
Навигационное сообщение снс передается со скоростью
Обновлено: 03.05.2024
Мировой спрос на портативную навигационную аппаратуру постоянно растет. По данным зарубежных аналитиков, объем производства этого оборудования ежегодно увеличивается примерно вдвое. Столь стремительный рост в определенной степени обусловлен техническими усовершенствованиями, внедряемыми
От низких к средневысотным
В отличие от наземных радионавигационных систем, чьи радиосигналы излучаются стационарными земными радиомаяками, координаты которых заранее известны потребителям, в спутниковой радионавигации применяются космические радиомаяки или навигационные КА. Орбитальная группировка из нескольких КА на негеостационарной орбите создает у поверхности Земли и в околоземном пространстве глобальное радионавигационное поле, позволяющее определять координаты объектов.
Применение современных технологий сделало космические маяки более эффективными (энергетически и спектрально), а навигационную аппаратуру потребителей — более миниатюрной и относительно недорогой. Эти системы обеспечивают при одновременном приеме сигналов от четырех средневысотных КА определение трех пространственных координат, скорости движения и точного времени. Аппаратура потребителя работает в пассивном режиме, поэтому навигационными услугами может пользоваться неограниченное число желающих точно определить свои координаты.
Наиболее важное отличие систем 2-го поколения — глобальность зоны покрытия. По сути, такая система — это глобальная навигационная сеть, в которой поддерживаются не только координация пространственного положения всех ее КА, но и временная синхронизация радионавигационных сигналов, излучаемых спутниками.
Двойное назначение
Управление и эксплуатацию системы, а также запуск спутников осуществляют военно-космические силы России.
Точности определения навигационных параметров для потребителей (с вероятностью 99,7%) следующие:
- координаты — 50—70 м в горизонтальной плоскости, 70 м в вертикальной плоскости;
- скорость движения — 15 м/с;
- точное время — 1 мкс.
Сигналом высокой точности обычные потребители не могут воспользоваться без согласования с МО РФ, он предназначен только для нужд военных.
Навигационные данные передаются путем инвертирования псевдослучайных последовательностей обоих сигналов.
Навигационный радиосигнал, излучаемый на нижней рабочей частоте L2, — однокомпонентный. Это широкополосный шумоподобный радиосигнал, модулированный псевдослучайной последовательностью с тактовой частотой 5,11 МГц без инвертирования символов и не содержащий навигационных данных.
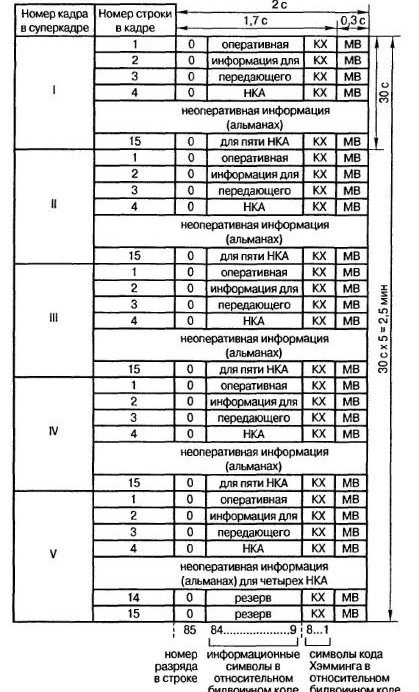
Информация, передаваемая с навигационного КА, жестко структурирована. Группа из 15 строк объединена в кадр длительностью 30 с, а пять навигационных кадров образуют суперкадр длительность 2,5 мин. Границы строк, кадров и суперкадров всех КА синхронизированы так, чтобы погрешность не превышала 2 мс. Cимвольная синхронизация для метки времени осуществляется с помощью меандра, сама метка служит для строчной синхронизации навигационных данных.
Эфемериды КА и альманах
В составе каждого кадра передается полный объем оперативной информации и часть альманаха системы. Полный альманах содержится во всем суперкадре. При этом информация суперкадра, содержащаяся в строках 1—4, относится к тому спутнику, с которого она поступает (оперативная часть), и не меняется в пределах суперкадра.
Информация пятой строки (общие временные параметры группировки) повторяется в каждом кадре суперкадра. Строки 6—15 любого кадра заняты данными альманаха для 24-х спутников; в кадрах 1—4 содержится информация о 20 КА, в пятом кадре — о четырех. Альманах одного спутника занимает две строки (см. рис. 1).
Орбитальная группировка
Антенно-фидерная система выполнена в виде решетки из двух групп спиральных излучателей: центральной (четыре излучателя) и периферийной кольцевой (восемь излучателей на кольце диаметром 85 см).
Система электроснабжения включает в себя солнечные и аккумуляторные батареи. Две панели солнечных батарей (размах — 7,23 м, площадь — 17,5 м 2 ) обеспечивают рабочую мощность 1250 Вт. При прохождении спутником теневых участков Земли и Луны питание бортовых систем осуществляется за счет аккумуляторных батарей емкостью 70 А?ч.
Бортовой навигационный комплекс обеспечивает формирование высокостабильных фазоманипулированных радиосигналов и их одновременное излучение на верхней (L1) и нижней (L2) рабочих частотах. Генерация высокостабильных опорных частот осуществляется бортовым хронизатором. Его составляющие — цезиевый стандарт частоты, чье относительное среднеквадратическое отклонение среднесуточных значений частоты не превышает 4?10 -13 , и аппаратура формирования синхрочастот и бортовой шкалы времени. Управление навигационным комплексом обеспечивает бортовой компьютер.
Наземный комплекс управления
Этот комплекс предназначен для контроля за правильностью функционирования и управления всеми КА системы. В него входят центр управления системой с баллистическим центром, центральный синхронизатор и сеть наземных контрольно-измерительных станций (КИС), расположенных на территории России. Определение и прогноз параметров движения спутника осуществляются в баллистическом центре на основе результатов траекторных измерений дальности и радиальной скорости КА, поступающих от контрольно-измерительных станций. В наземном комплексе имеется три КИС.
Поскольку шкалы времени как UTC (SU), так и универсальной системы отсчета UTC не непрерывны, они периодически корректируются (обычно 30 июня либо 31 декабря) на целое число секунд по собственным эталонам. Значение секундного расхождения может быть снижено за счет коррекции шкалы UTC (SU) Госэталона частоты и времени РФ. Последняя коррекция на 9 мкс, произведенная 26 ноября 1996 г., позволила уменьшить расхождение между UTC (SU) и UTC до уровня 1мкс.
По мнению экспертов, существующие различия систем отсчета времени и координат не являются принципиальными и могут быть устранены введением соответствующих преобразований.
Будущее космической навигации
Аналогичное решение было принято в США, где 5 января 1999 г. объявлено о выделении 400 млн долл. на модернизацию системы GPS, связанную с передачей C/A-кода на частоте L2 (1222,7 МГц) и введением третьей несущей L3 (1176,45 МГц) на КА, которые будут запускаться с 2005 г. Сигнал на частоте L2 намечено использовать для гражданских нужд, непосредственно не связанных с опасностью для жизни людей. Предлагается начать реализацию этого решения с 2003 г. Третий гражданский сигнал на частоте L3 решено использовать для нужд гражданской авиации.
ОБ АВТОРЕ
Частотный план
Сначала (см. рисунок) общее число рабочих частот было сокращено с 24 до 20, что позволило устранить влияние узкополосных навигационных радиосигналов на работу астрономических служб.
Наконец, после 2005 г. на орбите начнут функционировать модернизированные КА, использующие 12 несущих частот с номерами n= -7. +4 и технологические частоты n=5 и n=6.
Последние восемь символов в каждой строке являются проверочными символами кода Хэмминга, позволяющими исправлять одиночный ошибочный символ и обнаруживать два ошибочных символа в строке.Альманах системы необходим аппаратуре потребителя для планирования сеанса, т.е. выбора оптимального созвездия и прогнозирования для составляющих его НКА доплеровского сдвига несущей частоты.
Отсутствие альманаха системы в памяти приемника потребителя приводит к значительному увеличению длительности сеанса, за счет времени, затрачиваемого на поиск сигналов и определение оптимального созвездия.
Тем не менее, структура навигационного сигнала СНС ГЛОНАСС обеспечивает более быстрое обновление (или первичный прием) альманаха за счет меньшей длительности суперкадров (2,5 мин) по сравнению с GPS (12,5 мин). Оперативная информация используется непосредственно в сеансе навигации. Частотно-временные поправки вносятся в результаты измерений, а эфемериды применяются при определении координат и вектора скорости потребителя.
время начала кадра tk;
эфемеридную информацию координаты и производные координат НКА в прямоугольной геоцентрической системе координат на момент времени f0;
частотно-временные поправки (ЧВП) на момент времени (ь в виде относительной поправки к несущей частоте навигационного радиосигнала и поправки к бортовой шкале времени НКА;
Неоперативная информация содержит альманах системы, включающий в себя:
данные о состоянии всех НКА системы (альманах состояния);
время, к которому относится альманах;
параметры орбиты всех НКА (альманах орбит);
номер пары несущих частот и поправку к БШВ для каждого НКА (альманах фаз); поправку шкалы времени системы ГЛОНАСС относительно UTC(SU), погрешность поправки не более 1 мкс.
Структура кадра и суперкадра
Кадр имеет длительность 30 с и состоит из 15 строк длительностью 2 с каждая. Он содержит полный объем оперативной инсрормации для излучающего НКА (строки 1 . 4) и четверть альманаха. В кадрах с первого по четвертый передается альманах по пяти спутникам, в пятом кадре по оставшимся четырем. Альманах для каждого спутника занимает по две строки. Супер кадр содержит 5 кадров и длится 2,5 мин. В пределах суперкадра оперативная информация и строка 5 (системные данные) повторяются в каждом кадре. Границы строк, кадров и суперкадров различных НКА синхронны с погрешностью не более 2 мс.
Распределение альманаха по кадрам суперкадра
/images/stories/main3/kontrol.JPG" alt="Распределение альманаха по кадрам суперкадра " width="400" height="159" border="0" />
На рисунке показана структура суперкадра и кадров, его составляющих.
Структура суперкадра и составляющих его кадров
Оперативная информация и эфемериды. Основываясь на данных, подробно рассмотрим содержание и соответствующие обозначения параметров эфемеридной информации. Условные обозначения параметров, разрядность, номер содержащей параметр строки. В словах, которые могут принимать положительные или отрицательные значения, старший разряд является знаковым, символ "О" соответствует знаку "плюс", а символ "1" - знаку "минус".
Разрядность, единицы измерения и диапазон значений слов оперативной информации
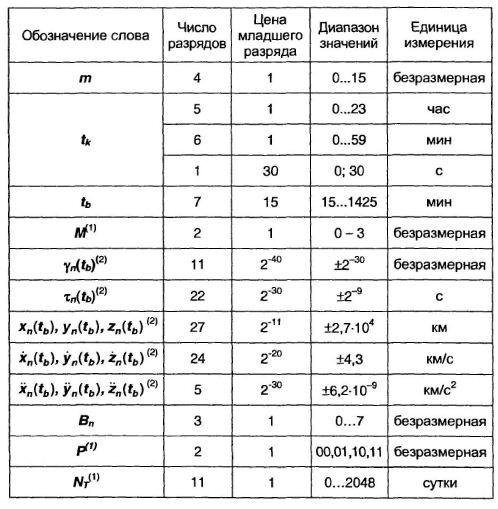
Слово m - номер строки в навигационном кадре. Слово tk - время начала кадра внутри текущих суток, исчисляемое в шкале бортового времени НКА. В пяти старших разрядах записывается количество целых часов, прошедших с начала текущих суток; в шести средних - число целых минут, в младшем - число тридцатисекундных интервалов, прошедших с начала текущей минуты.
Начало суток по бортовому времени НКА совпадает с началом очередного суперкадра. Слово Вn - признак недостоверности кадра. Аппаратура потребителя анализирует только старший разряд этого слова. Передача в нем "1" обозначает непригодность данного НКА для навигационных измерений.
Слово tb - порядковый номер временного интервала внутри текущих суток по шкале системного времени ГЛОНАСС, к середине которого относится передаваемая в кадре оперативная информация. Длительность данного временного интервала (и, соответственно, максимальное значение слова tb) определяется значением слова Р1. Слово Р1 - признак смены оперативной информации. Сообщает величину интервала времени между значениями tb (мин) в данном и предыдущем кадрах.
Значения слова Р1 и значение tb
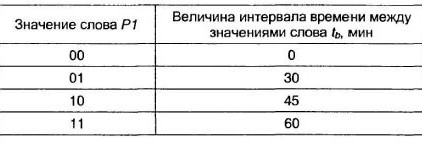
Слово Р2 - признак смены. Он представляет собой признак нечетности ("1") или четности ("О") порядкового номера b 30(60) - минутного текущего отрезка времени, середина которого оцифрована числовым значением слова tb.
Слово РЗ- признак, состояние " 1 " которого означает, что в данном кадре передается альманах для пяти, а состояние "О" - для четырех НКА.
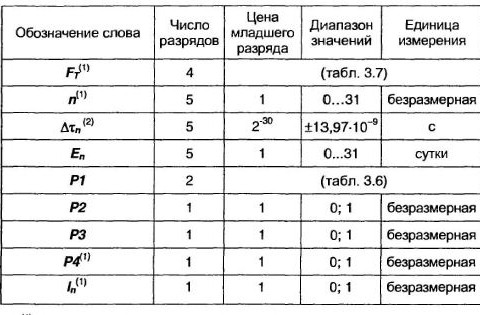
Слово Δtn - смещение излучаемого навигационного радиосигнала поддиапазона L2. относительно навигационного радиосигнала поддиапазона L1 для n-ю НКА.
где tn1, tn2 - аппаратурные задержки в соответствующих поддиапазонах. Слово Еп - характеризует "возраст" оперативной информации, т.е. интервал времени, прошедший от момента расчета (закладки) оперативной информации до момента времени *ьдля л-го спутника. Формируется на борту НКА. Слово Уn(tь) - относительное отклонение прогнозируемого значения несущей частоты излучаемого навигационного радиосигнала n-го спутника от номинального значения на момент времени tb
где tn(tb) - прогнозируемое значение несущей частоты излучаемого навигационного радиосигнала п-го спутника с учетом гравитационного и релятивистского эффектов на момент времени tb и tn - номинальное значение несущей частоты навигационного радиосигнала n-го спутника.
Слово tn(tb) - сдвиг шкалы времени л-го спутника t, относительно шкалы времени системы ГЛОНАСС tc, равный смещению по фазе ПСПД излучаемого навигационного радиосигнала л-го спутника относительно системного опорного сигнала на момент времени tb:
Слова Xn(tb),Yn(tb),Zn(tb) - координаты данного НКА в системе координат ПЗ-90 на момент времени tb.
Слова Xn(tb),Yn(tb),Zn(tb) - составляющие вектора скорости данного НКА в геодезической системе системе координат ПЗ-90 на момент времени tb.
Слова Xn(tb),Yn(tb),Zn(tb) - составляющие ускорения данного НКА в геодезической системе координат ПЗ-90 на момент времени tb, обусловленные действием Луны и Солнца. Следующие слова передаются спутниками серии ГЛОНАСС-М:
Слово М - признак модификации НКА, излучающего данный сигнал; "00" означает НКА ГЛОНАСС, "01" - ГЛОНАСС-М.
Слово Р- признак режима работы НКА по предоставлению частотно- временной информации (ЧВИ). Значения признака следующие:
00 - ретрансляция параметра тс, ретрансляция параметра TGPS;
01 - ретрансляция параметра тс, размножение параметра TGPS на борту НКА;
10 - размножение параметра тс на борту НКА, ретрансляция параметра TGPS;
11 - размножение параметра тс на борту НКА, размножение параметра TGPS на борту НКА.
Слово Р4- признак, смена состояния "0" или "1" которого означает, что в данном кадре передается обновленная эфемеридная или частотно-временная информация.
Слово Nt - текущая дата, календарный номер суток внутри четы рехлетн ого интервала, начинающегося с в и со костного года.
Слово n - номер НКА, излучающего данный сигнал и соответствующий его рабочей точке.
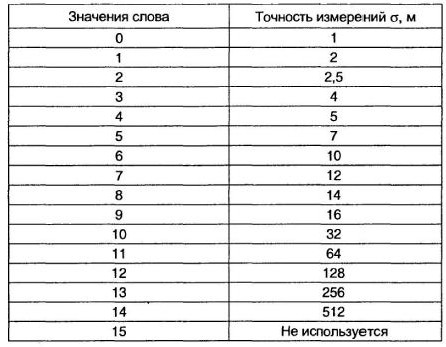
Значения слова Ft
Неоперативная информация (альманах системы). Рассмотрим содержание альманаха системы ГЛОНАСС: Слово тс - поправка к системной шкале времени ГЛОНАСС относительно UTC(SU). Поправка дана на начало суток с номером Na Слово Na - календарный номер суток внутри четырехлетнего периода, начиная с високостиого года, к которым относятся поправки tс и данные альманаха системы (альманахи орбит и фаз).
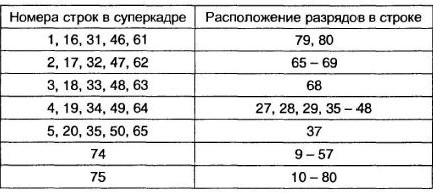
Резервные разряды в суперкадре. Совершенствование СНС ГЛОНАСС может потребовать ввода дополнительной информации в суперкадр. Она размещается за счет резервных разрядов в массиве данных. Часть резерва была задействована при разработке модификации ГЛОНАСС-М. Расположение оставшихся разрядов.
Используется сплошная нумерация строк в пределах суперкадра, без разбиения на кадры. Контроль достоверности навигационных данных. Применяемый при кодировании навигационной информации СНС ГЛОНАСС код Хэмминга позволяет исправлять одиночные ошибки на стороне потребителя, когда неверно принят один разряд строки, и обнаруживать четное число ошибок (2, 4, . неверных разрядов). Строка навигационной информации состоит из 85 разрядов, где старшие 77 разрядов содержат информационные символы (b85, b84 . Ь10,b9), а младшие 8 разрядов - проверочные символы (B8, B7. . B1).
Размещение резервных разрядов в суперкадре
Проверка и исправление навигационной информации происходит с применением контрольных сумм. Вычисление контрольных сумм производится в соответствии с алгоритмом, приведенным ниже.
Для исправления однократных ошибок в строках формируются контрольные суммы С1, С2, . С7, а для обнаружения четного числа ошибок вычисляется контрольная сумма С1. Далее вычисленные контрольные суммы анализируются и принимается решение о наличии ошибок, исправлении одиночной ошибки или выбраковке строки. Решение принимается в соответствии со следующими правилами: 1. Строка считается неискаженной, если все контрольные суммы C1 , C2. С7 и сумма Сz равны нулю, либо лишь одна из контрольных сумм С1, С2. С7 равна единице и при этом Cz = 1. 2. Если две или более контрольных сумм С1. С7 равны единице и Cz = 1, то символ Ьcор в разряде с порядковым номером icor= C7C6C5C4C3C2C1 + 8 - K((при условии, что iKop больше или равно 85), считается искаженным и исправляется на противоположный.
Двоичное число C7C6C5C4C3C2С1 формируется из контрольных сумм записью младшими разрядами вправо. К - номер старшей из отличных от нуля контрольных сумм. Если получается, что iKop больше или равно 85, это означает факт наличия нечетного числа кратных ошибок и строка бракуется. 3. Если хотя бы одна из контрольных сумм С1, С2. С7 равна единице, а Сz = 0, или все контрольные суммы C1, C2. С7 равны нулю, а Сz - 1, это означает наличие кратных ошибок и строка бракуется.
В случае выбраковки строки (строк) навигационная информация считается недостоверной. Аппаратура потребителя должна произвести повторный прием навигационной инйзормации. Пример алгоритма вычисления контрольных сумм при проверке достоверности информации в строке.
1. Общие характеристики, принципы построения и функционирования CНС
Спутниковые навигационные системы (СНС) – это радионавигационные системы (РНС), в которых используются радионавигационные поля, формируемые радионавигационными точками (РНТ) в виде искусственных спутников земли – космических аппаратов (КА), несущих навигационную аппаратуру. Космические аппараты являются аналогом неподвижных РНТ, представляющих собой опорные пункты наземных РНС.
К СНС, получившим наибольшее распространение относятся Российская система ГЛОНАСС (ГЛОбальная НАвигационная Спутниковая Система) и Американская НАВСТАР (NAVigation System for Timing And Ranging), имеющая также название GPS (Global Positioning System).
Особенности СНС
Быстрое развитие и расширяющееся использование СНС обусловлены достоинствами, вытекающими из особенностей их структуры.
К этим особенностям можно отнести:
1. Высокая скорость относительного перемещения КА и потребителя. С ней связаны возможности:
- применения радиально-скоростного метода навигационных определений и высокий уровень быстродействия всех звеньев системы;
- в течение ограниченных интервалов времени получать значительные объемы измерительной информации;
- для навигационных определений при числе КА, меньшем числа определяемых координат.
2. Работа в диапазоне УКВ. С чем связана возможность использования широкополосных сигналов и их пространственной селекции.
3. Орбитальное движение передатчика сигналов позволяет каждым из них обслуживать обширные территории, примыкающие к следу орбиты, ширина которых возрастает с увеличением высоты орбиты.
СНС ГЛОНАСС и GPS основанные на использовании координированной по движению и излучению сигналов сети КА, выступают как глобальные навигационные спутниковые системы непрерывного действия и практически мгновенных навигационных определений.
Общая характеристика элементов СНС
Несмотря на различия в системах ГЛОНАСС и GPS в их составе могут быть выделены следующие подсистемы:
- подсистемы космических аппаратов (ПКА);
- подсистемы контроля и управления (ПКУ);
- навигационной аппаратуры потребителей (НАП).
Далее дадим краткую характеристику каждой подсистеме.
ПКА выбирается из соображений обеспечения заданной кратности глобального покрытия зонами видимости, заданной точности местоопределения и минимальной взаимной интерференции принимаемых сигналов. Для СНС наиболее выгоднейшей конфигураций признана система из 24 КА, размещенных равномерно на круговых орбитах, высотой около 20000 км.
Каждый КА такой сети дважды в сутки пересекает экватор. Подспутниковая точка перемещается по замкнутой кривой, две волны которой охватывают все долготы. Все КА сети излучают сигналы одинаковой структуры, используемые для измерений дальности и радиальной скорости. Индивидуальным для каждого КА является содержание передаваемой им служебной информации. Наряду с этим применяются различные способы доступа к используемым сигналам.
Одновременно с гражданскими потребителями СНС также обслуживают и военных потребителей (корабли, самолеты, КА, наземные транспортные средства, десантные группы и т. п.). К сигналу, обеспечивающему предельно точную навигацию, имели доступ только военные потребители, а для других потребителей он затруднен.
Содержанием служебной информации являются: частотно-временные поправки для данного КА и его эфемериды, альманах, телеметрическая (ТЛМ) информация, ключевые слова, поправки на распространение радиоволн и иная информация, повышающаяся точность и надежность навигационного сеанса. Вся эта информация компонуется определенным образом в виде кадра, распадающегося на строки, и передается с известной периодичностью.
Служит для управления полетом и работой бортовых систем всех КА как носителей навигационных сигналов и в первую очередь для снабжения их информацией, необходимой для проведения высокоточных и надежных навигационных сеансов. В число задач комплекса входят:
- проведение траекторных измерений для определения орбит всех КА и временных измерений для определения расхождений бортовых шкал времени всех КА с системным временем;
- предсказание для каждого КА его будущих эфемерид и ухода бортового времени; формирование массива служебной информации с включением в него спрогнозированных эфемерид, альманаха и поправки бортовой шкалы времени, а также прочих поправок для каждого КА;
- закладка массива служебной информации в память каждого КА для модуляции навигационных сигналов;
- контроль по телеметрическим каналам за работой систем сети КА и диагностика их состояния;
- управление по командному каналу полетом всех КА и работой их бортовых систем.
Издревле люди использовали для навигации (т. е. точного определения курса на основе сведений о местоположении объекта) днем солнце, а ночью - звезды. Но иногда небо покрывается тучами, и тогда определить свое местоположение почти невозможно. Сегодня, когда в небе "зажглись" искусственные "звезды" систем спутниковой навигации, путнику уже не грозит опасность сбиться с пути.
Первые системы спутниковой навигации создавались исключительно для военных нужд, однако в настоящее время они широко применяются в гражданских целях. С их помощью осуществляется контроль за транспортными и грузовыми перевозками (автомобильными, железнодорожными, морскими), отслеживается местонахождение потерянных или угнанных транспортных средств, ведется поиск людей в чрезвычайных ситуациях, проводятся исследования миграции животных.
Существуют два основных способа определения местоположения. Первый предполагает наличие у абонента стандартной навигационной аппаратуры, которая позволяет с заданной точностью определять координаты. Второй метод основан на определении координат по доплеровскому сдвигу частоты и не требует использования специальной навигационной аппаратуры.
Системы GPS и "Глонасс"
Глобальная навигационная система GPS (Global Positioning System), известная также как Navstar (Navigaion System with Time and Ranging - Навигационная система определения времени и дальности), предназначена для передачи навигационных сигналов, которые могут одновременно приниматься во всех регионах мира. Система была разработана по заказу Министерства обороны США, а космические аппараты (КА) изготовила компания Rockwell International.
Российская спутниковая навигационная система (СНС) аналогичного назначения, известная под названием "Глонасс" (Глобальная навигационная спутниковая система) разрабатывалась по заказу Министерства обороны России, но сейчас применяется для предоставления навигационных услуг различным категориям потребителей - без каких-либо ограничений. Орбитальная группировка российской системы навигации была развернута в начале 90-х гг., а ее коммерческая эксплуатация осуществляется с 1995 г.
Архитектура и основные характеристики
Системы GPS и "Глонасс" имеют сходную архитектуру. В их состав входят космический сегмент, состоящий из 24 КА, сеть наземных станций наблюдения за их работой и пользовательский сегмент (навигационные приемники). Все спутники GPS/"Глонасс" являются автономными. Параметры их орбит периодически контролируются сетью наземных станций слежения, с помощью которых (не реже 1-2 раз в сутки) вычисляются баллистические характеристики, регистрируются отклонения КА от расчетных траекторий движения и определяется собственное время бортовых часов.
Наземные станции также контролируют исправность навигационной аппаратуры, установленной на борту КА. Для обнаружения отказов аппаратуры требуется, как минимум, несколько часов.
Целостность характеризует способность системы обнаруживать свое неправильное функционирование и исключать возможность использования ее данных пользователями при недопустимых отклонениях рабочих характеристик. Фактически, когда речь идет о целостности системы, основной информацией являются данные о состоянии спутников и их неисправностях. Показатель целостности системы - это вероятность оповещения потребителей при нарушении ее работы системы в пределах допустимого временного периода.
ИСЗ оборудуются двухдиапазонными излучателями, работающими в полосе L1 (1575,42 МГц -19 м) и полосе L2 (1227,60 МГц - 24 м), причем в первой полосе сигнал кодируется кодом общего доступа С/А, обеспечивающим режим захвата и грубого измерения, а также кодом Р, предназначенным для точных измерений и защищенным от несанкционированного доступа. Вторая полоса кодируется только кодом Р . Специальный математический алгоритм кодирования полезного сигнала с высокой вероятностью обеспечивает опознавание его случайным абонентом в качестве "белого шума". Отмечается, что принятая в этой СНС система кодирования сигналов обеспечивает существенное расширение числа физических принципов определения местоположения (в более ранней системе Transit, фактически, использовался только доплеровский эффект и невозможно было, в частности, прямое измерение псевдодальности).
Структура навигационных сигналов GPS
Каждый GPS-спутник излучает на двух частотах (L1 и L2) специальный навигационный сигнал в виде фазоманипулированной псевдослучайной последовательности. В сигнале зашифровываются два вида кода. Один из них - код С/А (coarse/acquisition, или clear/acquisition) - доступен широкому кругу гражданских потребителей. Он позволяет получать лишь приблизительную оценку местоположения, поэтому называется "грубым" кодом. Передача кода С/А осуществляется на частоте L1 с использованием фазовой манипуляции псевдослучайной последовательности длиной 1023 символа. Защита от ошибок обеспечивается с помощью кода Гоулда. Период повторения С/А-кода - 1 мс. Тактовая частота - 1,023 МГц.
Другой код - P (precision code), обеспечивает более точное вычисление координат, но пользоваться им способны не все; доступ к нему ограничивается провайдером услуг GPS. В основном P-код предоставляется военным и федеральным службам США. Этот код передается на частоте L2 с применением сверхдлинной псевдослучайной последовательности с периодом повторения 267 дней. Тактовая частота - 10,23 МГц. Кроме этих кодов в сигнале GPS может присутствовать так называемый Y-код, являющийся шифрованной версией P-кода.
Использование стандартных навигационных приемников GPS/"Глонасс"
Координаты подвижного абонента определяются с помощью стандартного навигационного GPS- или GPS/"Глонасс"-приемника ( рисунок 1 ), встроенного в терминал пользователя. Устройство, как правило, использует собственную миниатюрную антенну и автономно вычисляет географические координаты и всемирное время (UTC) по навигационным сигналам. В отдельных случаях навигационная антенна совмещается со связной антенной абонентского терминала (например, в системе Inmarsat-C), а прием навигационных данных может осуществляться как в обслуживаемом, так и в необслуживаемом режимах его работы.
Рисунок 1. Схема определения координат объекта в системах спутниковой связи с использованием GPS/"Глоннас"-приемников
GPS/"Глонасс"-приемники чаще всего применяются, если необходимо получить высокую точность координат (погрешность не более 100 м). Захватив сигнал, навигационный приемник автоматически вычисляет координаты объекта, скорость сигнала и всемирное время и формирует отчет. Сведения о местонахождении объекта передаются по спутниковым каналам связи в диспетчерский пункт.
Навигационные устройства могут различаться по количеству каналов приема, скорости обновления данных, времени вычислений, точности и надежности определения координат. Современные GPS-устройства обычно оснащены 6-8 приемниками, что позволяет отслеживать практически все навигационные спутники, находящиеся в зоне радиовидимости объекта. Если каналов меньше, чем "наблюдаемых" спутников, автоматически выбирается наиболее оптимальное сочетание КА. Скорость обновления навигационных данных - 1 с. Время обнаружения зависит от числа одновременно наблюдаемых спутников и режима определения местоположения.
Определение навигационных параметров может производиться в двух режимах - 2D (двумерном) и 3D (пространственном). В режиме 2D устанавливается широта и долгота (высота считается известной); для этого достаточно присутствия в зоне радиовидимости трех спутников. Время определения координат в режиме 2D обычно не превышает 2 мин. Для определения пространственных координат абонента (режим 3D) требуется, чтобы в соответствующей зоне находились не менее четырех КА. Гарантируются время обнаружения не более 3-4 мин и погрешность вычисления координат не более 100 м. Комбинированные GPS/"Глонасс"-приемники с обобщенным алгоритмом определения местоположения даже при использовании стандартного С/А-кода обеспечивают более высокую точность (15-20 м).
Навигационный приемник сигналов для системы GPS состоит из приемного модуля и малогабаритной антенны с малошумящим усилителем. Приемный модуль выпускается как в виде автономного устройства со встроенными источниками питания, так и в виде отдельной платы, встраиваемой в абонентский терминал. К сожалению, массовый выпуск малогабаритных и относительно дешевых приемников "Глонасс" пока не налажен, поэтому услугой определения местонахождения с помощью этих приемников пользуются преимущественно российские потребители, да и то лишь в системах специального назначения.
- геометрический фактор снижения точности (GDOP) говорит о степени влияния погрешностей псевдодальности (последняя характеризует меру удаленности потребителя от GPS-спутника) показаний часов на точность вычисления координат. Зависит от положения спутника относительно GPS-приемника и от смещения показания GPS-часов. Различие значений псевдодальности и фактической дальности связано со смещением показаний часов GPS-спутника и потребителя, а также с задержками распространения и другими ошибками.
- горизонтальный фактор снижения точности (HDOP) показывает степень влияния точности определения горизонтали на погрешность вычисления координат;
- фактор снижения точности определения положения (PDOP) - это безразмерный показатель, который описывает, как влияет на точность определения координат погрешность псевдодальности;
- относительный фактор снижения точности (RDOP) по сути равен фактору снижения точности, нормализованному на период, составляющий 60 с;
- временной фактор снижения точности (TDOP) описывает степень влияния погрешности показаний часов на точность определения координат;
- вертикальный фактор снижения точности (VDOP) показывает степень влияния погрешности в вертикальной плоскости на точность определения координат.
Основными источниками ошибок, влияющими на точность навигационных вычислений, являются следующие.
Погрешности, обусловленные режимом селективного доступа (Selective availability, S/A). Реализуя этот режим, провайдер услуг GPS (Министерство обороны США) намеренно снижает точность определения местонахождения для гражданских потребителей. В режиме S/A формируются ошибки искусственного происхождения, вносимые в сигнал на борту GPS-спутников с целью загрубления навигационных измерений. Такими ошибками являются неверные данные об орбите спутника и искажения показаний его часов за счет внесения добавочного псевдослучайного сигнала. Величина среднеквадратической ошибки из-за влияния этого фактора составляет примерно 30 м.
Погрешности, обусловленные распространением радиоволн в тропосфере. Возникают при прохождении радиоволн через нижние слои атмосферы. Значения погрешностей этого вида при использовании сигналов с С/А-кодом не превышают 30 м.
Эфемеридная погрешность. Ошибки обусловлены расхождением между фактическим положением GPS-спутника и его расчетным положением, которое устанавливается по данным навигационного сигнала, передаваемого с борта КА. Значение погрешности обычно не больше 3 м.
Погрешность ухода шкалы времени спутника обусловлена расхождением шкал времени различных спутников. Устраняется с помощью наземных станций слежения или за счет компенсации ухода шкалы времени в дифференциальном режиме определения местоположения.
Погрешность определения расстояния до спутника. Данный показатель является статистическим, он вычисляется для конкретного спутника и заданного интервала времени. Ошибка не коррелирована с другими видами погрешностей. Ее величина обычно не превышает 10 м.
Методы повышения точности навигационных определений
Метод дифференциальных поправок
Один из основных методов повышения точности определения местонахождения объекта и устранения ошибок, связанных с введением режима селективного доступа, основан на применении известного в радионавигации принципа дифференциальных навигационных измерений.
Дифференциальный режим DGPS (Differential GPS) позволяет установить координаты с точностью до 5 м в динамической навигационной обстановке и до 2 м - в стационарных условиях. Дифференциальный режим реализуется с помощью контрольного GPS-приемника, называемого опорной станцией. Она располагается в пункте с известными координатами, в том же районе, что и основной GPS-приемник, и дает возможность одновременно отслеживать GPS-спутники.
Аппаратура потребителя включает в себя GPS-приемник с антенной, оснащенный процессором и дополнительным радиоприемником с антенной, который и позволяет получать дифференциальные поправки с опорной станции. Поправки, принятые от опорной станции, автоматически вносятся в результаты собственных измерений пользовательских устройств.
Результаты, полученные с помощью дифференциального метода, в значительной степени зависят от расстояния между объектом и опорной станцией. Применение этого метода наиболее эффективно, когда преобладающими являются систематические ошибки, обусловленные внешними (по отношению к приемнику) причинами, что обычно характерно для системы GPS.
Погрешности S/А и "уходы" шкалы времени компенсируются в дифференциальном режиме полностью. Погрешности вследствие задержки сигналов в атмосфере зависят от идентичности условий прохождения сигналов к опорной станции и объекту, а следовательно, от расстояния между ними. Эти погрешности компенсируются полностью лишь при близком расположении опорной станции и объекта. Эфемеридная погрешность также лучше всего компенсируется при небольшом удалении потребителя от опорной станции. По данным причинам опорную станцию рекомендуется располагать не далее 500 км от объекта.
Методы контроля за целостностью
Основными достоинствами навигационных систем GPS и "Глонасс" являются глобальность обслуживания, высокая точность и непрерывность определения координат и скорости движения объекта. Кроме того, обе системы обладают возможностями повышения точности и надежности навигационных измерений в результате применения дифференциального режима.
Действуя в штатном и дифференциальном режимах, эти навигационные системы полностью удовлетворяют требованиям точности при определении местоположения гражданских потребителей. Однако в глобальной рабочей зоне существующие системы GPS и "Глонасс", использующие КА на негеостационарных круговых орбитах, не вполне отвечают требованиям отдельных категорий пользователей. В первую очередь, это касается авиации, где необходимы информация о целостности систем GPS и "Глонасс" и высокая точность навигационных данных о доступности объекта.
Системы с геостационарными КА способны мгновенно оценивать текущее состояние орбитальных группировок GPS/"Глонасс" и своевременно оповещать об этом потребителей. Кроме того, пользовательская аппаратура может быть оснащена устройством для получения дополнительного навигационного сигнала, повышающего точность навигационных параметров.
В настоящее время ведутся работы по улучшению показателей доступности и целостности систем GPS/"Глонасс", особенно в части повышения достоверности контроля за их работоспособностью и сокращения времени оповещения объекта о целостности системы.
Возможны два варианта контроля за целостностью системы, основанные на внутренних и внешних методах контроля.
Внутренние методы предполагают использование избыточной информации навигационных датчиков потребителя, которую они получают, принимая навигационные сигналы от большего, чем минимально необходимо, числа спутников. С помощью специальных алгоритмов легко обнаружить и/или идентифицировать источник неправильной информации. При обнаружении источника производится полная отбраковка полученных решений навигационных задач; если же спутник, передающий неверные данные, точно идентифицирован, то из расчетов исключаются только те параметры, которые были определены по сигналам этого КА.
Процедура внешнего контроля является более сложной, поскольку требует создания наземной сети. Однако такое решение задачи целостности позволяет получить более полную информацию о системе, которой принципиально не может располагать отдельный потребитель при автономном контроле за целостностью. В частности, внешние методы контроля позволяют точно определять координаты КА в орбитальных группировках систем GPS и "Глонасс", а также точные поправки для синхронизации временных шкал геостационарных КА и спутников GPS/"Глонасс".
Читайте также: