, не имеющий каких-либо приспособлений для установки пропеллера. В этом случае применяют специальные переходники – пропсейверы и цанговые зажимы.
Пропсейвер (см. фото) удобно использовать для проведения экспериментов при создании самодельных моделей. Он выглядит как втулка, в боковой поверхности которой имеется два симметричных отверстия с установленными в них винтами. Приспособление устанавливается на вал, а винты затягиваются. Пропеллер также надевается на вал и фиксируется двумя нейлоновыми стяжками или резиновым кольцом.

Более надежным переходником является цанговый зажим. Он представляет собой резьбовое соединение с разрезной конусообразной втулкой. Цанга надевается на вал, далее устанавливается зажимная втулка, пропеллер и шайба. Вся конструкция фиксируется гайкой особой формы – коком.

Если ротор бесколлекторного двигателя находится снаружи (моторы класса Outrunner), то на его верхней поверхности обычно имеется несколько резьбовых отверстий для установки различных переходников и креплений.
У производителей готовых коптеров с бесколлекторными моторами очень популярен вариант с самозатягивающимися гайками от компании DJI . У таких двигателей вал заканчивается резьбой, противоположной направлению вращения ротора.
Балансировка пропеллеров
Можно с уверенностью сказать, что большинство пропеллеров, особенно дешевых, нельзя назвать сбалансированными на 100%. Такие винты не только раздражающе сильно шумят, но и вносят дополнительную вибрацию в работу ВМГ. Из-за этого, в частности, снижается качество воздушных съемок (эффект желе). Хуже того, постоянные колебания вызывают дополнительный износ двигателей, подшипников и шестерней, что повышает стоимость обслуживания летательного аппарата.
Как видим, без процедуры балансировки винтов для квадрокоптера нам не обойтись. Для этого понадобятся:
- Винт;
- Скотч или суперклей (можно заменить лаком для ногтей);
- Наждачная бумага;
- Специальный балансир пропеллеров Du-Bro Tru-Spin – один из лучших, или китайские аналоги.

Прежде всего, нужно выставить само приспособление для балансировки так, чтобы его ось была строго горизонтальной.
Лопасть проверяется на отсутствие повреждений, устанавливается на ось и слегка отклоняется в ту или иную сторону. Если он не возвращается в горизонтальное положение, нужно облегчить (подчистить наждачной бумагой) более тяжелое лезвие или наклеить кусочек липкой ленты на более легкое. Необходимо повторять процедуру до тех пор, пока лезвия не уравновесятся. Липкую ленту успешно заменяет мазок суперклея или лака.
Ось балансировочного станка переворачивается – нужно убедиться, что пропеллер сохраняет равновесие и в этом положении. Отметим, что все подчистки и наклеивания должны выполняться на внутренних (вогнутых) поверхностях лопастей.
Следующим шагом будет балансировка ступицы. Для этого пропеллер устанавливается вертикально. Если он отклоняется вправо, нужно утяжелять клеем или лаком левую часть ступицы и наоборот. Добиваемся баланса, переворачиваем пропеллер и убеждаемся, что в этом положении он также уравновешен. Процедура закончена.
Калькулятор eCalc
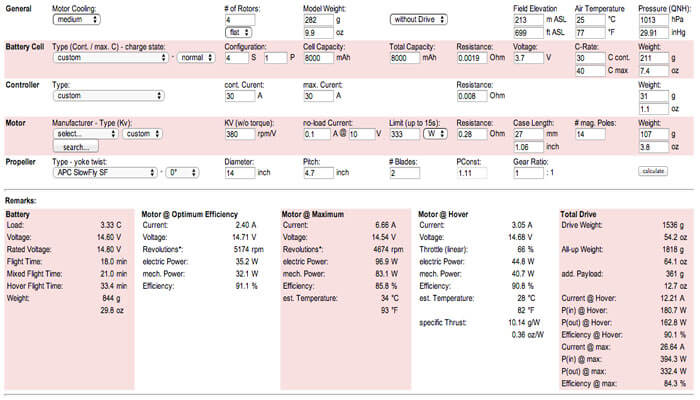
На первый взгляд, все понятно, но есть несколько нюансов, которые могут повлиять на результаты вычислений.
Прежде всего, вводится полный взлетный вес мультикоптера (с подвесом и камерой, если таковые имеются). Если будет указано Without Drive (Без привода), то вводим суммарный вес рамы, пропеллеров, платы контроллера, подвеса, камеры и оборудования для FPV полетов. Добавим процентов 10 на массу проводов и получаем искомую цифру.
Вводим количество роторов, их схему (одиночная или соосная), максимальную высоту полета и погодные условия, при которых он будет проводиться (температуру за бортом и атмосферное давление).
Из выпадающего списка выбирается нужный аккумулятор . Если необходимая батарея отсутствует, можно выбрать ближайшую по емкости и токоотдаче. Программа заполнит остальные поля самостоятельно. Задается структура и вес аккумулятора. Если предполагается параллельная установка нескольких АКБ, то в поле P вписывается их количество, а в окне Weight задается их общий вес.
Далее из выпадающего списка выбираются тип ESC или максимальный ток этих регуляторов.
Выбирается фирма-производитель двигателей. Появляется окно с его оценкой. По уровню KV подбирается конкретный образец.
Переходим к пропеллерам. Выбирается тип пропеллера, его диаметр и шаг. Рекомендуется использовать диаметр воздушного винта, максимально возможный для данной рамы. Если привод имеет зубчатую трансмиссию, то вводится ее передаточное число (отношение числа зубьев ведомой шестерни к числу зубьев ведущей шестерни).
Если нужные компоненты в выпадающих списках отсутствуют, можно перейти в строку Custom и ввести все необходимые данные в соответствующих полях калькулятора. Отметим, что параметры батареи задаются для одной ячейки.
Все поля заполнены, можно выполнять вычисления. Результат расчетов будет представлен в виде циферблатов, списков и графиков.
RashVinta
RashVinta– программа расчета диаметра воздушного винта для квадрокоптера.
Программа RashVinta позволяет производить вычисления по следующим исходным данным:
- Мощность двигателя и диаметр винта;
- Мощность двигателя и частота вращения винта;
- Диаметр винта и его шаг.
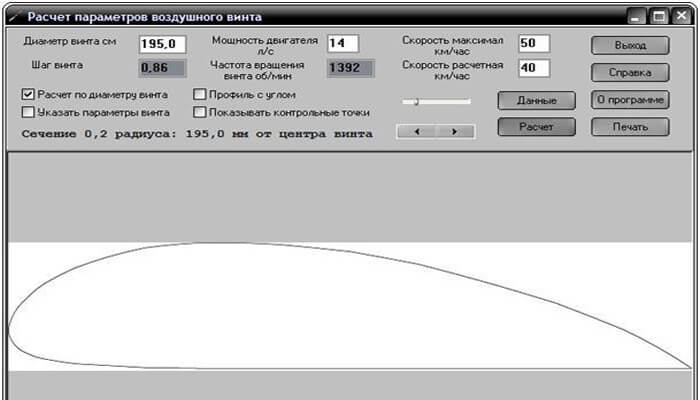
Полученный профиль можно распечатать в масштабе 1:1.
Заключение
Как видим, подбор и корректировка пропеллеров для квадрокоптера является достаточно непростой задачей. Надеемся, что наш текст поможет любителям беспилотной авиации правильно выбрать, сбалансировать и установить пропеллеры на летательный аппарат собственной конструкции, а также устранить огрехи в работе винтомоторной группы серийных моделей .
Будем благодарны вам, если поделитесь с друзьями:
Базовые принципы полета квадрокоптера
Базовые принципы полетов любой техники описывает аэродинамика и квадрокоптеры не являются исключением. Три оси вращения абсолютно однозначно задают ориентацию квадрокоптера в пространстве и направление его полета. Причем направление движения никак не зависит от расположения самого квадрокоптера в воздухе.
Любой летательный аппарат имеет курсовое смещение, что касается даже сверхзвуковых самолетов. А, как известно, настоящие вертолеты вообще без проблем могут летать боком.

Базовые принципы полета квадрокоптера
Три перечисленных выше оси или угла принято правильно называть тангажом, креном и рысканьем. Разберем их более подробно.
Под тангажом понимают поворот аппарат вокруг продольной оси, рысканием – вокруг вертикальной оси, а креном – продольной оси.
Любой квадрокоптер, как и другой летательный аппарат совершает во время полета строго определенный список маневров. Это движение, тангаж/крен и рыскание – именно они и определяют параметры полета квадрокоптера.
Если брать в рассмотрение вертолет, то его главный винт имеет влияние на тангаж и крен, а хвостовой компенсирует вращающий момент и от того, с какой скоростью он вращается и в каком положении находится, зависит рыскание.

В случае квадрокоптера все обстоит иначе. Здесь имеются целых четыре винта, два из которых вращаются по часовой стрелке, а два других в противоположном направлении.
Для большинства квадрокоптеров устанавливают двигатели с неизменным шагом и управление ими заключается в повышении или понижении числа оборотов.
Соответственно если все из винтов квадрокоптера имеют одинаковую скорость вращения, то все параметры будут скомпенсированы. При увеличении скорости вращения одного из винтов квадрокоптера баланс нарушается. При этом, если скорость винта с обратным направлением вращения будет пропорционально уменьшена, то рыскание сохранение нулевого рыскания, но изменится тангаж или крен.
Если же увеличивать обороты одновременно на обоих винтах, которые вращаются в одном направлении и уменьшить на других, ту угол рыскания будет изменен.
Управление двигателями квадрокоптера, а, следовательно, и скоростью вращения его винтов, осуществляется с пульта дистанционного управления, сигнал с которых поступает на бортовой компьютер квадрокоптера и к ним добавляются необходимые коррекции от гироскопа, акселерометра и так далее.

При проектировании и создании квадрокоптера следует выполнить все необходимые расчеты с целью нахождения оптимального баланса между массой аппарата, мощностью установленных на него двигателей и целого ряда других факторов.
В квадрокоптере каждый их параметров и характеристик тесно связан друг с другом. Так, например, если вы захотите увеличить полетное время, то нужно будет установить аккумулятор большей емкости, а, следовательно, станет больше и масса, что повлечет увеличение расхода энергии.
Также можно скачать уже готовые расчеты из сети Интернет, и уже базируясь на их данных создать макет собственного квадрокоптера.
Читайте также: