
От чего зависит вращающий момент асинхронного двигателя кратко
Обновлено: 06.07.2024
Взаимодействие тока I2 в обмотке ротора с потоком асинхронной машины Ф создает механическую силу, приводящую ротор во вращение. При определении вращающего момента, создаваемого этой силой, необходимо исходить из известного физического соотношения, согласно которому мощность, затрачиваемая на приведение тела во вращение, определяется произведением приложенного к нему момента на скорость вращения данного тела.
На ротор двигателя через вращающийся магнитный поток Ф передается некоторая электромагнитная мощность. Однако не вся мощность, переносимая на ротор магнитным потоком, расходуется на приведение его во вращение, поскольку часть ее тратится на нагревание проводников обмотки ротора.
Механическая мощность двигателя, равная разности электромагнитной мощности и мощности потерь , будет равна произведению вращающего момента на частоту вращения ротора Рмех = Мп/9,55
Механический момент двигателя зависит от трех групп величин: во-первых, что величины, определяемые конструкцией двигателя, к их числу относятся r1, r'2, x1, x'2; вовторых, величины, характеризующие напряжение, подводимое к двигателю — напряжение на его зажимах U и частота питающего напряжения f; наконец, последняя величина, определяющая момент, развиваемый двигателем, зависит от режима его работы — это скольжение s.
Помимо зависимости вращающего момента асинхронного двигателя от частоты вращения ротора большое значение имеет зависимость его от напряжения, питающего двигатель.
вращающий момент, развиваемый асинхронным двигателем, весьма чувствителен к изменению питающего напряжения. При снижении напряжения, питающего двигатель, который работает под нагрузкой, его вращающий момент снижается. В результате этого происходит понижение частоты вращения двигателя. Частота понижается (и соответственно увеличивается скольжение) до тех пор, пока вращающий момент двигателя не станет равным статическому моменту сопротивления, обусловленному приводом.
Однако если напряжение понижается очень сильно, может случиться, что максимальный вращающий момент, который развивает двигатель при данном напряжении, оказывается меньше, чем статический момент сопротивления на его валу. В этом случае происходит опрокидывание двигателя, т. е. частота вращения ротора постепенно уменьшается и в конце концов двигатель останавливается.
МЕХАНИЧЕСКИЕ ХАРАКТЕРИСТИКИ АСИНХРОННОГО ДВИГАТЕЛЯ
СИНХРОННЫЕ ДВИГАТЕЛИ
Синхронный двигатель. Принцип действия и устройство.Синхронный двигатель может работать в качестве генератора и двигателя. Синхронный двигатель выполнен так же, как и синхронный генератор. Его обмотка якоря I (рис. 291, а) подключена к источнику трехфазного переменного тока; в обмотку возбуждения 2 подается от постороннего источника постоянный ток. Благодаря взаимодействию вращающегося магнитного поля 4, созданного трехфазной обмоткой якоря, и поля, созданного обмоткой возбуждения, возникает электромагнитный момент М (рис. 291,б), приводящий ротор 3 во вращение. Однако в синхронном двигателе в отличие от асинхронного ротор будет разгоняться до частоты вращения n = n1, с которой вращается магнитное поле (до синхронной частоты вращения).
Пуск в ход и регулирование частоты вращения.Синхронный двигатель не имеет начального пускового момента. Если подключить обмотку якоря к сети переменного тока, когда ротор неподвижен, а по обмотке возбуждения проходит постоянный ток, то за один период изменения тока электромагнитный момент будет дважды менять свое направление, т. е. средний момент за период будет равен нулю. Следовательно, для пуска в ход синхронного двигателя необходимо разогнать его ротор с помощью внешнего момента до частоты вращения, близкой к синхронной. Для этой цели применяют метод асинхронного пуска.
Синхронный двигатель пускают в ход как асинхронный, для чего его снабжают специальной короткозамкнутой пусковой обмоткой 3 (рис. 293). В полюсные наконечники ротора 2 синхронного двигателя закладывают медные или латунные стержни, замкнутые накоротко двумя торцовыми кольцами. Пусковая обмотка выполнена подобно беличьей клетке асинхронной машины, но занимает лишь часть окружности ротора. В некоторых двигателях специальная короткозамкнутая обмотка
ЭЛЕКТРИЧЕСКАЯ ДУГА
При размыкании контактов электрического аппарата вследствие ионизации пространства между ними возникает электрическая дуга. Промежуток между контактами при этом остается проводящим и прохождение тока по цепи не прекращается.
Для ионизации и образования дуги необходимо, чтобы напряжение между контактами было примерно 15—30 В и ток цепи 80—100 мА.
При ионизации пространства между контактами заполняющие его атомы газа (воздуха) распадаются на заряженные частицы — электроны и положительные ионы. Поток электронов, излучаемых с поверхности контакта, находящегося под отрицательным потенциалом (катода), движется по направлению к положительно заряженному контакту (аноду); поток же положительных ионов движется к катоду.
При увеличении температуры движение электронов в металле катода ускоряется, они приобретают большую энергию и начинают покидать катод, вылетая в окружающую среду. Это явление носит название термоэлектронной эмиссии. Таким образом, под действием авто- и термоэлектронной эмиссии в электрическую дугу поступают с катода все новые и новые электроны.
При своем перемещении от катода к аноду электроны, сталкиваясь на своем пути с нейтральными атомами газа, расщепляют их на электроны и положительные ионы (рис. 303, в). Этот процесс называется ударной ионизацией. Появившиеся в результате ударной ионизации новые, так называемые вторичные электроны начинают двигаться к аноду и при своем движении расщепляют все новые атомы газа. Рассмотренный процесс ионизации газа носит лавинообразный характер подобно тому, как один камень, брошенный с горы, захватывает на своем пути все новые и новые камни, порождая лавину. В результате промежуток между двумя контактами заполняется большим количеством электронов и положительных ионов. Эта смесь электронов и положительных ионов называется плазмой. В образовании плазмы значительную роль играет термическая ионизация, которая происходит в результате повышения температуры, вызывающей увеличение скорости движения заряженных частиц газа.
Способы гашения дуги могут быть различные, но все они основываются на следующих принципах: принудительное удлинение дуги; охлаждение межконтактного промежутка посредством воздуха, паров или газов; разделение дуги на ряд отдельных коротких дуг.
Охлаждение межконтактного промежутка вызывает повышенную теплоотдачу столба дуги в окружающее пространство, вследствие чего заряженные частицы, перемещаясь из внутренней части дуги на ее поверхность, ускоряют процесс деионизации.
При удлинении дуги и удалении ее от контактов происходит увеличение падения напряжения в столбе дуги и напряжение, приложенное к контактам, становится недостаточным для поддержания дуги.
КОНТРОЛЛЕРЫ
| Контроллер или командоконтроллер - это электрический аппарат, предназначенный для ручного управления электродвигателями (пуск, реверсирование, регулирование частоты вращения, останов), называют контроллером, а электрический аппарат, предназначенный для осуществления различных переключений в цепях управления схем электропривода, а также коммутации силовых цепей с небольшими нагрузками по току, командоконтроллером. Контроллеры применяют чаще для управления двигателями постоянного и переменного тока, в частности в подъемно-транспортных установках. От реостатов они отличаются тем, что переключающее устройство не связано в одно целое с резисторами, а располагается отдельно. По конструкции контроллеры могут быть кулачковыми, плоскими, барабанными и др. Наиболее распространены кулачковые контроллеры, имеющие различную конструкцию. Основными элементами их являются кулачковые шайбы, изготовленные из электроизоляционного материала, и установленные на металлическом валу контактные элементы и корпус. Контроллер ККТ-60А, предназначенный для управления электродвигателями переменного тока до 30 кВт, показан на рис. 35 а, б. Корпус 1 контроллера состоит из двух частей, отлитых из алюминиевого сплава. На валу 3 устанавливаемом в корпусе на шариковых подшипниках, размещены шесть кулачковых шайб 7 и храповое колесо 2. Кулачковые шайбы изготовлены из изоляционного материала в виде дисков с определенным профилем. На корпусе по обе стороны вала закреплены две пластмассовые рейки 8, на которых располагаются неподвижные контакт-детали 10. Подвижные контакт-детали 11 закреплены на держателе 13, который соединен шарнирно-пружинной связью с контактным рычагом 12. Подвижная контакт-деталь связана с неподвижным зажимом 9 гибким соединением. Контактный рычаг 12 установлен на оси 14. Коммутация осуществляется рукояткой 4, закрепленной на валу. Вал имеет пять положений в обе стороны от нулевого, которые фиксируются храповым колесом и фиксаторами. Положение контактов изменяется под действием кулачковых шайб на ролик 15 контактного рычага. При набегании гребня кулачковой шайбы на ролик 15 контактный рычаг поворачивается и контакт-детали размыкаются, при сходе ролика с гребня шайбы рычаг под действием возвратной пружины 16 замыкает контакт. Контактные элементы разделены камерой 5 из изоляционного материала, которая крепится на крышке 6 контроллера. |
УСТРОЙСТВО, ОСНОВНЫЕ ТЕХН. ХАР-КИ ПРЕДОХРАНИТЕЛЯ
Общие сведения. Предохранители – это электрические аппараты, предназначенные для защиты электрических цепей от токовых перегрузок и токов к.з. Основными элементами предохранителяявляются плавкая вставка, включаемая последовательно с защищаемой цепью, и дугогасительное устройство.
К предохранителям предъявляются следующие требования:
1) Времятоковая характеристика предохранителя должна проходить ниже, но возможно ближе к времятоковой характеристике защищаемого объекта.
2) Время срабатывания предохранителя при КЗ должно быть минимально возможным, особенно при защите полупроводниковых приборов. Предохранители должны работать с токоограничением.
3) При КЗ в защищаемой цепи предохранители должны обеспечивать селективность защиты.
4) Характеристики предохранителя должны быть стабильными, а технологический разброс их параметров не должен нарушать надежность защиты.
5) В связи с возросшей мощностью установок предохранители должны иметь высокую отключающую способность.
6)Конструкция предохранителя должна обеспечивать возможность быстрой и удобной замены плавкой вставки при ее перегорании.
Нагрев плавкой вставки при длительной нагрузке. Основной характеристикой предохранителя является времятоковая характеристика, представляющая собой зависимость времени плавления вставки от протекающего тока. Для совершенной защиты желательно, чтобы времятоковая характеристика предохранителя (кривая 1 на рис. 6.7) во всех точках шла немного ниже характеристики защищаемой цепи или объекта (кривая 2 на рис. 6.7). Однако реальная характеристика предохранителя (кривая 3) пересекает кривую 2. Поясним это. Если характеристика предохранителя соответствует кривой 1, то он будет перегорать из-за старения или при пуске двигателя. Цепь будет отключаться при отсутствии недопустимых перегрузок.
Нагрев плавкой вставки при КЗ. Если ток, проходящий через вставку, в 3… 4 раза больше номинального, то практически процесс нагрева идет адиабатически, т. е. все тепло, выделяемое плавкой вставкой, идет на ее нагрев. Время нагрева вставки до температуры плавления.
Основным параметром предохранителя при КЗ является предельный ток отключения. Это ток, который он может отключить при возвращающемся напряжении, равном наибольшему рабочему напряжению.
Высоковольтные выключатели служат для включения и отключения высоковольтных цепей по всех режимах работы электроустановок (нормальном, ненормальном, аварийном).
К выключателям предъявляются следующие требования:
надежность в работе и безопасность в обслуживании;
минимальное время отключения;
малые габариты и масса;
удобство и простота монтажа и эксплуатации;
возможность после отключения автоматического повторного включения (АПВ);
сравнительно невысокая стоимость.
Требование надежности является одним из важнейших, так как от надежной работы выключателем зависит надежность работы электроустановки и даже всей системы.
Минимальное время отключения, т.е. быстродействие выключателя весьма желательно по следующим соображениям:
снижается термическое воздействие тока КЗ на элементы электроустановки, по которой он протекает;
снижается опасность распространения аварии на другие электроустановки;
повышается устойчивость параллельной работы трансформаторов и линий электропередачи;
уменьшается опасность поражения током от прикосновения к заземленным частям при однофазном КЗ.
По принципу гашения дуги и роду дугогасящей среды выключатели подразделяются на масляные, воздушные, электромагнитные, элегазовые и вакуумные.
В настоящее время наиболее распространенными являются масляные включатели, в которых гашение дуги происходит в трансформатором масле. В малообъемных выключателях масло служит только для гашения дуги, а в многообъемных оно является еще и изолирующей средой.
В воздушных выключателях гашение дуги осуществляется струей воздуха под высоким давлением. Эти выключатели не получили распространения в железнодорожных электроустановках.
В электромагнитных выключателях гашение дуги осуществляется за счет перемещения ее в пространстве магнитным полем, то есть гашение происходит в воздушной среде.
В элегазовых выключателях гашение дуги происходит в среде шестифтористой серы SF6 (электрическом газе — сокращенно элегазе), которая активно захватывает электроны в столбе дуги.
Вакуумные выключатели осуществляют гашение дуги в вакуумной камере, где газ практически отсутствует. Эти выключатели по своим качествам наиболее близки к идеальным и поэтому в настоящее время получают все более широкое распространение.
ВРАЩАЮЩИЕ МОМЕНТЫ АСИНХРОННЫХ МАШИН
Взаимодействие тока I2 в обмотке ротора с потоком асинхронной машины Ф создает механическую силу, приводящую ротор во вращение. При определении вращающего момента, создаваемого этой силой, необходимо исходить из известного физического соотношения, согласно которому мощность, затрачиваемая на приведение тела во вращение, определяется произведением приложенного к нему момента на скорость вращения данного тела.
На ротор двигателя через вращающийся магнитный поток Ф передается некоторая электромагнитная мощность. Однако не вся мощность, переносимая на ротор магнитным потоком, расходуется на приведение его во вращение, поскольку часть ее тратится на нагревание проводников обмотки ротора.
Механическая мощность двигателя, равная разности электромагнитной мощности и мощности потерь , будет равна произведению вращающего момента на частоту вращения ротора Рмех = Мп/9,55
Механический момент двигателя зависит от трех групп величин: во-первых, что величины, определяемые конструкцией двигателя, к их числу относятся r1, r'2, x1, x'2; вовторых, величины, характеризующие напряжение, подводимое к двигателю — напряжение на его зажимах U и частота питающего напряжения f; наконец, последняя величина, определяющая момент, развиваемый двигателем, зависит от режима его работы — это скольжение s.
Помимо зависимости вращающего момента асинхронного двигателя от частоты вращения ротора большое значение имеет зависимость его от напряжения, питающего двигатель.
вращающий момент, развиваемый асинхронным двигателем, весьма чувствителен к изменению питающего напряжения. При снижении напряжения, питающего двигатель, который работает под нагрузкой, его вращающий момент снижается. В результате этого происходит понижение частоты вращения двигателя. Частота понижается (и соответственно увеличивается скольжение) до тех пор, пока вращающий момент двигателя не станет равным статическому моменту сопротивления, обусловленному приводом.
Однако если напряжение понижается очень сильно, может случиться, что максимальный вращающий момент, который развивает двигатель при данном напряжении, оказывается меньше, чем статический момент сопротивления на его валу. В этом случае происходит опрокидывание двигателя, т. е. частота вращения ротора постепенно уменьшается и в конце концов двигатель останавливается.
Преобразователи частоты Теория АЭД Моменты
Из теории мы знаем что номинальный момент двигателя это момент на валу развиваемый при номинальной мощности и номинальных оборотах вала двигателя.

Как мы выясняли ранее под номинальным моментом понимают такой момент на валу электродвигателя, величина которого постоянна при постоянной номинальной частоте вращения вала.

Ранее мы рассмотрели подробно что представляет собой пусковой момент асинхронного электрического двигателя и по каким формулам можно посчитать значение пускового момента (новая статья). В этой статье мы приведем пример расчета значение пускового момента для линейки асинхронных электродвигателей. Для расчета мы будем использовать данные которые можно получить из паспорта двигателя: номинальный момент и кратность пускового момента по отношению к номинальному. Расчет будет выполнен по формуле:
Мпуск = Мн*Кпуск
где Мпуск - пусковой момент,
Мн - номинальный момент,
Кпуск - кратность пускового момента.
Исходные данные и результаты расчета сведены в виде таблицы. В первом столбце таблицы указаны маркировки двигателей, для которых был выполнен расчет. Второй столбец содержит данные о величине номинального момента. Третий столбец содержит данные о кратности пускового момента. В четвертом столбце приведены результаты расчета пускового момента.
Таблица Результаты расчета пускового момента асинхронных двигателей с использованием паспортных данных

Прежде чем изложить и проанализировать формулы для вычисления пускового момента вспомним что это такое. Под пусковым моментом понимают момент на валу двигателя при определенных условиях. Ключевыми условиями являются равенство нулю скорости вращения ротора, установившееся значение тока и номинальное напряжение на обмотках двигателя.
Для начала вспомнить что в теории электродвигателей понимают под критическим моментом. Момент критический - это максимально возможный момент на валу электродвигателя при достижении которого электродвигатель останавливается.
Подробнее про критический момент асинхронного двигателя.
Для определения численного значения критического момента можно использовать формулу:
Мкр = Мн*П
В некоторых механизмах на начальном этапе запуска привода необходимо обеспечить максимальный пусковой момент. Для решения этой задачи хорошо подходит асинхронный двигатель с фазным ротором. Кратко опишем, что он собой представляет. Асинхронный электродвигатель с фазным ротором имеет ротор, в пазы которого уложена обмотка. Тип соединения обмотки ротора "звезда". Концы фаз обмотки ротора подключают к специальным контактным кольцам. Кольца вращаются вместе с валом двигателя. В цель обмоток ротора может быть включен реостат для пуска и регулирования. Подключение реостата выполняется с помощью щеточного контакта скользящего по кольцам. Данный реостат является добавочным активным сопротивлением. Это сопротивление одинаково для каждой из фаз обмотки.
Благодаря возможности включения реостата в обмотку ротора в данных двигателях имеется возможность обеспечивать максимальное значение пускового момента уже на этапе запуска двигателя. При этом удается снизить пусковые токи. Эти двигатели используют для приводов механизмов с высокими требованиями к уровню пускового момента (например, пуск под нагрузкой).
Дополнительная информация о пусковом моменте асинхронного двигателя
Важным понятием в области физики твердого тела является понятие крутящего момента. Особое значение имеет это понятия в области электропривода. В этой статье мы разберем базовые понятия, связанные с крутящим моментом.
Для начала заметим, что крутящий момент часто называют так же моментом силы, вращательным моментов, вертящим моментом и вращающим моментом. Все эти термины являются синонимами. Хотя в некоторых практических приложениях их следует различать. Например, в технических задачах под "вращающим моментом" понимают внешнее усилие, прикладываемое к объекту, а под "крутящим моментом" понимают внутренние усилия, которые возникают в объекте под действием приложенных нагрузок. В нашей статье мы будем использовать термин крутящий момент.
Момент нагрузки – момент, создаваемый вращающейся механической системой присоединенной к валу асинхронного двигателя. В качестве синонимов в литературе встречается термин момент сопротивления. Момент нагрузки зависит от геометрических и физических параметров тел входящих в кинематическую цепь, присоединенную к валу двигателя. Как правило, при расчете момент сопротивления принято приводить к валу двигателя.
Тормозной момент – момент, развиваемый асинхронной машиной, в режиме торможения. В литературе встречается термин синоним: тормозящий момент. В рамках теории асинхронных электродвигателей рассматривают 3 режима торможения: генераторное, динамическое и торможение противовключением.

Критический момент асинхронного двигателя – наибольшее значение момента развиваемое электродвигателем. Этого значения момент достигает при критическом скольжении. Если момент нагрузки на валу двигателя будет больше критического момента, то двигатель остановится.

Номинальный момент асинхронного двигателя – момент, возникающий на валу двигателя при номинальной мощности и номинальных оборотах. Под номинальными данными понимают данные, которые определяются при работе двигателя в режиме, для которого он был спроектирован и изготовлен.

Пусковой момент на валу асинхронника – вращающий момент, который развивает на валу электрический асинхронный двигателя при следующих условиях: скорость вращения равна нулю (ротор неподвижен), ток имеет установившееся значение, к обмоткам электродвигателя подведено номинальное по частоте и напряжению питание, соединение обмоток соответствует номинальному режиму работы электродвигателя.

Электромагнитный момент – момент, возникающий на валу электродвигателя при протекании по его обмоткам электрического тока. В литературе встречаются синонимы этого термина: вращающий момент двигателя или крутящий момент электродвигателя. Так же часто попадаются вариации с более развернутой формулировкой: электромагнитный вращающий момент или электромагнитный крутящий момент.

В рамках современной теории асинхронных электрических машин применяют ряд терминов связанных с понятием момента. Часть этих терминов относится к моменту создаваемому на валу (на роторе) электродвигателя. Другая группа терминов определяет моменты создаваемые механической нагрузкой подключенной к валу электрического двигателя.
Эти термины определяют как сам момент развиваемый двигателем, так и различный состояния момента на выходном валу двигателя. Под состоянием подразумевается значение момента в кретических точках. Например номинальный момент или пусковой момент.
Механические и электрические характеристики асинхронных электродвигателей
В данной статье осветим тему механических и электрических характеристик электродвигателей. На примере асинхронного двигателя рассмотрим такие параметры как мощность, работа, КПД, косинус фи, вращающий момент, угловая скорость, линейная скорость и частота. Все эти характеристики оказываются важными при проектировании оборудования, в котором электродвигатели служат в качестве приводных.
Механические характеристики электродвигателя представляют собой зависимость угловой скорости ω от развиваемого им момента на валу, т.е. ω = f (M). Различают естественные и искусственные механические характеристики электродвигателя.
Естественная механическая характеристика соответствует работе электродвигателя с номинальными параметрами при нормальной схеме включения. Искусственная механическая характеристика соответствует работе электродвигателя с параметрами, отличающимися от номинальных, например, при введении сопротивления, изменении питающего напряжения, частоты и др.
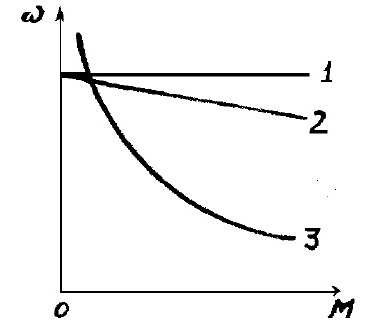
Механические характеристики электродвигателей: 1 - абсолютно жесткая характеристика, 2 - жесткая характеристика, 3 - мягкая механическая характеристика
Сегодня особенно широко распространены в промышленности именно асинхронные электродвигатели, поэтому на их характеристиках и остановимся.
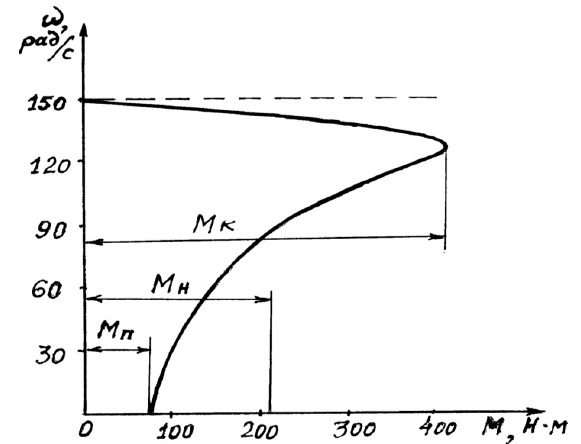
Естественная механическая характеристика асинхронного двигателя
Для примера рассмотрим АИР80В2У3.

Номинальная механическая мощность асинхронного электродвигателя
На шильдике (на паспортной табличке) электродвигателя указывается всегда номинальная механическая мощность на валу данного двигателя. Это не та электрическая мощность, которую данный электродвигатель потребляет из сети.
Так, например, для двигателя АИР80В2У3, номинал в 2200 ватт соответствует именно механической мощности на валу. То есть в оптимальном рабочем режиме данный двигатель способен выполнять механическую работу 2200 джоулей каждую секунду. Обозначим эту мощность как P1 = 2200 Вт.

Номинальная активная электрическая мощность асинхронного электродвигателя
Чтобы определить номинальную активную электрическую мощность асинхронного электродвигателя, опираясь на данные с шильдика, необходимо принять в расчет КПД. Так, для данного электродвигателя КПД составляет 83%.

Что это значит? Это значит, что только часть активной мощности, подаваемой из сети на обмотки статора двигателя, и безвозвратно потребляемой двигателем, преобразуется в механическую мощность на валу. Активная мощность равна P = P1/КПД. Для нашего примера, по представленному шильдику видим, что P1 = 2200, КПД = 83%. Значит P = 2200/0,83 = 2650 Вт.
Номинальная полная электрическая мощность асинхронного электродвигателя
Полная электрическая мощность, подаваемая на статор электродвигателя от сети всегда больше механической мощности на валу и больше активной мощности, безвозвратно потребляемой электродвигателем.

Для нахождения полной мощности достаточно активную мощность разделить на косинус фи. Таким образом, полная мощность S = P/Cosφ. Для нашего примера P = 2650 Вт, Cosφ = 0,87. Следовательно полная мощность S = 2650/0,87 = 3046 ВА.
Номинальная реактивная электрическая мощность асинхронного электродвигателя
Часть полной мощности, подаваемой на обмотки статора асинхронного электродвигателя, возвращается в сеть. Это реактивная мощность Q.
Реактивная мощность связана с полной мощностью через sinφ, и связана с активной и с полной мощностью через квадратный корень. Для нашего примера:
Q = √( 3046 2 - 2650 2 ) = 1502 ВАР
Реактивная мощность Q измеряется в ВАР — в вольт-амперах реактивных.
Теперь давайте рассмотрим механические характеристики нашего асинхронного двигателя: номинальный рабочий момент на валу, угловую скорость, линейную скорость, частоту вращения ротора и ее связь с частотой питания электродвигателя.
Частота вращения ротора асинхронного электродвигателя
Скорость вращательного движения на практике часто оценивается частотой вращения, то есть числом оборотов вала двигателя в минуту. Угловая скорость выражается в радианах в секунду (рад/с). Угловой скоростью удобнее пользоваться при выводе формул и проведении расчетов, частотой вращения - при практической оценке скоростных свойств двигателей.
На шильдике мы видим, что при питании переменным током частотой в 50 Гц, ротор двигателя совершает при номинальной нагрузке 2870 оборотов в минуту, обозначим эту частоту как n1.

Но поскольку двигатель асинхронный, то п оявление в обмотке ротора ЭДС и вращающего момента возможно только при наличии разности между скоростями магнитного поля и ротора. Это различие называют скольжением (s). Ротор вращается с отставанием на величину скольжения .
Значение s можно определить, разделив разность синхронной и асинхронной частот на синхронную частоту, и выразив это значение в процентах:
s = ( ( n – n1 )/ n) *100%
Для нашего примера s = ( (3000 – 2870)/3000 ) *100% = 4,3%.
Угловая скорость асинхронного двигателя

Угловая скорость ω выражается в радианах в секунду. Для определения угловой скорости достаточно частоту вращения ротора n1 перевести в обороты в секунду (f), и умножить на 2 Пи, поскольку один полный оборот составляет 2 Пи или 2*3,14159 радиан. Для двигателя АИР80В2У3 асинхронная частота n1 составляет 2870 оборотов в минуту, что соответствует 2870/60 = 47,833 оборотам в секунду.
Умножая на 2 Пи, имеем: 47,833*2*3,14159 = 300,543 рад/с. Можно перевести в градусы, для этого вместо 2 Пи подставить 360 градусов, тогда для нашего примера получится 360*47,833 = 17220 градусов в секунду. Однако подобные расчеты обычно ведут именно в радианах в секунду. Поэтому угловая скорость ω = 2*Пи*f, где f = n1/60.
Линейная скорость асинхронного электродвигателя
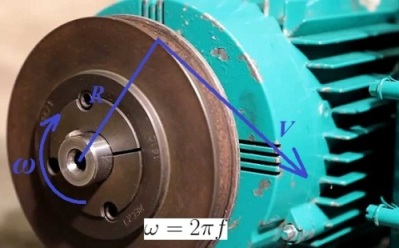
Линейная скорость v относится к оборудованию, на котором асинхронный двигатель установлен в качестве привода. Так, если на вал двигателя установлен шкив или, скажем, наждачный диск, известного радиуса R, то линейная скорость точки на краю шкива или диска может быть найдена по формуле:
Номинальный вращающий момент асинхронного двигателя
Каждый асинхронный электродвигатель характеризуется номинальным вращающим моментом Мн. Вращающий момент М связан с механической мощностью P1 через угловую скорость следующим образом:
Вращающий момент или момент силы, действующей на определенном расстоянии от центра вращения, для двигателя сохраняется, причем с ростом радиуса уменьшается сила, а чем радиус меньше, тем больше сила, поскольку:
Так, чем больше радиус шкива, тем меньшая сила действует на его краю, а наибольшая сила действует непосредственно на валу электродвигателя.

Для приведенного в качестве примера двигателя АИР80В2У3 мощность P1 равна 2200 Вт, а частота n1 равна 2870 оборотов в минуту или f = 47,833 оборота в секунду. Следовательно угловая скорость составляет 2*Пи*f, то есть 300,543 рад/с, и номинальный вращающий момент Мн равен P1/(2*Пи*f). Мн = 2200/(2*3,14159*47,833) = 7,32 Н*м.
Таким образом, исходя из данных, указанных на шильдике асинхронного электродвигателя, можно найти все основные электрические и механические его параметры.
Надеемся, что данная статья помогла вам разобраться в том, как связаны между собой угловая скорость, частота, вращающий момент, активная, полезная и полная мощность, а также КПД электродвигателя.
Вращающий момент асинхронной машины создается вследствие взаимодействия вращающегося магнитного поля статора с током в проводниках обмотки ротора. Поэтому вращающий момент пропорционален величине магнитного потока статора Ф и силе тока в обмотке ротора I2. В процессе преобразования энергии (создания вращающего момента) принимает участие только активная мощность потребляемая машиной от питающей сети. Поэтому вращающий момент определяется только активной составляющей тока ротора I2cosψ2. Следовательно вращающий момент двигателя
где с – конструктивная постоянная машины, которая зависит от числа ее полюсов, числа витков обмотки статора и конструктивного выполнения обмотки ротора.
Подставляя в (2.42) значения I2 и cosψ2 из (2.40 и 2.41) получим
Анализ выражений (2.42), (2.43) показывает, что при малых значениях скольжения вращающий момент растет примерно пропорционально скольжению. При значительном увеличении скольжения момент начинает убывать, так как знаменатель в выражении (2,43) начинает расти быстрее числителя. Это объясняется тем, что с увеличением скольжения растет скорость вращения магнитного поля относительно ротора n' , а значит растет частота f2 , ЭДС индуктируемая в роторе E2s и ток в обмотке ротора I2 . Но одновременно, с увеличением частоты f2 растет индуктивное сопротивление обмотки ротора x2, а значит и угол сдвига фаз ψ2 между ЭДС Е2 и током в роторе, а cosψ2 - уменьшается. Зависимость вращающегося момента от скольжения имеет вид, приведенный на рис. 2.28.
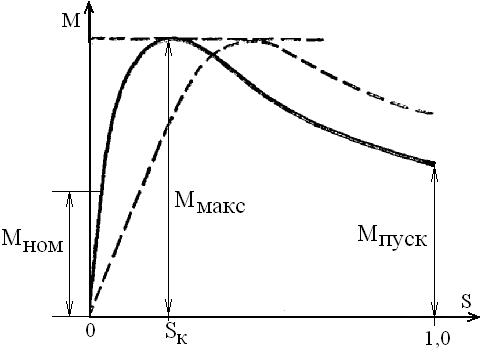
Рисунок 2.28 – Вращающий момент двигателя в функции скольжения
Скольжение, при котором вращающий момент имеет максимальное значение, называется критическим.
Устойчивая работа двигателя возможна только на восходящей ветви кривой зависимости М = f(s), то есть при S М, что приведет к уменьшению n и увеличению S. Вращающий момент двигателя будет возрастать до восстановления равенства М = МН . Аналогично процесс регулирования протекает при уменьшении момента нагрузки.
На нисходящей ветви кривой зависимости М = f(s) любое возрастание момента нагрузки или уменьшение вращающего момента, приводящее к уменьшению n и увеличению S, будет сопровождаться дальнейшим уменьшением вращающего момента и частоты вращения двигателя до полной его остановки.
Учитывая, что и ЭДС, индуктируемая в обмотке ротора, и вращающий момент пропорциональны магнитному потоку статора, а этот магнитный поток пропорционален напряжению питания U1, можно получить следующую зависимость вращающего момента от скольжения
Так как вращающий момент пропорционален квадрату напряжения питания, то асинхронные двигатели очень чувствительны к понижению напряжения сети.
Анализируя выражение (2.44) можно определить максимальный вращающий момент и критическое скольжение
Из выражений (2.45, 2.46) следует, что максимальный момент двигателя не изменяется при изменении активного сопротивления в цепи ротора, однако при этом меняется критическое скольжение. Зависимость M(s) при увеличенном активном сопротивлении ротора показана на рис. 2.28 штриховой линией.
Магнитное поле статора индуктирует в статорной обмотке ЭДС Е1, которая уравновешивает приложенное напряжение U1. Если пренебречь падением напряжения на активном сопротивлении обмотки статора, которое очень мало по сравнению с ЭДС Е1, то можно считать, что выполняется приближенное равенство U1 ≈ Е1.
Следовательно, при постоянном напряжении питания практически неизменной будет и ЭДС статорной обмотки. Магнитный поток в воздушном зазоре машины, как и в трансформаторе, при любых изменениях нагрузки остается почти постоянным.
Ток обмотки ротора создает магнитное поле, направленное встречно магнитному полю обмотки статора. Чтобы результирующий магнитный поток в машине оставался постоянным при любых изменениях нагрузки двигателя, размагничивающее магнитное поле обмотки ротора должно бать уравновешено изменением магнитного поля статорной обмотки. Поэтому при увеличении силы тока в обмотке ротора в асинхронном двигателе, как и в трансформаторе, соответственно возрастает и сила тока в статорной обмотке.

Вращающий момент асинхронной машины создается вследствие взаимодействия вращающегося магнитного поля статора с током в проводниках обмотки ротора. Поэтому вращающий момент пропорционален величине магнитного потока статора Ф и силе тока в обмотке ротора I2. В процессе преобразования энергии (создания вращающего момента) принимает участие только активная мощность потребляемая машиной от питающей сети. Поэтому вращающий момент определяется только активной составляющей тока ротора I2cosψ2. Следовательно вращающий момент двигателя
где с – конструктивная постоянная машины, которая зависит от числа ее полюсов, числа витков обмотки статора и конструктивного выполнения обмотки ротора.
Подставляя в (2.42) значения I2 и cosψ2 из (2.40 и 2.41) получим
Анализ выражений (2.42), (2.43) показывает, что при малых значениях скольжения вращающий момент растет примерно пропорционально скольжению. При значительном увеличении скольжения момент начинает убывать, так как знаменатель в выражении (2,43) начинает расти быстрее числителя. Это объясняется тем, что с увеличением скольжения растет скорость вращения магнитного поля относительно ротора n' , а значит растет частота f2 , ЭДС индуктируемая в роторе E2s и ток в обмотке ротора I2 . Но одновременно, с увеличением частоты f2 растет индуктивное сопротивление обмотки ротора x2, а значит и угол сдвига фаз ψ2 между ЭДС Е2 и током в роторе, а cosψ2 - уменьшается. Зависимость вращающегося момента от скольжения имеет вид, приведенный на рис. 2.28.
Рисунок 2.28 – Вращающий момент двигателя в функции скольжения
Скольжение, при котором вращающий момент имеет максимальное значение, называется критическим.
Устойчивая работа двигателя возможна только на восходящей ветви кривой зависимости М = f(s), то есть при S М, что приведет к уменьшению n и увеличению S. Вращающий момент двигателя будет возрастать до восстановления равенства М = МН . Аналогично процесс регулирования протекает при уменьшении момента нагрузки.
На нисходящей ветви кривой зависимости М = f(s) любое возрастание момента нагрузки или уменьшение вращающего момента, приводящее к уменьшению n и увеличению S, будет сопровождаться дальнейшим уменьшением вращающего момента и частоты вращения двигателя до полной его остановки.
Учитывая, что и ЭДС, индуктируемая в обмотке ротора, и вращающий момент пропорциональны магнитному потоку статора, а этот магнитный поток пропорционален напряжению питания U1, можно получить следующую зависимость вращающего момента от скольжения
Так как вращающий момент пропорционален квадрату напряжения питания, то асинхронные двигатели очень чувствительны к понижению напряжения сети.
Анализируя выражение (2.44) можно определить максимальный вращающий момент и критическое скольжение
Из выражений (2.45, 2.46) следует, что максимальный момент двигателя не изменяется при изменении активного сопротивления в цепи ротора, однако при этом меняется критическое скольжение. Зависимость M(s) при увеличенном активном сопротивлении ротора показана на рис. 2.28 штриховой линией.
Магнитное поле статора индуктирует в статорной обмотке ЭДС Е1, которая уравновешивает приложенное напряжение U1. Если пренебречь падением напряжения на активном сопротивлении обмотки статора, которое очень мало по сравнению с ЭДС Е1, то можно считать, что выполняется приближенное равенство U1 ≈ Е1.
Следовательно, при постоянном напряжении питания практически неизменной будет и ЭДС статорной обмотки. Магнитный поток в воздушном зазоре машины, как и в трансформаторе, при любых изменениях нагрузки остается почти постоянным.
Ток обмотки ротора создает магнитное поле, направленное встречно магнитному полю обмотки статора. Чтобы результирующий магнитный поток в машине оставался постоянным при любых изменениях нагрузки двигателя, размагничивающее магнитное поле обмотки ротора должно бать уравновешено изменением магнитного поля статорной обмотки. Поэтому при увеличении силы тока в обмотке ротора в асинхронном двигателе, как и в трансформаторе, соответственно возрастает и сила тока в статорной обмотке.
Вращающий момент асинхронного электродвигателя пропорционален квадрату напряжения в сети; если при понижении напряжения в сети на 10 % оно составит 0 9 от номинального значения ( 0 9 UH то вращающий момент составит ( 0 9) 2 0 81 от номинального. [1]
Вращающий момент асинхронных электродвигателей зависит от квадрата напряжения сети. Это значит, что асинхронные электродвигатели очень чувствительны к колебаниям напряжения, которые вызывают значительные колебания вращающего момента, а следовательно, и скорости электродвигателя. [2]
Вращающий момент асинхронного электродвигателя при любом скольжении обычно выражают в долях его номинального момента М ом. [3]
Величина вращающего момента асинхронного электродвигателя зависит от напряжения питающей сети. Снижение напряжения сопровождается уменьшением вращающего момента. [4]
Из записанных формул видно, что вращающий момент асинхронного электродвигателя пропорционален квадрату подведенного напряжения и зависит от величины скольжения. [5]
В каких случаях можно полагать, что вращающий момент асинхронного электродвигателя и скольжение связаны прямо пропорциональной зависимостью. [6]
Так, например, при снижении напряжения на 10 % вращающий момент асинхронных электродвигателей уменьшается на 19 %, пропорционально квадрату напряжения, а следовательно, соответственно уменьшается и производительность приводимого механизма. [7]
Так, например, при снижении напряжения на 10 % вращающий момент асинхронных электродвигателей уменьшается на 19 %, пропорционально квадрату напряжения, следовательно, уменьшается и производительность приводимого механизма. [8]
Так, например, при снижении напряжения на 10 % вращающий момент асинхронных электродвигателей уменьшается на 19 %, соответственно уменьшается и производительность приводимого механизма. В осветительных установках снижение напряжения на 5 % вызывает снижение на 17 5 % световой отдачи. [10]
Так, например, при снижении напряжения на 10 % вращающий момент асинхронных электродвигателей уменьшается на 19 % пропорционально квадрату напряжения, а следовательно, соответственно уменьшается и производительность приводимого механизма. [12]
Особенностью механической характеристики, справедливой для электродвигателей с неизменными и с переменными параметрами ( с глубоким пазом, с двойной беличьей клеткой), является прямая зависимость вращающего момента асинхронного электродвигателя от квадрата напряжения на его зажимах. [13]
При пуске сдвиг фаз имеет наибольшую величину и по мере увеличения скорости ротора сдвиг фаз уменьшается. Как мы увидим сейчас, это обстоятельство сильно сказывается на величине вращающего момента асинхронного электродвигателя . [14]
В номинальном и близком к нему режиме согласно [ 39, с. При этих условиях оказывается а е2Нс - Очевидно, что при коэффициентах несимметрии, встречающихся в практике ( еНс О 05 - 4 - 0 06), снижение вращающего момента асинхронного электродвигателя оказывается пренебрежимо малым. [15]
Читайте также:
- План урока части речи
- Что должно быть в папке по безопасности в доу
- 11 исследование патологии психической деятельности при шизофрении в школе ю ф полякова
- Могли ли быть счастливы обломов и ольга кратко
- Назовите научные открытия которые легли в основу революции в естествознании в чем их значение кратко