
Сообщение по теме мышцы робота
Обновлено: 14.05.2024
Разработаны мягкие искусственные мышцы, приводимые в движение электричеством и способные поднимать груз массой на три порядка больше собственной. Разработка выполнена инженерами из Колумбийского университета, статья о ней опубликована в журнале Nature Communications (Miriyev et al., Soft material for soft actuators).
Как правило, в качестве привода для роботов и других механических устройств используются моторы. Некоторые инженеры создают устройства с искусственными мышцами, главная задача которых – сокращаться и расширяться под действием определенного стимула. Зачастую таким стимулом служит повышение или понижение давления с помощью пневматических устройств. Однако этот подход имеет ряд ограничений – например, такие искусственные мышцы необходимо снабжать компрессором.
Авторы новой разработки создали мягкий актуатор, приводимый в движение электричеством. Он устроен следующим образом. Большую часть актуатора составляет эластомер, через который проходит металлический провод. В эластомере также находятся небольшие пузырьки с жидким этанолом. При прохождении тока провод, а следовательно, и сам актуатор с пузырьками нагреваются, из-за чего этанол, испаряясь, расширяется в объеме. Если затем прекратить подачу тока, актуатор остынет, этанол снова конденсируется и его объем уменьшится.

Принцип расширения актуатора
Процесс создания нового актуатора занимает всего несколько десятков минут. Для этого необходимо смешать несколько недорогих исходных материалов, залить их в форму и подождать, пока они затвердеют. Альтернативой этому способу авторы разработки называют также использование 3D-принтера.
Искусственные мышцы на основе актуатора из этанола способны поднимать объекты массой в тысячу раз больше собственной. Стоит отметить, что само по себе это устройство выполняет функцию, немного отличную от функции живых мышц, ведь основное его действие – расширение, а не сокращение. Впрочем, если актуатор держать в нагретом состоянии и охлаждать для сокращения, то он в точности будет соответствовать движениям мышц.
Недавно исследователи разработали искусственные мышцы на основе пневматики, а недавно другая группа ученых создала электрохимический актуатор, управляемый подачей небольшого напряжения. Его принцип действия основан на том, что напряжение заставляет ионы встраиваться между слоями материала и тем самым расширять его.
Читать статьи по темам:
Читать также:
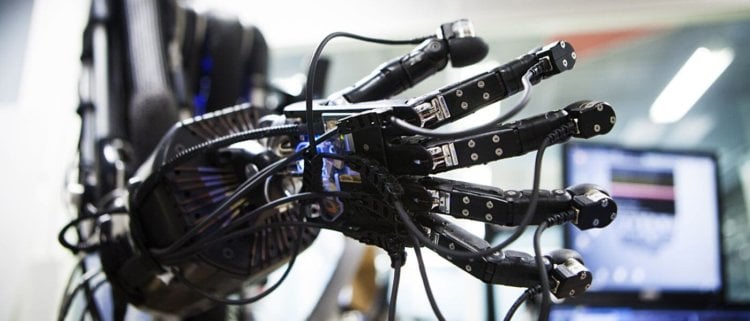
Aslan – роботизированная рука для сурдоперевода
Первая версия робота является 3D-печатной и может быть собрана за несколько часов. Но конечной целью команды является создание двурукого робота с выразительным лицом.
Киборгизацию – в массы!
15 июня в России был сделан первый шаг на пути к массовой киборгизации: в Москве успешно прошло первое в России соревнование людей с высокотехнологичными протезами – Кибатлетика.
Киберзрение, по словам специалистов, – один из способов дать людям, лишенным этого естественного дара природы, вновь начать жить нормальной жизнью.
Exoatlet Asia
Нейротранзистор
Новые искусственные мышцы, разработанные специалистами из Национального университета Сингапура, позволят создавать более совершенных роботов, чьи способности по подъему грузов будут намного превосходить человеческие, сообщает E&T.
В настоящий момент большинство созданных роботов-силачей обладают гидравлическими системами, не отличающимися высокой скоростью. Сингапурским ученым удалось разработать искусственные мышцы, которые позволят роботам двигаться более естественно. Изготовленные с использованием полимерных материалов, мышцы способны поднимать груз, в 80 раз превышающий их собственный вес. При этом они могут растягиваться в 5 раз. Роботы с такими мышцами составят конкуренцию даже муравьям, которые, как известно, могут поднимать груз, масса которого превышает в 20 раз их собственный вес.
"Разработанные нами материалы напоминают человеческие мышцы, быстро реагирующие на электрические импульсы", - говорит один из авторов работы Эдриан Ко. - "Искусственные мышцы гибкие, эластичные и способны изменяться за считанные доли секунды как настоящие мышцы. Кроме того, новый материал обладает большей прочностью".
До настоящего времени искусственные мышцы имели ограниченные возможности. Они могли растягиваться не более, чем в три раза, при этом они могли поднимать груз, вес которого не превышал половины их собственного веса. Новые искусственные мышцы также могут преобразовывать кинетическую энергию в электрическую.
Потенциал искусственных мышц велик, считают сингапурские ученые. Потенциально такие мышцы способны увеличиваться в длину в 10 раз и поднимать груз, вес которого в 500 раз превышает их собственный.
Робот Athlete использует совершенные мышцы, позволяющие ему бегать и падать как настоящему человеку
Ранее, в 2010 году нам стало известно о сенсационном роботе, роботе - атлете.
Силовые системы Athlete используют пропорциональные клапаны, трансформирующие электрический сигнал в непрерывный поток воздуха. Используемые искусственные мускулы обладают очень высоким соотношением мощности к весу – к примеру, робот способен прыгать на полметра в высоту, что весьма неплохо для его размеров. А благодаря большой эластичности конструкции (сжатый воздух и электричество подаются от внешних источников) Athlete мягко приземляется при падении с высоты 1 м – не стоит и говорить, чем оборачивается подобное событие для роботов с традиционными приводами. При всем при этом, разработка японского исследователя весит всего 10 кг, а рост составляет 125 см.

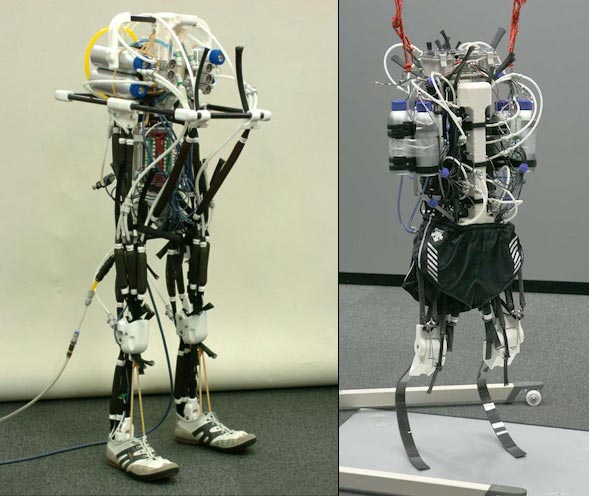
Использование пневматики, гидравлики и серво-приводов в роботах позволяет делать их быстрыми и сильными. Однако минусом такого подхода является большой вес и размер. Если вы видели робота ATLAS, то не примете его за человека — слишком типичен его механический вид. Для создания андроидов и искусственных тел, для замены органики, ученым потребуется создать множество искусственных частей тела. И мышцы являются одним из основных элементов в этой головоломке.
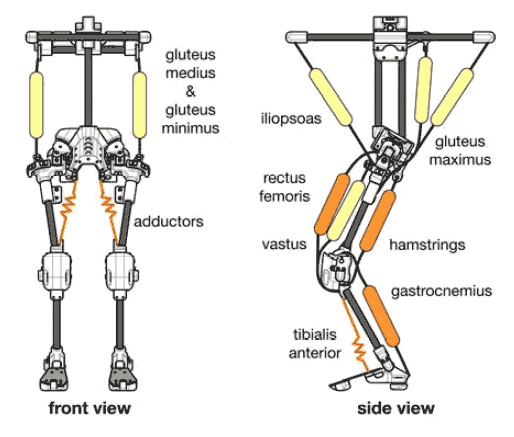
Исследователи из лаборатории Suzumori Endo Robotics Laboratory в Токийском Институте использовали искусственный скелет человека, который покрыли большим числом искусственных мышечных волокон. Подобно реальным мышцам, эти волокна сжимаются и разжимаются под действием электрического тока. Управляя группами мышц в разное время, руки, ноги и голова скелета способны двигаться подобно человеку — хотя, пока и не очень грациозно.
Ноги робота оснащены тем же набором мышц (но немного меньше), что и реальные ноги человека. Работают нынешние мышцы значительно медленнее биологических, однако технология будет развиваться. Кто знает, возможно к 2030-му у нас таки будут искусственные конечности, не только не уступающие, но превосходящие органику.

Каких только роботов мы уже не рассматривали, но тут все иначе. Теперь у роботов могут появится живые мышцы.
Ученые из Токийского университета промышленных наук создали биогибридного робота — роботизированное устройство, содержащее живую ткань, — который проработал больше недели. Первый шаг в создании биогибридного робота — создать скелет робота. Ученые создали свой вариант, используя 3D-печатную смолу. К скелету добавили суставы и анкеры, к которым можно было крепить живую ткань. Электроды должны были стимулировать живые мышцы, заставляя их сжиматься.
Следующим шагом стало создание живой мышцы. Для этого команда взяла миобласты, тип стволовых клеток, которые в конечном итоге созревают в различного рода мышечные клетки. Эти клетки были включены в гидрогелевые пластины. Затем ученые пробили дырки в пластинах, чтобы прикрепить их к анкерам скелета, и добавили несколько полосатых структур, которые должны стимулировать рост мышечных волокон между анкерами.
Статья с описанием разработки опубликована в Science Robotics. Исследователи создали актуатор, использовав в качестве его основы клетки-миобласты, взятые из скелетной мышечной ткани крыс. Они поместили раствор с клетками и питательной средой для них в гидрогель, который затем залили в специальную форму. Через некоторое время в гидрогеле образовывалась мышечная ткань, способная сокращаться.
Механическую часть актуатора выполнена из полимера, а также шарнира. С двух сторон актуатора располагаются полоски мышечной ткани, жестко закрепленные с одного конца, а с другого связанные с шарниром с помощью париленовых пленок. За счет такой конструкции шарнир может двигаться в обе стороны, в зависимости от того, с какой стороны сокращается мышца.

Для управления сокращениями мышц исследователи расположили рядом с их концами электроды. Создаваемое между парой электродов электрическое поле заставляет сокращаться находящуюся рядом мышцу, но не влияет на мышцу с другой стороны актуатора. Исследователи продемонстрировали, что актуатор может отклонять шарнир почти на 90 градусов, и за счет этого выполнять различные движения, например, переносить небольшие объекты.
Наши результаты показывают, что, используя эту антагонистическую структуру мышц, роботы могут имитировать действия человеческого пальца. Если мы сможем объединить больше этих мышц в единое устройство, то сможем воспроизвести сложное мускульное взаимодействие кистей, рук и других частей тела,
Группа исследователей из Школы инженерии и прикладных наук Колумбийского университета разработала новый тип синтетических мягких мышц, производить которые можно с помощью технологии 3D-печати. Материал получился очень прочным и способен выдерживать вес в 1000 раз превосходящий его собственный, а предел его энергии упругой деформации (растяжения) в 15 раз выше в сравнении с тканями настоящих мышц.
Материал не требует использования внешнего источника для управления давлением, что часто встречается в других существующих решениях, которые полагаются на энергию пневматической или гидравлической инфляции (надува). Эти компоненты, как правило, занимают много места, что делает их неудобными в использовании при создании машин, где важна компактность и независимость.
Основой синтетических мышц служит силиконовый каучук, имеющий пористую структуру с заполнением этанолом. Материал приводится в работу с помощью электрического тока малой мощности, передаваемого по очень тонким проводам с высоким сопротивлением.
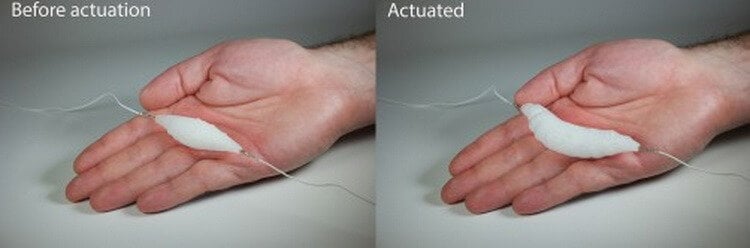
Синтетическая мышца перед и после приведения в действие
Действия, связанные с захватом объектов и манипуляцией ими, требуют наличия некоторого уровня ловкости и гибкости, обеспечить который нынешние технологии не в состоянии. Новые же материалы, подобные тому, о котором идет речь в данной статье, позволят создавать роботов, способных манипулировать мягкими и маленькими объектами, не нанося им каких-либо повреждений.
Машины, использующие подобные технологии, смогут обеспечивать надежную помощь человеку в работе в ситуациях, где требуются деликатные действия, например, в медицине. Вполне возможно, что подобные материалы начнут использоваться уже в протезах нового поколения, которые смогут обеспечить уровень контроля гораздо выше, чем обеспечивают нынешние протезы.
Сейчас же ученые из Колумбийского университета планируют усовершенствовать синтетические мышцы и заменить использующиеся провода высокого сопротивления на высокопроводящие материалы, чтобы увеличить скорость и эффективность отклика мышц.
Читайте также: