
Протез управляемый силой мысли сообщение
Обновлено: 08.07.2024

Обзор
Приходит время поздороваться с будущим: управляемые человеческим мозгом роботы уже начинают входить в нашу повседневную жизнь.
Автор
Редакторы

Этап первый: кохлеарные аппараты
Самый популярный и самый первый по времени разработки — кохлеарный имплантат. В 1748 году Бенджамин Уилсон использовал лейденскую банку, чтобы стимулировать слух у глухой женщины. В 1957 году два французских врача имплантировали во внутреннее ухо пациенту устройство, которое непосредственно стимулировало слуховой нерв. Вскоре после этого в 1961 году доктор Уильям Хаус разработал первый кохлеарный имплантат с одноканальными электродами. Затем в конце 1970-х были разработаны имплантаты с многоканальными электродами [2]. Использование многоканального электрода позволило создать более сложный и реалистичный сигнал, за счет стимуляции улитки.
Имплантат состоит из внешней части, которая находится за ухом, и внутренней, которую хирургически помещают под кожу (рис. 1). Имплантат состоит из следующих устройств:
- Микрофон, который воспринимает звуки из окружающей среды.
- Речевой процессор анализирует и оцифровывает звуковые сигналы и отправляет их в приемник.
- Передатчик и приемник принимают сигналы и преобразуют их в электрические импульсы.
- Электродная решетка, представляющая собой группу электродов, собирает импульсы от стимулятора и отправляет их в разные области слухового нерва.

Рисунок 1. Схематическое изображение уха с кохлеарной имплантацией. Микрофон и речевой процессор (внешнее устройство) принимают звуковые сигналы от внешнего мира и передают информацию в приемник/стимулятор (внутреннее устройство), который соединен с электродной решеткой.
Имплантат не восстанавливает нормальный слух, зато помогает понять речь окружающих.
Кохлеарный аппарат сильно отличается от слухового аппарата тем, что слуховые аппараты усиливают звуки, чтобы их можно было обнаружить поврежденными ушами. Кохлеарные имплантаты обходят поврежденные участки уха и непосредственно стимулируют слуховой нерв. Сигналы, генерируемые имплантатом, отправляются через слуховой нерв в мозг, который распознает их как звук. Слух через кохлеарный имплантат отличается от обычного слуха и требует времени для изучения или переучивания. Благодаря имплантату люди могут понимать речь других людей и звуки окружающей среды.
Текущей областью исследования является разработка полностью имплантируемого устройства. Для воплощения этого в реальность нужно, чтобы микрофон был малым и очень чувствительным. Кроме того, аккумуляторная батарея должна иметь достаточно долгий срок службы и самозаряжаться, а вся система должна быть достаточно мала, чтобы полностью имплантироваться.
Этап второй: робо-руки и робо-ноги
Что же такое нейропротезирование? Это вредно?
Нейропротезирование или нейронное протезирование — это область биомедицинской инженерии и нейробиологии, связанная с разработкой нейропротезов и их эксплуатацией. Систему впервые применили для замены сенсорной и двигательной функций. И ученые исследуют разные варианты доставки сигналов в нервную систему. На рисунке 2 изображены известные на данный момент способы [4].

Рисунок 2. Способы доставки сигналов от датчиков в нервную систему. Узловые сенсоры располагаются в местах сгибания механических пальцев. Контактные сенсоры — сенсоры, контактирующие с предметами. Чтобы увидеть рисунок в полном размере, нажмите на него.
Исследователи протезирования теперь пытаются предоставить протез, который будет чувствовать предметы не хуже настоящей руки, а возможно, даже лучше. Ведь такой протез может поднять предметы весом до 20 кг!
Способы доставки сигналов разделяются на электрическую стимуляцию нервов в культе (рис. 2а), перенаправление нервов на другие участки тела (например, на грудные мышцы) (рис. 2б) и прямое поступление импульсов в мозг и обратно (рис. 2в)
Что такое целевая реиннервация?
После ампутации конечности в организме остаются двигательные нервы, которые ее контролировали. Остатки нервов можно хирургическим путем перенести на маленький участок какой-нибудь крупной мышцы (это и называется реиннервацией). Например, к большой грудной мышце, если речь идет об ампутированной руке. В результате человек думает, что надо бы пошевелить пальцем. Мозг отправляет сигнал участку грудной мышцы, к которой присоединили нерв, шедший раньше к пальцам. Сигнал фиксируют электроды, которые отправляют импульс по проводам в процессор внутри роботической руки. Тут помогает электромиография. Эта технология позволяет регистрировать разность электрических потенциалов, возникающих при работе мышцы. Она улавливает движение реиннервированного участка грудной мышцы, после чего сигнал передается к нужной части протеза, и эта часть двигается.
Аналогичным образом осуществляется целевая сенсорная реиннервация. Она нужна для того, чтобы при помощи протеза человек мог чувствовать прикосновение, тепло или давление. Тут все в обратном порядке. Хирург перешивает уже оставшийся чувствительный нерв к участку кожи на груди. А сенсоры на протезе передают сигнал от прикосновения к этому самому кожному участку. И человек испытывает тактильные ощущения.

Рисунок 3. Джесси Салливан с нейропротезами.
Видео. Протез для Мелиссы.
А что, если связь нервов со спинным мозгом разорвана? Как тогда будут поступать сигналы в головной мозг от протеза?
Действительно, если разорвана связь со спинным мозгом вследствие травмы или заболевания, то методы перенаправления нервов или использование оставшихся нервов в культе не будут работать. Поэтому исследователи придумали другой изощренный подход: забраться в головной мозг (рис. 2в) и стимулировать определенный участок. Забраться в мозг не так уж и трудно, тем более что определенные участки мозга контролируют определенные части тела. Человеком, впервые испытавшим на себе такую методику, был 56-летний Билл Кочевар. Он оказался парализован в результате несчастного случая и смог пошевелить телом ниже плеч благодаря новой технологии имплантации.
Предназначена ли протезная нога для высоких каблуков?
Студенты из Университета Джонса Хопкинса [5] разработали первый протез, который может адаптироваться к разной высоте пятки. Задача была очень сложной: создать ногу, которая настраивается без инструментов на определенную высоту пятки, удерживает положение без скольжения и выдерживает вес до 113 кг, при этом должна весить не более 1,5 кг! А также должна быть достаточно узкой, чтобы носить женскую обувь. Студенты построили механизм регулировки пятки с двумя блокирующими алюминиевыми дисками. Он открывается и закрывается прикрепленным рычагом на лодыжке. Для лодыжки они использовали готовый гидравлический блок, который обеспечивает гладкую походку и изгиб на подошве. У команды был прототип ноги, испытанный семью людьми, который крепили к нижней части громоздкого ботинка, что немного похоже на ходьбу на ходулях (рис. 4) .

Рисунок 4. Тестирование лодыжки.
Этап третий: бионический глаз — реальность или вымысел?
Рассмотрим рисунок 5.

Рисунок 5. Схема устройства Argus ll.
Как мы остановим хакеров от вторжения в наши мозги, когда мы будем киборгами?
Стремительно развиваются взаимодействия между мозгом и компьютером. И эти технологии могут в конечном итоге превратить людей в настоящих киборгов. Однако до того как это случится, нам нужно удостовериться в безопасности нейронных устройств и защите их от хакерских угроз.
С мечтами о нашем светлом кибернетическом будущем исследователи опубликовали на портале Science свою работу Help, hope, and hype: ethical dimensions of neuroprosthetics [9]. Авторы поставили себе задачу не только описать те возможности, которые перед нами откроет сфера нейротехнологий, но и привелчь общественное внимание к тем опасностям, которые могут подстерегать нас на пути к этому сверхвысокотехнологичному будущему.
У всех таких технологий, к сожалению, есть и обратная сторона. Вокруг этой области начинают появляться серьезные этические вопросы, и поэтому самое время начать думать о том, каким образом нейропротезирование и сфера разработок мозг—машинных интерфейсов могут привести к злоупотреблениям в будущем, а также о том, как от этого защититься.
Уже сейчас мозг—машинные интерфейсы можно использовать для того, чтобы, управляя роботизированной рукой, схватить чашку или, смотря на экран компьютера, выбрать определенное слово в тексте. Но когда-нибудь такие устройства, только более продвинутые, будут использоваться как аварийным работником для ликвидации опасной утечки газа, так и мамой ребенка, у которой не хватает лишних рук, чтобы успокоить своего плачущего малыша. Что, если в этой ситуации что-то пойдет не так, например, робот-нянька случайно выронит ребенка? Важно задать себе вопрос: где начинается и заканчивается зона ответственности, и кто в таких случаях должен быть признан виновным? Была это ваша оплошность по невнимательности или ошибка робота? Как сравнить ответственность человека с нейропротезом и человека, случайно совершившего тот же проступок своими руками? Лежит ли ответственность за такие сбои на производителях? Или на ученых? Доверяя ребенка роботу, осознавали ли вы, что устройство может выйти из строя? Юридической системе будущего придется определять, находится ли нарушение в зоне ответственности производителя роботизированного изделия (в конструкции найден брак или программная ошибка) или пользователя (неправильное использование или внешнее неавторизованное воздействие на целостность конструкции).
Возможное решение этой проблемы будет включать повышенный уровень шифровки информации, создание надежной сетевой безопасности и открытого коммуникационного канала между производителем изделия и его пользователем. Настает время задуматься над путями, которые позволят всем выработать стандарты по разработке необходимых защитных мер.
Заключение
Нейропротезирование — глобальная тема для будущего. Технологии становятся реальностью благодаря усердному труду ученых. Возможно, в будущем ученые разработают когнитивные имплантаты, делая нас более умными и сильными. Станем ли мы киберобществом [10]?
Иллюстрации: Дмитрий Лисовский, ITMO.NEWS
Протез состоит из кисти с электромеханическим приводом, культеприемной гильзы, механизма ротации кисти, ЭМГ-датчиков, аккумулятора, зарядного устройства, электрокабелей и, по желанию пользователя, косметической оболочки.
Бионический протез разрабатывается максимально похожим антропоморфно на человеческую руку, поэтому нужно знать ее вес и размер: ширину кисти и длину пальцев. Они подбираются исходя из возраста пользователя. Далее после производства также индивидуально располагаются ЭМГ-датчики, которые считывают мышечную активность и передают управляющий сигнал на контроллер протеза.
Протез держится на руке с помощью культеприемной гильзы, которая соединяет протез и руку. Гильза плотно прилегает к руке и находится внутри протеза, в нее вставляется имеющаяся часть конечности. Гильза также изготавливается индивидуально для каждого пользователя.
Управление протезом происходит с помощью датчиков мышечной активности, которые встроены в культеприемную гильзу. Они считывают электрический потенциал с мышц в момент их сокращения. Информация с датчиков передается на микропроцессор кисти и через компьютерные алгоритмы преобразуется в двигательные команды, и протез выполняет определенный жест или хват.


Есть два основных направления развития протезов в технологическом плане: совершенствование человеко-машинного интерфейса, которым управляются протезы для достижения мелкой моторики и управления отдельными пальцами, а также технологии очувствления протезов. Это необходимо, чтобы человек мог ощущать, какой предмет и как он берет.
Бионические протезы в России можно получить по государственной программе бесплатно. Но сейчас очень маленький процент людей без конечностей пользуются протезом. Причины разные, но одна из них — это не всегда простая система оформления необходимых документов. Важно сделать эту систему максимально прозрачной и простой для всех людей с инвалидностью. Когда все люди без рук или ног начнут использовать протезы, процесс изготовления протеза перейдет на другой уровень. Он станет доступнее и дешевле.
Исландская компания Össur, занимающаяся биоинженерией, а также разработкой, производством и продажей различной ортопедической продукции и протезов, объявила об успешном создании бионического протеза ноги, управляемого человеческим мозгом. Новая технология использует специальные имплантируемые сенсоры, которые посылают беспроводные сигналы во встроенный в искусственную конечность микрокомпьютер, позволяя человеку управлять ею практически на уровне подсознания, обеспечивая быстрый и естественный отклик и движения.

Протезы, управляемые мышечными импульсами, появились еще в конце 1960-х годов, однако данная технология до сих пор имеет ряд ограничений. Принцип ее работы основан на установке и использовании на коже специальных сенсоров, которые улавливают электрические разряды и позволяют на их основе управлять, например, искусственной рукой. Проблема заключается в том, что эти сенсоры улавливают электрические импульсы не одной отдельной мышцы, а всех сразу. Это в свою очередь снижает производительность искусственной конечности и требует от человека огромной практики, чтобы правильно управляться с протезом. Кроме того, такие протезы очень медлительны, неудобны, неточны и, в конце концов, совершенно непохожи на естественные конечности.
Одним из решений этого вопроса может являться использование более точных сенсоров, позволяющих управлять протезом силой мысли человека. Данный метод уже показал некоторые успешные результаты в случае с протезами верхних конечностей, однако с нижними конечностями успехи выглядели совсем не радужно.

Суть проблемы заключается в том, что управлять верхними искусственными протезами можно более сознательно, чем нижними. Мы используем руки для того, чтобы что-то взять, поднять или прикрутить. Другими словами, мы совершаем более координированные действия. Однако ноги мы используем для ходьбы, и управляем мы ими менее сознательно, фактически на уровне рефлексов, которые посылаются в качестве команд спинным, а не головным мозгом.
Например, когда мы надеваем носки на ноги, то мы не думаем о всех тех сложных сериях движений, которые выполняются в этот момент. Мы просто натягиваем носки под воздействием интуиции и согласно нашим рефлексам. Ноги в этом случае сами делают то, что они должны делать. Однако без этого автоматического контроля со стороны нашей нейромышечной системы даже обычное перешагивание через порог будет каждый раз восприниматься нами как большое достижение.

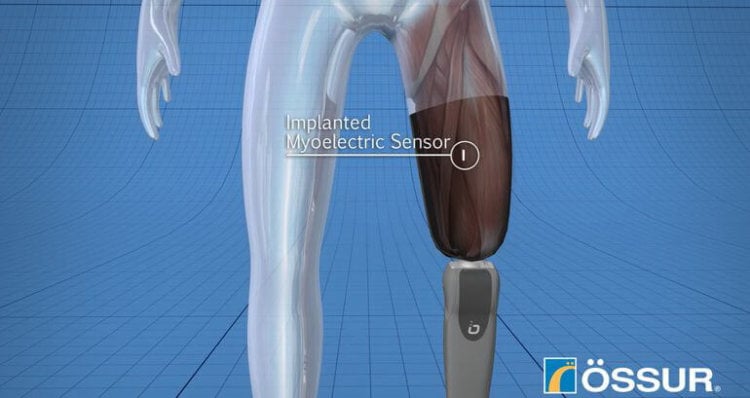
Основой системы управления таким протезом являются имплантируемые в протезируемую конечность миоэлектрические сенсоры (IMES), разработанные в организации Alfred Mann Foundation. Размером со спичку эти сенсоры имплантируются в определенные оставшиеся мышцы в культе. Находящийся в протезе специальный ресивер принимает передаваемые на сенсор мышцами импульсы и беспроводным способом передает их на микрокомпьютер протеза. В этом случае вся система искусственной конечности действует как один единый кибернетический имплантат, сигналы на который подаются спинным мозгом. В результате человеку не требуется осознанно выполнять те или иные действия для управления искусственной конечностью. Протез управляется практически на подсознательном уровне.
Технология в течение года проходила испытания при участии двух добровольцев, которые очень положительно о ней отозвались. Планируется проведение дальнейших клинических испытаний.

У людей, потерявших руки или ноги, появился реальный шанс на возвращение к полноценной жизни. Это стало возможным благодаря модульным нейропротезам, управлять которыми можно силой человеческой мысли.
Американские ученые из нью-йоркской Лаборатории прикладной физики Джонса Хопкинса создали первый полноценный нейропротез конечностей, управляемый импульсами человеческого мозга.


Свою разработку учёные продемонстрировали на одном из добровольцев, который в результате несчастного случая, произошедшего много лет назад, остался без обеих рук. Механические конечности из инновационных материалов практически в точности повторяют человеческие руки. Закрепили протез на специальном корсете, который надевается на спину и плечи пациента.

Управление конечностями осуществляется за счет электронных импульсов, от мозга человека. В сущности, система управления протезом полностью копирует нервную систему человека. Команды распознаются моментально и вскоре после периода адаптации, человек сможет управлять протезом также интуитивно, как и живыми руками. Чуть больше времени понадобится на то, чтобы отточить силу сжатия предметов в ладони.

Медицина и наука двигаются вперёд просто семимильными шагами. Поэтому 10 искусственных человеческих органов, которые скоро можно будет себе установить , сегодня уже можно рассматривать, как надвигающуюся реальность.
Читайте также: