
От чего зависит потенциальная энергия упруго деформированного тела ответ кратко
Обновлено: 30.06.2024
Деформированное упругое тело (например, растянутая или сжатая пружина) способно, возвращаясь в недеформированное состояние, совершить работу над соприкасающимися с ним телами. Следовательно, упруго деформированное тело обладает потенциальной энергией. Она зависит от взаимного положения частей тела, например витков пружины. Работа, которую может совершить растянутая пружина, зависит от начального и конечного растяжений пружины. Найдем работу, которую может совершить растянутая пружина, возвращаясь к нерастянутому состоянию, т. е. найдем потенциальную энергию растянутой пружины.
Пусть растянутая пружина закреплена одним концом, а второй конец, перемещаясь, совершает работу. Нужно учитывать, что сила, с которой действует пружина, не остается постоянной, а изменяется пропорционально растяжению. Если первоначальное растяжение пружины, считая от нерастянутого состояния, равнялось , то первоначальное значение силы упругости составляло , где — коэффициент пропорциональности, который называют жесткостью пружины. По мере сокращения пружины эта сила линейно убывает от значения до нуля. Значит, среднее значение силы равно . Можно показать, что работа равна этому среднему, умноженному на перемещение точки приложения силы:
Таким образом, потенциальная энергия растянутой пружины
Такое же выражение получается для сжатой пружины.
В формуле (98.1) потенциальная энергия выражена через жесткость пружины и через ее растяжение . Заменив на , где — упругая сила, соответствующая растяжению (или сжатию) пружины , получим выражение
которое определяет потенциальную энергию пружины, растянутой (или сжатой) силой . Из этой формулы видно, что, растягивая с одной и той же силой разные пружины, мы сообщим им различный запас потенциальной энергии: чем жестче пружина, т.е. чем больше ее упругость, тем меньше потенциальная энергия; и наоборот: чем мягче пружина, тем больше энергия, которую она запасет при данной растягивающей, силе. Это можно уяснить себе наглядно, если учесть, что при одинаковых действующих силах растяжение мягкой пружины больше, чем жесткой, а потому больше и произведение силы на перемещение точки приложения силы, т. е. работа.
Эта закономерность имеет большое значение, например, при устройстве различных рессор и амортизаторов: при посадке на землю самолета амортизатор шасси, сжимаясь, должен произвести большую работу, гася вертикальную скорость самолета. В амортизаторе с малой жесткостью сжатие будет больше, зато возникающие силы упругости будут меньше и самолет будет лучше предохранен от повреждений. По той же причине при тугой накачке шин велосипеда дорожные толчки ощущаются резче, чем при слабой накачке.
© 2022 Научная библиотека
Копирование информации со страницы разрешается только с указанием ссылки на данный сайт
Потенциальная энергия имеется у системы взаимодействующих тел. Но отдельное деформированное тело также обладает такого типа энергией. В таком случае потенциальная энергия зависит от взаимного расположения частей тела.
Энергия упругой деформации
Если груз, подвешенный на проволоке, растягивает подвес и опускается, значит, сила тяжести совершает работу. За счет такой работы увеличивается энергия деформированного тела, которое перешло из ненапряженного состояния в напряженное. Получается, что при деформации внутренняя энергия тела увеличивается. Рост внутренней энергии тела заключается в увеличении потенциальной энергии, которая связана со взаимным расположением молекул тела. Если мы имеем дело с упругой деформацией, то после снятия нагрузки, дополнительная энергия исчезает, и за ее счет силы упругости совершают работу. В ходе упругой деформации температура твердых тел существенно не увеличивается. В этом состоит их значительное отличие от газов, которые при сжатии нагреваются. При пластической деформации твердые тела могут значительно увеличивать свою температуру. В повышении температуры, следовательно, кинетической энергии молекул, отражается рост внутренней энергии тела при пластической деформации. При этом увеличение внутренней энергии происходит также за счет работы сил, вызывающих деформацию.
Для того чтобы растянуть или сжать пружину следует выполнить работу ( ) равную:
![\[A=\frac<kx^2></p>
<p> \qquad (1)\]](http://ru.solverbook.com/wp-content/ql-cache/quicklatex.com-11514819fa82d76ff97331e60b14a8f4_l3.jpg)
где – величина характеризующая изменение длины пружины (удлинение пружины); – коэффициент упругости пружины. Данная работа идут на изменение потенциальной энергии пружины ( ):
![\[E_p=\frac<kx^2></p>
<p>\ \qquad (2)\]](http://ru.solverbook.com/wp-content/ql-cache/quicklatex.com-65cf33a6daa9dea450000ac84638c513_l3.jpg)
При записи выражения (2) считаем, что потенциальная энергия пружины без деформации равна нулю.
Потенциальная энергия упруго деформированного стержня
Потенциальная энергия упруго деформированного стержня при его продольной деформации равна:
![\[E_p=\frac<E<\varepsilon ></p>
<p>^2>V\ \qquad (2)\]](http://ru.solverbook.com/wp-content/ql-cache/quicklatex.com-3e1b1df7e2996d79eccc8f2c654c7093_l3.jpg)
где – модуль Юнга; – относительное удлинение; – объем стержня. Для однородного стержня при равномерной его деформации плотность энергии упругой деформации можно найти как:
![\[e_p=\frac<dE_p></p>
<p>=\frac^2> \qquad (3)\]](http://ru.solverbook.com/wp-content/ql-cache/quicklatex.com-2e0648c23c4e131247aab228ac316a19_l3.jpg)
Если деформация стержня является неравномерной, то при использовании формулы (3) для поиска энергии в точке стержня в эту формулу подставляют значение для рассматриваемой точки.
Плотность энергии упругой деформации при сдвиге находят, используя выражение:
![\[e_p=\frac<G<\gamma ></p>
<p>^2> \qquad (4)\]](http://ru.solverbook.com/wp-content/ql-cache/quicklatex.com-d88266c101df15b9b32e98896c84513c_l3.jpg)
где – модуль сдвига; – относительный сдвиг.
Примеры решения задач
| Задание | Камень, имеющий массу при выстреле из рогатки начал полет со скоростью . Каков коэффициент упругости резинового шнура рогатки, если при выстреле шнур получил удлинение ? Считайте, что изменением сечения шнура можно пренебречь. |
| Решение | В момент выстрела потенциальная энергия растянутого шнура ( ) переходит в кинетическую энергию камня ( ). По закону сохранения энергии можно записать: |
Потенциальную энергию упругой деформации резинового шнура найдем как:
![\[E_p=\frac<\beta <\left(\Delta l\right)></p>
<p>^2> \qquad (1.2)\]](http://ru.solverbook.com/wp-content/ql-cache/quicklatex.com-dab7688e520ea89e477ac3bfaad3f4c0_l3.jpg)
где – коэффициент упругости резины,
кинетическая энергия камня:
![\[E_k=\frac<mv^2></p>
<p> \qquad (1.3)\]](http://ru.solverbook.com/wp-content/ql-cache/quicklatex.com-5464450d7ddf9679e966eeb3a99d7bcc_l3.jpg)
![\[\frac<\beta <\left(\Delta l\right)></p>
<p>^2>=\frac \qquad (1.4)\]](http://ru.solverbook.com/wp-content/ql-cache/quicklatex.com-3adb468c534cc2ad538c891c6a69181a_l3.jpg)
Выразим коэффициент жесткости резины из (1.4):
![\[\beta =\frac<mv^2></p>
<p><<\left(\Delta l\right)>^2>\]](http://ru.solverbook.com/wp-content/ql-cache/quicklatex.com-5d87d5bee727d3ea47861c4af4d7a76f_l3.jpg)
| Задание | Пружину, имеющую жесткость , сжимает сила, величина которой равна . Какова работа ( ) приложенной силы при дополнительном сжатии этой же пружины еще на ? |
| Решение | Сделаем рисунок. |

Работа силы по сжатию пружины равна изменению ее потенциальной энергии:
![\[A=E_<p2></p>
<p>-E_ \qquad (2.1)\]](http://ru.solverbook.com/wp-content/ql-cache/quicklatex.com-09bb9cceb7e7a9dbaf71efbaa8ac0c2b_l3.jpg)
Будем считать потенциальную энергию не сжатой пружины равной нулю, тогда:
![\[E_<p1></p>
<p>=\frac^2>;\ E_=\frac^2> \qquad \left(2.2\right) \]](http://ru.solverbook.com/wp-content/ql-cache/quicklatex.com-f03ddadae42bc8aa3931e6205456b7d0_l3.jpg)
Используя закон Гука:
![\[\left|F\right|=\left|F_<upr></p>
<p>\right|=k\Delta l\ \qquad (2.3)\]](http://ru.solverbook.com/wp-content/ql-cache/quicklatex.com-e98a1f6c171f3aa4b666662a60e9863a_l3.jpg)
выразим коэффициент жесткости пружины как:
![\[k=\frac<F></p>
<p> \qquad (2.4)\]](http://ru.solverbook.com/wp-content/ql-cache/quicklatex.com-c3531726ce156903f0466e04634da15b_l3.jpg)
Используя выражения (2.2) найдем работу силы при дополнительном сжатии пружины:
![\[A=\frac<k\ <\left(\Delta l+\Delta x\right)></p>
<p>^2>-\frac^2>=\frac\left[<\left(\Delta l\right)>^2+2\Delta l\Delta x+<\left(\Delta x\right)>^2-<\left(\Delta l\right)>^2\right]=\]](http://ru.solverbook.com/wp-content/ql-cache/quicklatex.com-09936094ff5e46bf8d599fb2d15e0254_l3.jpg)
![\[=\frac<k></p>
<p>\left(2\Delta l\Delta x+<\left(\Delta x\right)>^2\right)=\frac^2>\]](http://ru.solverbook.com/wp-content/ql-cache/quicklatex.com-437746549d783939f17dafa23cfbdb3f_l3.jpg)
Потенциальная энергия - энергия взаимодействия тел или частей тела.Потенциальная энергия (от латинского potentia - возможность) определяется взаимным расположением тел или частей тела, т.е. расстояниями между ними.
Потенциальная энергия тела, поднятого над Землей. Работа силы тяжести.
Пусть тело свободно падает с высоты h1 над уровнем Земли на уровень h2.
При падении сила тяжести совершает положительную работу, при движении тела вверх - отрицательную.
Величину Eз = mgh называют потенциальной энергией взаимодействия тела и Земли.

Т.о. A = - (Ep2 - Ep1) = -ΔEp Работа сила тяжести равна изменению потенциальной энергии, взятому с противоположным знаком. Т.е., если потенциальная энергия увеличивается (тело поднимается), то сила тяжести совершает отрицательную работу и наоборот.
Eз = mgh
A = - (Ep2 - Ep1) = -ΔEp
Т.к. потенциальная энергия определяется координатой, то величина потенциальной энергии определяется выбором системы координат (выбором нулевого уровня). Т.е. она определяется с точностью до постоянной величины. В данной задаче удобно за точку отсчета выбирать уровень Земли.
Если тело движется под углом к направлению вектора силы тяжести, то, как видно из рисунка, работа силы тяжести независимо от траектории определяется изменением положения тела (на рис. - высотой наклонной плоскости h).
Если тело движется по произвольной траектории, то ее можно представить в виде суммы горизонтальных участков, на которых работа силы тяжести равна нулю, и вертикальных, на которых суммарная работа будет равна А=mgh.
Работа силы тяжести не зависит от формы траектории и определяется только начальным и конечным положением тела.
На замкнутой траектории работа силы тяжести равна нулю, т.к. потенциальная энергия не меняется.

Потенциальная энергия тел, взаимодействующих посредством гравитационных сил.

, где r- расстояние между взаимодействующими телами.
Знак "-" говорит о том, что это энергия притягивающихся тел.
При сближении тел потенциальная энергия увеличивается по модулю.

Работа по сближению двух астрономических объектов: .

Потенциальная энергия упруго деформированного тела. Работа силы упругости.
Для вывода формулы используем, что работа численной равна площади под графиком зависимости силы от координаты. При малых упругих деформациях сила упругости прямо пропорциональна абсолютной деформации (з-н Гука) - см. рис.

Тогда работа при изменении деформации от х1 до х2 равна: .

Учитывая з-н Гука, получим:

Т.о., если принять за потенциальную энергию упруго деформированного тела величину ,

где k - коэффициент жесткости, а х - абсолютная деформация тела, то можно сделать вывод , что ,
т.е. работа силы при деформации тела равна изменению потенциальной энергии этого тела, взятой с обратным знаком.
Работа силы упругости зависит только от координат (начальной и конечной деформаций) тела и, следовательно, не зависит от траектории. Работа по замкнутой траектории равна нулю.
Консервативными (сохраняющими) наз. силы, работа которых не зависит от траектории и по замкнутой траектории равна нулю (эти силы не зависят от скоростей). Примеры: гравитационные, упругие.
Диссипативными (рассеивающими) наз. силы, работа которых зависит от траектории и по замкнутой траектории не равна нулю (такие силы зависят от скорости). Пример: сила трения.
Потенциальная энергия – это энергия взаимодействия тел.
Потенциальная энергия поднятого над Землей тела – это энергия взаимодействия тела гравитационными силами. Потенциальная энергия упруго деформированного тела – это энергия взаимодействия отдельных частей тела между собой силами упругости.
Потенциальными называются силы, работа которых зависит только положения движущейся материальной точки или тела и траектории.
При замкнутой траектории работа потенциальной силы всегда равна нулю. силам относятся силы тяготения, силы упругости, электростатические силы другие.
Силы, работа которых зависит траектории, называются непотенциальными. При перемещении материальной точки или тела по замкнутой траектории работа непотенциальной силы нулю.
Потенциальная энергия взаимодействия тела
Найдем работу, совершаемую силой тяжести Fт при перемещении тела массой т вертикально вниз h1 над поверхностью Земли h2

Если разность h1 – h2 пренебрежимо мала по сравнению Земли, то силу тяжести Fт движения тела можно считать постоянной mg.
Так как перемещение совпадает по направлению силы тяжести, работа силы тяжести равна
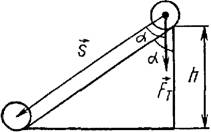
Рассмотрим теперь движение тела по наклонной плоскости. тела вниз по наклонной плоскости сила тяжести Fт = mg совершает работу
где h – высота наклонной плоскости, s – модуль перемещения, равный длине наклонной плоскости.
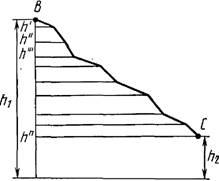
Движение тела В С по любой траектории можно мысленно представить состоящим по участкам наклонных плоскостей высотами h', h" Работа А силы тяжести пути из В в С равна сумме работ участках пути:
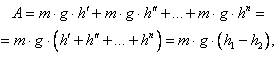
(7)
где h1 и h2 – высоты Земли, расположены соответственно точки В и С.
Равенство (7) показывает, что работа силы тяжести движения тела равна произведению модуля силы тяжести высот положениях.
При движении вниз работа силы тяжести положительна, при движении вверх – отрицательна. Работа силы тяжести траектории равна нулю .
Равенство (7) можно представить виде:
Физическую величину, равную произведению массы тела ускорения свободного падения и поднято тело над поверхностью Земли, называют потенциальной энергией взаимодействия тела
Работа силы тяжести при перемещении тела массой т расположенной h2, расположенную h1 Земли, по любой траектории равна изменению потенциальной энергии взаимодействия тела взятому знаком.
Потенциальная энергия обозначается буквой Ер.
Значение потенциальной энергии тела, поднятого над Землей, зависит нулевого уровня, высоты, потенциальная энергия принимается равной нулю. Обычно принимают, что потенциальная энергия тела Земли равна нулю.
При таком выборе нулевого уровня потенциальная энергия Ер тела, находящегося h над поверхностью Земли, равна произведению массы m тела ускорения свободного падения g h его Земли:
Физический смысл потенциальной энергии взаимодействия тела
потенциальная энергия тела, действует сила тяжести, равна работе, совершаемой силой тяжести при перемещении тела уровень.
В отличие энергии поступательного движения, которая может иметь лишь положительные значения, потенциальная энергия тела может быть как положительной, так m, находящееся h, где h
Потенциальная энергия гравитационного взаимодействия
Потенциальная энергия гравитационного взаимодействия системы двух материальных точек т и М, находящихся r одна равна
(11)
где G – гравитационная постоянная, отсчета потенциальной энергии (Еp = 0) принят при r = ?. Потенциальная энергия гравитационного взаимодействия тела массой т где h – высота тела над поверхностью Земли, М3 – масса Земли, R3 – радиус Земли, отсчета потенциальной энергии выбран при h = 0.
(12)
При условии выбора нуля отсчета потенциальная энергия гравитационного взаимодействия тела массой т для малых высот h (h « R3) равна

где – модуль ускорения свободного падения вблизи поверхности Земли.
Потенциальная энергия упруго деформированного тела
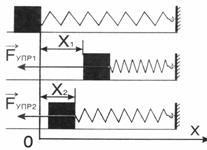
Вычислим работу, совершаемую силой упругости при изменении деформации (удлинения) пружины начального значения x1 значения x2 б, в).
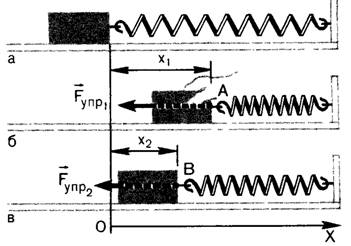
Сила упругости изменяется деформации пружины. работы силы упругости можно взять среднее значение модуля силы сила упругости линейно зависит от x) перемещения:
(13)
где Отсюда
![]()
(14)
Физическая величина, равная половине произведения жесткости тела его деформации, называется потенциальной энергией упруго деформированного тела:

(15)
Из формул (14) и (15) следует, что работа силы упругости равна изменению потенциальной энергии упруго деформированного тела, взятому знаком:
Тогда физический смысл потенциальной энергии деформированного тела
потенциальная энергия упруго деформированного тела равна работе, которую совершает сила упругости при переходе тела деформация равна нулю.
Читайте также: