
Какими тремя параметрами обладают воздушные винты у квадрокоптера кратко
Обновлено: 05.07.2024
Винты для квадрокоптера – это детали, от которых во многом зависит работа техники. Их размер, форма, материал и другие характеристики определяют особенности движения технического устройства. Одни винты устанавливают, если необходим плавный полет для съемки видео, другие – если требуется быстрое перемещение для соревнований. Дополнительная функция пропеллеров – защита квадрокоптера от перегрева мотора.

Что нужно знать при выборе винтов для квадрокоптера: основные определения и понятия
В первую очередь необходимо обращать внимание на:
- параметры длины;
- размер шага;
- площадь винтов;
- направленность работы;
- форму деталей;
- количество лопастей.
Нужно разбираться и в терминологии, которая используется для указания тех или иных характеристик летающего аппарата:

Длина пропеллера и его шаг
Сила тяги зависит от диаметра, образуемого лопастями диска, и шага движения. Если сила тяги квадрокоптера высокая, системы пропеллеров перемещают крупные объемы воздушной смеси. Если увеличить шаг или длину и оставить прежней скорость вращения винта, тяга существенно вырастет. Повысится сопротивление воздушной смеси, и появится турбулентность. В результате слишком высокие показатели длины и шага приведут к увеличенным затратам энергии, снизится длительность полета на одном заряде.

Определиться с выбором по данной характеристике лучше всего, исходя из целей использования квадрокоптера:
- Для фото и видеосъемки. Рекомендуется установить винты с большой длиной и коротким шагом.
- Для гоночных соревнований. Менее плавное, но быстрое движение требует кардинально противоположной расстановки: малая длина и большой шаг.
Количество и форма лопастей пропеллеров
Обычно на квадрокоптеры стандартного размера устанавливают пропеллеры с двумя лопастями. Для миниатюрной техники уже нужны узлы с большим количеством лопастей, что позволит контролировать силу потоков воздуха и придерживаться плавности полета.

Чем больше винтов установлено, тем выше показатель отзывчивости. Но есть и минусы: такие аппараты стоят дороже и сложны в процессе отцентровки. Выбирая квадрокоптер, следует обращаться лишь в официальные магазины, чтобы получить оригинальную модель.
По форме все пропеллеры разделяют на три категории:
- Normal. Их особенность – небольшая тяга и заостренные наконечники. Благодаря этому они эксплуатируются в экономичном режиме, и время работы увеличено.
- Bullnose. Напротив, вариант с высокой тягой, скоростью полета и повышенными затратами энергии. Отличаются утяжеленной конструкцией наконечников.
- Hybrid Bullnose. Нечто среднее между двумя предыдущими вариантами и по характеристикам и по конструкции.
Направление вращения винтов квадрокоптера.
Еще одна важная характеристика, которая зависит от установленного двигателя:
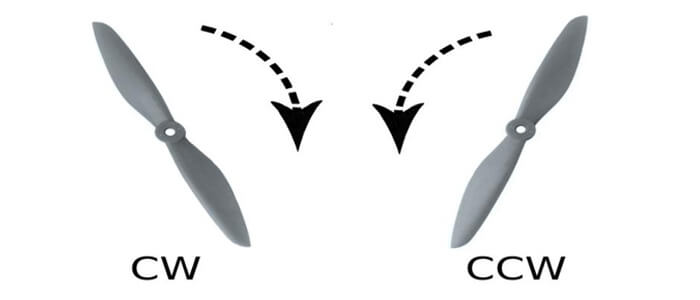
- CW. Стандартная система с работой по часовой стрелке.
- CCW. Вращение лопастей квадрокоптера против стрелки часов.

Определить, для какого типа подойдет винт, можно по поднятой кромке на нем. Эта часть детали направляется в сторону вращения.
Пластик и карбон: где качество и эффективность
Выбор лопастей для квадрокоптера по материалу не так прост. Перед владельцем дрона встает вопрос: сэкономить и обойтись базовым вариантом или купить винты хорошего качества? Разобраться поможет изучение положительных и отрицательных сторон материалов.
легкость в балансировке
красивый дизайн благодаря углеродному покрытию
Спецификация и характеристики
Для удобной работы с винтами при их подборе и установке желательно знать кодировку. Узлы обозначены данными LLPP×B. Еще есть другой вариант – L×P×B.
- L – показатель длины;
- P – шаг вращения винта;
- B – сколько установлено лопастей.
Кроме этого, могут встречаться обозначения R или C. Они указывают на направление вращения лопастей. R – на движение по часовой стрелке, а C – против.
Методы установки винта на квадрокоптер

Менять винт на дроне можно несколькими способами. Проблема в том, что обычно валом мотора является простой штырь и для установки пропеллеров потребуется что-то из нижеперечисленного:
-
Пропсейвер. Базовый вариант с максимально простой конструкцией. Его советуют ставить лишь при экспериментах с самодельными квадрокоптерами. Способ фиксации: установка пропсейвера на вал и фиксация винтов.

У некоторых квадрокоптеров с электродвигателями типа Outrunner могут быть отверстия для различных креплений.
Балансировка пропеллеров с помощью подручных средств
Производитель вряд ли рассчитает с особой точностью баланс пропеллеров. А отклонения от нормальных показателей приводят к повышению шумности, снижению качества съемки и быстрому износу электродвигателя.
Чтобы выполнить балансировку, нужны:
Вначале необходимо закрепить лопасть на оси станка и немного отклонить ее в одну из сторон. Если лопасть остается на месте, а не возвращается назад, нужно выровнять вес лезвий. Более тяжелую сторону можно обработать наждачкой или же более легкую сторону покрыть тонкими слоями лака или клея.

Шлифовка или покрытие клеевым составом выполняется только на внутренних частях винта.
Не работает винт на квадрокоптере
Ситуация, когда не работает один винт, достаточно распространенная. Возможные причины:
Для начала необходимо осмотреть крепления. Если они отвечают инструкции, то, скорее всего, причина более серьезная, и квадрокоптер лучше отнести в ремонт, выбрав услуги профессионала, а не самостоятельный способ решения проблемы.
В специализированных магазинах продаются разные варианты винтов для квадрокоптера, которые могут отличаться между собой по размеру, типу конструкции, используемым материалам и даже стороне вращения. Делая окончательный выбор, необходимо учитывать условия эксплуатации дрона.

Эта небольшая статья содержит базовую информацию о пропеллерах для квадрокоптера (иногда их называют реквизитами) и рассказывает о том, как шаг, форма и количество лопастей влияют на их производительность, тягу и эффективность.
Основные понятия
Параметры реквизитов определяются их длиной, шагом, площадью, направлением вращения, а также формой и количеством лопастей
Длина и шаг
Эти параметры являются главными. Под длиной понимают диаметр диска, образующегося при вращении пропеллера. Шаг может быть определен как расстояние, которое пропеллер может пройти в некоей твердой среде за один полный оборот (вспомните, как входит в доску самый обыкновенный шуруп). При прочих равных условиях, величина шага определяется наклоном (углом атаки) лопастей квадрокоптера.
Тяга винтомоторной группы (ВМГ) определяется объемом воздуха, который ее винты способны переместить. Понятно, что увеличение длины и/или шага пропеллеров при сохранении их скорости вращения положительно сказывается на тяге, но, к сожалению, увеличивает и сопротивление воздуха за счет растущей турбулентности. Для вращения более крупного винта или винта с большим углом наклона лопастей будет затрачено больше энергии, что приведет к снижению времени полета при прочих равных условиях.
Крупные винты с малым шагом идеально подходят для аэрофотосъемки, а небольшими пропеллерами с большим шагом оснащаются гоночные дроны.
Количество и форма лопастей
Классическим вариантом является наличие у пропеллера двух лопастей. Впрочем, на самых маленьких моделях применяют воздушные винты с тремя, четырьмя и даже пяти лопастями. Понятно, что многолопастный воздушный винт снижает уровень турбулентности за счет создания более равномерного потока. Более того, дополнительные лопасти увеличивают общую площадь винта, что благотворно отражается на подъемной силе квадрокоптера. Из этого следует, что многолопастный винт меньшего диаметра способен создавать ту же подъемную силу, что и более крупный классический пропеллер. Многолопастные пропеллеры делают летательный аппарат более отзывчивым, что очень важно при полетах в режиме Acro . Основным недостатком таких винтов является сложность изготовления и центровки, а также достаточно высокая стоимость.

Советуем обратить внимание на разницу в форме окончания реквизитов. Они бывают трех видов – Normal, Bullnose (BN), Hybrid Bullnose (HBN). Винты Normal имеют заостренные на концах лезвия, создают меньшую тягу, но способствует эффективному расходу энергии аккумулятора. Винты BN при равном диаметре имеют большую площадь и тягу. Дополнительный вес на кончиках лопастей увеличивает крутящий момент и улучшает чувствительность летательного аппарата по оси рысканья. К сожалению, эти положительные моменты сопровождаются высоким энергопотреблением и снижением времени полета. Пропеллеры HBN занимают промежуточную позицию.
Направление вращения
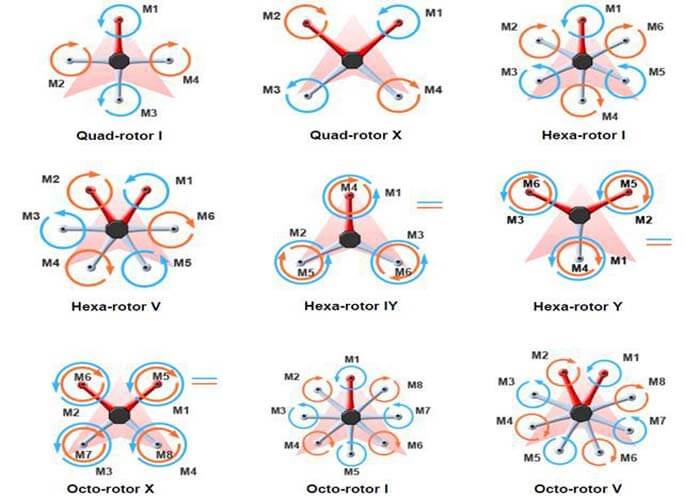
На мультикоптерах используются два типа двигателей – CW (с вращением вала по часовой стрелке) и CCW (с вращением вала против часовой стрелки). Схема установки моторов зависит от типа летательного аппарата. Несколько таких схем показаны на рисунке.
На направление вращения конкретного пропеллера указывает приподнятая кромка его лопастей.
Материал и качество
Наиболее популярны пластиковые винты. Они отличаются пластичностью, низкой ценой, широким ассортиментом и высокой степенью доступности. С одной стороны, гибкость лопастей повышает их устойчивость к повреждениям, с другой – вызывает проблемы с балансировкой.
Некоторые фирмы выпускают винты из углеродного волокна. Карбоновые винты довольно дороги, но обладают необходимой жесткостью и высокой эффективностью без значительного увеличения веса.
Промежуточное положение занимают пропеллеры, выполненные из пластика, усиленного углеродным волокном. Этот тип пропеллеров обладает высокой жесткостью и сравнительно низкой стоимостью.

Качество винтов подразумевает точность их изготовления. Высококлассные пропеллеры хорошо сбалансированы и практически не вносят дополнительную вибрацию в работу ВМГ. Лучшие реквизиты выпускаются под брендами GWS, APC и EMP.
Спецификация
Узнать о параметрах конкретного пропеллера для квадрокоптера можно по его кодировке. Производители используют два типа обозначений: LLPPxB или LxPxB. Здесь L обозначает длину, P – шаг, а B – количество лопастей. Для классических пропеллеров параметр B обычно не указывается.
Например, пропеллер 6045 (или 6×4,5) имеет две лопасти, шестидюймовую длину и шаг 4,5 дюйма. Другим примером является пятидюймовый трехлопастный пропеллер 5040×3 (или 5x4x3), имеющий шаг 4 дюйма.
Иногда в конце обозначения ставится буква R или C (может отсутствовать), определяющая направление вращения. Воздушные винты R устанавливаются на двигатели CW, а C – на моторы CCW. Изредка к обозначению добавляются аббревиатуры BN или HBN (см. выше).
Методы установки
Установить винты на квадрокоптер можно по-разному. Очень часто вал электродвигателя представляет собой простой металлический штырь, не имеющий каких-либо приспособлений для установки пропеллера. В этом случае применяют специальные переходники – пропсейверы и цанговые зажимы.
Пропсейвер (см. фото) удобно использовать для проведения экспериментов при создании самодельных моделей. Он выглядит как втулка, в боковой поверхности которой имеется два симметричных отверстия с установленными в них винтами. Приспособление устанавливается на вал, а винты затягиваются. Пропеллер также надевается на вал и фиксируется двумя нейлоновыми стяжками или резиновым кольцом.

Более надежным переходником является цанговый зажим. Он представляет собой резьбовое соединение с разрезной конусообразной втулкой. Цанга надевается на вал, далее устанавливается зажимная втулка, пропеллер и шайба. Вся конструкция фиксируется гайкой особой формы – коком.

Если ротор бесколлекторного двигателя находится снаружи (моторы класса Outrunner), то на его верхней поверхности обычно имеется несколько резьбовых отверстий для установки различных переходников и креплений.
У производителей готовых коптеров с бесколлекторными моторами очень популярен вариант с самозатягивающимися гайками от компании DJI . У таких двигателей вал заканчивается резьбой, противоположной направлению вращения ротора.
Балансировка пропеллеров
Можно с уверенностью сказать, что большинство пропеллеров, особенно дешевых, нельзя назвать сбалансированными на 100%. Такие винты не только раздражающе сильно шумят, но и вносят дополнительную вибрацию в работу ВМГ. Из-за этого, в частности, снижается качество воздушных съемок (эффект желе). Хуже того, постоянные колебания вызывают дополнительный износ двигателей, подшипников и шестерней, что повышает стоимость обслуживания летательного аппарата.
Как видим, без процедуры балансировки винтов для квадрокоптера нам не обойтись. Для этого понадобятся:
- Винт;
- Скотч или суперклей (можно заменить лаком для ногтей);
- Наждачная бумага;
- Специальный балансир пропеллеров Du-Bro Tru-Spin – один из лучших, или китайские аналоги.

Прежде всего, нужно выставить само приспособление для балансировки так, чтобы его ось была строго горизонтальной.
Лопасть проверяется на отсутствие повреждений, устанавливается на ось и слегка отклоняется в ту или иную сторону. Если он не возвращается в горизонтальное положение, нужно облегчить (подчистить наждачной бумагой) более тяжелое лезвие или наклеить кусочек липкой ленты на более легкое. Необходимо повторять процедуру до тех пор, пока лезвия не уравновесятся. Липкую ленту успешно заменяет мазок суперклея или лака.
Ось балансировочного станка переворачивается – нужно убедиться, что пропеллер сохраняет равновесие и в этом положении. Отметим, что все подчистки и наклеивания должны выполняться на внутренних (вогнутых) поверхностях лопастей.
Следующим шагом будет балансировка ступицы. Для этого пропеллер устанавливается вертикально. Если он отклоняется вправо, нужно утяжелять клеем или лаком левую часть ступицы и наоборот. Добиваемся баланса, переворачиваем пропеллер и убеждаемся, что в этом положении он также уравновешен. Процедура закончена.
Калькулятор eCalc
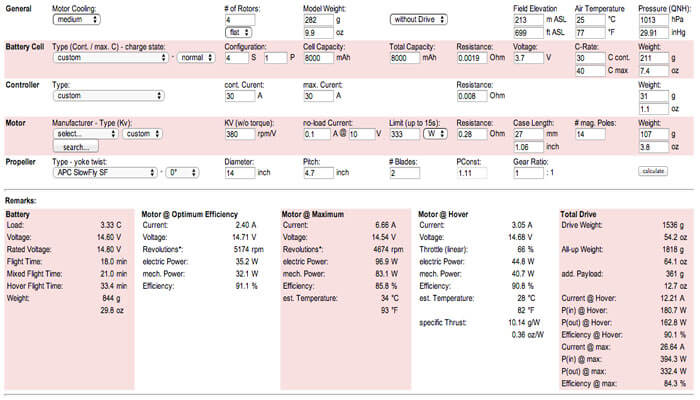
На первый взгляд, все понятно, но есть несколько нюансов, которые могут повлиять на результаты вычислений.
Прежде всего, вводится полный взлетный вес мультикоптера (с подвесом и камерой, если таковые имеются). Если будет указано Without Drive (Без привода), то вводим суммарный вес рамы, пропеллеров, платы контроллера, подвеса, камеры и оборудования для FPV полетов. Добавим процентов 10 на массу проводов и получаем искомую цифру.
Вводим количество роторов, их схему (одиночная или соосная), максимальную высоту полета и погодные условия, при которых он будет проводиться (температуру за бортом и атмосферное давление).
Из выпадающего списка выбирается нужный аккумулятор . Если необходимая батарея отсутствует, можно выбрать ближайшую по емкости и токоотдаче. Программа заполнит остальные поля самостоятельно. Задается структура и вес аккумулятора. Если предполагается параллельная установка нескольких АКБ, то в поле P вписывается их количество, а в окне Weight задается их общий вес.
Далее из выпадающего списка выбираются тип ESC или максимальный ток этих регуляторов.
Выбирается фирма-производитель двигателей. Появляется окно с его оценкой. По уровню KV подбирается конкретный образец.
Переходим к пропеллерам. Выбирается тип пропеллера, его диаметр и шаг. Рекомендуется использовать диаметр воздушного винта, максимально возможный для данной рамы. Если привод имеет зубчатую трансмиссию, то вводится ее передаточное число (отношение числа зубьев ведомой шестерни к числу зубьев ведущей шестерни).
Если нужные компоненты в выпадающих списках отсутствуют, можно перейти в строку Custom и ввести все необходимые данные в соответствующих полях калькулятора. Отметим, что параметры батареи задаются для одной ячейки.
Все поля заполнены, можно выполнять вычисления. Результат расчетов будет представлен в виде циферблатов, списков и графиков.
RashVinta
RashVinta– программа расчета диаметра воздушного винта для квадрокоптера.
Программа RashVinta позволяет производить вычисления по следующим исходным данным:
- Мощность двигателя и диаметр винта;
- Мощность двигателя и частота вращения винта;
- Диаметр винта и его шаг.
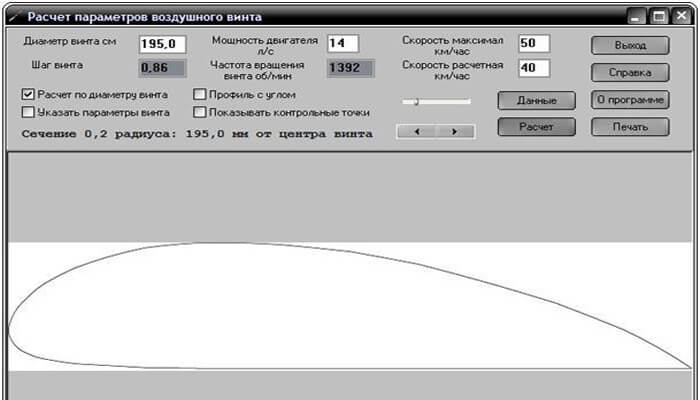
Полученный профиль можно распечатать в масштабе 1:1.
Заключение
Как видим, подбор и корректировка пропеллеров для квадрокоптера является достаточно непростой задачей. Надеемся, что наш текст поможет любителям беспилотной авиации правильно выбрать, сбалансировать и установить пропеллеры на летательный аппарат собственной конструкции, а также устранить огрехи в работе винтомоторной группы серийных моделей .
Будем благодарны вам, если поделитесь с друзьями:
Сразу оговорюсь, что в любом проектировании бывает достаточно много НО. Всё, что я скажу далее, это стартовые знания. Не бойся включать голову и задавать вопросы. Нет такой информации, которую нельзя найти в гугле, или спросить на форуме. Главное- умение ей пользоваться. Поехали!
Основные понятия

Основные параметры
Количество

Количество лопастей винта влияет на подъёмную силу, стабильность и отзывчивость коптера (в идеальном мире). Чем больше лопостей, тем эти параметры лучше. На самом деле, многолопастные пропеллеры (2+) ставятся только на мелкие дроны. Это происходит из за дороговизны изготовления и сложности балансировки. В большом размере отбалансировать 4 лопасти очень дорого.
Чем их больше, тем стабильнее БПЛА. Малое количество негативно сказывается на управляемости.
Виды лопастей
- Normal (N) – Имеют заострённые на концах лезвия. Это уменьшает тягу, но и снижает расход энергии аккумулятора
- Bullnose (BN) – Бычий нос (Закруглённые). При равном с нормальными диаметре, имеют большую тягу и площадь. За счёт тяжести ведут себя более стабильно, и увеличивают отзывчивость дрона по рысканью. Сильно повышают расход энергии акб.
- Hybrid Bullnose (HBN) – промежуточный вариант. Имеют как и преимущества, так и недостатки предыдущих.
Направление вращения

На направление вращения самого пропеллера указывает поднятая кромка. Она смотрит в сторону вращения.
Материал
Пластик – наиболее популярный, но не самый удачный вариант. Пластиковые пропеллеры обладают низкой ценой и очень широки ассортиментом. Обладают разной, но в основном высокой гибкостью и мягкостью. Якобы это увеличивает их устойчивость к механическим повреждениям. На самом деле, любой, даже небольшой дефект лопасти, скорее всего, будет фатален. Там уже не важно, расколется она, или просто помнётся. Всё равно ты её меняешь.

Углеродное волокно – Очень дорого, но очень круто. Великолепная жёсткость, лёгкость. Легко сбалансировать. Это значит, что брака будет меньше. Не теряет форму. Да и наличие чёрных лопастей всегда радует глаз. К ним рекомендуется докупить защиту лопастей для квадрокоптера, ибо их очень легко расколоть.
Композит – внутри пластик, снаружи покрытие из углеродного волокна. Дешевизна пластика, жёсткость и износостойкость (почти) как у карбоновых пропеллеров. Также не очень высокая цена.
От веса зависит отзывчивость дрона по оси рысканья. Однако, с этим надо быть аккуратным, ибо также увеличивается нагрузка на мотор квадрокоптера.
Эластичность
Эластичность пропеллера улучшает устойчивость оного к перегрузкам и механическому воздействию (не путать с мягкостью).
Качество

Как правило, чем дороже, тем качественнее. Тут может быть много параметров. Основной, это балансировка. Качественный пропеллер балансировать не придётся. Так же важным моментом является качество материала.
Пластик может быть упругим и эластичным, а может быть мягким и НЕ эластичным. С этим нужно быть внимательным. Не смотря на кажущуюся простоту, от качества лопастей напрямую зависят лётные качества коптера.
Спецификация
Есть два типа обозначений.
- L- длинна
- P- шаг
- B- количество лопастей (для двух лопастей может не указываться)
Например, 5045×3 – длина 5 дюймов, шаг 4.5 дюйма, 3 лопасти.
Иногда приходится гадать. Тот же пропеллер может обозначаться 0545×3.
Например, 5×45х3 – длина 5 дюймов, шаг 4.5 дюйма, 3 лопасти.
Иногда в конце присутствует буква R или C. Она определяет направление вращения пропеллера.
- R – по часовой стрелке
- C – против часовой стрелки
- N – нормальная (заострённая)
- BN – закруглённая
- HBN – промежуточная
Методы крепления и крепежи

Пропсейвер – Хороший вариант для проведения экспериментов, когда надо часто снимать и надевать пропеллер. Выглядит как втулка, которая притягивается к валу двигателя двумя винтами. Сам пропеллер надевается сверху, и притягивается резинками к выступающим винтам. Далеко не полетит, но можно побаловаться.
Цанговое крепление – рабочий вариант. На вал насаживается цанга (та, что с прорезями), потом зажимная втулка, пропеллер и шайба. Крепление надёжное и идеальное для полётов.
Outranner – Это не крепление, это разновидность бесколлекторного мотора, в котором ротор (вращающаяся часть) находится снаружи. На их верхней поверхности обычно находится несколько резьбовых отверстий, в которые крепится переходник (коих несметное количество).
Балансировка

Для этого тебе понадобится:
- Пропеллер
- Скотч\супер клей (на свой страх и риск)
- Мелкозернистая наждачная бумага
- Специальный инструмент — балансировщик пропеллеров
- Уровень
- Балансировщик устанавливаешь строго горизонтально.
- Устанавливаешь пропеллер на ось, в горизонтальное положение. Отпускаешь. Одна из лопастей падает вниз.
- Берёшь наждачку, и с внутренней стороны поднявшейся лопасти (с вогнутой) снимаешь немного материала. Не переусердствуй.
- Возвращаешь лопасти в горизонтальное положение. Если одна из них падает – повторяешь предыдущий пункт. Если нет- идём дальше
- Так как балансировщик тоже не лучшего качества- переворачиваешь ось и смотришь по новой. Нужно поймать момент, когда вне зависимости от направления оси, пропеллер будет сбалансирован.
- Молодец.
- Но не совсем. Теперь ступица. Устанавливаешь пропеллер вертикально. Если пропеллер наклоняется вправо- делаешь мазок лаком на левой стороне.
- Добиваешься баланса
- Меняешь направление горизонтальной оси пропеллера. Если всё по-прежнему в порядке- ты отбалансировал пропеллер. Надеюсь у тебя не октокоптер.
- Молодец!
Калькулятор Ecalc
Крайне удобный калькулятор, которые находится на официальном сайте Ecalc. В нём ты сможешь задать те запчасти, которые будешь использовать для своего проекта, а он выдаст тебе (очень) примерную модель поведения коптера.

Давай рассмотрим его поближе, так как он тебе точно пригодится.
Основное
Аккумулятор
Регулятор
- Из списка выбираешь свой регулятор скорости
- В навесном оборудовании пишешь суммарное потребление и вес всей той фигни, что ты хочешь повесить на свой дрон. Камера, диоды, сервоприводы, мелкокалиберные орудия. Если ты уже указал их вес в основном весе модели, то поле вес оставляешь с нулём
Мотор
Пропеллер
- Выбираешь тип пропеллера из списка. Угол кручения (угол атаки), диаметр винта и его шаг ты узнаешь из спецификации
- Передаточное число используешь, если твой пропеллер присоединён к мотору через редуктор
Если в списках нет нужной позиции, то можно воспользоваться строкой Custom, и ввести всё самостоятельно.
RashVinta
Программа для расчёта параметров пропеллера для летательного аппарата.

Она может работать с тремя наборами исходных данных.
- Мощность двигателя + диаметр винта, который вам нужен
- Мощность двигателя + частота вращения
- Диаметр винта + шаг
В первом варианте
В результате ты увидишь необходимый шаг винта и частоту вращения.
Во втором варианте
- Убери все галочки
- Введи мощность двигателя
- Введи частоту вращения винта (двигателя, если нет редуктора)
- Введи максимальную и среднюю скорости
На выходе ты получаешь диаметр винта в сантиметрах и шаг винта.
Третий вариант
Как ты можешь заметить, подбор и корректировка пропеллеров, это важное и не самое простое занятие. Однако, настоятельно рекомендую уделить этому время. Даже в такой, на первый взгляд, неуклюжей корове, как квадрокоптер, есть место аэродинамике. К тому же это может сэкономить тебе очень много денег на моторах.
Конечно, всё вышесказанное достаточно ситуативно. К примеру, если ты собираешь маленький дрон, или просто хочешь попробовать, то пропеллеры можно использовать и самые дешёвые, и не отбалансированные.
Это вряд ли помешает твоему дрону взлететь, да и ты сразу поймёшь, что не так, и на что нужно впредь обращать больше внимания.
Так же крайне не рекомендую начинать с соосной компоновки, если ты не знаком с миром беспилотной авиации. Там есть куча нюансов, которые базируются на более глубоком понимании темы. Идеальным вариантом для начала будет четырёх лучевая, квадратная компоновка.
Ну и нужно понимать, что если ты не крутой инженер, с богатым набором закрытых САПР программ, то всё, что ты можешь рассчитать – мало тебе поможет.
Все эти вычислительные решения дают крайне ориентировочный результат. Так что я рекомендую тебе побольше экспериментировать, хотя помощью софта пренебрегать тоже не стоит. Пробуй, учи матчасть, когда-нибудь получится очень круто!
Уф… Я старался, клавиатуру до стола стёр, выпил ведро кофе. За это ты можешь наградить меня, и поделиться этой статьёй, при помощи кнопок внизу. А если хочешь почаще узнавать что-то новое и полезное, то подписывайся на нас в социальных сетях. Удачи, пилот!

Пропеллеры нужны для того, чтобы создать подъемную силу с помощью двигателя, они непосредственно влияют на то, как себя будет вести квадрокоптер в воздухе. Чтобы максимально эффективно использовать квадрокоптер, нужно знать некоторые моменты о пропеллерах.
При выборе пропеллеров, нужно учитывать 4 основных моментов:
- Размер;
- Шаг;
- Конфигурация лопастей;
- Материал (долговечность).
Все эти моменты взаимосвязаны. Для аналогии можно использовать автомобиль и его коробку передач.
Маркировка пропеллеров состоит из 3 чисел, такого вида: 5045 и DP5х4.5х3V. 5045 — это сокращенная цифра общей маркировки. Общая маркировка DP5х4.5х3V: первая цифра означает размер, в нашем случае это 5 дюймов. 4.5 это шаг или угол наклона лопастей, который обозначает расстояние, которое пропеллер пройдет за 1 полный оборот по своей оси. Третья цифра (3) — это количество лопастей на пропеллере. На фото ниже пропеллер с такими же техническими характеристиками:

Маркировка пропеллеров: размер (в дюймах) X шаг (в дюймах) X количество лопастей.
Есть еще 3 критерия для подбора пропеллеров:
- для какого стиля полетов
- для какой рамы
- для каких двигателей
Для какого стиля полетов
Здесь всего 2 типа — это гонки и съемка. Для съёмочного дрона нужны большие и широкие пропеллеры, им не нужна большая скорость вращения и резкий разгон.
Для гонок нужны небольшие и тонкие пропеллеры, чтобы была возможность быстрого ускорения.
Для какой рамы
Обычно, в названии пропеллеров пишут для какой рамы разработаны эти пропеллеры, например, для 250 рамы, это означает, что они подходят для рамы размером 250 миллиметров. Можно использовать пропеллеры размером немного большим или меньшим, но технически рамы проектируются так, чтобы край лопасти был всего в нескольких миллиметрах от фюзеляжа.
Для каких двигателей
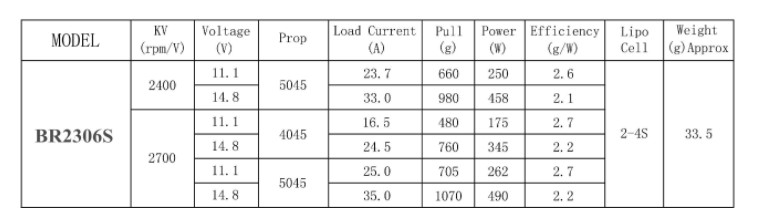
Для слабого двигателя не подходят огромные и широкие пропеллеры, он их не сможет быстро разгонять и поддерживать вращение, в итоге будет перегреваться под большой нагрузкой и сгорит. Например, если у вас двигатели 2205 2300KV, то вам подойдут пропеллеры 5045. Такие двигатели ставят на мини квадрокоптеры с рамами 210-250 мм. Каждый производитель двигателей для дронов выполняет много разных тестов и составляет специальную таблицу, где указывает какие пропеллеры подойдут именно для этих двигателей на основе используемых аккумуляторов и регуляторов оборотов.
Так выглядит таблица с маркировкой пропеллеров для двигателей Racerstar 2306 BR2306S :
Какие бывают размеры пропеллеров
Пропеллеры малого размера быстрее реагируют на изменение скорости вращения двигателей. Они проталкивают через себя меньше воздуха, соответственно тратят меньше энергии при изменении скорости вращения. Небольшие пропеллеры ставят на гоночные квадрокоптеры, чтобы очень быстро менять скорость вращения двигателей, совершать быстрые падения, которые не получатся на больших пропеллерах из-за планирования и для быстрого изменения направления полета.
Пропеллеры должны соответствовать двигателям, потому что, если мы поставим 3-дюймовые пропеллеры на двигатель, который рассчитан на 5 дюймовые пропеллеры, то это приведет к чрезвычайно высоким оборотам и большому потреблению энергии из-за маленькой нагрузки от пропеллеров, при этом тяга будет небольшая. Это не только неэффективно, но и очень быстро выведет двигатель из строя (попутно прихватив с собой и регуляторы оборотов), так как он не рассчитан работать на таких оборотах.

На фото 7-дюймовый пропеллер
Наиболее популярным пропеллером считается 5-дюймовы пропеллер, для которого подходят двигатели в диапазоне размеров 2204-2307.
Конфигурация пропеллеров
Пропеллеры бывают:
Конфигурация пропеллера это то, сколько лопастей у пропеллера. Самым эффективным будет однолопастной пропеллер, но его физически нельзя использовать из-за дисбаланса.
Увеличение числа лопастей компенсирует размер пропеллера, особенно в микросборках, ведь если на маленький дрон на раме 100 мм поставить 2-лопастные пропеллеры, он вряд ли будет адекватно летать и это приведет к большим оборотам двигателей и их перегреву. Именно поэтому в микросборках всегда 4-лопастные пропеллеры, а в дронах чуть больше — 3-лопастные.
Из-за сложной физики и аэродинамики увеличение количества лопастей не так эффективно, как увеличение размера. Винт с удвоенным количеством лопастей не будет работать так же хорошо, как винт с удвоенным размером, но он обеспечивает большую тягу за счет большей мощности.
Увеличение количества лопастей приведет к увеличению тяги и сцепления в воздухе за счет отзывчивости и увеличения потребляемой энергии. Если проектируется дрон, на котором вы будете совершать много постоянных и резких изменений направления в полете, то нужны пропеллеры с увеличенным количеством лопастей.
В наиболее распространенной категории 5 дюймовых пропеллеров принято считать, что пропеллеры с тремя лопастями обеспечивают наилучший баланс эффективности, тяги и сцепления.
Есть один момент, который многие упускают из вида — это долговечность. Во время полетов, особенно если пилот начинающий, будет очень много аварий и падений, поэтому пропеллеры станут расходным материалом. Но если использовать 2-лопастные пропеллеры, то ломаться они будут меньше. Дело в том, что когда дрон c 3-лопастными пропеллерами падает, 2 из 3 лопастей в любой случае ткнутся в землю, в то время как 2-лопастной скорее всего провернется и ничего сам себе не сломает.
Шаг пропеллера
Шаг — это угол наклона каждой лопасти пропеллера.
Шаг это то расстояние, которое пройдет пропеллер вверх за 1 оборот в идеальных условиях.
Высокий шаг приводит к большей тяге и максимальной конечной скорости, но маленькому крутящему моменту на низких скоростях. Для сравнения представьте пятую скорость в автомобиле, здесь тоже самое, тронуться на 5 передаче вы не сможете, а вот развить еще большею скорость уже будучи на ней — да.
Пропеллер с большим шагом будет медленно реагировать на газ, потреблять больше энергии и будет максимально эффективным на больших оборотах.
Высокий шаг применяется в пропеллерах для съемочных квадрокоптеров.
Низкий шаг обеспечивает большой крутящий момент на малых оборотах, но у него небольшая тяга и максимальная конечная скорость. В автомобиле это первая и вторая передачи. Двигатель с таким пропеллером будет быстро реагировать на изменение уровня газа, дрон будет очень отзывчивым.
Низкий шаг применяется в пропеллерах для гоночных дронов (мини и микро).
Идеальными пропеллерами для гоночных мини квадрокоптеров считаются пропеллеры с шагом от 4 до 4,5 дюймов, они сочетают в себе хорошую чувствительность, крутящий момент, максимальную скорость и тягу.

Пример шага на пропеллерах
Материал пропеллеров
Чаще всего в магазинах вы покупаете пропеллеры из поликарбоната, он пластичный и прочный. Еще есть пропеллеры из АБС-пластика, это тоже очень прочный пластик, но более хрупкий. Отличие от поликарбонатных пропеллеров в том, что при ударе лопасть из АБС-пластика скорее всего сломается, а из поликарбоната просто погнется, причем эту лопасть можно выпрямить, но это чревато возникновением вибрации из-за нарушенной балансировки.
Есть еще пропеллеры из пластика, который армирован стекловолокном, это очень жесткие пропеллеры, но в тоже время при сильном ударе ломаются.
Выбор материала пропеллеров зависит и от времени года. Пластмассы для пропеллеров термопластичны, то есть, их жесткость и пластичность зависит от температуры. Если вы летаете зимой, то лучше ставить пропеллеры из АБС-пластика, так как поликарбонат на холоде дубеет и становится хрупким. Если вы летаете в жару, то лучше использовать пропеллеры армированные стекловолокном для хорошей жесткости, так как АБС и поликарбонат будут становиться мягкими под действием жары от солнца и дрона потеряет тягу.
Универсальными пропеллерами считаются пропеллеры из поликарбоната.
Как отличить поликарбонатный пропеллер от АБС-пластика? Первый относительно прозрачный, второй совсем нет:


Схема установки пропеллеров
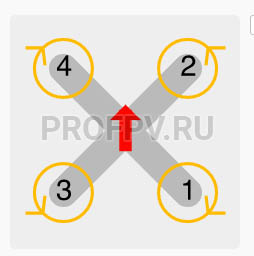
Прежде, чем устанавливать пропеллеры на квадрокоптер, вам нужно узнать, в правильную ли сторону будут крутиться моторы. Большинство квадрокоптеров летает на конфигурации Multiwii, выглядит она вот так:
Красная стрелка — это направление, куда будет лететь квадрокоптер, то есть вперед. Желтые стрелки — направление вращения пропеллеров. Можно легко запомнить в какую сторону какой двигатель крутится: два передних мотора крутятся в сторону камеры, а два задних мотора крутятся от камеры (передние внутрь, задние наружу). Есть еще реверсивная схема, это когда передние вращаются наружу, а задние внутрь. Такая схема позволяет избавиться от летящей грязи в камеру из-за вращения пропеллеров внутрь.
Рекомендации по выбору пропеллеров и заключение
Рекомендации на основе классических пропеллеров 5045.
Для поиска других пропеллеров опирайтесь на таблицы ваших двигателей, там будет указан размер и шаг (4 цифры), а если такой не нашлось у продавца, найдите другого или лучше выберите другие двигатели, так как отсутствие таких данных говорит о низком качестве.
Наиболее зарекомендованные бренды это LDARC (они же KINGKONG), HQProp и Dalprop. Не покупайте самые дешевые пропеллеры, так как качество и балансировка часто низкого качества, только если для тестов, чтобы убедиться в качестве дорогих.
This commit does not belong to any branch on this repository, and may belong to a fork outside of the repository.
- Open with Desktop
- View raw
- Copy raw contents Copy raw contents
Copy raw contents
Copy raw contents


Многовинтовые вертолёты разрабатывались ещё в первые годы вертолётостроения. Один из первых квадрокоптеров (англ. quadcopter, четырёхроторный вертолет), который реально оторвался от земли и мог держаться в воздухе, был создан Георгием Ботезатом и испытан в 1922 году. Недостатком этих аппаратов была сложная трансмиссия, передававшая вращение одного мотора на несколько винтов. Изобретение хвостового винта и автомата перекоса положило конец этим попыткам. Новые разработки начались в 1950-е годы, но дальше прототипов дело не продвинулось.

Беспилотный летательный аппарат (БПЛА) - летательный аппарат, выполняющий полет без пилота (экипажа) на борту и управляемый в полете автоматически, оператором с пункта управления или сочетанием указанных способов. Основные классы таких аппаратов – это БПЛА самолетного и вертолетного типов.
БПЛА самолетного типа
Этот тип аппаратов известен также как БПЛА с жестким крылом. Подъемная сила данных аппаратов создается аэродинамическим способом за счет напора воздуха, набегающего на неподвижное крыло. Аппараты такого типа, как правило, отличаются большой длительностью полета, большой максимальной высотой полета и высокой скоростью. Существует большое разнообразие подтипов БПЛА самолетного типа, различающихся по форме крыла и фюзеляжа. Практически все схемы компоновки самолета и типы фюзеляжей, которые встречаются в пилотируемой авиации, применимы и в беспилотной.
Применение БПЛА самолетного типа
БПЛА самолетного типа способны охватывать гораздо большие площади, чем обычные коптеры, благодаря возможности длительно находиться в воздухе и развивать большие скорости, но их цена существенно превышает цену типовых коптеров. Главный недостаток таких устройств (кроме цены) - качество изображения может пострадать из-за скорости, такие летательные аппараты зачастую не могут зафиксировать трехмерные/топографические детали съемки. Сферы использования:
- Аэрофотосъемка местности (при необходимости отснять рельеф поверхности земли на протяженном расстоянии);
- Военная сфера (тяжёлые БПЛА большой продолжительности полёта – взлётная масса более 1500 кг, дальность действия около 1500 км);
- Сельское хозяйство (распространение удобрений, мониторинг полей);
- Охрана и мониторинг местности.
Беспилотный летательный аппарат (БПЛА) - летательный аппарат, выполняющий полет без пилота (экипажа) на борту и управляемый в полете автоматически, оператором с пункта управления или сочетанием указанных способов. Имеет широкое применение в различных сферах:
- Телекоммуникационная сфера (использование двусторонней видео/аудио связи);
- Транспортная сфера (транспортировка грузов);
- Спасательные работы (исследование труднодоступных зон при стихийных бедствиях, терактах, поиск находящихся под завалами людей, транспортировка медикаментов, оказание первой помощи при несчастных случаях);
- Рекламные кампании (применение робота для привлечения внимания на крупных выставках и т.п.);
- Сфера СМИ (аэросъемка различных событий);
- Видео/фото-съёмка (съёмка фильмов или рекламных роликов с высоты птичьего полёта);
- Продовольственная сфера (доставка продуктов питания).
Виды и конфигурация


Оси коптера: углы тангажа, крена и рыскания (pitch, roll, yaw) — углы, которыми принято определять и задавать ориентацию мультикоптера в пространстве.



LFW — left front clockwise rotation (левый передний, вращение по часовой стрелке)
RFC — right front counter clockwise rotation (правый передний, вращение против часовой стрелке)
LBC — left back counter clockwise rotation (левый задний, вращение против часовой стрелке)
RBW — right back clockwise rotation (правый задний, вращение по часовой стрелке)

Как правило, когда речь заходит об управлении моделью катера или самолёта, оператор имеет абсолютный, точный контроль над работой мотора. Нажатие на джойстик пульта приводит к пропорциональному увеличению скорости вращения винтов (в об./мин). Отличие многовинтовых летательных аппаратов (вне зависимости от того, достоинство это или недостаток) в том, что ни один человек не в состоянии одновременно контролировать скорость вращения трёх и более моторов достаточно точно, чтобы сохранять баланс аппарата в воздухе. Именно здесь в игру вступают Полетные контроллеры.

Полетный контроллер - самая важная часть. Стабильность полета и управляемость на девяносто процентов зависит от способностей полетного контроллера. Задача полетного контроллера — переводить команды от пульта управления в сигналы задающие обороты двигателя. Также в нем установлены инерциальные измерительные датчики, позволяющие следить за текущим положением платформы и выполнять автоматические регулировки.

ESC — это регуляторы оборотов электродвигателей. Дело в том, что в мультикоптерах используют специальные бесколлекторные электродвигатели, которые способны работать на очень больших оборотах. Для управления этими двигателями необходимо формировать трехфазное напряжение и относительно большие токи, чем и занимаются регуляторы оборотов. Для каждого двигателя необходим свой регулятор оборотов. Все регулятора оборотов подключаются к полетному контроллеру. Питаются регуляторы непосредственно от аккумулятора. Каждый двигатель подключен к своему регулятору оборотов тремя проводами. Последовательность подключения проводов определяет направление вращения двигателя.

Электродвигатель. В конструкциях коптеров используются бесколлекторные электродвигатели. Они обладают выдающимися характеристиками и живучестью в связи с отсутствием трущихся узлов (щеток) посредством которых передается ток. В отличие от обычного электродвигателя, у которого имеется подвижная часть - ротор и неподвижная - статор, у бесколлекторного двигателя подвижной частью является как раз статор с постоянными магнитами, а неподвижной частью - ротор с обмотками трех фаз. Для того, чтобы заставить вращаться такую систему, необходимо осуществлять в определенном порядке смену направления магнитного поля в обмотках ротора - тогда постоянные магниты статора будут взаимодействовать с магнитными полями ротора и подвижный статор придет в движение. Это движение основано на свойстве магнитов с одноименными полюсами полюсами отталкиваться, а с противоположными - притягиваться.

Аппаратура радиоуправления. Представляет собой передатчик с пультом и приемник. Отличаются друг от друга количеством каналов и частотой. Большинство передатчиков имеют частоту 2,4ГГц, так же на рынке представлен ряд других частот.
Пропеллер - лопасть, приводимая во вращение двигателем и предназначенная для преобразования мощности (крутящего момента) двигателя в тягу. Лопасти винта, вращаясь, захватывают воздух и отбрасывают его в направлении, противоположном движению. Перед винтом создаётся зона пониженного давления, за винтом - повышенного. Таким образом создается подъемная сила. Воздушный винт имеет следующие характеристики:
Шаг винта - одна из основных технических характеристик воздушного или гребного винта, зависящая от угла установки его лопастей относительно плоскости вращения при их круговом движении в газовой или жидкостной среде — это расстояние, пройденное поступательно винтом, ввинчивающимся в твёрдую среду, за один полный оборот (360°);
Питает регуляторы и полетный контроллер. В строительстве коптеров применяют специализированные литий-полимерные аккумуляторы. Основные характеристики аккумулятора:
Читайте также: