
Для чего нужен ультразвуковой датчик кратко
Обновлено: 05.07.2024
Ультразвуковой дальномер определяет расстояние до объектов точно так же, как это делают дельфины или летучие мыши. Он генерирует звуковые импульсы на частоте 40 кГц и слушает эхо. По времени распространения звуковой волны туда и обратно можно однозначно определить расстояние до объекта.
В отличие от инфракрасных дальномеров, на показания ультразвукового дальномера не влияют засветки от солнца или цвет объекта. Но могут возникнуть трудности с определением расстояния до пушистых или очень тонких предметов. Поэтому высокотехнологичную мышеловку выполнить на нём будет затруднительно.
При отражении звука от препятствия мы слышим эхо. Летучая мышь использует отражение ультразвуковых волн для полётов в темноте и для охоты на насекомых. По такому же принципу работает эхолот, с помощью которого измеряется глубина воды под днищем корабля или поиск рыбы.
Принцип передачи и приема ультразвуковой энергии лежит в основе многих очень популярных ультразвуковых датчиков и детекторов скорости. Ультразвуковые волны являются механическими акустическими волнами, частота которых лежит за пределами слышимости человеческого уха — более 20 кГц. Однако сигналы этих частот воспринимаются некоторыми животными: собаками, кошками, грызунами и насекомыми. А некоторые виды млекопитающих, таких как летучие мыши и дельфины, общаются друг с другом ультразвуковыми сигналами.
УЛЬТРАЗВУКОВОЙ ДАТЧИК Lego Mindstorm EV 3. ЗРИ В КОРЕНЬ

Технические спецификации и особенности продукта:
Рис. 1 Ультразвуковой датчик Lego Mindstorm EV 3 (стоимость вместе с внутренним микроконтроллером и микросхемами усиления сигнала $50, при себестоимости $5)
Рис. 2 Схема ультразвукового датчика Lego Mindstorm EV 3 (ultrasonic sensor hardware schematics) построена на микроконтроллере STM8S103F3

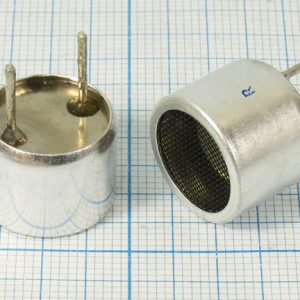
Рис. 3 Ультразвуковые излучатель AW8T40 и приемник AW8R40 ультразвукового датчика Lego Mindstorm EV 3
Ультразвуковой датчик HC-SR04
Ультразвуковой датчик HC-SR04 — Ultrasonic Ranging Module HC — SR04 — Ultrasonic Sensor Distance Measuring Module — Sonar
Ультразвуковой дальномер HC SR04 самый известный датчик для применения в Arduino, Raspberry Pi, ESP8266 и ESP32 модулях. Позволяет измерять расстояние до объекта в диапазоне от 2 до 400 (180) см. Например, если вы хотите собрать робота, который объезжает преграды, то данный дальномер прекрасно подойдет для ваших задач. Датчик имеет небольшие габариты и простой интерфейс.
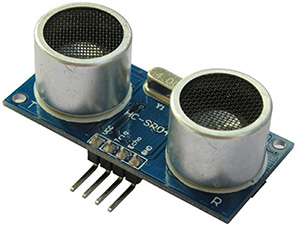
Рис. 4 Внешний вид ультразвукового датчика (сонара, ультразвукового сенсора, ультразвукового модуля) HC-SR04
Названия выводов и ультразвуковых излучателей модуля
- Vcc — положительный контакт питания.
- Trig — цифровой вход. Для запуска измерения необходимо подать на этот вход импульс (логическую единицу) длительностью 10 мкс. Следующий импульс рекомендуется подавать не ранее чем через 50 мс. что связано со временем обработки первого импульса.
- Echo — цифровой выход. После обработки отраженного сигнала, на этот выход будет подан импульс (логическая единица), длительностью пропорциональной расстоянию до объекта.
- GND — отрицательный контакт питания (земля).
- Левый ультразвуковой излучатель (маркирован буквой Т — transmiter) это передатчик ультразвукового сигнала, правый ультразвуковой излучатель (маркирован буквой R — resiver) это приемник отраженного от объекта ультразвукового сигнала (эха).
Характеристики
- Напряжение питания: 5 В. Модель HC-SR04 + работает в диапазоне от 3,3В-5В (помечено как HC-SR04 + на задней стороне платы модуля)
- Потребление в режиме тишины: 2 мА
- Потребление при работе: 15 мА
- Максимальная частота опроса датчика: 20 Гц (Период опроса 50 мс)
- Частота ультразвука: 40 кГц
- Дальность обзора: 2 см – 4 м (1,8 м)
- Разрешение (градация выходного сигнала): 0,3 см
- Эффективный угол наблюдения: 15°
- Рабочий угол наблюдения: 30°
- вес — 8,28 грамм
- Размеры: 45*20*15 мм. ДхШхГ (Ш — без учета контактов подключения)
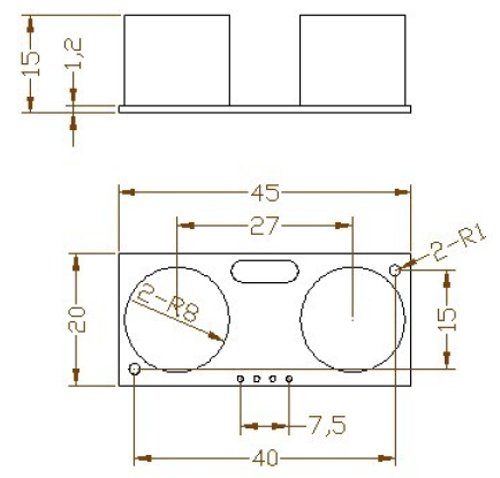
Рис. 5 Размеры ультразвукового датчика HC-SR04

- Внимание:
! Модуль не рекомендуется подключать непосредственно к подключенной к электропитанию плате микроконтроллера, необходимо отключить электропитание в момент подключения модуля , первым должен быть подключен вывод GND модуля, в противном случае,это может повлиять на нормальную работу модуля. - ! При испытании модуля на дальность и точность измерения, размер площади объекта сканирования должен не менее 0,5 квадратных метров и его поверхность должна быть как можно тверже и ровнее, в противном случае, это будет влиять на результаты измерений.
Рис. 6 Диаграмма направленности ультразвукового датчика HC-SR04. Взята из документации на этот датчик
Описание работы:
Тест угла обзора датчика, взят из описания с сайта:
Ультразвуковой датчик расстояния определяет расстояние до объекта, измеряя время отображения звуковой волны от объекта. Частота звуковой волны находится в пределах частоты ультразвука, что обеспечивает концентрированное направление звуковой волны, так как звук с высокой частотой рассеивается в окружающей среде меньше. Типичный ультразвуковой датчик расстояния состоит из двух мембран, одна из которых генерирует звук, а другая регистрирует отображенное эхо. Образно говоря, мы имеем дело со звуковой колонкой и микрофоном. Звуковой генератор создает маленький, с некоторым периодом ультразвуковой импульс и запускает таймер. Рисунок 3 – Ультразвуковой датчик расстояния HC-SR04 Вторая мембрана регистрирует прибытие отображенного импульса и останавливает таймер. От времени таймера по скорости звука возможно вычислить пройденное расстояние звуковой волны. Расстояние объекта приблизительно половина пройденного пути звуковой волны. Рисунок 4 –Принцип работы ультразвукового датчик расстояния Ограничения, связанные с применением ультразвукового датчик расстояния : 1. Частичные отражения, или как их называют паразитный эхо-сигнал, могут исказить результаты измерений (причиной могут стать криволинейные или наклонные по отношению к направлению излучения сигнала поверхности). 2. Измерения объектов из звукопоглощающих, изоляционных материалов или имеющих тканевую (шерстяную) поверхность могут привести к неправильным измерениям вследствие поглощения (ослабления) сигнала. 3. Чем меньше объект, тем меньшую отражающую поверхность он имеет. Это приводит к более слабому отраженному сигналу. 4. При высокой влажности (дождь, снег) сигнал также может частично отражаться от капель (снежинок), что приводит к паразитному эхо- сигналу.
Принцип работы датчика следующий: один из пьезоэлементов излучает ультразвуковую волну при подачи импульса длительностью 15 микросекунд, а другой пьезоэлемент принимает эту же отражённую волну от препятствия. Затем замеряется время задержки от передачи до приёма волны, далее вычисляется расстояние и передаётся сигнал на ногу Echo датчика, длительностью пропорциональной расстоянию до препятствия. Нам остаётся только подавать импульс на датчик, принять его и вычислить расстояние. Сегодня мы научимся работать с HC-SR04 на BASCOM-AVR.
Поставим перед собой задачу: собрать устройство, которое должно замерять расстояние до какого либо объекта с помощью датчика HC-SR04 и передавать данные через UART на ПК.
Для этой цели можно использовать практически любой AVR микроконтроллер, так как алгоритм очень простой. Я взял Atmega8, в итоге получилась следующая принципиальная схема устройства:

Описание принципа работы ультразвукового дальномера HC—SR04 можно разделить на следующие шаги:
Следующий импульс может быть излучён, только после исчезновения эха от предыдущего. Это время называется периодом цикла (cycle period). Рекомендованный период между импульсами должен быть не менее 50 мс.
Если на сигнальный пин (Trig) подаётся импульс длительностью 10 мкс, то ультразвуковой модуль будет излучать восемь пачек ультразвукового сигнала с частотой 40кГц и обнаруживать их эхо. Измеренное расстояние до объекта пропорционально ширине эха (Echo) и может быть рассчитано по формуле, приведённой на графике выше.
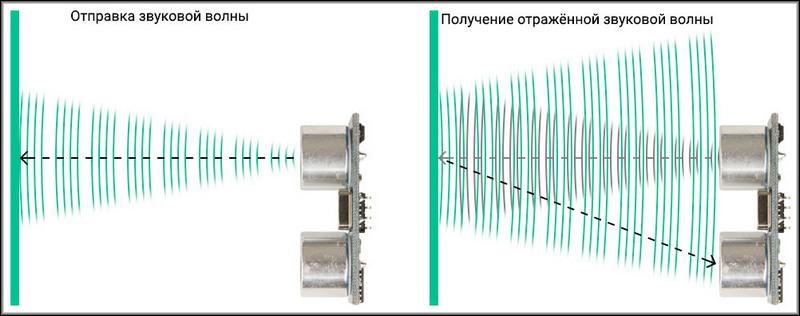
Шаг 1: На вход Trig подаётся импульс длительностью 10 микроСекунд. Для дальномера это команда начать измерение расстояния перед ним.
Шаг 2: Устройство генерирует 8 ультразвуковых импульсов с частотой 40 кГц через выходной сенсор T.
Шаг 3: Звуковая волна отражается от препятствия и попадает на принимающий сенсор R.
Шаг 4: На выходе Echo формируется импульс, длительность которого прямо пропорциональна измеренному расстоянию.
Шаг 5: На стороне управляющего контроллера переводим длительность импульса Echo в расстояние по формуле: ширина импульса(мкс) / 58 = дистанция (см).
Ниже на рисунке приведены временные диаграммы, наглядно поясняющие перечисленные шаги.
На сигнал Trig нужно подавать короткие импульсы длительностью 10мкс. Этот импульс запускает эхо-локатор. Он уже сам генерирует пачку ультразвуковых импульсов (40кГц) для излучателя и сам ловит отраженное эхо. По времени распространения звука туда и назад датчик определяет расстояние. Нам же сам датчик на контакт Echo выдает импульс с длительностью пропорциональной расстоянию. Длительность сигнала Echo от 150мкс до 25мс. Если ответа нет, то длительность Echo около 40мс. Расстояние до объекта можно вычислить разделив длительность в микросекундах эха на 58. Получаются расстояние в сантиметрах. Максимальное расстояние, которое можно мерить судя по документации — 5 метров.
Рекомендуемый период опроса датчика 50-10мс. Диаграмма направленности датчика не очень острая — примерно градусов под тридцать.
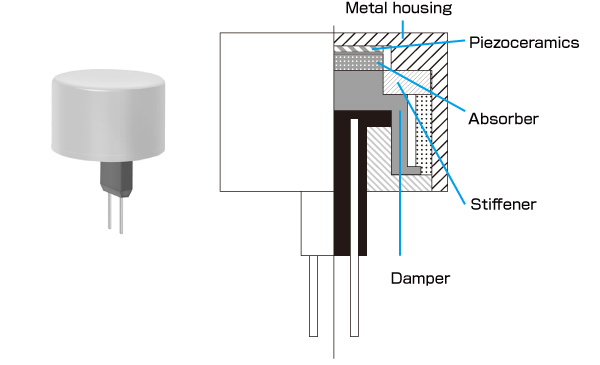
Рис. 40. Пьезоэлектрический ультразвуковой преобразователь: А — входное напряжение приводит к изгибу элемента, что вызывает генерацию ультразвуковых волн. И наоборот, в результате воздействия волн на выходе преобразователя появляется напряжение; Б — ультразвуковой преобразователь с открытой апертурой для работы в воздухе
- Подключаем датчик к питанию и к управляющему устройству
- Посылаем на вход дальномера (Trig) сигнал длительностью 10мкс (или чуть больше, он срабатывает с 10мкс)
- Динамик датчика издает 8 сигналов частотой 40кГц, и микрофон получает их эхо (или не получает)
- Датчик подает на свой выход (Echo) сигнал длительностью соответствующей расстоянию до препятствия: 150мкс (при 2см до препятствия) – 25мс (при 4м до препятствия) и 38мс при отсутствии преграды. На заметку: звук проходит расстояние 4см (2см от динамика до препятствия и 2см обратно до микрофона) за 0.04м / 335м/с = 0,000119с=119мкс и 8м за 8м / 335м/с = 0,023881с = 23,881мс.
Какое время проходит от срабатывания датчика по входному сигналу до начала пункта 3 и от начала пункта 3 до начала пункта 4 нигде не сказано – это скоро будет выяснено мной опытным путём.
Для расчета расстояния до препятствия используются следующие формулы:
- Длина выходного импульса в микросекундах / 58 = расстояние в сантиметрах
- Длина выходного импульса в микросекундах / 148 = расстояние в дюймах
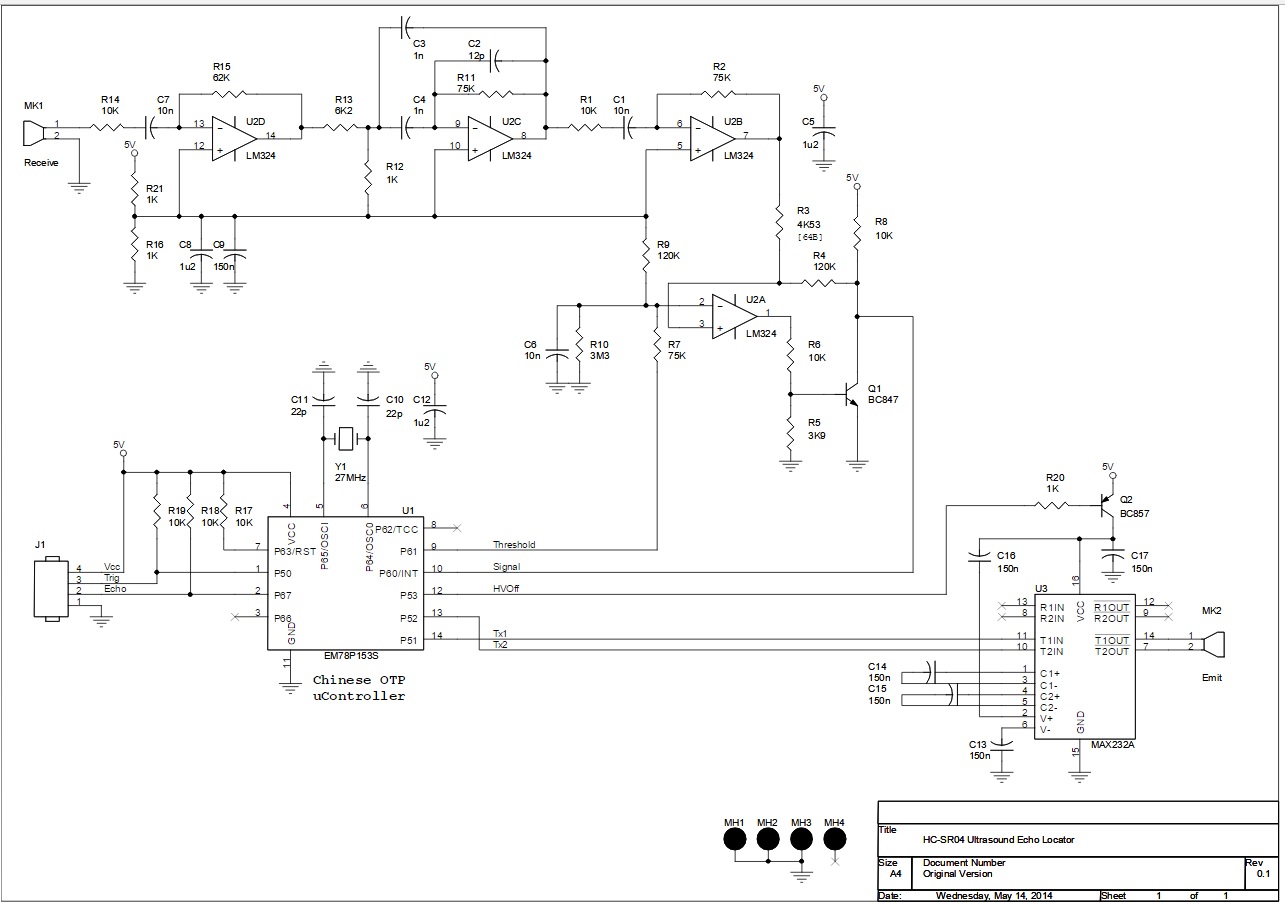
Схема модуля HC-SR04 имеет 2 преобразователя ультрозвуковых сигналов в электрические сигналы малой мощности, один TCT40-16T — (T — Transmiter на схеме обозначен как Emit MK2 смотри схему) предназначен для передачи (эмиссии) ультразвуковых волн в окружаюшее пространство а второй TCT40-16R (R — Receive на схеме обозначен как Receive MK1 смотри схему) для приема отраженных ультрозвуковых волн от предметов окружающего мира.

Для передачи ультразвуковых волн требуется относительно высокое напряжение. Микросхема MAX232 (обозначение на плате — U3 смотри схему) усиливает 5 вольт входного питающего напряжения до +/- 9-10 вольт. Микросхема MAX232 подключается между двумя выходами ( T OUT1 — вывод 14 и T OUT2 вывод 7 смотри схему) , так что на самом деле амплитуда значения напряжения импульсов подающихся на ультрозвуковой передатчик достигает до 20 вольт. Питание подается на микросхему MAX232 через транзистор Q2 (в новой схеме отсутствует и питание подается напрямую на вход 16 микросхемы и в этом случае отключения микроконтроллером не происходит) некоторое время до и во время излучения импульса , так как внутреннее переключение заряда создает избыточный шум на приемной стороне модуля. Когда модуль переходит в режим приема на микросхеме MAX232 отключается питание выходом 10 — Signal микроконтроллера EM78P153S (EM78P153S китайский микроконтроллер работает на частоте
Датчики, предназначенные для автоматов парковки, имеют высокую чувствительность: при резонансной частоте, равной 40 кГц. Дальность действия датчика достигает 1,5 метров при разрешающей способности 9 мм. Выпускаются датчики с различной диаграммой направленности, как симметричной (круговой), так и не симметричной (овальной).
Подключение к Arduino
Если вы планируете использовать ультразвуковой дальномер HC-SR04 с Arduino вы можете воспользоваться существующими библиотеками:
-
— самая популярная библиотека для HC-SR04. — отличается большей точностью и скоростью работы.
- Vcc — положительный вывод питания
- TRIG — вход TRIG
- ECHO — выход ECHO
- GND — ноль питания
На выводы питания подается постоянное напряжение 5 В, потребляемый ток в рабочем режиме около 15 мА.
После приема отраженного сигнала, датчик формирует на выводе ECHO импульсный сигнал, длительность которого пропорционально расстоянию до преграды.
Этот дальномер может служить прекрасным датчиком для робота, благодаря которому он сможет определять расстояния до объектов, объезжать препятствия, или строить карту помещения. Его можно также использовать в качестве датчика для сигнализации, срабатывающего при приближении объектов.
Ультразвуковой датчик — это специальный инструмент, используемый для измерений в промышленной автоматизации. С его помощью можно измерять расстояние, высоту и уровень, а также определять положение в пространстве, обнаруживать наличие объектов и даже подсчитывать их по отдельности. Благодаря этому, УЗ-прибор имеет широкое применение в промышленности. Однако есть некоторые условия, которые могут мешать устройству корректно выполнять задачу. Обо всем этом далее.

Общая информация об ультразвуковых датчиках
Прежде чем разбирать принцип работы конкретных устройств, стоит рассмотреть все аспекты работы ультразвукового датчика.
Принцип работы
Работа ультразвукового датчика заключается в том, что передатчик посылает ультразвуковую волну с частотой от нескольких десятков до нескольких сотен герц, направленную к определенному объекту. Когда волна встречает объект, она отражается от него и возвращается, попадая в приёмник. По времени, в течение которого волна преодолела путь, можно определить расстояние от объекта. В зависимости от типа устройства, это расстояние может варьироваться от нескольких сантиметров до 10 метров.
Генерируемое отражение принимается и преобразуется в электрический сигнал пьезоэлектрическим преобразователем. Прибор измеряет задержку между излучаемым ультразвуковым импульсом и полученным отражением, вычисляя расстояние до объекта, используя значение скорости звука. При комнатной температуре скорость распространения звука в воздухе составляет около 344 м/с.
Самоочищение ультразвукового датчика
В настоящее время, благодаря использованию передовых технологий, ультразвуковое устройство может действовать как датчик приближения, и как аналоговый измеритель расстояния. Большим преимуществом таких детекторов является то, что на их работу не влияют внешние условия окружающей среды, такие как туман, пыль, загрязнение воздуха. Кроме того, датчики также работают с прозрачными объектами, которые создают сильные отражения. Уникальная способность УЗ-устройства, заключается в том, что у них есть функция самоочищения, которой нет ни у каких других датчиков. Это связано с тем, что при передаче ультразвуковых волн, прибор сам настраивается на вибрацию (под воздействием высокочастотных звуков) и таким образом очищается от пыли и других загрязнений.

Диапазон измерения
Точность работы в первую очередь обусловлена диапазоном измерения. Прибор определяет интервал, при этом учитывая все значения, для измерения которых данное устройство предназначено. Основной принцип заключается в том, что измерения всегда более точны в среднем диапазоне, и менее точны ближе к предельным значениям. Диапазон измерения может быть соответствующим образом адаптирован к вашим потребностям. Современные устройства, как правило, имеют несколько различных диапазонов. Они указаны в спецификации продукта. Таким образом, вы можете выбрать нужный датчик для требуемых замеров.

Факторы, влияющие на диапазон измерения
Диапазон измерения УЗ-датчика зависит от свойств поверхности и угла установки объекта. Наибольший диапазон измерения можно получить для объектов с плоскими поверхностями, расположенными под прямым углом к оси датчика. Очень маленькие объекты или предметы, отражающие звук, частично сокращают дальность обнаружения. Объекты с гладкими поверхностями должны быть расположены как можно ближе к датчику, под углом 90°. Поверхности с неровной текстурой обеспечивают больший допуск к отклонению угла объектов.
Следует также учитывать воздействие окружающей среды. Наибольшее влияние на точность ультразвуковых датчиков оказывает температура воздуха. Относительная влажность и барометрическое давление также должны быть учтены.
Материалы, которые может обнаружить ультразвуковой датчик
УЗ-устройства обнаруживают практически все промышленные материалы из дерева, металла или пластика, независимо от их формы и цвета. Объекты могут быть твердыми, жидкими или порошкообразными. Единственным требованием является беспрепятственное отражение звуковых волн в сторону датчика. Однако некоторые объекты могут уменьшить рабочий диапазон устройства. Это объекты с большими, гладкими и наклонными поверхностями, либо с пористой текстурой, например, войлок, шерсть или строительная пена.

Режимы работы ультразвукового датчика
УЗ-прибор может работать в различных режимах. Количество доступных режимов зависит от производителя и программного обеспечения, используемого для управления работой прибора. Но, как правило, у всех устройств они примерно одинаковы.
В режиме непрерывной работы, звуковые волны отправляются циклически, через равные промежутки времени. При обнаружении объекта датчик передает показания на микроконтроллер. В режиме генерации одного импульса, датчик посылает один импульс и делает считывание. Некоторые датчики могут одновременно обнаруживать несколько объектов при работе в этом режиме (при этом каждое считывание записывается в структуру данных).
Стандартно, УЗ-датчики работают в активном режиме — генерируют звук, а затем ждут его отражения. Датчик, работающий в пассивном режиме, не генерирует звук, он прослушивает импульсы, излучаемые другими УЗ-устройствами.

Область применения ультразвуковых датчиков
Эти приборы используются не только для измерений, но и в качестве датчиков обнаружения, то есть, для обнаружения присутствия предметов в поле ультразвука. Таким образом, они могут иметь очень широкое применение в различных отраслях промышленности.
Элементы этого типа обычно используются в качестве датчиков движения, которые зажигают или гасят свет под воздействием движения в поле ультразвука. Точно так же действуют барьеры, применяемые в гаражных залах или на общественных парковках.
В промышленном производстве с их помощью можно контролировать, например, уровень наполнения резервуаров и количество продуктов, находящихся на производственных лентах. Традиционно ультразвуковые датчики также используются для контроля производства печатных плат, которые являются чрезвычайно важным компонентом как простых, так и сложных современных электронных устройств.

Большое количество преимуществ и универсальность этого устройства, делают потенциальный диапазон применения УЗ-датчиков практически неограниченным. Их потенциал в настоящее время не используется в полной мере, но, вероятно, по мере развития технологий он будет увеличиваться.
Принцип работы ультразвукового датчика расстояния
Ультразвуковой-датчик расстояния измеряет дистанцию, которая отделяет его от препятствия перед ним, с помощью звуковых волн, неслышимых для людей (с частотой более 18 кГц). Датчик издает звук, а затем прослушивает его возвращение, вызванное отскоком от препятствия. Время, затрачиваемое звуком на возвращение, дает информацию об его расстоянии от устройства.
Ультразвуковой датчик расстояния имеет два взаимосвязанных устройства: передатчик и приемник. Передатчик генерирует высокочастотные звуковые волны, а приемник прослушивает эхо, возникающее в результате отражения этих волн от препятствия. Датчик измеряет время, прошедшее с момента генерации сигнала, до получения его отражения. Затем время преобразуется в стандартные единицы расстояния, такие как метры и сантиметры. Длительность импульса пропорциональна расстоянию, пройденному звуком, а диапазон частот звука зависит от конкретного датчика. Например, промышленные ультразвуковые датчики используют частоту от 25 до 500 кГц.
Частота работы устройства обратно пропорциональна заданному диапазону расстояний. Звуковая волна с частотой 50 кГц может обнаруживать объект на расстоянии 10 м и более, а волна с частотой 200 кГц ограничивает максимальное расстояние обнаруживаемых объектов до 1 м., следовательно, волны с более низкими частотами могут использоваться для обнаружения объектов, расположенных на больших расстояниях, а волны с более высокими частотами могут использоваться для обнаружения объектов, расположенных ближе. Типичный дешевый ультразвуковой датчик работает в диапазоне от 30 до 50 кГц.
Работа ультразвукового уровнемера
Ультразвуковой датчик уровня устанавливается на верхнюю часть резервуара и передает импульс вниз. Этот импульс, движущийся со скоростью звука, отражается обратно в передатчик от поверхности жидкости. Передатчик измеряет временную задержку между переданным и принятым эхо-сигналом, а бортовой процессор устройства вычисляет расстояние до поверхности жидкости.
Ультразвуковой датчик уровня выполняет расчеты для преобразования расстояния прохождения волны в меру уровня в резервуаре. Промежуток времени между запуском звуковой очереди и получением обратного эха, прямо пропорционален расстоянию между датчиком и жидкостью в сосуде.
Частотный диапазон ультразвукового уровнемера находится в диапазоне 15–200 кГц. Низкочастотные приборы используются для более сложных применений, таких как большие расстояния и измерения уровня твердого тела, а высокочастотные — для более коротких измерений уровня жидкости.

Для практического применения ультразвукового датчика уровня, необходимо учитывать ряд факторов.
В этой статье описаны все основные виды ультразвуковых датчиков для современных УЗИ аппаратов. Для всех типов датчиков указаны основные параметры и характеристики, описание, области применения. Рассмотрим основные (типовые) неисправности и поломки каждого типа и ремонт УЗИ датчиков.
Основные типы датчиков УЗИ:
- Конвексный датчик
- Микроконвексный датчик
- Линейный датчик
- Секторный датчик
- Фазированный секторный датчик
- Внутриполостной датчик (трансректальный / анальный, трансвагинальный, трансуретральный)
- Биплановый датчик
- 3D / 4D (Live-3D) датчик
- Матричный объемный датчик
- Карандашный доплеровский датчик
- Чреспищеводный TEE датчик
- Видеоэндоскопический датчик
- Биопсийные датчики
- Катетерный (интраоперационный) датчик
- Внутрисосудистый датчик
- Лапароскопические датчики
- Монокристальные датчики
- Механические датчики
- Офтальмологические датчики
- Транскраниальный датчик
- Отолорингологические датчики
- Ветеринарные датчики
Важные характеристики УЗИ датчика
Каждый тип датчика современного УЗИ аппарата имеет ряд характеристик:
- Частота [МГц] (основная рабочая частота / набор частот для мультичастотного датчика)
- Радиус кривизны сканирующего модуля [мм] (для конвексных и микроконвексных дачтичков)
- Длина (габариты) сканирующего модуля [мм] для линейных, секрторных и некоторых других датчиков
- Угол поля зрения [градусы]
- Глубина [мм], проникающая способность
- Совместимость с биопсийными наборами
- Перечень совместимых (поддерживаемых) моделей УЗИ аппаратов
- Области применения, режимы и виды УЗИ исследований (совместимые наборы настроек в программно обеспечении УЗИ аппарата)
- Габариты [мм]
- Производитель
В буклетах, промо материалах и даже на сайтах производителей и поставщиков не всегда указываются все эти параметры и характеристики. Часть из них не актуальна для определенных типов датчиков ( так же можно встретить термин ультразвуковой трансдьюсер от англ. "transducer" - датчик). Безусловно важно обращать внимание на частоту (частоты) датчика, но помимо этого необходимо всегда учитывать области применения и совместимые режимы работы, поскольку сама по себе частота не несет исчерпывающую информацию о конкретном датчике.
Свяжитесь с нами: ответим на любые вопросы по ультразвуковому оборудованию. Поможем проверить текущее состояние. Проведем совместную дистанционную диагностику. Или приедем для полноценной проверки на месте.
Конвексный датчик УЗИ
- Частота: 2-7,5 МГц
- Глубина проникновения: до 25 см
Можно встретить также название абдоминальный датчик (из-за основной обрасти его применения)
Частота датчиков такого типа варьируется обычно от 2 до 7,5 МГц, причем в некоторых аппаратах частоты работы датчика могут быть и выше. Многие модели датчиков могу работать с так называемыми гармониками, что делает визуализацию качественнее во многих видах исследований.
Глубина проникновения датчиков этого вида - около 25 см., что вполне достаточно для всех областей его применения. Габариты отображения исследуемого органа на несколько сантиметров шире самого датчика. т.е. конвексные датчики обладают относительно широким полем зрения.
Ультразвуковые датчики данного типа применяются для исследования глубоко расположенных объектов: абдоминальные исследования (общие исследования брюшной полости), тазобедренные суставы, половая система и др. То есть, конвексные датчики применяются как в общей практике, в акушерстве и гинекологии, так и в других областях.
Конвексный датчик поставляется с большинством современных аппаратов УЗИ. он, конечно, может отсутствовать в некоторых случаях, но в основном представить без абдоминального конвексного датчика многоцелевой УЗИ сканер широкого профиля практически невозможно.
Частые неисправности данного типа узи датчика:
- Стирание акустической линзы
- Проблемы с кабелем, манжетой
- Выход из строя пьезоэлементов
- Трещины на корпусе
Микроконвексный датчик УЗИ
Датчик по своему строению идентичен конвексному, разница только в том, что микроконвексный датчик меньше в размерах.
Применяется он, как правило, для тех же исследований, но только в педиатрии.
Если говорить о технических параметрах, радиус кривизны сканирующего модуля у микроконвексного датчика больше, так как сам модуль меньше по габаритам.
Частоты работы в общем соответствуют обычным конвексным датчикам, но могут быть выше, поскольку микроконвексному типу датчиков не требуется такая высокая проникающая способность.
Линейный УЗИ датчик
Частота данного типа узи датчиков варьируется от 5 до 15 МГц. Глубина сканирования составляет не более 11 см. Основная особенность линейного датчика - полная пропорциональность исследуемого объекта положению линейного узи датчика, но сложностью является, что невозможно обеспечить полное прилегание узи датчика к исследуемым поверхностям. Данные датчики используются для исследований поверхностных структур, таких как молочная железа, щитовидная железа, маленьких суставов и мышц и для осмотра сосудов.
Ультразвуковой датчик получил широкое применение в автоматизации процессов на предприятиях различного масштаба. На сайте вы найдете продукцию от ведущих европейских компании по оптимально низкой цене. Устройства прослужат вам много лет и позволят добиться высокой эффективности труда. Принцип работы ультразвукового датчика расстояния основывается на распространении звуковых волн, а именно на их свойстве. Они могут отражаться от препятствии, которым выступает объект измерения.

Для такого радарного уровнемера характерны небольшой диапазон измерения и незначительная скорость измерения. Помимо этого устройство обладает преимуществами: высокой точностью работы, они не чувствительны к запыленности в воздухе, цветовому решению объекта, могут работать при различных температурах.
Принцип работы ультразвукового датчика расстояния
В основе ультразвукового датчика расстояния лежит преобразователь, объединяющий активный компонент и диафрагму. Преобразовывающий элемент может работать как приемник и как передатчик. Активный компонент создает короткий импульс и воспринимает его от препятствия. Для его изготовления используют пьезоэлектрический материал, а для диафрагмы — алюминий. Последний элемент выступает контактной поверхностью ультразвукового датчика и характеризует его акустические свойства. Сам преобразователь в последствии поглощает вибрации за счет упругого основания.
Когда внешний сигнал получен, активный компонент провоцирует вибрации диафрагмы, которая затем направляет ультразвуковые импульсы в пространство. Сталкиваясь с препятствием, импульсы отражаются, и как следствие, возвращаются к преобразователю, порождая вибрации активного элемента. С последнего и снимается электрический сигнал.
Такой принцип работ обусловил широкое применение ультразвукового датчика уровня. Его можно увидеть в самых различных сферах. Это универсальное средство, с помощью которого решают многочисленные задачи автоматизации производственных процессов. Ультразвуковой датчик уровня воды используется для определения расхода топлива, измерения расстояния, осуществления контроля за передвижением объекта. И это далеко неполный перечень функциональных возможностей. Ультразвуковой датчик уровня воды абсолютно не боится загрязнений и демонстрирует стабильную работу в неблагоприятных условиях.
Читайте также:
- Программа творческой методической и культурно просветительской деятельности школы
- Что изучает физическая география россии кратко
- Актуальность лоскутного шитья в наше время кратко для проекта
- Каковы были цели революции 1848 1849 в германии как различались взгляды великогерманцев кратко
- Что такое мутация когда и где происходят мутации кратко 9 класс